第十二章 简单机械 全章复习 课件(共80张PPT) 2023-2024学年物理人教版八年级下册
文档属性
| 名称 | 第十二章 简单机械 全章复习 课件(共80张PPT) 2023-2024学年物理人教版八年级下册 |

|
|
| 格式 | pptx | ||
| 文件大小 | 5.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-05-17 00:00:00 | ||
图片预览







文档简介
(共80张PPT)
第十二章 简单机械
全章复习 温故
全章复习 温故
知识清单
全章复习 温故
重难点解读
重难点1 杠杆作图及杠杆平衡条件的应用
图12-1
1.杠杆的五要素:如图12-1所示。
2.力臂的画法:①找出支点,②画出力
的作用线,③过支点作力的作用线的垂线,
④标上力臂的符号。
3.杠杆平衡的条件:动力×动力臂 阻力
×阻力臂。公式: 。
4.生活中的杠杆
(1)省力杠杆:动力臂大于阻力臂的杠杆,省力但费距离。
(2)费力杠杆:动力臂小于阻力臂的杠杆,费力但省距离。
(3)等臂杠杆:动力臂等于阻力臂的杠杆,既不省力也不省距离。
图12-2
例1 图12-2甲是果农修剪树枝的情景,
图12-2乙是图甲剪刀部分的简化图,
是剪刀受到的动力, 是阻力的作用点。
请在图12-2乙中标出支点 的位置,并
作出阻力和动力臂 。
图12-3
【解析】本题考查力臂的画法。画力臂的关键是要画出支
点到力的作用线的垂线段。由图12-2甲可知支点 在剪刀的
转轴处,从支点向动力的作用线引垂线,垂线段即为动力
臂;阻力垂直于 点所在的刀面;动力使杠杆向顺时针
方向转动,所以阻力应使其向逆时针方向转动,由于阻力
臂比动力臂短,所以阻力大于动力,故的线段要比 长一些,
如图12-3所示。
【答案】如图12-3所示
针对训练
图12-4
1.图12-4甲是打开的汽车后备箱盖的
情景,后备箱箱盖被液压杆支撑
(不计后备箱盖重)。关箱盖时,
它可看作一个杠杆,图12-4乙是其
简化图,是支点, 是液压杆作
①阻力臂;②在点关上后备箱盖的最小动力及其力臂 。
用在 点的阻力。请在图12-4乙中画出:
图12-4
【提示】(1)阻力臂为支点到阻力
作用线的距离,先用虚线反向延长
,再由点作 作用线的垂线即
为阻力臂。(2)要使动力最小,则
动力臂最长, 作为动力臂时最省
力;阻力方向向上,因此动力 方向垂直于动力臂向下。
【答案】如答图12所示
答图12
例2 如图12-5所示,质地均匀的圆柱体在拉力 的作用下,由实线位置
匀速转到虚线位置。在整个过程中,拉力始终作用于点且与 保持
垂直 为圆柱体横截面的直径),圆柱体在转动过程中不打滑。下列
相关分析正确的是( )
图12-5
A.拉力 逐渐变小
B.由于拉力的力臂始终保持最长,拉力 始终保持最小
值不变
C.拉力 逐渐变大
D.条件不足,无法判断
图12-5
【解析】本题考查杠杆的动态平衡。由题意知,圆柱体
在匀速转动过程中处于平衡状态,且拉力始终与 保
持垂直,由杠杆平衡原理可知,其中
是重力的力臂。圆柱体在转动过程中的力臂 保持不
变,但是重力的力臂逐渐变小,所以拉力 逐渐变小。故选项A分析
正确。
例2 如图12-5所示,质地均匀的圆柱体在拉力 的作用下,由实线位置
匀速转到虚线位置。在整个过程中,拉力始终作用于点且与 保持
垂直 为圆柱体横截面的直径),圆柱体在转动过程中不打滑。下列
相关分析正确的是( )
图12-5
A.拉力 逐渐变小
B.由于拉力的力臂始终保持最长,拉力 始终保持最小
值不变
C.拉力 逐渐变大
D.条件不足,无法判断
A
针对训练
图12-6
2.如图12-6所示,一根直杆可绕 点转动,杠杆下端挂一个
重物,为了提高重物,用一个始终跟杠杆垂直的力 使杠杆
由竖直位置慢慢转到水平位置。在这个过程中直杆( )
A.始终是省力杠杆 B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆 D.先是费力杠杆,后是省力杠杆
