第十一章 简单机械和功——单元复习(课件)(共73张ppt) 苏科版 九年级全册
文档属性
| 名称 | 第十一章 简单机械和功——单元复习(课件)(共73张ppt) 苏科版 九年级全册 |
|
|
| 格式 | pptx | ||
| 文件大小 | 6.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-03-12 00:00:00 | ||
图片预览
文档简介
第十一章
江苏科学技术出版社
简单机械和功
九年级物理上册
从我们吃饭用的筷子,
到航天器使用的机械臂。
机械已深入到人类生活的方方面面,
无论多么复杂的机械都是由简单机械组成的。
我们在叹服于机械的神奇和人类伟大智慧的同时,
不禁产生许多遐想………
这些机械是依据什么原理工作的呢?
延伸人体的“神臂”
单元复习
①因ppt使用的视频质量高,故资源比较大(本ppt约56MB)。
②所用视频资源已全部内嵌在ppt中,不需另外下载。
③本节ppt共有75张,含有4个视频,可根据需要选择播放。
④本课件使用PowerPoint制作,建议使用PowerPoint播放。
⑤本ppt画面比例为 宽屏16:9。
①课堂总结——《杠杆》
②课堂总结——《功》
③课堂总结——《功率》
④课堂总结——《机械效率》
视频资源清单
一、杠杆
二、 滑轮
三、 功
四、功率
第十一章
简单机械和功
五、机械效率
杠 杆
一
本节
知识点
杠杆的平衡条件
02
什么是杠杆
01
生活中的杠杆
03
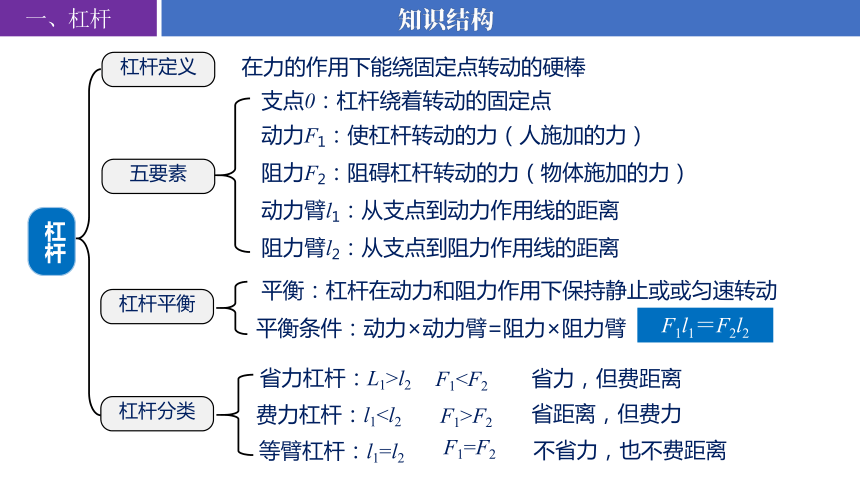
在力的作用下能绕固定点转动的硬棒
支点0:杠杆绕着转动的固定点
动力F1:使杠杆转动的力(人施加的力)
阻力F2:阻碍杠杆转动的力(物体施加的力)
动力臂l1:从支点到动力作用线的距离
阻力臂l2:从支点到阻力作用线的距离
平衡:杠杆在动力和阻力作用下保持静止或或匀速转动
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
省力杠杆:L1>l2
省力,但费距离
F1费力杠杆:l1F1>F2
省距离,但费力
等臂杠杆:l1=l2
F1=F2
不省力,也不费距离
杠杆定义
五要素
杠杆平衡
杠杆分类
杠杆
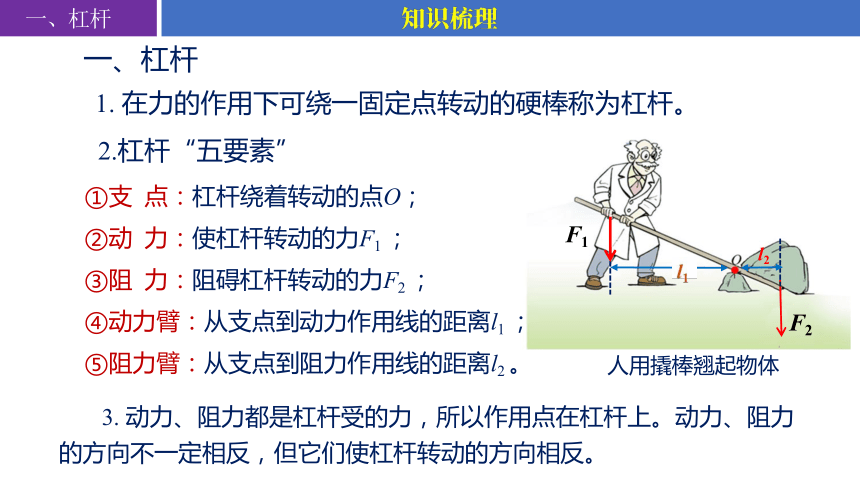
一、杠杆
1. 在力的作用下可绕一固定点转动的硬棒称为杠杆。
2.杠杆“五要素”
①支 点:杠杆绕着转动的点O;
②动 力:使杠杆转动的力F1 ;
③阻 力:阻碍杠杆转动的力F2 ;
④动力臂:从支点到动力作用线的距离l1 ;
⑤阻力臂:从支点到阻力作用线的距离l2 。
F2
F1
l2
人用撬棒翘起物体
3. 动力、阻力都是杠杆受的力,所以作用点在杠杆上。动力、阻力的方向不一定相反,但它们使杠杆转动的方向相反。
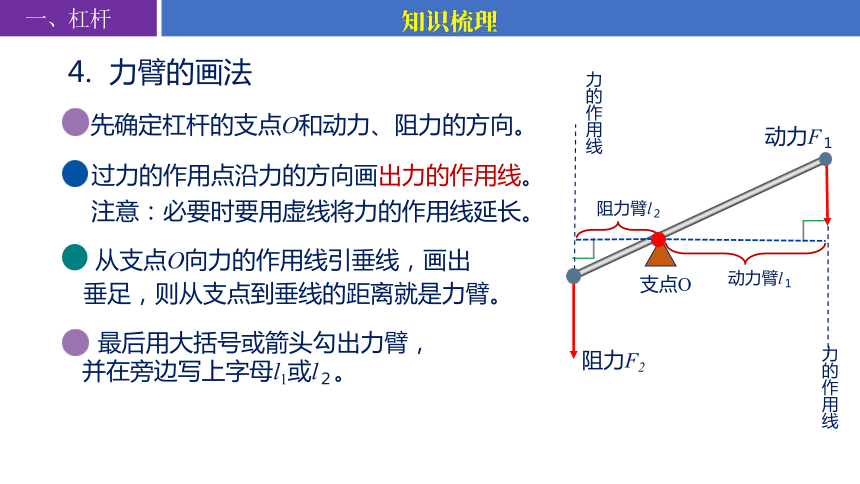
4. 力臂的画法
从支点O向力的作用线引垂线,画出
垂足,则从支点到垂线的距离就是力臂。
过力的作用点沿力的方向画出力的作用线。
注意:必要时要用虚线将力的作用线延长。
先确定杠杆的支点O和动力、阻力的方向。
最后用大括号或箭头勾出力臂,
并在旁边写上字母l1或l2。
阻力F2
动力F1
力的作用线
力的作用线
阻力臂l2
支点O
动力臂l1
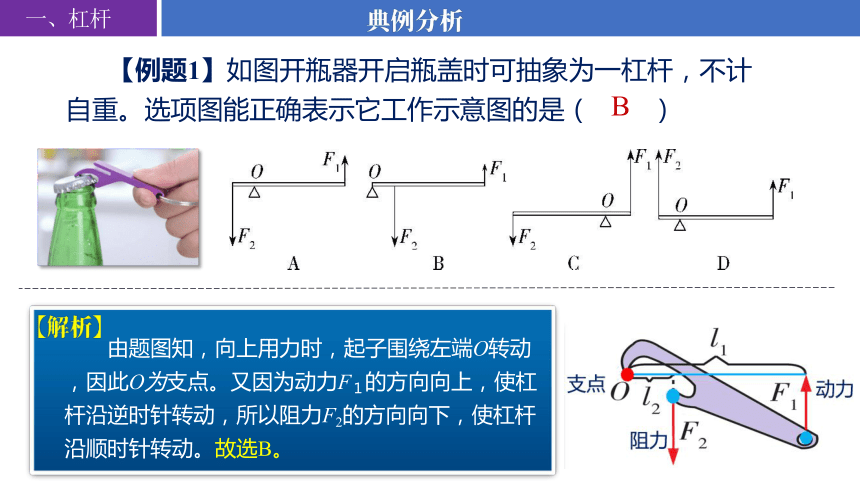
【例题1】如图开瓶器开启瓶盖时可抽象为一杠杆,不计自重。选项图能正确表示它工作示意图的是( )
由题图知,向上用力时,起子围绕左端O转动,因此O为支点。又因为动力F1的方向向上,使杠杆沿逆时针转动,所以阻力F2的方向向下,使杠杆沿顺时针转动。故选B。
???B
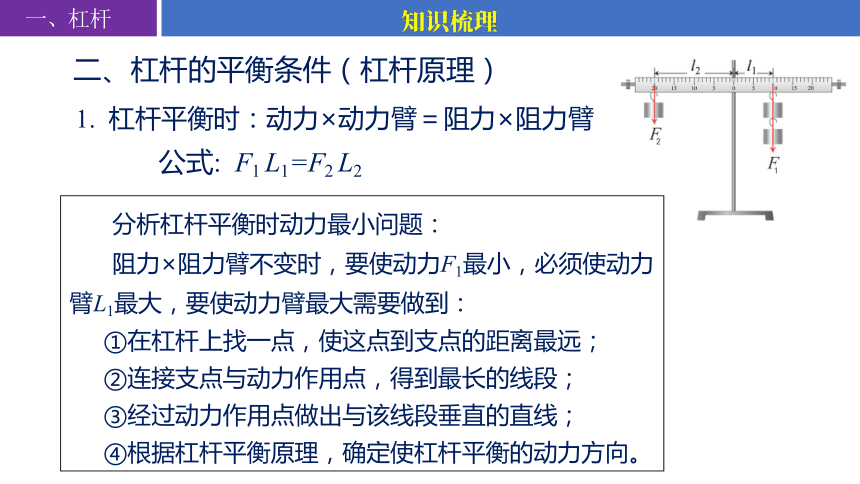
二、杠杆的平衡条件(杠杆原理)
1. 杠杆平衡时:动力×动力臂=阻力×阻力臂
公式: F1 L1=F2 L2
分析杠杆平衡时动力最小问题:
阻力×阻力臂不变时,要使动力F1最小,必须使动力臂L1最大,要使动力臂最大需要做到:
①在杠杆上找一点,使这点到支点的距离最远;
②连接支点与动力作用点,得到最长的线段;
③经过动力作用点做出与该线段垂直的直线;
④根据杠杆平衡原理,确定使杠杆平衡的动力方向。
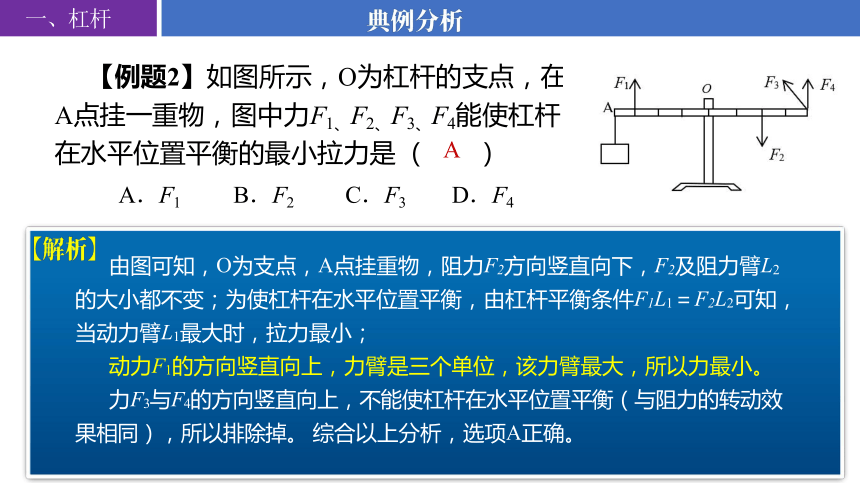
【例题2】如图所示,O为杠杆的支点,在A点挂一重物,图中力F1、F2、F3、F4能使杠杆在水平位置平衡的最小拉力是 ( )
A.F1 B.F2 C.F3 D.F4
由图可知,O为支点,A点挂重物,阻力F2方向竖直向下,F2及阻力臂L2的大小都不变;为使杠杆在水平位置平衡,由杠杆平衡条件F1L1=F2L2可知,当动力臂L1最大时,拉力最小;
