五年级全一册信息技术苏科版14.声音控制小猫动作 教案(表格式)
文档属性
| 名称 | 五年级全一册信息技术苏科版14.声音控制小猫动作 教案(表格式) |
|
|
| 格式 | docx | ||
| 文件大小 | 1.2MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2024-03-04 00:00:00 | ||
图片预览
文档简介
主备人 实施人 实施时间 总第 课时
课 题 14.声音控制小猫动作
教 学 目 标 认识开源硬件Arduino。 学习使用软件控制开源硬件 学习使用声音传感器
教学重点 认识开源硬件Arduino。
教学难点 学习使用软件控制开源硬件,使用声音传感器控制小猫移动
教学准备 开源硬件Arduino和xDing开源软件
教 学 过 程 二次备课
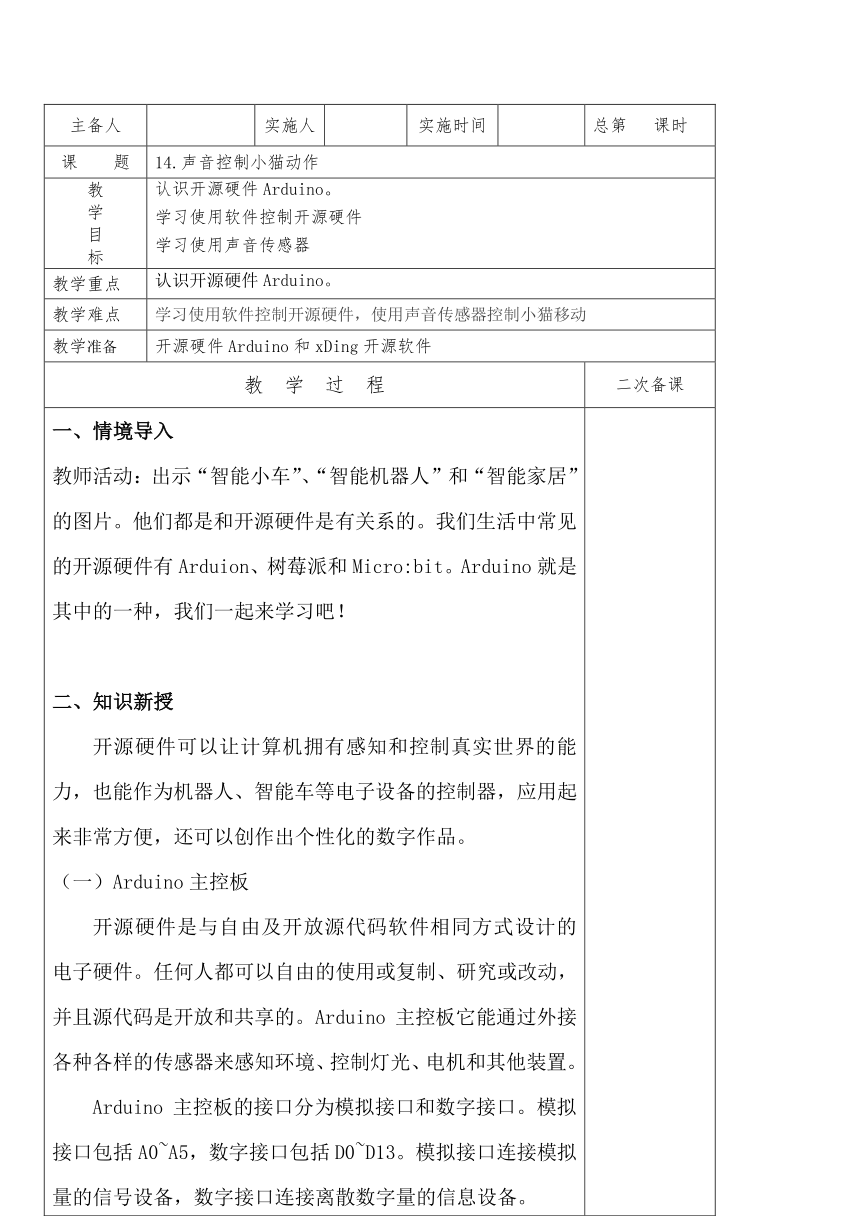
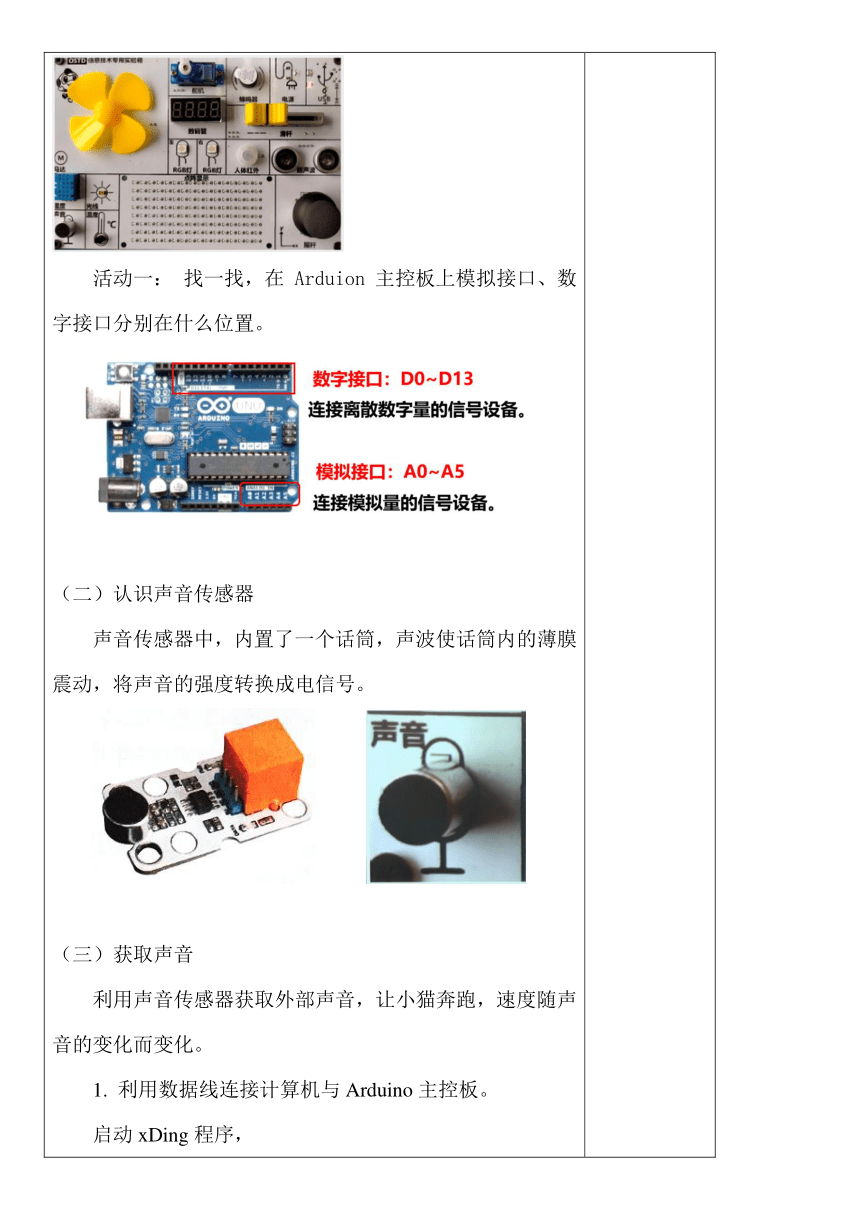
一、情境导入 教师活动:出示“智能小车”、“智能机器人”和“智能家居” 的图片。他们都是和开源硬件是有关系的。我们生活中常见的开源硬件有Arduion、树莓派和Micro:bit。Arduino就是其中的一种,我们一起来学习吧! 二、知识新授 开源硬件可以让计算机拥有感知和控制真实世界的能力,也能作为机器人、智能车等电子设备的控制器,应用起来非常方便,还可以创作出个性化的数字作品。 (一)Arduino主控板 开源硬件是与自由及开放源代码软件相同方式设计的电子硬件。任何人都可以自由的使用或复制、研究或改动,并且源代码是开放和共享的。Arduino主控板它能通过外接各种各样的传感器来感知环境、控制灯光、电机和其他装置。 Arduino主控板的接口分为模拟接口和数字接口。模拟接口包括A0~A5,数字接口包括D0~D13。模拟接口连接模拟量的信号设备,数字接口连接离散数字量的信息设备。 