【提示】由题图可知动力的力臂 始终保持不变,物体的重力 始终不
变,在杠杆从竖直位置向水平位置转动的过程中,重力的力臂逐渐增
大,在 的过程中,杠杆是省力杠杆,在 的过程中,杠杆变为
费力杠杆。
C
重难点2 滑轮组
使用滑轮组时应注意以下几点:
(1)给滑轮组绕线时,同一个滑轮只能绕一圈绳子。
(2)若不计绳重及轴间摩擦,则利用滑轮提升重物时,有用功克
服的阻力是物体所受的重力;利用滑轮组使物体水平前进时,有用功克
服的阻力是物体所受的摩擦力。
(3)组装滑轮组时,要分清绳子的自由端是否承担物重。若绳子
自由端与动滑轮相连,则承担物重;若绳子的自由端与定滑轮相连,则
不承担物重。
(4)使用滑轮组时,省力但费距离。若物重上升距离为 ,绳子自
由端移动的距离为,绳子的有效段数为,则有 。
(5)忽略绳重和摩擦的情况下,拉力为
。
图12-7
例3 电气化铁路的高压输电线,无
论在严冬还是盛夏都要绷直,才能
使高压线与列车的电极接触良好,
这就必须对高压线施加恒定的拉力。
为此,工程师设计了如图12-7甲所
示的恒拉力系统,图12-7乙为其简
化原理图。实际测量得到每个水泥块的体积为 ,共悬挂20
个水泥块。已知水泥块的密度为,取 。
图12-7
(1)请指出图乙中的动滑轮和定滑轮。
(2)每个水泥块的重力是多大
(3)滑轮组对高压线的拉力是多大 (不计绳重、滑轮自重及摩擦)
图12-7
分析 (1)题图乙中、 滑轮是固定在电线杆上的,滑轮 是活动的,故
、是定滑轮, 是动滑轮。
(2)已知水泥块的密度和体积,可根据、 计算水泥块的重力。
(3)先确定连接动滑轮的绳
子段数 ,由滑轮组的特
点可知 ,由二力平衡
条件求出 即可。
解: 、是定滑轮, 是动滑轮。
(2) 由 得每个水泥块的质量为
则每个水泥块的重力为
(3)由二力平衡条件得,水泥块
对钢丝绳的拉力为
由题图可知,承接动滑轮的绳子段数为 ,则滑轮
组对高压输电线的拉力为
图12-7
针对训练
图12-8
3.如图12-8所示,每个滑轮的重力相等,不计绳重和摩擦
力,, ,甲、乙两种情况下,绳子在
大小相等的拉力 作用下静止。则每个滑轮的重力为( )
A. B. C. D.
【提示】由题图可知,甲图中承担物重的绳子段数为3,
乙图中承担物重的绳子段数为2,不计绳重和摩擦力,
则绳端拉力分别为, ,
已知,即,解得 。
B
图12-9
4.在水平桌面上放一个重 的物体,现用如图1
2-9所示装置将物体匀速拉动,物体与桌面的摩擦力
是 ,不考虑绳重、滑轮自重以及滑轮与绳间的摩
0.2
擦,则水平拉力为____。若绳子自由端移动的速度为 ,则物体
移动的速度为____ 。
重难点3 机械效率的计算
1.机械效率的计算公式:,其中 。
2.杠杆的机械效率: ,额外功是克服杠杆本身的重力
做的功。
3.斜面的机械效率: ,额外功是克服物体与斜面之间
的摩擦力做的功, 。
4.滑轮组的机械效率
(1)一般情况: ,额外功是克服动滑轮的
重力、机械之间的摩擦力和绳子的重力做的功。
(2)忽略绳重和摩擦: ,额
外功是克服动滑轮的重力做的功 ,此时机械效率与绕绳方
式无关。
(3)注意:滑轮组的有用功是动滑轮与物体连接的绳子上的拉力
所做的功,该拉力不一定是用来克服重力或摩擦力做功(如打捞水下物
体的情形);做题时要注意明确是哪个力做有用功,哪个力做额外功,
哪个力做总功。
5.理解:机械效率是有用功与总功之比,机械效率与功率没有直接
联系,机械效率大不代表功率大或做功多。
图12-10
例4 如图12-10所示,建筑工人用滑轮组在 的时间内
将重为的物体匀速提升,所用的拉力为 。
求这个过程中:
(1)工人做的有用功;
(2)拉力的功率;
(3)滑轮组的机械效率。
分析本题考查滑轮组的功、功率和机械效率的相关计算,要注意确定哪个力做的是有用功,哪个力做的是总功,然后根据滑轮组的特点进行分析求解。
