9.1 杠杆 课件(2024 新课标)(共56张PPT)
文档属性
| 名称 | 9.1 杠杆 课件(2024 新课标)(共56张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 5.6MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-05-13 00:00:00 | ||
图片预览





文档简介
(共56张PPT)
9.1 杠杆
北师大版 八年级物理下册
制作 高文超
教学目标
1.物理观念:
(1)能识别出杠杆,并能准确找出支点、动力、阻力、动力臂、阻力臂。
(2)知道杠杆的平衡条件,并能利用杠杆的平衡条件进行相关的计算。
(3)能对杠杆进行分类,并能根据实际需要选择合适的杠杆。
2.科学思维:
通过对杠杆的研究,让学生逐步学会透过现象认识事物本质的方法,培养学生观察能力和用科学的方法解决问题的能力。
教学目标
3.科学探究:
通过实验探究,得出杠杆的平衡条件。
4.科学态度与责任:
(1)从生活中的实例,建立杠杆模型的过程,了解物理学中研究问题的方法。
(2)通过探究杠杆的平衡条件,使学生勇于并乐于参与科学探究,增进交流与合作的意识,加强学生之间的相互协作精神。
(3)通过杠杆分类及应用的学习,感受物理与生活的联系,领会物理知识的应用价值。
教学目标
教学重点
探究杠杆的平衡条件。
教学难点
杠杆示意图中动力臂和阻力臂的画法。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知讲解
一、杠杆
杠杆是一种常见的简单的机械。
新知讲解
一、杠杆
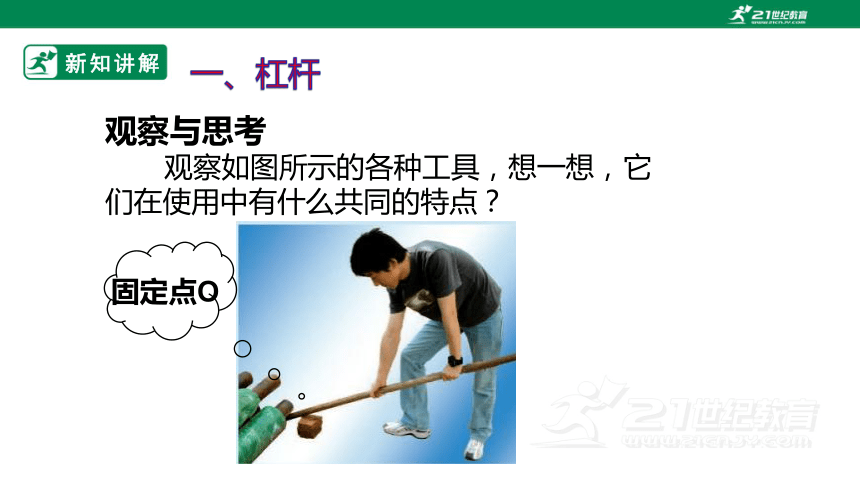
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
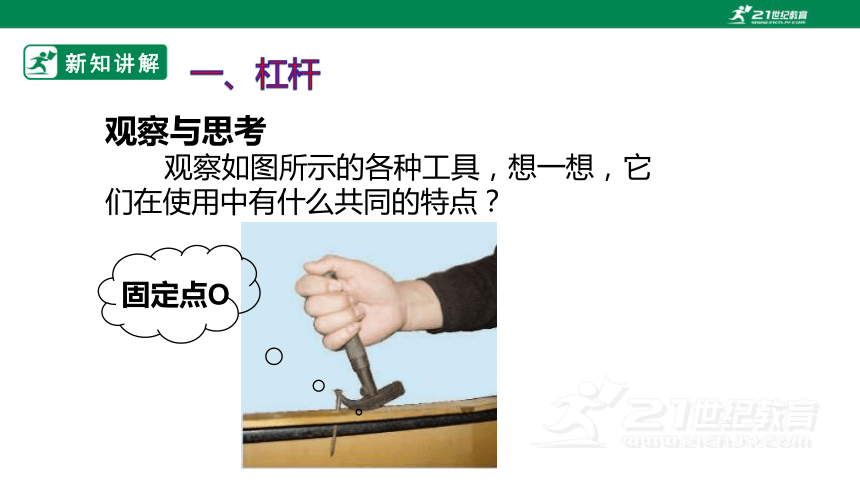
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
图中的各种工具在使用过程中都是绕工具上某一固定点转动的,我们把在力的作用下绕固定点转动的硬棒叫作杠杆(lever)。这个固定点叫支点,通常用O表示。
支点O
O
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
动力F1
F1
阻力F2
F2
L1
动力臂L1
L2
阻力臂L2
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
阻力F2
F2
动力F1
F1
L1
动力臂L1
L2
阻力臂L2
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
动力F1
F1
阻力F2
F2
阻力臂L2
L2
动力臂L1
L1
新知讲解
一、杠杆
图中活塞式抽水机的柄是一根弯曲的杠杆,O为支点,F1为动力,L1为动力臂,F2 为阻力,L2为阻力臂。
新知讲解
一、杠杆
图甲中的每支船桨都是一个杠杆,图乙中的核桃钳由两个杠杆组成。请你找出它们的支点,并画出动力和动力臂、阻力和阻力臂。
固定点O
O
F1
F2
L1
L2
新知讲解
一、杠杆
图甲中的每支船桨都是一个杠杆,图乙中的核桃钳由两个杠杆组成。请你找出它们的支点,并画出动力和动力臂、阻力和阻力臂。
固定点O
O
F2
F1
L1
L2
新知讲解
一、杠杆
小结:作力臂的方法
一定点:确定实际杠杆的支点;二画线:画出作用力所在的直线;三引垂:通过支点向力所在直线引垂线;四标注:用大括号或箭头和字母标注力臂。
固定点O
O
F2
F1
L1
L2
新知讲解
二、杠杆的平衡条件
杠杆在动力和阻力的作用下静止或匀速转动时,我们称之为杠杆平衡。当杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的定量关系呢