活动一: 找一找,在Arduion主控板上模拟接口、数字接口分别在什么位置。 (二)认识声音传感器 声音传感器中,内置了一个话筒,声波使话筒内的薄膜震动,将声音的强度转换成电信号。 (三)获取声音 利用声音传感器获取外部声音,让小猫奔跑,速度随声音的变化而变化。 1. 利用数据线连接计算机与Arduino主控板。 启动xDing程序, 单击“控制面板”—ArduinoUno 单击“连接”菜单---串口,并选择正确的串口号,连接主控板。 2.首次使用xDing与主控板实时通信,必须先“安装固件”。 单击连接菜单栏的安装固件命令,下载完成后,xDing与主控板之间就可以实现通信了。 3.单击机器人模块,显示Arduion使用控件,利用这些控件可以控制各种传感器、电机等设备。 4.添加角色和背景 5.将声音传感器与主控板连接。 声音传感器A0与主控板A2相连 声音传感器5V与主控板5V相连 声音传感器上的GND与主控板GND相连 6.小猫随声音变化移动脚本 三、拓展延伸 添加小猫脚本,让小猫在奔跑的过程中有相应的动作造型,是动画效果看起来更加逼真。 当小猫移动的速度设置为下图时,如何改变数值可以加快或减慢小猫移动的速度?请你试试看。 四、课堂总结 了解什么是开源硬件 使用开源软件xDing控制开源硬件 学习使用声音传感器控制小猫动作
板书设计
教学反思
课 题 14.声音控制小猫动作
教 学 目 标 认识开源硬件Arduino。 学习使用软件控制开源硬件 学习使用声音传感器
教学重点 认识开源硬件Arduino。
教学难点 学习使用软件控制开源硬件,使用声音传感器控制小猫移动
教学准备 开源硬件Arduino和xDing开源软件
教 学 过 程 二次备课