(1)克服物体重力做的功是有用功,已知物体所受的重力及其上升的高度,可根据 直接计算有用功。
(2)拉力做的功是总功,求拉力的功率要用公式 ,已知做功时间,要先求出 ;已知拉力,由 算出绳子自由端移动的距离即可得解。
(3)求滑轮组的机械效率要用公式 ,直接将前面已求出有用功和总功的数值代入公式计算即可。
图12-10
解: (1) 有用为
(2)承担物重的绳子段数 ,则绳子自由端移动
的距离为
拉力做的功是总功,总功为
拉力做功的功率为
(3)滑轮组的机械效率为
图12-10
针对训练
图12-11
5.两个滑轮按图12-11所示的方式组合,用的拉力
拉动绳端,使物体在内水平向左匀速滑动 ,物
体与地面间的摩擦力为 。下列说法正确的是
( )
A.是定滑轮,是动滑轮 B.拉力做的功为
C.拉力的功率为 D.滑轮组的机械效率为
图12-11
【提示】滑轮随物体一起运动,为动滑轮; 滑轮
的轴固定不动,为定滑轮。由图知, ,拉力端
移动距离 ,拉力做功
。拉力的功率 。拉力
克服地面摩擦做的功为有用功 ,滑轮组的机
械效率 ,故选项D正确。
针对训练
图12-11
5.两个滑轮按图12-11所示的方式组合,用的拉力
拉动绳端,使物体在内水平向左匀速滑动 ,物
体与地面间的摩擦力为 。下列说法正确的是
( )
A.是定滑轮,是动滑轮 B.拉力做的功为
C.拉力的功率为 D.滑轮组的机械效率为
D
6.港珠澳大桥是中国第一条集桥、双人工岛、隧道为一体的跨海通道,
其中长约 的沉管隧道通过引桥与人工岛路面相连,引桥长约
,竖直高度为,其简化图如图12-12所示。重 的
汽车在沉管隧道中以的速度匀速行驶,所受阻力为其重力的 。
某汽车从引桥底端开始匀速爬升,其功率增大到,耗时 到达
人工岛路面,求:
图12-12
(1)该汽车完全通过沉管
隧道需的时间;
(2)该汽车在沉管隧道中行驶时,牵引力所做的功;
(3)该汽车在引桥上所受阻力的大小;(已知牵引力所做的功一部分
用于克服重力,剩下的用于克服摩擦阻力)
图12-12
(4)引桥对于该汽车的机械效率。
图12-12
解:(1)沉管隧道中汽车速度,则由 得
汽车完全通过沉管隧道需要的时间为
(2)汽车在沉管隧道中所受阻力大小为
因为汽车做匀速直线运动,所以汽车所受牵引力为
则汽车在沉管隧道中行驶时,牵引力所做的功为
图12-12
(3)汽车在引桥上行驶时功率,根据
可得牵引力所做的功为
克服重力做功为
则阻力做功为
由 得汽车在引桥上所受阻力的大小为
图12-12
(4)汽车从引桥底端到顶端,所做有用功为克服重力做的功,即
总功为牵引力做功,即
所以引桥的机械效率为
全章复习 温故
实验突破
实验一 探究杠杆的平衡条件
实验 装置
实验 方法 (1)调节平衡螺母,使杠杆水平平衡
(2)在杠杆两侧挂上不同数量的钩码(每个钩码质量相同),
移动钩码的位置,使杠杆重新在水平位置平衡,记录动力 、阻
力、动力臂、阻力臂
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,重复做几次实验
续表
实验 方法 (4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹
簧测力计拉住杠杆的方法使杠杆平衡,记录、、、 的数
值
(5)将各组数据中的力与力臂进行相乘或相除,看看计算结果
有什么规律,进而归纳得出杠杆平衡的条件
续表
注意 事项 (1)实验前要调节平衡螺母,使杠杆水平平衡
(2)实验中不能调节平衡螺母
(3)为得到普遍性规律,须改变所悬挂钩码的数量和位置进行
多次测量
实验 结论 杠杆平衡的条件:动力×动力臂阻力×阻力臂,即
续表
评估 交流 (1)实验前调节杠杆水平平衡的目的:使杠杆的重心在支点
处,消除杠杆自重对实验的影响
(2)实验前调节杠杆水平平衡时,调节平衡螺母的方法:左高
左调、右高右调
(3)实验时使杠杆在水平位置静止,目的是便于测量力臂
续表
深入 拓展 (1)进行多次实验的目的是寻找普遍性规律