动力F1的方向竖直向上,力臂是三个单位,该力臂最大,所以力最小。
力F3与F4的方向竖直向上,不能使杠杆在水平位置平衡(与阻力的转动效果相同),所以排除掉。 综合以上分析,选项A正确。
A
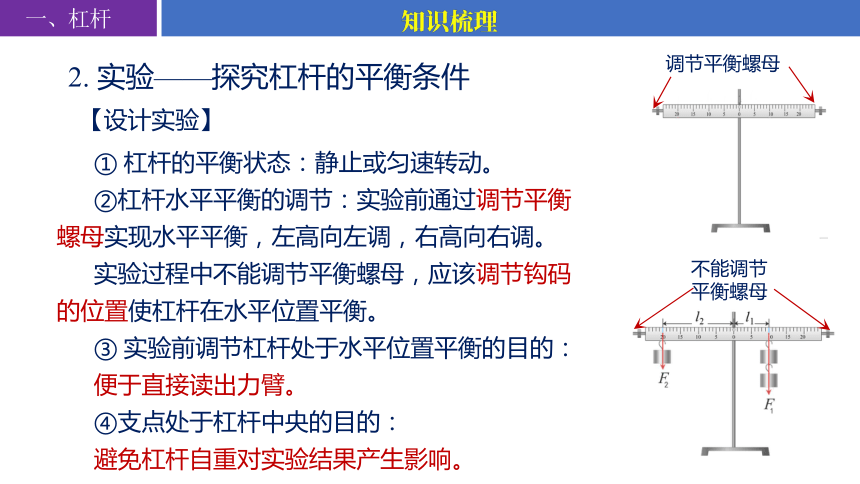
① 杠杆的平衡状态:静止或匀速转动。
②杠杆水平平衡的调节:实验前通过调节平衡螺母实现水平平衡,左高向左调,右高向右调。
实验过程中不能调节平衡螺母,应该调节钩码的位置使杠杆在水平位置平衡。
③ 实验前调节杠杆处于水平位置平衡的目的:
便于直接读出力臂。
④支点处于杠杆中央的目的:
避免杠杆自重对实验结果产生影响。
2. 实验——探究杠杆的平衡条件
【设计实验】
不能调节
平衡螺母
调节平衡螺母
⑤进行多次实验的目的:
减小偶然性对实验结果的影响,使实验结论具有普遍性。
①将一端的钩码换成弹簧测力计的好处是:可直接读出力的大小。
②弹簧测力计从竖直拉杠杆变成倾斜拉杠杆时,测力计的示数:
将变大 (拉力力臂变小,弹簧测力计示数变大)。
【分析数据,总结结论】
【交流与反思】
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
【例题3】利用图中的装置探究杠杆平衡的条件,每个钩码的质量相等,杠杆上的刻度均匀?
①当不挂钩码时,出现杠杆右端下沉,应向_____(选填“左”或“右”)调节平衡螺母,直至杠杆在水平位置平衡;如图甲,挂上钩码,移动钩码位置使杠杆在水平位置再次平衡,此时也要选择在水平位置平衡的目的是________________________;
②图甲中,杠杆在水平位置已经平衡,若将杠杆两侧所挂的钩码各取下一个,杠杆会_____ (选填“顺时针”或“逆时针”)转动;
左
可以直接读出力臂
设一个钩码的重力为G,一格的长度为l,将杠杆两侧所挂钩码各取下一个,
左端2G×2l=4Gl,右端G×3l=3Gl,左端力和力臂的乘积大,杠杆逆时针转动。
逆时针
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}次数
动力F1/N
动力臂l1/m
阻力F2/N
阻力臂l2/m
1
1.0
0.2
2.0
0.1
2
1.5
0.1
1.0
0.15
3
2.0
0.15
1.5
0.2
④如图,用弹簧测力计代替右侧钩码,沿与水平方向成60°角斜向下拉杠杆,保持杠杆在水平位置平衡?此时的杠杆是____杠杆(选填“省力”“费力”或“等臂”);请在乙图中画出此时拉力F的力臂l?____
③三次实验数据见下表,分析数据可知,杠杆的平衡条件是______;
F1l1=F2l2
设一格长度为l1,反向延长力F的作用线,从支点O向力F的作用线做垂线段,得到力臂l,如图所示;动力臂 l=3l1×sin60°≈2.6l1
阻力臂 l2=2l1 动力臂大于阻力臂,所以是省力杠杆。
省力
杠杆分类
力臂关系
省费力(距离)情况
应用举例
省力杠杆
费力杠杆
等臂杠杆
省力费距离
省距离费力
不省力也不省距离
撬棍、扳手、钢丝钳
天平、跷跷板
镊子、鱼竿、筷子
l动>l阻
l动<l阻
l动=l阻
三、杠杠的分类
【例题4】如图12所示,一根长为1.2米的轻质杠杆OA可绕固定点O转动,C点处悬挂一重为60牛的物体。(已知AB=BC=CD=DO)
O
C
A
B
D
①在杠杆上施加一个最小的力使杠杆水平平衡,则力臂最大,应该在A点竖直向上。
根据F1L1=F2L2,F2=G=60N F1=F2l2/l1=60N×0.6m/1.2m=30N;
②乙同学的观点正确;当动力与竖直方向的夹角大于60度(或与水平方向的夹角小于30度)时,动力臂小于阻力臂,属于费力杠杆。(合理即可)
①若在该杠杆上施加一个最小的力使杠杆水平平衡,求这个力的大小。
②若在A点施加一个力使杠杆水平平衡,甲同学认为该杠杆一定是省力杠杆,乙同学认为该杠杆可能是费力杠杆。你赞同哪位同学的观点,并说明理由。
30N
【例题5】 如图所示为钓鱼竿钓鱼的示意图,O为支点,画出F1、F2的力臂l1和l2,该杠杆是_______杠杆(选填“省力”或“费力”)。
l2
l1
因为动力臂l1和小于阻力臂l2,所以是费力杠杆。
费力
滑 轮
二
本节
知识点
滑轮组
02
定滑轮和动滑轮
01
轮轴与斜面
滑轮
定滑轮
既能省力,又能改变力的方向
省力费距离,但不能改变
力的方向,实质是省力杠杆
不省力,不费距离,可以改变
力的方向,实质是等臂杠杆
滑轮组
其他简单机械
动滑轮
{2D5ABB26-0587-4C30-8999-92F81FD0307C}?滑轮种类
定滑轮
动滑轮
滑轮组
图示
?