新知讲解
学生实验
提出问题 当杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的定量关系呢
新知讲解
学生实验
制订计划与设计实验 实验装置如图所示。
新知讲解
学生实验
进行实验与收集证据 实验前,调节杠杆两端的螺母(或配重),使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 将实验数据填入所设计的表格中。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
动力×动力臂=阻力×阻力臂
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
动力×动力臂=阻力×阻力臂
若用F1、F2、L1和L2分别表示动力、阻力、动力臂和阻力臂,杠杆平衡条件可表示为 。
F1L1=F2L2
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
动力×动力臂=阻力×阻力臂
若用F1、F2、L1和L2分别表示动力、阻力、动力臂和阻力臂,杠杆平衡条件可表示为 。
F1L1=F2L2
你的结论与其他同学的结论是否相同 如果不同,和同学一起分析一下其中的原因。
新知讲解
二、杠杆的平衡条件
我们身边的杠杆有很多。有的能省力,有的可以省距离。你是否能依据杠杆的平衡条件比较简便地判断出一个杠杆是省力还是省距离呢
新知讲解
二、杠杆的平衡条件
如图所示,利用撬杠只要用很小的力就能撬动很重的重物,利用羊角锤能很容易地拔出钉子。这类杠杆的动力臂大于阻力臂,使用它们可以省力。
新知讲解
二、杠杆的平衡条件
如图所示,杠杆的动力臂大于阻力臂,使用它们可以省力。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,还有一类杠杆,如天平,它们的特点是动力臂与阻力臂相等,在使用中既不省力也不省距离,使用它们的目的是改变力的方向。
新知讲解
二、杠杆的平衡条件
省力杠杆:动力臂大于阻力臂,省力费距离。
费力杠杆:动力臂小于阻力臂,费力省距离。
等臂杠杆:动力臂等于阻力臂,既不省力也不省距离,但能改变力的方向。
新知讲解
交流与讨论
图中的几种工具都是杠杆。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
新知讲解
交流与讨论
图中的几种工具都是杠杆。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
费力省距离 省力费距离
新知讲解
交流与讨论
图中指甲钳。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
上面的杠杆省力费距离,下面杠杆是怎样省距离的
新知讲解
二、杠杆的平衡条件
复杂的机器是由简单机械组成的,自行车、汽车、起重机以及许多机器中都包含了各式各样的杠杆。
新知讲解
三、科学窗
轮轴由具有共同转动轴的大轮和小轮组成。习惯上把大轮叫轮,小轮叫轴。轮轴可看作是杠杆的变形。
新知讲解
三、科学窗
图中的辘轳就是典型的轮轴,也可看作杠杆。由杠杆平衡条件可知F1R=F2r,因为轮半径R大于轴半径r,所以作用在轮上的力F1总是小于作用在轴。上的力F2,因此使用辘轳可以省力。
新知讲解
三、科学窗
在实际应用中,为了方便或节约材料,常用杆状物体来代替大轮,如扳手、钓鱼竿上(或放风筝)用的收线器的摇把等。
想一想,在日常生活中你还见过类似的简单机械吗 请你举例说明。
课堂练习
1.关于杠杆的说法不正确的是( )
A.我们把在力的作用下绕固定点转动的硬棒叫作杠杆
B.杠杆都有支点,通常用O表示
C.驱使杠杆转动的力叫动力
D.支点到动力作用线的距离叫阻力臂
D
课堂练习