(2)杠杆在水平位置平衡时,若同时将两侧钩码悬点向外或向
内移动相同的距离,或同时取下左右两侧相同数量的钩码,可通
过“力与力臂乘积的变化量”来判断哪一侧下沉
(3)用弹簧测力计代替杠杆一侧所挂的钩码,当弹簧测力计由
竖直方向拉变成倾斜方向拉时,要使杠杆仍保持平衡,弹簧测力
计的示数会变大,这是因为拉力的力臂变小
续表
例1 在“探究杠杆平衡条件”的实验中:
图12-13
(1)如图12-13甲,把质量
分布均匀的杠杆中点 作为
支点,其目的是消除______
_____对实验的影响。为了
方便直接测出力臂,实验前
应先调节杠杆在水平位置平
衡,当在 处挂上钩码后杠杆转动,说明力能改变物体的__________。
图12-13
(2)图12-13乙中杠杆恰
好处于水平位置平衡,若
在 处下方再挂一个相同的
钩码,为使杠杆保持水平
平衡,需将挂在 处的钩码
向右移动___格。当杠杆平
衡、钩码静止时,挂在 处的钩码所受重力和钩码所受拉力是一对
______力。
图12-13
(3)如图12-13丙,小明
取下 处钩码,改用弹簧测
力计钩在 处,使杠杆再次
在水平位置平衡,弹簧测
计示数______(选填“大于”
“小于”或“等于”) (每
个钩码重 ),如果竖直向上拉动弹簧测力计,它是______(选填
“省力” “费力”或“等臂”)杠杆。
(4)小明经过多次实验,分析实验数据后得出了杠杆平衡条件:_____
______________________________________。
图12-13
图12-13
【解析】(1)把质量分布均匀的
杠杆中点置于支架上,调节
平衡螺母使杠杆的重心在支
点上,以消除杠杆自重对杠
杆平衡的影响;为了方便直
接读出力臂,实验前应先调
节杠杆在水平位置平衡;当在 处挂上钩码后杠杆转动,说明力能改变
物体的运动状态。
图12-13
【解析】(2)设一个钩码
重为 ,一格的长度
为 ;根据杠杆的平
衡条件可得
,
解得,故 处所
挂钩码须向右移动1
格;静止的钩码处于平衡状态,其受到的重力和受到的弹簧测力计的拉
力是一对平衡力。
图12-13
【解析】(3)题图丙中,小明取
下 处钩码,改用弹簧测力
计钩在 处,使杠杆再次在
水平位置平衡,根据杠杆的
平衡条件,若竖直向上拉动,
则弹簧测计示数为
,由于弹簧测力计拉力的力臂小于 ,
故大于 ;若竖直向上拉动弹簧测力计,则此时弹簧测力计力的力臂
大于钩码的力臂,故为省力杠杆。
【解析】(4)杠杆的平衡条件为“动力×动力臂 阻力×阻力臂(或
)”。
例1 在“探究杠杆平衡条件”的实验中:
图12-13
(1)如图12-13甲,把质量分布均匀的杠杆中
点 作为支点,其目的是消
除___________对实验的影
响。为了方便直接测出力臂,
实验前应先调节杠杆在水平
位置平衡,当在 处挂上钩
码后杠杆转动,说明力能改变物体的__________。
杠杆自重
运动状态
图12-13
(2)图12-13乙中杠杆恰
好处于水平位置平衡,若
在 处下方再挂一个相同的
钩码,为使杠杆保持水平
平衡,需将挂在 处的钩码
向右移动___格。当杠杆平
衡、钩码静止时,挂在 处的钩码所受重力和钩码所受拉力是一对
______力。
1
平衡
图12-13
(3)如图12-13丙,小明
取下 处钩码,改用弹簧测
力计钩在 处,使杠杆再次
在水平位置平衡,弹簧测
计示数______(选填“大于”
“小于”或“等于”) (每
个钩码重 ),如果竖直向上拉动弹簧测力计,它是______(选填
“省力” “费力”或“等臂”)杠杆。
大于
省力
(4)小明经过多次实验,分析实验数据后得出了杠杆平衡条件:
___________________________________________。
图12-13
动力×动力臂阻力×阻力臂(或 )
拓展考问
1.在“探究杠杆平衡条件”的实验中:
(1)挂钩码前,杠杆倾斜且静止,此时杠杆处于平衡状态,接下来调
节杠杆两端的螺母,使杠杆处于______________。