?
?
?
F与G的关系
s与h的关系
特点
定滑轮、动滑轮、滑轮组的比较 (不计绳重、摩擦)
F
G
F=G
s=h
不省力不省距离
能改变力的方向
F=12(G+G动)
?
s=2h
省力、费距离,
不能改变力的方向
F=1????(G+G动)
?
s=nh(n为动滑轮上绳子段数)
省力、费距离,能否改变
力的方向和绕线方式有关?
n=2
n=3
① 定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
② 定滑轮的特点
一、定滑轮
不省力F=G
不省距离S=h
能改变力的方向
定滑轮
F
G
h
s
③定滑轮的实质——等臂杠杆
如图所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。
F=G
F1l1=F2l2
l1=l2=r
Fl1=Gl2
通过理论分析可知,定滑轮实质上
是一个等臂杠杆,所以不省力。
④用平衡力的知识研究定滑轮的特点
在忽略摩擦的情况下,物体受到重力G和拉力F的作用。由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等:
F=G
F
使用定滑轮不省力,可以改变力的方向。
物体向上运动,用力却是往下拉,所以使用定滑轮能改变力的方向.
G
①动滑轮:工作时,轴随着物体移动的滑轮叫动滑轮。
动滑轮
二、动滑轮
若不计动滑轮的重力及摩擦力时,
则拉力:F=G/2
②动滑轮的特点
省力F<G
费距离S绳=2h物
不能改变
力的方向
动滑轮
S绳=2h物
F
G
③动滑轮的实质
动滑轮的实质是一个动力臂为阻力臂二倍的杠杆。
动滑轮相当于一根杠杆,支点在绳和轮相切的A处;拉力F是动力,重物的拉力是阻力G;动力臂l1是轮直径、阻力臂l2是轮半径。
根据杠杆的平衡条件:Fl1=Gl2
l1=2l2 F= G
(不计摩擦和动滑轮重)
1
2
G
④用平衡力的知识研究动滑轮的特点
在忽略动滑轮的重力和摩擦的情况下,物体受到重力G和两段绳子的两个拉力F的作用。由于物体匀速上升,所以两个拉力F跟物体的重力G是平衡力:
若考虑动滑轮的重力,忽略绳重、摩擦的情况下,由于物体匀速上升,所以四个力平衡:
2F=( G + G 动), F=12=(????+????动)
?
F
F
G
G动
2F=G ,F=12????。
?
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}滑轮组
甲
乙
拉力F
拉力(绳子末端)
移动的距离S
三、 滑轮组
如图所示,物体的重力为G,把物体提高h,不计绳重、摩擦及动滑轮自重。所用拉力F大小、拉力移动的距离s如表所示。
F1=12????物
?
F2=13????物
?
s1=2?
?
s2=3?
?
滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之一;绳子末端移动的距离是物体升高距离的几倍。
结论
①轮轴:由具有共同转动轴的大轮和小轮组成。大轮叫轮,小轮叫轴。
根据杠杆的平衡条件:
F1l1 = F2l2
当动力作用在轴上时,轮轴是一个费力杠杆,但省距离。
∵ R >r,∴ FFR = Gr
支点O
R
r
F
F2=G
F1
F2
l2
r
O
l1
R
四、轮轴
②轮轴可以看成一个可连续转动的不等臂杠杆。
轮轴作为杠杆的支点在轴心0,轮半径R是动力臂,轴半径r阻力臂。
当动力作用在轮上时,轮轴是一个省力杠杆,但费距离。
【例题6】如图所示“探究动滑轮的特点”的实验,下列说法正确的是( )
A. 当钩码匀速上升和静止时,弹簧测力计的读数相等
B. 当钩码匀速上升时,弹簧测力计竖直向上拉和斜着向上拉
的读数相等
C. 改变钩码个数,重复实验是为了取平均值减小误差
D. 钩码的重力越大,绳子自由端的拉力越接近钩码重力的1/2
D
①当钩码匀速上升时,轮槽对绳子有摩擦力;当钩码静止时,轮槽对绳子没有摩擦力,因此,钩码匀速上升时弹簧测力计的读数,A错.
②当钩码匀速上升时,弹簧测力计竖直向上拉的读数小于斜着向上拉的读数,B错。③改变钩码个数,重复实验是为了得出普遍结论,C错.
④钩码的重力越大,绳子自由端的拉力越接近钩码重力的1/2,D对。
【例题7】如图甲所示,用滑轮组提升物体,已知滑轮质量均为2kg,物体重 100 N,绳子能承受的最大拉力为 50 N。请画出绳子的正确绕法,并在绳的末端标出力的方向。(不考虑绳重及摩擦,g取10N/kg)
G动=m动g=2kg×10N/kg=20N,
因不考虑绳重及摩擦,故提起动滑轮和物体的绳子的段数n=(G动+G物)/F=(20N+100N)/50N=2.4,
n 应该取3。绕法见乙图。
功
三
本节
知识点
做功了吗
02
什么是功
01
⑤做功的两个必要条件
功
一是对物体要有力的作用,
二是物体在力的方向上通过一定的距离。
W = Fs
物理学中,把力与物体在力的方向上通过的距离的乘积称为机械功,简称功(work)。
③功的公式
①物理学中功的含义
如果一个力作用在物体上,物体在这个在的方向上移动了一段距离,在物理学中就说这个力对物体做了功。
②功的大小
④功的单位 焦耳 1 J=1 N · m
一、物理学中的功
1. 如果一个力作用在物体上,物体在这个在的方向上移动了一段距离,在物理学中就说这个力对物体做了功。
2. 功的大小:
物理学中,把力与物体在力的方向上通过的距离的乘积称为机械功,简称功。
3. 公式:W = Fs
4. 功的单位:焦(J)
1 J=1 N · m
1N的力使物体在力的方向上通过1m的距离时所做的功为1J。
1. 根据W = Fs可知,对物体做功有两个必要条件:一是对物体要有力的作用,二是物体在力的方向上通过一定的距离。
二、做功的两个必要条件
2. 力不做功的三种情况
【例题8】下列生活实例中,力对物体做功的有 ( )
A.甲和乙 B.甲和丙 C.乙和丙 D.丙和丁
甲:小车在推力的作
用下前进了一段距离
乙:提着滑板在
水平路面上前行
丙:物体在拉力
作用下升高
丁:用尽全力搬
石头,搬而未起
甲:小车沿推力方向前进了距离;丙:物体在拉力作用下升高;这两种情况,物体都受到了力,且在这个力的方向上移动了距离,所以力都做功。
乙:提着滑板在水平路面上前行,力的方向与运动方向垂直,力不做功;
丁:用尽全力搬石头,搬而未起,该力不做功。 所以选B。
B
W = Fs
三、力与距离的计算
?????=????????
?
?????=????????
?
已知做功多少W和物体在力的方向上移动的距离s,可求出力F的大小。
已知做功多少W和力的大小F ,可求出物体在力的方向上移动的距离s。
注意:
式中物理量全部用国际单位制。
力F与距离s具有对应性:即距离S是物体沿受力的方向移动的距离,F与s在同一直线上;
F与s具有同体性:即F与s对应同一个物体。
如果物体移动的方向与另一个力的方向相反,我们就说物体克服这个力(阻力)做功。
例如,在水平面上推动物体前进时,要克服摩擦力做功;
人上楼时要克服自己的重力做功。
F推力
f摩擦
F
G重力
人在爬楼梯时,要克服自己的重力做功,计算做功的大小时,应该用人的重力G乘以楼梯的竖直高度h。
W=Gh
要克服摩擦力做功
四、克服阻力做功
同学的重力 G=mg=50kg×10N/kg=500N
所以上楼过程中克服重力所做的功
W=Fs=Gh=500N×12m=6000J
上楼的高度 h=3m×(5-1)=12m
该同学上楼时,要克服自己的重力做功,计算功可以用
W=Gh进行计算。
【例题9】 一位质量约50 kg的同学从一楼走到五楼,他上楼过程中克服重力所做的功可能为( )
A. 60 J B. 600 J
C. 6 000 J D. 10 000 J
C
功 率
四
本节
知识点
估测上楼的功率
02
功率
01
①物理意义:表示物体做功的快慢
国际单位:瓦特 ,符号 W, 1W =1J/1s =1N · m/s
②功率的定义:
③公式:
④单位
⑤推导公式: P=?????????