2.在探究杠杆平衡条件实验中,实验前,调节杠杆两端的螺母,使杠杆在水平位置平衡,其目的是( )
A.力臂与杠杆重合,便于测量力臂
B.力臂与杠杆垂直,便于测量力臂
C.力臂与杠杆重合,便于测量动力
D.力臂与杠杆垂直,便于测量阻力
A
课堂练习
3.在探究杠杆平衡条件实验中,当杠杆左侧第4格挂一个钩码,在杠杆右侧第2格挂一个同样的钩码,杠杆不平衡,要使杠杆重新平衡,正确的做法是( )
A.调节杠杆两端的螺母,使杠杆在水平位置平衡
B.在杠杆右侧增加一个同样的钩码
C.在杠杆左侧增挂一个同样的钩码
D.将杠杆右侧的钩码移到第3格处
B
课堂练习
4.下列物件属于省力杠杆的是( )
A.托盘天平
B.开启啤酒瓶盖的起子
C.扫地的扫把
D.赛艇的船桨
B
课堂练习
5.下列物件属于省距离杠杆的是( )
A.理发剪刀
B.剪铁皮的剪刀
C.拔钉锤
D.核桃夹钳
A
课堂总结
1.杠杆:在力的作用下能绕着固定点转动的硬棒是杠杆,杠杆有五要素,一点,二力,二力臂。
2.杠杆的平衡条件:
(1)调平衡螺母,使杠杆水平。左高往左调。力臂与杠杆巧重合。
(2)结论:F1L1=F2L2
(3)应用:力的单位是N,力臂的单位统一
3.生活中的杠杆:
L1>L2,省力杠杆,撬石头,开瓶器,省力杠杆费距离;
L1<L2,费力杠杆,筷子,扫把,费力杠杆省力;
L1=L2,等臂杠杆,天平,不省力不省距离。
4. 作力臂的方法:一定支点;二作力所在直线;三通过支点向力所在直线作垂线;四标出力臂。
板书设计
1.杠杆:在力的作用下能绕着固定点转动的硬棒是杠杆,杠杆有五要素,一点,二力,二力臂。
2.杠杆的平衡条件:
(1)调平衡螺母,使杠杆水平。左高往左调。力臂与杠杆巧重合。
(2)结论:F1L1=F2L2
(3)应用:力的单位是N,力臂的单位统一
3.生活中的杠杆:
L1>L2,省力杠杆,撬石头,开瓶器,省力杠杆费距离;
L1<L2,费力杠杆,筷子,扫把,费力杠杆省力;
L1=L2,等臂杠杆,天平,不省力不省距离。
4. 作力臂的方法:一定支点;二作力所在直线;三通过支点向力所在直线作垂线;四标出力臂。
作业布置
1.课堂作业P96T1
2.家庭作业P97.T2、T3。
P96 做一做 自制戥子
P97-98 阅读材料 我国古代的杠杠
谢谢
21世纪教育网(www.21cnjy.com)
中小学教育资源网站
兼职招聘:
https://www.21cnjy.com/recruitment/home/admin
9.1 杠杆
北师大版 八年级物理下册
制作 高文超
教学目标
1.物理观念:
(1)能识别出杠杆,并能准确找出支点、动力、阻力、动力臂、阻力臂。
(2)知道杠杆的平衡条件,并能利用杠杆的平衡条件进行相关的计算。
(3)能对杠杆进行分类,并能根据实际需要选择合适的杠杆。
2.科学思维:
通过对杠杆的研究,让学生逐步学会透过现象认识事物本质的方法,培养学生观察能力和用科学的方法解决问题的能力。
教学目标
3.科学探究:
通过实验探究,得出杠杆的平衡条件。
4.科学态度与责任:
(1)从生活中的实例,建立杠杆模型的过程,了解物理学中研究问题的方法。
(2)通过探究杠杆的平衡条件,使学生勇于并乐于参与科学探究,增进交流与合作的意识,加强学生之间的相互协作精神。
(3)通过杠杆分类及应用的学习,感受物理与生活的联系,领会物理知识的应用价值。
教学目标
教学重点
探究杠杆的平衡条件。
教学难点
杠杆示意图中动力臂和阻力臂的画法。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知导入
人们在生产和生活中,制造并使用了各式各样的机械。人们制造机械是为了通过机械做功。
新知讲解
一、杠杆
杠杆是一种常见的简单的机械。
新知讲解
一、杠杆
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
观察与思考
观察如图所示的各种工具,想一想,它们在使用中有什么共同的特点?