水平位置平衡
(2)图12-13乙中,若同时将杠杆两侧悬挂钩码的位置向外移一格,则
杠杆____端下沉;若同时在杠杆左右两侧的钩码下加挂一个钩码,则杠
杆____端下沉。(均选填“左”或“右”)
左
右
(3)探究中进行多次实验的目的是________________。
寻找普遍性规律
实验二 测量滑轮组的机械效率
实验 装置
实验 方法 实验原理:。应测物理量有钩码重力 、钩码提升
的高度、拉力、绳子自由端移动的距离
注意 事项 必须匀速拉动弹簧测力计使钩码升高,目的是保证弹簧测力计
示数稳定
实验 结论 (1)同一个滑轮组,所提升物体的重力越大,机械效率越高
(2)不同滑轮组,所提升物体的重力相等时,动滑轮的重力越
小,机械效率越高
(3)滑轮组的机械效率与绕线方式和提升重物的高度无关
续表
评估 交流 (1)若绳子自由端与动滑轮连接,则须匀速竖直拉动弹簧测力
计;若绳子自由端与定滑轮连接,则匀速拉动弹簧测力计即
可,无须竖直拉动
(2)实验误差的主要来源:弹簧测力计的示数不稳定(难以保
证匀速拉动)
续表
深入 拓展 (1)影响滑轮组机械效率的主要因素有物体的重力、动滑轮的
重力、滑轮与绳间的摩擦;提高滑轮组机械效率的方法主要有
增加所提升物体的重力、减小动滑轮的重力、减小摩擦
(2)实验改进:在原来的实验装置中,使绳子自由端跨过定滑
轮拉重物(如图丙所示)。优点:可改变绳子自由端的拉力方
向,且拉力不必沿竖直方向
续表
例2 同学们在探究“影响滑轮组机械效率高低的因素”时提出了下列猜想:
猜想一:滑轮组机械效率可能与动滑轮重有关;
猜想二:滑轮组机械效率可能与被提物重有关;
猜想三:滑轮组机械效率可能与物体提升高度有关;
猜想四:滑轮组机械效率可能与承重绳子段数有关。
一名同学设计了如图12-14所示的四个滑轮组,并将所测实验数据填入下表:
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(1)在表中填上第④次实验的对应的承重绳子段数和机械效率 的数值。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(2)根据实验____和____(填序号)可知,滑轮组机械效率与被提物重有关。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(3)根据实验②和④可知,滑轮组的机械效率与______________无关。
图12-14
(4)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,机械效率越____。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
图12-14
(5)要研究滑轮组机械效率是否与物
体提升高度有关,应该选用______
(选填“同一”或“不同”)滑轮组,使
物体提升______(选填“相同”或“不
同”)的高度。
【解析】(1)由图④知承重绳子段数为,
根据 得第④组实验数据对应的机械效率为
。
(2)要探究机械效率与物重的关系,须保持动滑轮重及绕线方式相同,
同时使被提升物体的重力不同,故应根据实验①和②进行分析。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(3)实验②和④中,动滑轮的重力相同,被提升物体的重力相同,但承重绳子段数不同,而滑轮组机械效率近似相等,据此可知滑轮组机械效率与承重绳子段数无关。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(4)根据实验②和③可知,提升相同的重物,动滑轮越重,滑轮组的机械效率越小。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(5)要探究机械效率与物体被提升的高度之间的关系,应保持其他因素相同,而提升的高度不同。故应选用同一滑轮组,使物体提升不同的高度。