?
P=????????
?
F:表示作用在物体上的力;
v:表示物体沿力的方向做匀速直线运动的速度。
常用单位:千瓦 ,符号 KW, 1 KW =1000W
功与做功所用时间之比叫做功率,它在数值上等于单位时间所做的功。
功率
1. 比较做功快慢的方法
一个老人和一个小孩一起爬相同的楼梯,做功相同吗?做功的快慢相同吗?
图中两人爬相同的楼梯,两人升高的高度相同,但由于两人的重力不同,根据W=Fs=Gh可知,两人做功不相同,老人比小孩做的功多;
由于两人上楼所用的时间不确定,所以他们做功的快慢可能相同,也可能不相同,无法比较做功的快慢。
时间相同,比较物体做功的多少,做功多的做功快。
做功相同,比较做功的时间,时间短的做功快。
功时间
?
功与时间都不相同,比较 可以比较做功的快慢。
该比值越大,做功越快。
①功率的物理意义:表示物体做功的快慢。
②功率的定义:功与做功所用时间之比叫做功率,它在数值上等于单位时间所做的功。
③公式:
国际单位:焦/秒,符号J/s,叫做瓦特 ,符号 W, 1W=1J/s
常用单位:千瓦(kW)、兆瓦(MW);
1kW=103W,1MW=103kW
④单位:
物体在1 秒内所做的功为1焦,则其功率为1瓦。
2. 功率
⑤功率及其功、时间的计算
t
W
P
=
W=Pt
t=
W
P
W:表示力做的功,单位:焦耳(J)
t: 表示做功所用的时间,单位:秒(s)
P :表示做功的功率,单位:瓦特(W)或焦/秒(J/s)
P =
W
t
=
Fs
t
=
Fv
力F作用在物体上,物体沿力的方向以速度v 做匀速直线运动时,则力F 的功率:
单位:1W=1N · m/s
变形公式:
P=Fv
F=????????
?
v=????????
?
3. 功率的推导式
注意:物体沿力的方向以速度v 做匀速直线运动。
【例题10】为什么汽车上坡时,司机经常用换挡的方法减小速度? 为什么同样一辆机动车,在满载时的行驶速度一般比空载时小得多?
机车发动机的最大功率是一定的。由P=Fv可知,牵引力的大小和运动速度成反比。汽车上坡时,需要增大牵引力,所以要减小速度。
同样一辆机动车,在满载时需要的牵引力增大,则应该减小车辆的速度。
物理量
定义
物理意义
公式
单位
功W
功率P
J(焦)
W(瓦)
W=Fs
P=W/t
功等于力与物体在力的方向上通过的距离的乘积。
功与做功所用时间之比叫做功率。
表示做功
的快慢
表示力
的“成效”
4. 功与功率的区别
5. 估测上楼时的功率
①如果要求估测上楼时功率的大小,需要测量哪些数据?用什么工具测量?
上楼的功率 P=????????=?????????=??????????????,
需要测量:同学质量m、上楼的高度h、上楼所用时间t。
质量m用磅秤测量,高度h用刻度尺测量,时间t用秒表测量.
?
②数据记录表格
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}学生
质量m/kg
高度h/m
时间t/s
功率P/W
甲
乙
丙
……
【例题11】做引体向上的规范动作是两手正握单杠,由悬垂开始。上提时,下颚须超过杠面;下放时,两臂放直,不能曲臂。在动作达到规范要求后,小敏想利用如图所示的引体向上单杠估测自己做引体向上时的功率。请你帮他完成该实验设计。
(1)实验原理: ????。
(2)实验需要测量的物理量及器材: 。
(3)补充实验步骤(物理量用字母符号表示):
①利用电子秤测量出小敏的质量m;
②用刻度尺测量出小敏完成一次规范引体向上动作时______;
③用____测量出小敏连续完成n次规范引体向上动作时需要的_____;
(4)功率计算表达式(用物理量的符号表示) ????。
解析见下页
(1)实验原理: ????。
(2)实验需要测量的物理量及器材: 。
(1)测量引体向上功率的实验原理是:P=W/t
(2)小敏的功率:P=????????=??????????????,该实验需要测量小敏的质量m、上升的高度h和所用时间t;
因此需要的测量仪器为:电子秤、刻度尺和停表;
?
P=W/t
测量的物理量:质量m、高度h和时间t
测量仪器为:电子秤、刻度尺和停表
(3)补充实验步骤(物理量用字母符号表示) :
①利用电子秤测量出小明的质量m;
②用刻度尺测量出小敏完成一次规范引体向上动作时______________;
③用______测量出小敏连续完成n次规范引体向上动作时需要的_______。
(4)功率计算表达式(用物理量的符号表示) ?? ??。
(3)补充实验步骤:
①利用电子秤测量出小敏明的质量m;
②用刻度尺测量出完成一次规范引体向上动作时上升的高度h;
③用停表测量出连续完成n次规范引体向上动作时需要的时间t。
(4)功率计算表达式
P=????????=?????????????????
?
上升的高度h
时间t
停表
P=????????=?????????????????
?
【例题12】如图所示为一辆无人驾驶清扫车,它集激光雷达、摄像头、超声波雷达等传感器于一体,可自主作业。 空车行驶时牵引力的功率为810W,在10s内匀速行驶12m,车受到的阻力为多少牛?
车的速度 ????=????????=12m10s=1.2m/s
?
空车行驶时牵引力的功率??????????=????????=????????????=????????
牵引力 ????=????????=810W1.2m/s=675N
由于车做匀速运动,受到的牵引力和阻力是平衡力,
所以车受到的阻力为 f=F=675N
?
机械效率
五
本节
知识点
机械效率
02
有用功 额外功
01
人们不需要但又不得
不做的功,记为W额外.
总功
有用功与额外功的总和,记为W总.
W总 = W有用 + W额外
定义: 有用功跟总功的比值.
公式:
永远小于1.
有用功
为达到目的必须要做的对人们
有用的功叫做有用功,记为W有用.
额外功
机械效率
动滑轮的
机械效率
减小轮与轴之间的摩擦、减小动滑轮的自重等
增加提起的货物重力
有用功、额外功和总功
机械效率
1. 有用功、总功和额外功
①有用功
将钩码提升一定的高度是我们的目的,所做的功叫做有用功,记为W有用.
②额外功
在使用动滑轮提升钩码时,除需克服摩擦力做功外,还要克服动滑轮的重力做功,这两部分功虽然并非我们所需要的,但又不得不做,叫作额外功,记为W额外.
③总功
手拉绳所做的功叫作总功,记为W总.
②额外功
①有用功
③总功
总功等于有用功与额外功之和
W总= W有+ W额
【例题13】一体重是500 N的同学用重10 N的水桶,提起重为100 N的水沿楼梯送到5 m高的宿舍里使用,完成这一次提水,他做的有用功和额外功分别是( )
A.500 J,50 J B.500 J,2 550 J
C.550 J,2 000 J D.2 550 J,50 J
【解析】
完成一次提水,对水做的功是有用功,W有=G水h=100N×5m=500J
克服自身重及对水桶做的功是额外功,
W额=G额h=(500 N+10 N)×5 m=2 550 J。
故选B。
B
①物理学中,将有用功跟总功的比值叫做机械效率。
注:机械效率只有大小,没有单位。由于有用功总小于总功,所以机械效率总小于1 。机械效率通常用百分数表示。
机械效率是标志机械做功性能好坏的重要指标,机械效率越高,机械的性能越好。
③变形公式:
W有= W总η
W总
=
W有
η
②计算公式:
2. 机械效率
机械效率 η
=
W有
W总
×%
在图中提升物体的过程中,
有用功是Gh,总功是Fs。
F’
s
h G
s
s’
F’是动滑轮对物体的拉力。
在图中平移物体的过程中,
有用功是F’s’,总功是Fs.
④区分有用功和总功.
3. 怎样提高动滑轮的机械效率
第一,是减小额外功。学生通过讨论可以认识到,保持良好的润滑、减小滑轮的轮与轴之间的摩擦、减小动滑轮的自重等方法都能减小额外功,从而提高机械效率。
第二,是增加有用功。当额外功不变时,有用功越大,则机械效率越高。以滑轮组提升重物为例,当动滑轮重和摩擦不变时,提起的货物越重,机械效率越高。
机械效率??????=????有用?????总×%=????有用????有用+????总额外×%
?
①杠杆
??机械效率
????=????有?????总=?????????????
?
其中G为物体的重力,
h为物体升高的高度;
F为动力,S为动力作用点移动的距离。
????总=????????
?
????有用=?????