固定点O
新知讲解
一、杠杆
图中的各种工具在使用过程中都是绕工具上某一固定点转动的,我们把在力的作用下绕固定点转动的硬棒叫作杠杆(lever)。这个固定点叫支点,通常用O表示。
支点O
O
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
动力F1
F1
阻力F2
F2
L1
动力臂L1
L2
阻力臂L2
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
阻力F2
F2
动力F1
F1
L1
动力臂L1
L2
阻力臂L2
新知讲解
一、杠杆
驱使杠杆转动的力叫动力,阻碍杠杆转动的力叫阻力。支点到动力作用线的距离叫动力臂,支点到阻力作用线的距离叫阻力臂。
支点O
O
动力F1
F1
阻力F2
F2
阻力臂L2
L2
动力臂L1
L1
新知讲解
一、杠杆
图中活塞式抽水机的柄是一根弯曲的杠杆,O为支点,F1为动力,L1为动力臂,F2 为阻力,L2为阻力臂。
新知讲解
一、杠杆
图甲中的每支船桨都是一个杠杆,图乙中的核桃钳由两个杠杆组成。请你找出它们的支点,并画出动力和动力臂、阻力和阻力臂。
固定点O
O
F1
F2
L1
L2
新知讲解
一、杠杆
图甲中的每支船桨都是一个杠杆,图乙中的核桃钳由两个杠杆组成。请你找出它们的支点,并画出动力和动力臂、阻力和阻力臂。
固定点O
O
F2
F1
L1
L2
新知讲解
一、杠杆
小结:作力臂的方法
一定点:确定实际杠杆的支点;二画线:画出作用力所在的直线;三引垂:通过支点向力所在直线引垂线;四标注:用大括号或箭头和字母标注力臂。
固定点O
O
F2
F1
L1
L2
新知讲解
二、杠杆的平衡条件
杠杆在动力和阻力的作用下静止或匀速转动时,我们称之为杠杆平衡。当杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的定量关系呢
新知讲解
学生实验
提出问题 当杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的定量关系呢
新知讲解
学生实验
制订计划与设计实验 实验装置如图所示。
新知讲解
学生实验
进行实验与收集证据 实验前,调节杠杆两端的螺母(或配重),使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 先改变动力或动力臂的大小,然后调节阻力或阻力臂的大小,使杠杆在水平位置平衡。
新知讲解
学生实验
进行实验与收集证据 将实验数据填入所设计的表格中。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
动力×动力臂=阻力×阻力臂
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
实验次数 动力/N 动力臂/m 阻力/N 阻力臂/m
1
2
3
1 0.1 2 0.05
2 0.1 4 0.05
2 0.2 4 0.1
动力×动力臂=阻力×阻力臂
若用F1、F2、L1和L2分别表示动力、阻力、动力臂和阻力臂,杠杆平衡条件可表示为 。
F1L1=F2L2
新知讲解
学生实验
分析论证 根据上述实验数据得出的结论是 。
动力×动力臂=阻力×阻力臂
若用F1、F2、L1和L2分别表示动力、阻力、动力臂和阻力臂,杠杆平衡条件可表示为 。
F1L1=F2L2
你的结论与其他同学的结论是否相同 如果不同,和同学一起分析一下其中的原因。
新知讲解
二、杠杆的平衡条件
我们身边的杠杆有很多。有的能省力,有的可以省距离。你是否能依据杠杆的平衡条件比较简便地判断出一个杠杆是省力还是省距离呢
新知讲解
二、杠杆的平衡条件
如图所示,利用撬杠只要用很小的力就能撬动很重的重物,利用羊角锤能很容易地拔出钉子。这类杠杆的动力臂大于阻力臂,使用它们可以省力。
新知讲解
二、杠杆的平衡条件
如图所示,杠杆的动力臂大于阻力臂,使用它们可以省力。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,只要划船者的手向后移动较小的距离,就能使桨在水中移动较大的距离。这类杠杆的特点是动力臂小于阻力臂,可以省距离,但是使用时比较费力,一般在阻力不太大的情况下使用。
新知讲解
二、杠杆的平衡条件