图12-14
(1)在表中填上第④次实验的对应的承重绳子段数和机械效率 的数值。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
2
80%
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(2)根据实验____和____(填序号)可知,滑轮组机械效率与被提物重有关。
图12-14
①
②
2
80%
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(3)根据实验②和④可知,滑轮组的机械效率与______________无关。
图12-14
承重绳子段数
2
80%
(4)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,机械效率越____。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
小
2
80%
图12-14
(5)要研究滑轮组机械效率是否与物
体提升高度有关,应该选用______
(选填“同一”或“不同”)滑轮组,使
物体提升______(选填“相同”或“不
同”)的高度。
同一
不同
拓展考问
图12-15
2.小林在“测量滑轮组的机械效率”
的实验中的操作情况如图12-15甲、
乙、丙所示。
(1)实验中要竖直向上______拉动
弹簧测力计,使物休升高。
匀速
(2)在图12-15丙所示实验中,若将
滑轮组换一种绕绳方法,不计摩擦及
绳重,提升相同的物体时,滑轮组的机
械效率______ (选填“变大”“不变”
或“变小”)。
不变
图12-15
(3)小林与其他同学交流时发现,
有一个小组的滑轮组组装方式如图
12-15丁所示,其优点是___________
________________。
可沿任意方
向匀速拉动绳子
第十二章 简单机械
全章复习 温故
全章复习 温故
知识清单
全章复习 温故
重难点解读
重难点1 杠杆作图及杠杆平衡条件的应用
图12-1
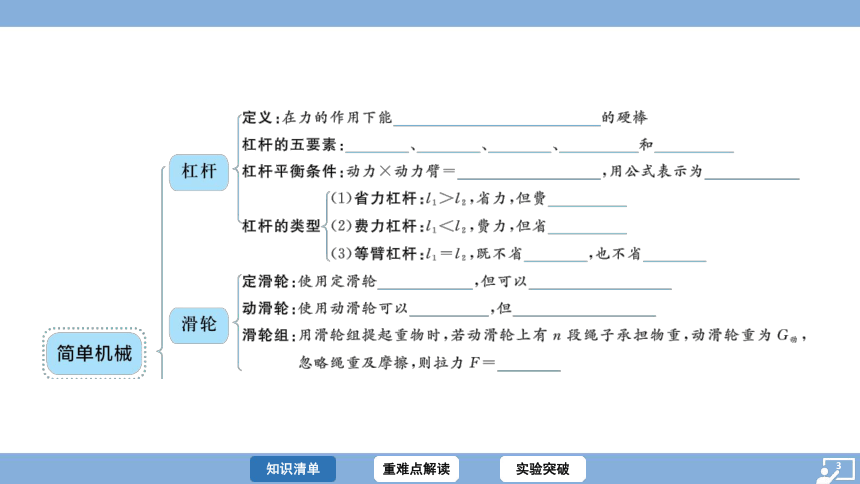
1.杠杆的五要素:如图12-1所示。
2.力臂的画法:①找出支点,②画出力
的作用线,③过支点作力的作用线的垂线,
④标上力臂的符号。
3.杠杆平衡的条件:动力×动力臂 阻力
×阻力臂。公式: 。
4.生活中的杠杆
(1)省力杠杆:动力臂大于阻力臂的杠杆,省力但费距离。
(2)费力杠杆:动力臂小于阻力臂的杠杆,费力但省距离。
(3)等臂杠杆:动力臂等于阻力臂的杠杆,既不省力也不省距离。
图12-2
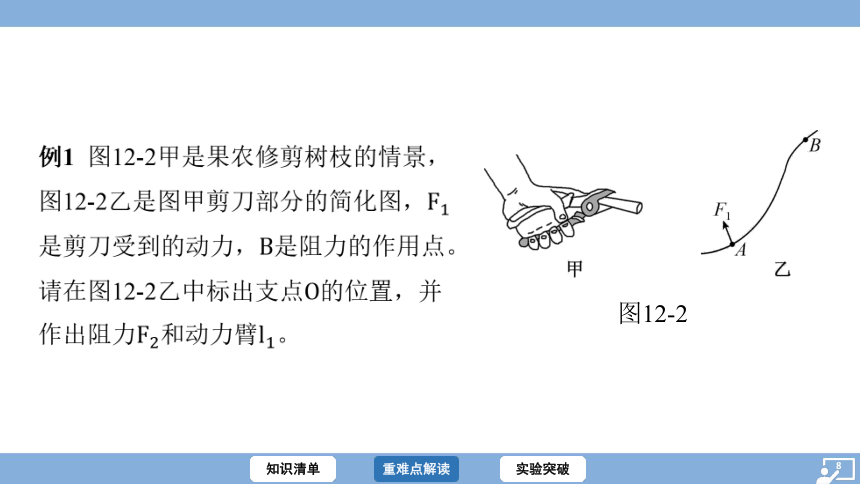
例1 图12-2甲是果农修剪树枝的情景,
图12-2乙是图甲剪刀部分的简化图,
是剪刀受到的动力, 是阻力的作用点。
请在图12-2乙中标出支点 的位置,并
作出阻力和动力臂 。
图12-3
【解析】本题考查力臂的画法。画力臂的关键是要画出支
点到力的作用线的垂线段。由图12-2甲可知支点 在剪刀的
转轴处,从支点向动力的作用线引垂线,垂线段即为动力
臂;阻力垂直于 点所在的刀面;动力使杠杆向顺时针
方向转动,所以阻力应使其向逆时针方向转动,由于阻力
臂比动力臂短,所以阻力大于动力,故的线段要比 长一些,
如图12-3所示。
【答案】如图12-3所示
针对训练
图12-4
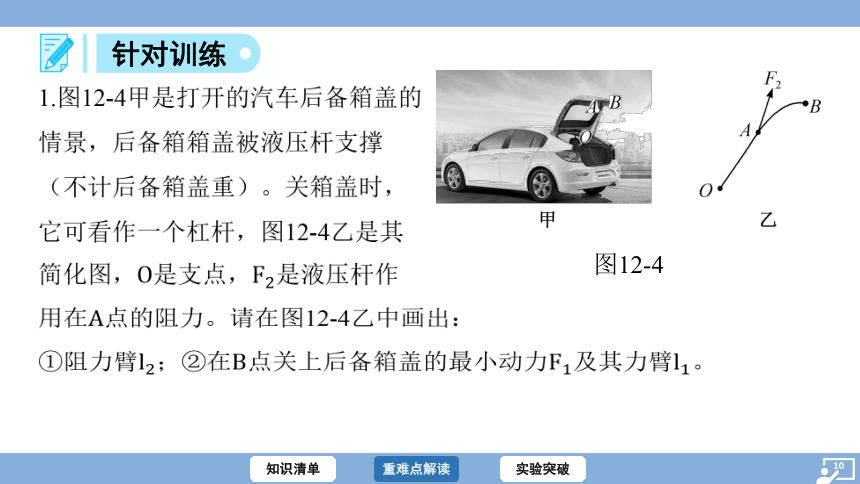
1.图12-4甲是打开的汽车后备箱盖的
情景,后备箱箱盖被液压杆支撑
(不计后备箱盖重)。关箱盖时,
它可看作一个杠杆,图12-4乙是其
简化图,是支点, 是液压杆作
①阻力臂;②在点关上后备箱盖的最小动力及其力臂 。
用在 点的阻力。请在图12-4乙中画出:
图12-4
【提示】(1)阻力臂为支点到阻力