?
额外功????额:克服杠杆自重及摩擦力做的功。
?
4. 一些简单机械的机械效率
②滑轮或滑轮组竖直提升重物时的机械效率
机械效率???????=????有?????总=?????????????= ????????????
?
其中G为物体的重力,h为物体升高的高度;
n为承担重物的绳子股数,由公式可知:当动滑轮的重力一定时,物重越大,机械效率越高。
不计绳重、摩擦力时,机械效率
????????=????有?????总=??????????+????动?= ????????+????动 = 11+????动????
?
????
?
????
?
③滑轮或滑轮组水平拉动物体(不计滑轮、绳重)
机械效率????=????有?????总=????????物????????绳 =????3????
?
其中f 为物体与水平面的摩擦力, F为拉力, ????绳为绳子自由端移动的距离,????物为物体移动的距离,n为动滑轮上的绳子股数。
?
f
f
机械效率????=????有?????总=????????物????????绳 =????2????
?
机械效率????=????有?????总=????????物????????绳 =??????????
?
????总=????????
?
????有用=?????
?
④斜面
机械效率
????=????有?????总=?????????????
?
其中G为物体的重力,h为斜面的高度,L为斜面的长度。f 为物体与斜面间的摩擦力。
额外功????额:克服斜面与物体之间的摩擦力做的功。
?
【例题14】工人用如图所示的滑轮组提升建材;工人的重力是700N。他将540N的建材匀速提升了3m,滑轮组的机械效率是90%。试求:
(1)提升建材所做的有用功;
(2)不计摩擦与绳的质量,求动滑轮质量。
(1)W有=Gh=540N×3m=1620J
(2)????总=????有?????=1620J60% = 1800J
?
W额= W总-W有
= 1800J + 1620J =180J
W额=G动h
????动=????额??=180J3m = 60N
?
m动=????动????=60N10N/kg=6kg
?
【例题15】如图6所示,在斜面上将一个重为15 N的物体匀速从斜面底端拉到顶端,沿斜面向上的拉力F=6 N,斜面长s=1.2 m、斜面高h=0.3 m。下列说法正确的是( )
A. 克服物体重力做功:W有=Gh=15 N×0.3m=4.5J,故A错误;
B. 拉力做的总功:W总=Fs=6 N×1.2 m=7.2 J,
则额外功:W额=W总-W有=7.2 J-4.5 J=2.7 J,故B错误;
C. 物体受到的摩擦力:f=W额/s=2.7J/1.2m=2.25 N,故C正确;
D. 斜面的机械效率:η=W有/W总= 4.5J/7.2J =62.5%,故D错误。故选C。
A.克服物体重力做功7.2 J B.额外功为1.8 J
C.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
C
【例题16】用相同的两个滑轮按如图两种方式组装,将重为G的重物(物重大于滑轮重)在相同的时间内匀速竖直提升相同的高度h,则拉力大小关系:F1_____F2,拉力做功大小关系:W1_____W2,绳子自由端移动的速度关系:v1____v2,两滑轮的机械效率关系:η1____η2。(均选填“>”、“<”或“=”)(不计绳重及摩擦)
甲是动滑轮,乙是定滑轮,不计绳重及摩擦,则
F1= 12(????+????动),F2=G,因为 ????>????动,所以F1< F2。
做功大小:W1=????+????动? W2=?????,所以 W1>W2。
因时间t、高度h相等,S1=2h,S2=h,故绳子末端移动的速度:v1>v2。有用功相等,甲做的额外功多,根据 ????=????有?????总,所以甲机械效率低。
?
F2
F1
甲 乙
<
>
>
<
【例题17】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:
(1)人的拉力做的功为多少焦?
(2)此滑轮组的机械效率为多少?
(3)若用此滑轮组提升重为1500N的物体,拉力F是多大?
(1)由图知n=2,拉力端移动的距离s=2h=2×0.5 m=1 m
拉力做的总功W总=Fs=600 N×1 m=600 J.
(2)工人做的有用功W有=Gh=900 N×0.5 m=450 J
滑轮组的机械效率????=????有?????总=450J?600J?==75%.
?
【例题17】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:
(3)若用此滑轮组提升重为1500N的物体,拉力F是多大?
(3)由于不计摩擦和绳重,拉力F= 12(G物+G动)
所用动滑轮的重G动=2F-G=2×600 N-900 N=300 N
若用此滑轮组将1 500 N的重物,
此时拉力F′= 12(G物′+G动)=(1 500 N+300 N)=900 N.
江苏科学技术出版社
简单机械和功
九年级物理上册
从我们吃饭用的筷子,
到航天器使用的机械臂。
机械已深入到人类生活的方方面面,
无论多么复杂的机械都是由简单机械组成的。
我们在叹服于机械的神奇和人类伟大智慧的同时,
不禁产生许多遐想………
这些机械是依据什么原理工作的呢?
延伸人体的“神臂”
单元复习
①因ppt使用的视频质量高,故资源比较大(本ppt约56MB)。
②所用视频资源已全部内嵌在ppt中,不需另外下载。
③本节ppt共有75张,含有4个视频,可根据需要选择播放。
④本课件使用PowerPoint制作,建议使用PowerPoint播放。
⑤本ppt画面比例为 宽屏16:9。
①课堂总结——《杠杆》
②课堂总结——《功》
③课堂总结——《功率》
④课堂总结——《机械效率》
视频资源清单
一、杠杆
二、 滑轮
三、 功
四、功率
第十一章
简单机械和功
五、机械效率
杠 杆
一
本节
知识点
杠杆的平衡条件
02
什么是杠杆
01
生活中的杠杆
03
在力的作用下能绕固定点转动的硬棒
支点0:杠杆绕着转动的固定点
动力F1:使杠杆转动的力(人施加的力)
阻力F2:阻碍杠杆转动的力(物体施加的力)
动力臂l1:从支点到动力作用线的距离
阻力臂l2:从支点到阻力作用线的距离
平衡:杠杆在动力和阻力作用下保持静止或或匀速转动
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
省力杠杆:L1>l2
省力,但费距离
F1
省距离,但费力
等臂杠杆:l1=l2
F1=F2
不省力,也不费距离
杠杆定义
五要素
杠杆平衡
杠杆分类
杠杆
一、杠杆
1. 在力的作用下可绕一固定点转动的硬棒称为杠杆。
2.杠杆“五要素”
①支 点:杠杆绕着转动的点O;
②动 力:使杠杆转动的力F1 ;
③阻 力:阻碍杠杆转动的力F2 ;
④动力臂:从支点到动力作用线的距离l1 ;
⑤阻力臂:从支点到阻力作用线的距离l2 。
F2
F1
l2
人用撬棒翘起物体
3. 动力、阻力都是杠杆受的力,所以作用点在杠杆上。动力、阻力的方向不一定相反,但它们使杠杆转动的方向相反。
4. 力臂的画法
从支点O向力的作用线引垂线,画出
垂足,则从支点到垂线的距离就是力臂。
过力的作用点沿力的方向画出力的作用线。
注意:必要时要用虚线将力的作用线延长。
先确定杠杆的支点O和动力、阻力的方向。
最后用大括号或箭头勾出力臂,
并在旁边写上字母l1或l2。
阻力F2
动力F1
力的作用线
力的作用线
阻力臂l2
支点O
动力臂l1
【例题1】如图开瓶器开启瓶盖时可抽象为一杠杆,不计自重。选项图能正确表示它工作示意图的是( )
由题图知,向上用力时,起子围绕左端O转动,因此O为支点。又因为动力F1的方向向上,使杠杆沿逆时针转动,所以阻力F2的方向向下,使杠杆沿顺时针转动。故选B。
???B
二、杠杆的平衡条件(杠杆原理)
1. 杠杆平衡时:动力×动力臂=阻力×阻力臂
公式: F1 L1=F2 L2
分析杠杆平衡时动力最小问题:
阻力×阻力臂不变时,要使动力F1最小,必须使动力臂L1最大,要使动力臂最大需要做到:
①在杠杆上找一点,使这点到支点的距离最远;
②连接支点与动力作用点,得到最长的线段;
③经过动力作用点做出与该线段垂直的直线;
④根据杠杆平衡原理,确定使杠杆平衡的动力方向。
【例题2】如图所示,O为杠杆的支点,在A点挂一重物,图中力F1、F2、F3、F4能使杠杆在水平位置平衡的最小拉力是 ( )
A.F1 B.F2 C.F3 D.F4
由图可知,O为支点,A点挂重物,阻力F2方向竖直向下,F2及阻力臂L2的大小都不变;为使杠杆在水平位置平衡,由杠杆平衡条件F1L1=F2L2可知,当动力臂L1最大时,拉力最小;
动力F1的方向竖直向上,力臂是三个单位,该力臂最大,所以力最小。
力F3与F4的方向竖直向上,不能使杠杆在水平位置平衡(与阻力的转动效果相同),所以排除掉。 综合以上分析,选项A正确。
A
① 杠杆的平衡状态:静止或匀速转动。
②杠杆水平平衡的调节:实验前通过调节平衡螺母实现水平平衡,左高向左调,右高向右调。
实验过程中不能调节平衡螺母,应该调节钩码的位置使杠杆在水平位置平衡。
③ 实验前调节杠杆处于水平位置平衡的目的:
便于直接读出力臂。
④支点处于杠杆中央的目的:
避免杠杆自重对实验结果产生影响。
2. 实验——探究杠杆的平衡条件
【设计实验】
不能调节
平衡螺母
调节平衡螺母
⑤进行多次实验的目的:
减小偶然性对实验结果的影响,使实验结论具有普遍性。
①将一端的钩码换成弹簧测力计的好处是:可直接读出力的大小。
②弹簧测力计从竖直拉杠杆变成倾斜拉杠杆时,测力计的示数:
将变大 (拉力力臂变小,弹簧测力计示数变大)。
【分析数据,总结结论】
【交流与反思】
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
【例题3】利用图中的装置探究杠杆平衡的条件,每个钩码的质量相等,杠杆上的刻度均匀?