如图所示,还有一类杠杆,如天平,它们的特点是动力臂与阻力臂相等,在使用中既不省力也不省距离,使用它们的目的是改变力的方向。
新知讲解
二、杠杆的平衡条件
省力杠杆:动力臂大于阻力臂,省力费距离。
费力杠杆:动力臂小于阻力臂,费力省距离。
等臂杠杆:动力臂等于阻力臂,既不省力也不省距离,但能改变力的方向。
新知讲解
交流与讨论
图中的几种工具都是杠杆。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
新知讲解
交流与讨论
图中的几种工具都是杠杆。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
费力省距离 省力费距离
新知讲解
交流与讨论
图中指甲钳。在使用时,哪个省力 哪个省距离
F2
L1
O
F1
L2
上面的杠杆省力费距离,下面杠杆是怎样省距离的
新知讲解
二、杠杆的平衡条件
复杂的机器是由简单机械组成的,自行车、汽车、起重机以及许多机器中都包含了各式各样的杠杆。
新知讲解
三、科学窗
轮轴由具有共同转动轴的大轮和小轮组成。习惯上把大轮叫轮,小轮叫轴。轮轴可看作是杠杆的变形。
新知讲解
三、科学窗
图中的辘轳就是典型的轮轴,也可看作杠杆。由杠杆平衡条件可知F1R=F2r,因为轮半径R大于轴半径r,所以作用在轮上的力F1总是小于作用在轴。上的力F2,因此使用辘轳可以省力。
新知讲解
三、科学窗
在实际应用中,为了方便或节约材料,常用杆状物体来代替大轮,如扳手、钓鱼竿上(或放风筝)用的收线器的摇把等。
想一想,在日常生活中你还见过类似的简单机械吗 请你举例说明。
课堂练习
1.关于杠杆的说法不正确的是( )
A.我们把在力的作用下绕固定点转动的硬棒叫作杠杆
B.杠杆都有支点,通常用O表示
C.驱使杠杆转动的力叫动力
D.支点到动力作用线的距离叫阻力臂
D
课堂练习
2.在探究杠杆平衡条件实验中,实验前,调节杠杆两端的螺母,使杠杆在水平位置平衡,其目的是( )
A.力臂与杠杆重合,便于测量力臂
B.力臂与杠杆垂直,便于测量力臂
C.力臂与杠杆重合,便于测量动力
D.力臂与杠杆垂直,便于测量阻力
A
课堂练习
3.在探究杠杆平衡条件实验中,当杠杆左侧第4格挂一个钩码,在杠杆右侧第2格挂一个同样的钩码,杠杆不平衡,要使杠杆重新平衡,正确的做法是( )
A.调节杠杆两端的螺母,使杠杆在水平位置平衡
B.在杠杆右侧增加一个同样的钩码
C.在杠杆左侧增挂一个同样的钩码
D.将杠杆右侧的钩码移到第3格处
B
课堂练习
4.下列物件属于省力杠杆的是( )
A.托盘天平
B.开启啤酒瓶盖的起子
C.扫地的扫把
D.赛艇的船桨
B
课堂练习
5.下列物件属于省距离杠杆的是( )
A.理发剪刀
B.剪铁皮的剪刀
C.拔钉锤
D.核桃夹钳
A
课堂总结
1.杠杆:在力的作用下能绕着固定点转动的硬棒是杠杆,杠杆有五要素,一点,二力,二力臂。
2.杠杆的平衡条件:
(1)调平衡螺母,使杠杆水平。左高往左调。力臂与杠杆巧重合。
(2)结论:F1L1=F2L2
(3)应用:力的单位是N,力臂的单位统一
3.生活中的杠杆:
L1>L2,省力杠杆,撬石头,开瓶器,省力杠杆费距离;
L1<L2,费力杠杆,筷子,扫把,费力杠杆省力;
L1=L2,等臂杠杆,天平,不省力不省距离。
4. 作力臂的方法:一定支点;二作力所在直线;三通过支点向力所在直线作垂线;四标出力臂。
板书设计
1.杠杆:在力的作用下能绕着固定点转动的硬棒是杠杆,杠杆有五要素,一点,二力,二力臂。
2.杠杆的平衡条件:
(1)调平衡螺母,使杠杆水平。左高往左调。力臂与杠杆巧重合。
(2)结论:F1L1=F2L2
(3)应用:力的单位是N,力臂的单位统一
3.生活中的杠杆:
L1>L2,省力杠杆,撬石头,开瓶器,省力杠杆费距离;
L1<L2,费力杠杆,筷子,扫把,费力杠杆省力;
L1=L2,等臂杠杆,天平,不省力不省距离。
4. 作力臂的方法:一定支点;二作力所在直线;三通过支点向力所在直线作垂线;四标出力臂。
作业布置
1.课堂作业P96T1
2.家庭作业P97.T2、T3。
P96 做一做 自制戥子
P97-98 阅读材料 我国古代的杠杠
谢谢
21世纪教育网(www.21cnjy.com)
中小学教育资源网站
兼职招聘:
https://www.21cnjy.com/recruitment/home/admin