作用线的距离,先用虚线反向延长
,再由点作 作用线的垂线即
为阻力臂。(2)要使动力最小,则
动力臂最长, 作为动力臂时最省
力;阻力方向向上,因此动力 方向垂直于动力臂向下。
【答案】如答图12所示
答图12
例2 如图12-5所示,质地均匀的圆柱体在拉力 的作用下,由实线位置
匀速转到虚线位置。在整个过程中,拉力始终作用于点且与 保持
垂直 为圆柱体横截面的直径),圆柱体在转动过程中不打滑。下列
相关分析正确的是( )
图12-5
A.拉力 逐渐变小
B.由于拉力的力臂始终保持最长,拉力 始终保持最小
值不变
C.拉力 逐渐变大
D.条件不足,无法判断
图12-5
【解析】本题考查杠杆的动态平衡。由题意知,圆柱体
在匀速转动过程中处于平衡状态,且拉力始终与 保
持垂直,由杠杆平衡原理可知,其中
是重力的力臂。圆柱体在转动过程中的力臂 保持不
变,但是重力的力臂逐渐变小,所以拉力 逐渐变小。故选项A分析
正确。
例2 如图12-5所示,质地均匀的圆柱体在拉力 的作用下,由实线位置
匀速转到虚线位置。在整个过程中,拉力始终作用于点且与 保持
垂直 为圆柱体横截面的直径),圆柱体在转动过程中不打滑。下列
相关分析正确的是( )
图12-5
A.拉力 逐渐变小
B.由于拉力的力臂始终保持最长,拉力 始终保持最小
值不变
C.拉力 逐渐变大
D.条件不足,无法判断
A
针对训练
图12-6
2.如图12-6所示,一根直杆可绕 点转动,杠杆下端挂一个
重物,为了提高重物,用一个始终跟杠杆垂直的力 使杠杆
由竖直位置慢慢转到水平位置。在这个过程中直杆( )
A.始终是省力杠杆 B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆 D.先是费力杠杆,后是省力杠杆
【提示】由题图可知动力的力臂 始终保持不变,物体的重力 始终不
变,在杠杆从竖直位置向水平位置转动的过程中,重力的力臂逐渐增
大,在 的过程中,杠杆是省力杠杆,在 的过程中,杠杆变为
费力杠杆。
C
重难点2 滑轮组
使用滑轮组时应注意以下几点:
(1)给滑轮组绕线时,同一个滑轮只能绕一圈绳子。
(2)若不计绳重及轴间摩擦,则利用滑轮提升重物时,有用功克
服的阻力是物体所受的重力;利用滑轮组使物体水平前进时,有用功克
服的阻力是物体所受的摩擦力。
(3)组装滑轮组时,要分清绳子的自由端是否承担物重。若绳子
自由端与动滑轮相连,则承担物重;若绳子的自由端与定滑轮相连,则
不承担物重。
(4)使用滑轮组时,省力但费距离。若物重上升距离为 ,绳子自
由端移动的距离为,绳子的有效段数为,则有 。
(5)忽略绳重和摩擦的情况下,拉力为
。
图12-7
例3 电气化铁路的高压输电线,无
论在严冬还是盛夏都要绷直,才能
使高压线与列车的电极接触良好,
这就必须对高压线施加恒定的拉力。
为此,工程师设计了如图12-7甲所
示的恒拉力系统,图12-7乙为其简
化原理图。实际测量得到每个水泥块的体积为 ,共悬挂20
个水泥块。已知水泥块的密度为,取 。
图12-7
(1)请指出图乙中的动滑轮和定滑轮。
(2)每个水泥块的重力是多大
(3)滑轮组对高压线的拉力是多大 (不计绳重、滑轮自重及摩擦)
图12-7
分析 (1)题图乙中、 滑轮是固定在电线杆上的,滑轮 是活动的,故
、是定滑轮, 是动滑轮。
(2)已知水泥块的密度和体积,可根据、 计算水泥块的重力。
(3)先确定连接动滑轮的绳
子段数 ,由滑轮组的特
点可知 ,由二力平衡
条件求出 即可。
解: 、是定滑轮, 是动滑轮。
(2) 由 得每个水泥块的质量为
则每个水泥块的重力为
(3)由二力平衡条件得,水泥块
对钢丝绳的拉力为
由题图可知,承接动滑轮的绳子段数为 ,则滑轮
组对高压输电线的拉力为
图12-7
针对训练
图12-8
3.如图12-8所示,每个滑轮的重力相等,不计绳重和摩擦
力,, ,甲、乙两种情况下,绳子在
大小相等的拉力 作用下静止。则每个滑轮的重力为( )