①当不挂钩码时,出现杠杆右端下沉,应向_____(选填“左”或“右”)调节平衡螺母,直至杠杆在水平位置平衡;如图甲,挂上钩码,移动钩码位置使杠杆在水平位置再次平衡,此时也要选择在水平位置平衡的目的是________________________;
②图甲中,杠杆在水平位置已经平衡,若将杠杆两侧所挂的钩码各取下一个,杠杆会_____ (选填“顺时针”或“逆时针”)转动;
左
可以直接读出力臂
设一个钩码的重力为G,一格的长度为l,将杠杆两侧所挂钩码各取下一个,
左端2G×2l=4Gl,右端G×3l=3Gl,左端力和力臂的乘积大,杠杆逆时针转动。
逆时针
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}次数
动力F1/N
动力臂l1/m
阻力F2/N
阻力臂l2/m
1
1.0
0.2
2.0
0.1
2
1.5
0.1
1.0
0.15
3
2.0
0.15
1.5
0.2
④如图,用弹簧测力计代替右侧钩码,沿与水平方向成60°角斜向下拉杠杆,保持杠杆在水平位置平衡?此时的杠杆是____杠杆(选填“省力”“费力”或“等臂”);请在乙图中画出此时拉力F的力臂l?____
③三次实验数据见下表,分析数据可知,杠杆的平衡条件是______;
F1l1=F2l2
设一格长度为l1,反向延长力F的作用线,从支点O向力F的作用线做垂线段,得到力臂l,如图所示;动力臂 l=3l1×sin60°≈2.6l1
阻力臂 l2=2l1 动力臂大于阻力臂,所以是省力杠杆。
省力
杠杆分类
力臂关系
省费力(距离)情况
应用举例
省力杠杆
费力杠杆
等臂杠杆
省力费距离
省距离费力
不省力也不省距离
撬棍、扳手、钢丝钳
天平、跷跷板
镊子、鱼竿、筷子
l动>l阻
l动<l阻
l动=l阻
三、杠杠的分类
【例题4】如图12所示,一根长为1.2米的轻质杠杆OA可绕固定点O转动,C点处悬挂一重为60牛的物体。(已知AB=BC=CD=DO)
O
C
A
B
D
①在杠杆上施加一个最小的力使杠杆水平平衡,则力臂最大,应该在A点竖直向上。
根据F1L1=F2L2,F2=G=60N F1=F2l2/l1=60N×0.6m/1.2m=30N;
②乙同学的观点正确;当动力与竖直方向的夹角大于60度(或与水平方向的夹角小于30度)时,动力臂小于阻力臂,属于费力杠杆。(合理即可)
①若在该杠杆上施加一个最小的力使杠杆水平平衡,求这个力的大小。
②若在A点施加一个力使杠杆水平平衡,甲同学认为该杠杆一定是省力杠杆,乙同学认为该杠杆可能是费力杠杆。你赞同哪位同学的观点,并说明理由。
30N
【例题5】 如图所示为钓鱼竿钓鱼的示意图,O为支点,画出F1、F2的力臂l1和l2,该杠杆是_______杠杆(选填“省力”或“费力”)。
l2
l1
因为动力臂l1和小于阻力臂l2,所以是费力杠杆。
费力
滑 轮
二
本节
知识点
滑轮组
02
定滑轮和动滑轮
01
轮轴与斜面
滑轮
定滑轮
既能省力,又能改变力的方向
省力费距离,但不能改变
力的方向,实质是省力杠杆
不省力,不费距离,可以改变
力的方向,实质是等臂杠杆
滑轮组
其他简单机械
动滑轮
{2D5ABB26-0587-4C30-8999-92F81FD0307C}?滑轮种类
定滑轮
动滑轮
滑轮组
图示
?
?
?
?
F与G的关系
s与h的关系
特点
定滑轮、动滑轮、滑轮组的比较 (不计绳重、摩擦)
F
G
F=G
s=h
不省力不省距离
能改变力的方向
F=12(G+G动)
?
s=2h
省力、费距离,
不能改变力的方向
F=1????(G+G动)
?
s=nh(n为动滑轮上绳子段数)
省力、费距离,能否改变
力的方向和绕线方式有关?
n=2
n=3
① 定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
② 定滑轮的特点
一、定滑轮
不省力F=G
不省距离S=h
能改变力的方向
定滑轮
F
G
h
s
③定滑轮的实质——等臂杠杆
如图所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。
F=G
F1l1=F2l2
l1=l2=r
Fl1=Gl2
通过理论分析可知,定滑轮实质上
是一个等臂杠杆,所以不省力。
④用平衡力的知识研究定滑轮的特点
在忽略摩擦的情况下,物体受到重力G和拉力F的作用。由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等:
F=G
F
使用定滑轮不省力,可以改变力的方向。
物体向上运动,用力却是往下拉,所以使用定滑轮能改变力的方向.
G
①动滑轮:工作时,轴随着物体移动的滑轮叫动滑轮。
动滑轮
二、动滑轮
若不计动滑轮的重力及摩擦力时,
则拉力:F=G/2
②动滑轮的特点
省力F<G
费距离S绳=2h物
不能改变
力的方向
动滑轮
S绳=2h物
F
G
③动滑轮的实质
动滑轮的实质是一个动力臂为阻力臂二倍的杠杆。
动滑轮相当于一根杠杆,支点在绳和轮相切的A处;拉力F是动力,重物的拉力是阻力G;动力臂l1是轮直径、阻力臂l2是轮半径。
根据杠杆的平衡条件:Fl1=Gl2
l1=2l2 F= G
(不计摩擦和动滑轮重)
1
2
G
④用平衡力的知识研究动滑轮的特点
在忽略动滑轮的重力和摩擦的情况下,物体受到重力G和两段绳子的两个拉力F的作用。由于物体匀速上升,所以两个拉力F跟物体的重力G是平衡力:
若考虑动滑轮的重力,忽略绳重、摩擦的情况下,由于物体匀速上升,所以四个力平衡:
2F=( G + G 动), F=12=(????+????动)
?
F
F
G
G动
2F=G ,F=12????。
?
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}滑轮组
甲
乙
拉力F
拉力(绳子末端)
移动的距离S
三、 滑轮组
如图所示,物体的重力为G,把物体提高h,不计绳重、摩擦及动滑轮自重。所用拉力F大小、拉力移动的距离s如表所示。
F1=12????物
?
F2=13????物
?
s1=2?
?
s2=3?
?
滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之一;绳子末端移动的距离是物体升高距离的几倍。
结论
①轮轴:由具有共同转动轴的大轮和小轮组成。大轮叫轮,小轮叫轴。
根据杠杆的平衡条件:
F1l1 = F2l2
当动力作用在轴上时,轮轴是一个费力杠杆,但省距离。
∵ R >r,∴ F
支点O
R
r
F
F2=G
F1
F2
l2
r
O
l1
R
四、轮轴
②轮轴可以看成一个可连续转动的不等臂杠杆。
轮轴作为杠杆的支点在轴心0,轮半径R是动力臂,轴半径r阻力臂。
当动力作用在轮上时,轮轴是一个省力杠杆,但费距离。
【例题6】如图所示“探究动滑轮的特点”的实验,下列说法正确的是( )
A. 当钩码匀速上升和静止时,弹簧测力计的读数相等
B. 当钩码匀速上升时,弹簧测力计竖直向上拉和斜着向上拉
的读数相等
C. 改变钩码个数,重复实验是为了取平均值减小误差
D. 钩码的重力越大,绳子自由端的拉力越接近钩码重力的1/2
D
①当钩码匀速上升时,轮槽对绳子有摩擦力;当钩码静止时,轮槽对绳子没有摩擦力,因此,钩码匀速上升时弹簧测力计的读数,A错.
②当钩码匀速上升时,弹簧测力计竖直向上拉的读数小于斜着向上拉的读数,B错。③改变钩码个数,重复实验是为了得出普遍结论,C错.