一、情境导入 教师活动:出示“智能小车”、“智能机器人”和“智能家居” 的图片。他们都是和开源硬件是有关系的。我们生活中常见的开源硬件有Arduion、树莓派和Micro:bit。Arduino就是其中的一种,我们一起来学习吧! 二、知识新授 开源硬件可以让计算机拥有感知和控制真实世界的能力,也能作为机器人、智能车等电子设备的控制器,应用起来非常方便,还可以创作出个性化的数字作品。 (一)Arduino主控板 开源硬件是与自由及开放源代码软件相同方式设计的电子硬件。任何人都可以自由的使用或复制、研究或改动,并且源代码是开放和共享的。Arduino主控板它能通过外接各种各样的传感器来感知环境、控制灯光、电机和其他装置。 Arduino主控板的接口分为模拟接口和数字接口。模拟接口包括A0~A5,数字接口包括D0~D13。模拟接口连接模拟量的信号设备,数字接口连接离散数字量的信息设备。 活动一: 找一找,在Arduion主控板上模拟接口、数字接口分别在什么位置。 (二)认识声音传感器 声音传感器中,内置了一个话筒,声波使话筒内的薄膜震动,将声音的强度转换成电信号。 (三)获取声音 利用声音传感器获取外部声音,让小猫奔跑,速度随声音的变化而变化。 1. 利用数据线连接计算机与Arduino主控板。 启动xDing程序, 单击“控制面板”—ArduinoUno 单击“连接”菜单---串口,并选择正确的串口号,连接主控板。 2.首次使用xDing与主控板实时通信,必须先“安装固件”。 单击连接菜单栏的安装固件命令,下载完成后,xDing与主控板之间就可以实现通信了。 3.单击机器人模块,显示Arduion使用控件,利用这些控件可以控制各种传感器、电机等设备。 4.添加角色和背景 5.将声音传感器与主控板连接。 声音传感器A0与主控板A2相连 声音传感器5V与主控板5V相连 声音传感器上的GND与主控板GND相连 6.小猫随声音变化移动脚本 三、拓展延伸 添加小猫脚本,让小猫在奔跑的过程中有相应的动作造型,是动画效果看起来更加逼真。 当小猫移动的速度设置为下图时,如何改变数值可以加快或减慢小猫移动的速度?请你试试看。 四、课堂总结 了解什么是开源硬件 使用开源软件xDing控制开源硬件 学习使用声音传感器控制小猫动作
板书设计
教学反思
同课章节目录