④钩码的重力越大,绳子自由端的拉力越接近钩码重力的1/2,D对。
【例题7】如图甲所示,用滑轮组提升物体,已知滑轮质量均为2kg,物体重 100 N,绳子能承受的最大拉力为 50 N。请画出绳子的正确绕法,并在绳的末端标出力的方向。(不考虑绳重及摩擦,g取10N/kg)
G动=m动g=2kg×10N/kg=20N,
因不考虑绳重及摩擦,故提起动滑轮和物体的绳子的段数n=(G动+G物)/F=(20N+100N)/50N=2.4,
n 应该取3。绕法见乙图。
功
三
本节
知识点
做功了吗
02
什么是功
01
⑤做功的两个必要条件
功
一是对物体要有力的作用,
二是物体在力的方向上通过一定的距离。
W = Fs
物理学中,把力与物体在力的方向上通过的距离的乘积称为机械功,简称功(work)。
③功的公式
①物理学中功的含义
如果一个力作用在物体上,物体在这个在的方向上移动了一段距离,在物理学中就说这个力对物体做了功。
②功的大小
④功的单位 焦耳 1 J=1 N · m
一、物理学中的功
1. 如果一个力作用在物体上,物体在这个在的方向上移动了一段距离,在物理学中就说这个力对物体做了功。
2. 功的大小:
物理学中,把力与物体在力的方向上通过的距离的乘积称为机械功,简称功。
3. 公式:W = Fs
4. 功的单位:焦(J)
1 J=1 N · m
1N的力使物体在力的方向上通过1m的距离时所做的功为1J。
1. 根据W = Fs可知,对物体做功有两个必要条件:一是对物体要有力的作用,二是物体在力的方向上通过一定的距离。
二、做功的两个必要条件
2. 力不做功的三种情况
【例题8】下列生活实例中,力对物体做功的有 ( )
A.甲和乙 B.甲和丙 C.乙和丙 D.丙和丁
甲:小车在推力的作
用下前进了一段距离
乙:提着滑板在
水平路面上前行
丙:物体在拉力
作用下升高
丁:用尽全力搬
石头,搬而未起
甲:小车沿推力方向前进了距离;丙:物体在拉力作用下升高;这两种情况,物体都受到了力,且在这个力的方向上移动了距离,所以力都做功。
乙:提着滑板在水平路面上前行,力的方向与运动方向垂直,力不做功;
丁:用尽全力搬石头,搬而未起,该力不做功。 所以选B。
B
W = Fs
三、力与距离的计算
?????=????????
?
?????=????????
?
已知做功多少W和物体在力的方向上移动的距离s,可求出力F的大小。
已知做功多少W和力的大小F ,可求出物体在力的方向上移动的距离s。
注意:
式中物理量全部用国际单位制。
力F与距离s具有对应性:即距离S是物体沿受力的方向移动的距离,F与s在同一直线上;
F与s具有同体性:即F与s对应同一个物体。
如果物体移动的方向与另一个力的方向相反,我们就说物体克服这个力(阻力)做功。
例如,在水平面上推动物体前进时,要克服摩擦力做功;
人上楼时要克服自己的重力做功。
F推力
f摩擦
F
G重力
人在爬楼梯时,要克服自己的重力做功,计算做功的大小时,应该用人的重力G乘以楼梯的竖直高度h。
W=Gh
要克服摩擦力做功
四、克服阻力做功
同学的重力 G=mg=50kg×10N/kg=500N
所以上楼过程中克服重力所做的功
W=Fs=Gh=500N×12m=6000J
上楼的高度 h=3m×(5-1)=12m
该同学上楼时,要克服自己的重力做功,计算功可以用
W=Gh进行计算。
【例题9】 一位质量约50 kg的同学从一楼走到五楼,他上楼过程中克服重力所做的功可能为( )
A. 60 J B. 600 J
C. 6 000 J D. 10 000 J
C
功 率
四
本节
知识点
估测上楼的功率
02
功率
01
①物理意义:表示物体做功的快慢
国际单位:瓦特 ,符号 W, 1W =1J/1s =1N · m/s
②功率的定义:
③公式:
④单位
⑤推导公式: P=?????????
?
P=????????
?
F:表示作用在物体上的力;
v:表示物体沿力的方向做匀速直线运动的速度。
常用单位:千瓦 ,符号 KW, 1 KW =1000W
功与做功所用时间之比叫做功率,它在数值上等于单位时间所做的功。
功率
1. 比较做功快慢的方法
一个老人和一个小孩一起爬相同的楼梯,做功相同吗?做功的快慢相同吗?
图中两人爬相同的楼梯,两人升高的高度相同,但由于两人的重力不同,根据W=Fs=Gh可知,两人做功不相同,老人比小孩做的功多;
由于两人上楼所用的时间不确定,所以他们做功的快慢可能相同,也可能不相同,无法比较做功的快慢。
时间相同,比较物体做功的多少,做功多的做功快。
做功相同,比较做功的时间,时间短的做功快。
功时间
?
功与时间都不相同,比较 可以比较做功的快慢。
该比值越大,做功越快。
①功率的物理意义:表示物体做功的快慢。
②功率的定义:功与做功所用时间之比叫做功率,它在数值上等于单位时间所做的功。
③公式:
国际单位:焦/秒,符号J/s,叫做瓦特 ,符号 W, 1W=1J/s
常用单位:千瓦(kW)、兆瓦(MW);
1kW=103W,1MW=103kW
④单位:
物体在1 秒内所做的功为1焦,则其功率为1瓦。
2. 功率
⑤功率及其功、时间的计算
t
W
P
=
W=Pt
t=
W
P
W:表示力做的功,单位:焦耳(J)
t: 表示做功所用的时间,单位:秒(s)
P :表示做功的功率,单位:瓦特(W)或焦/秒(J/s)
P =
W
t
=
Fs
t
=
Fv
力F作用在物体上,物体沿力的方向以速度v 做匀速直线运动时,则力F 的功率:
单位:1W=1N · m/s
变形公式:
P=Fv
F=????????
?
v=????????
?
3. 功率的推导式
注意:物体沿力的方向以速度v 做匀速直线运动。
【例题10】为什么汽车上坡时,司机经常用换挡的方法减小速度? 为什么同样一辆机动车,在满载时的行驶速度一般比空载时小得多?
机车发动机的最大功率是一定的。由P=Fv可知,牵引力的大小和运动速度成反比。汽车上坡时,需要增大牵引力,所以要减小速度。
同样一辆机动车,在满载时需要的牵引力增大,则应该减小车辆的速度。
物理量
定义
物理意义
公式
单位
功W
功率P
J(焦)
W(瓦)
W=Fs
P=W/t
功等于力与物体在力的方向上通过的距离的乘积。
功与做功所用时间之比叫做功率。
表示做功
的快慢
表示力
的“成效”
4. 功与功率的区别
5. 估测上楼时的功率
①如果要求估测上楼时功率的大小,需要测量哪些数据?用什么工具测量?
上楼的功率 P=????????=?????????=??????????????,
需要测量:同学质量m、上楼的高度h、上楼所用时间t。
质量m用磅秤测量,高度h用刻度尺测量,时间t用秒表测量.
?
②数据记录表格
{5C22544A-7EE6-4342-B048-85BDC9FD1C3A}学生
质量m/kg
高度h/m
时间t/s
功率P/W
甲
乙
丙
……
【例题11】做引体向上的规范动作是两手正握单杠,由悬垂开始。上提时,下颚须超过杠面;下放时,两臂放直,不能曲臂。在动作达到规范要求后,小敏想利用如图所示的引体向上单杠估测自己做引体向上时的功率。请你帮他完成该实验设计。
(1)实验原理: ????。
(2)实验需要测量的物理量及器材: 。
(3)补充实验步骤(物理量用字母符号表示):
①利用电子秤测量出小敏的质量m;
②用刻度尺测量出小敏完成一次规范引体向上动作时______;
③用____测量出小敏连续完成n次规范引体向上动作时需要的_____;
(4)功率计算表达式(用物理量的符号表示) ????。
解析见下页
(1)实验原理: ????。
(2)实验需要测量的物理量及器材: 。
(1)测量引体向上功率的实验原理是:P=W/t
(2)小敏的功率:P=????????=??????????????,该实验需要测量小敏的质量m、上升的高度h和所用时间t;
因此需要的测量仪器为:电子秤、刻度尺和停表;
?
P=W/t
测量的物理量:质量m、高度h和时间t
测量仪器为:电子秤、刻度尺和停表
(3)补充实验步骤(物理量用字母符号表示) :
①利用电子秤测量出小明的质量m;
②用刻度尺测量出小敏完成一次规范引体向上动作时______________;
③用______测量出小敏连续完成n次规范引体向上动作时需要的_______。
(4)功率计算表达式(用物理量的符号表示) ?? ??。
(3)补充实验步骤:
①利用电子秤测量出小敏明的质量m;
②用刻度尺测量出完成一次规范引体向上动作时上升的高度h;
③用停表测量出连续完成n次规范引体向上动作时需要的时间t。
(4)功率计算表达式
P=????????=?????????????????
?
上升的高度h
时间t
停表
P=????????=?????????????????
?
【例题12】如图所示为一辆无人驾驶清扫车,它集激光雷达、摄像头、超声波雷达等传感器于一体,可自主作业。 空车行驶时牵引力的功率为810W,在10s内匀速行驶12m,车受到的阻力为多少牛?
车的速度 ????=????????=12m10s=1.2m/s
?
空车行驶时牵引力的功率??????????=????????=????????????=????????
牵引力 ????=????????=810W1.2m/s=675N
由于车做匀速运动,受到的牵引力和阻力是平衡力,
所以车受到的阻力为 f=F=675N
?
机械效率
五
本节
知识点
机械效率
02
有用功 额外功
01
人们不需要但又不得
不做的功,记为W额外.
总功
有用功与额外功的总和,记为W总.
W总 = W有用 + W额外
定义: 有用功跟总功的比值.
公式:
永远小于1.
有用功
为达到目的必须要做的对人们
有用的功叫做有用功,记为W有用.
额外功
机械效率
动滑轮的
机械效率
减小轮与轴之间的摩擦、减小动滑轮的自重等
增加提起的货物重力
有用功、额外功和总功
机械效率
1. 有用功、总功和额外功
①有用功
将钩码提升一定的高度是我们的目的,所做的功叫做有用功,记为W有用.
②额外功
在使用动滑轮提升钩码时,除需克服摩擦力做功外,还要克服动滑轮的重力做功,这两部分功虽然并非我们所需要的,但又不得不做,叫作额外功,记为W额外.
③总功
手拉绳所做的功叫作总功,记为W总.
②额外功
①有用功
③总功
总功等于有用功与额外功之和
W总= W有+ W额
【例题13】一体重是500 N的同学用重10 N的水桶,提起重为100 N的水沿楼梯送到5 m高的宿舍里使用,完成这一次提水,他做的有用功和额外功分别是( )
A.500 J,50 J B.500 J,2 550 J
C.550 J,2 000 J D.2 550 J,50 J
【解析】
完成一次提水,对水做的功是有用功,W有=G水h=100N×5m=500J
克服自身重及对水桶做的功是额外功,
W额=G额h=(500 N+10 N)×5 m=2 550 J。
故选B。
B
①物理学中,将有用功跟总功的比值叫做机械效率。
注:机械效率只有大小,没有单位。由于有用功总小于总功,所以机械效率总小于1 。机械效率通常用百分数表示。
机械效率是标志机械做功性能好坏的重要指标,机械效率越高,机械的性能越好。
③变形公式:
W有= W总η
W总
=
W有
η
②计算公式:
2. 机械效率
机械效率 η
=
W有
W总
×%
在图中提升物体的过程中,
有用功是Gh,总功是Fs。
F’
s
h G
s
s’
F’是动滑轮对物体的拉力。
在图中平移物体的过程中,
有用功是F’s’,总功是Fs.
④区分有用功和总功.
3. 怎样提高动滑轮的机械效率
第一,是减小额外功。学生通过讨论可以认识到,保持良好的润滑、减小滑轮的轮与轴之间的摩擦、减小动滑轮的自重等方法都能减小额外功,从而提高机械效率。
第二,是增加有用功。当额外功不变时,有用功越大,则机械效率越高。以滑轮组提升重物为例,当动滑轮重和摩擦不变时,提起的货物越重,机械效率越高。
机械效率??????=????有用?????总×%=????有用????有用+????总额外×%
?
①杠杆
??机械效率
????=????有?????总=?????????????
?
其中G为物体的重力,
h为物体升高的高度;
F为动力,S为动力作用点移动的距离。
????总=????????
?
????有用=?????
?
额外功????额:克服杠杆自重及摩擦力做的功。
?
4. 一些简单机械的机械效率
②滑轮或滑轮组竖直提升重物时的机械效率
机械效率???????=????有?????总=?????????????= ????????????
?
其中G为物体的重力,h为物体升高的高度;
n为承担重物的绳子股数,由公式可知:当动滑轮的重力一定时,物重越大,机械效率越高。
不计绳重、摩擦力时,机械效率
????????=????有?????总=??????????+????动?= ????????+????动 = 11+????动????
?
????
?
????
?
③滑轮或滑轮组水平拉动物体(不计滑轮、绳重)
机械效率????=????有?????总=????????物????????绳 =????3????
?
其中f 为物体与水平面的摩擦力, F为拉力, ????绳为绳子自由端移动的距离,????物为物体移动的距离,n为动滑轮上的绳子股数。
?
f
f
机械效率????=????有?????总=????????物????????绳 =????2????
?
机械效率????=????有?????总=????????物????????绳 =??????????
?
????总=????????
?
????有用=?????
?
④斜面
机械效率
????=????有?????总=?????????????
?
其中G为物体的重力,h为斜面的高度,L为斜面的长度。f 为物体与斜面间的摩擦力。
额外功????额:克服斜面与物体之间的摩擦力做的功。
?
【例题14】工人用如图所示的滑轮组提升建材;工人的重力是700N。他将540N的建材匀速提升了3m,滑轮组的机械效率是90%。试求:
(1)提升建材所做的有用功;
(2)不计摩擦与绳的质量,求动滑轮质量。
(1)W有=Gh=540N×3m=1620J
(2)????总=????有?????=1620J60% = 1800J
?
W额= W总-W有
= 1800J + 1620J =180J
W额=G动h
????动=????额??=180J3m = 60N
?
m动=????动????=60N10N/kg=6kg
?
【例题15】如图6所示,在斜面上将一个重为15 N的物体匀速从斜面底端拉到顶端,沿斜面向上的拉力F=6 N,斜面长s=1.2 m、斜面高h=0.3 m。下列说法正确的是( )
A. 克服物体重力做功:W有=Gh=15 N×0.3m=4.5J,故A错误;
B. 拉力做的总功:W总=Fs=6 N×1.2 m=7.2 J,
则额外功:W额=W总-W有=7.2 J-4.5 J=2.7 J,故B错误;
C. 物体受到的摩擦力:f=W额/s=2.7J/1.2m=2.25 N,故C正确;
D. 斜面的机械效率:η=W有/W总= 4.5J/7.2J =62.5%,故D错误。故选C。
A.克服物体重力做功7.2 J B.额外功为1.8 J
C.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
C
【例题16】用相同的两个滑轮按如图两种方式组装,将重为G的重物(物重大于滑轮重)在相同的时间内匀速竖直提升相同的高度h,则拉力大小关系:F1_____F2,拉力做功大小关系:W1_____W2,绳子自由端移动的速度关系:v1____v2,两滑轮的机械效率关系:η1____η2。(均选填“>”、“<”或“=”)(不计绳重及摩擦)
甲是动滑轮,乙是定滑轮,不计绳重及摩擦,则
F1= 12(????+????动),F2=G,因为 ????>????动,所以F1< F2。
做功大小:W1=????+????动? W2=?????,所以 W1>W2。
因时间t、高度h相等,S1=2h,S2=h,故绳子末端移动的速度:v1>v2。有用功相等,甲做的额外功多,根据 ????=????有?????总,所以甲机械效率低。
?
F2
F1
甲 乙
<
>
>
<
【例题17】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:
(1)人的拉力做的功为多少焦?
(2)此滑轮组的机械效率为多少?
(3)若用此滑轮组提升重为1500N的物体,拉力F是多大?
(1)由图知n=2,拉力端移动的距离s=2h=2×0.5 m=1 m
拉力做的总功W总=Fs=600 N×1 m=600 J.
(2)工人做的有用功W有=Gh=900 N×0.5 m=450 J
滑轮组的机械效率????=????有?????总=450J?600J?==75%.
?
【例题17】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:
(3)若用此滑轮组提升重为1500N的物体,拉力F是多大?
(3)由于不计摩擦和绳重,拉力F= 12(G物+G动)
所用动滑轮的重G动=2F-G=2×600 N-900 N=300 N
若用此滑轮组将1 500 N的重物,
此时拉力F′= 12(G物′+G动)=(1 500 N+300 N)=900 N.
同课章节目录
- 第十一章 简单机械和功
- 1 杠杆
- 2 滑轮
- 3 功
- 4 功率
- 5 机械效率
- 第十二章 机械能和内能
- 1 动能 势能 机械能
- 2 内能 热传递
- 3 物质的比热容
- 4 机械能和内能的相互转化
- 第十三章 电路初探
- 1 初识家用电器和电路
- 2 电路连接的基本方式
- 3 电流和电流表的使用
- 4 电压和电压表的使用
- 第十四章 欧姆定律
- 1 电阻
- 2 变阻器
- 3 欧姆定律
- 4 欧姆定律的应用
- 第十五章 电功和电热
- 电能表与电功
- 电功率
- 电热器 电流的热效应
- 家庭电路与安全用电
- 第十六章 电磁转换
- 磁体与磁场
- 电流的磁场
- 磁场对电流的作用 电动机
- 安装直流电动机模型
- 电磁感应 发电机
- 第十七章 电磁波与现代通信
- 信息与信息传播
- 电磁波及其传播
- 现代通信 走进信息时代
- 第十八章 能源与可持续发展
- 能源利用与社会发展
- 核能
- 太阳能
- 能量转化的基本规律
- 能源与可持续发展