A. B. C. D.
【提示】由题图可知,甲图中承担物重的绳子段数为3,
乙图中承担物重的绳子段数为2,不计绳重和摩擦力,
则绳端拉力分别为, ,
已知,即,解得 。
B
图12-9
4.在水平桌面上放一个重 的物体,现用如图1
2-9所示装置将物体匀速拉动,物体与桌面的摩擦力
是 ,不考虑绳重、滑轮自重以及滑轮与绳间的摩
0.2
擦,则水平拉力为____。若绳子自由端移动的速度为 ,则物体
移动的速度为____ 。
重难点3 机械效率的计算
1.机械效率的计算公式:,其中 。
2.杠杆的机械效率: ,额外功是克服杠杆本身的重力
做的功。
3.斜面的机械效率: ,额外功是克服物体与斜面之间
的摩擦力做的功, 。
4.滑轮组的机械效率
(1)一般情况: ,额外功是克服动滑轮的
重力、机械之间的摩擦力和绳子的重力做的功。
(2)忽略绳重和摩擦: ,额
外功是克服动滑轮的重力做的功 ,此时机械效率与绕绳方
式无关。
(3)注意:滑轮组的有用功是动滑轮与物体连接的绳子上的拉力
所做的功,该拉力不一定是用来克服重力或摩擦力做功(如打捞水下物
体的情形);做题时要注意明确是哪个力做有用功,哪个力做额外功,
哪个力做总功。
5.理解:机械效率是有用功与总功之比,机械效率与功率没有直接
联系,机械效率大不代表功率大或做功多。
图12-10
例4 如图12-10所示,建筑工人用滑轮组在 的时间内
将重为的物体匀速提升,所用的拉力为 。
求这个过程中:
(1)工人做的有用功;
(2)拉力的功率;
(3)滑轮组的机械效率。
分析本题考查滑轮组的功、功率和机械效率的相关计算,要注意确定哪个力做的是有用功,哪个力做的是总功,然后根据滑轮组的特点进行分析求解。
(1)克服物体重力做的功是有用功,已知物体所受的重力及其上升的高度,可根据 直接计算有用功。
(2)拉力做的功是总功,求拉力的功率要用公式 ,已知做功时间,要先求出 ;已知拉力,由 算出绳子自由端移动的距离即可得解。
(3)求滑轮组的机械效率要用公式 ,直接将前面已求出有用功和总功的数值代入公式计算即可。
图12-10
解: (1) 有用为
(2)承担物重的绳子段数 ,则绳子自由端移动
的距离为
拉力做的功是总功,总功为
拉力做功的功率为
(3)滑轮组的机械效率为
图12-10
针对训练
图12-11
5.两个滑轮按图12-11所示的方式组合,用的拉力
拉动绳端,使物体在内水平向左匀速滑动 ,物
体与地面间的摩擦力为 。下列说法正确的是
( )
A.是定滑轮,是动滑轮 B.拉力做的功为
C.拉力的功率为 D.滑轮组的机械效率为
图12-11
【提示】滑轮随物体一起运动,为动滑轮; 滑轮
的轴固定不动,为定滑轮。由图知, ,拉力端
移动距离 ,拉力做功
。拉力的功率 。拉力
克服地面摩擦做的功为有用功 ,滑轮组的机
械效率 ,故选项D正确。
针对训练
图12-11
5.两个滑轮按图12-11所示的方式组合,用的拉力
拉动绳端,使物体在内水平向左匀速滑动 ,物
体与地面间的摩擦力为 。下列说法正确的是
( )
A.是定滑轮,是动滑轮 B.拉力做的功为
C.拉力的功率为 D.滑轮组的机械效率为
D
6.港珠澳大桥是中国第一条集桥、双人工岛、隧道为一体的跨海通道,
其中长约 的沉管隧道通过引桥与人工岛路面相连,引桥长约
,竖直高度为,其简化图如图12-12所示。重 的
汽车在沉管隧道中以的速度匀速行驶,所受阻力为其重力的 。
某汽车从引桥底端开始匀速爬升,其功率增大到,耗时 到达
人工岛路面,求:
图12-12
(1)该汽车完全通过沉管
隧道需的时间;
(2)该汽车在沉管隧道中行驶时,牵引力所做的功;
(3)该汽车在引桥上所受阻力的大小;(已知牵引力所做的功一部分
用于克服重力,剩下的用于克服摩擦阻力)
图12-12
(4)引桥对于该汽车的机械效率。
图12-12
解:(1)沉管隧道中汽车速度,则由 得
汽车完全通过沉管隧道需要的时间为
(2)汽车在沉管隧道中所受阻力大小为
因为汽车做匀速直线运动,所以汽车所受牵引力为
则汽车在沉管隧道中行驶时,牵引力所做的功为
图12-12
(3)汽车在引桥上行驶时功率,根据
可得牵引力所做的功为
克服重力做功为
则阻力做功为
由 得汽车在引桥上所受阻力的大小为
图12-12
(4)汽车从引桥底端到顶端,所做有用功为克服重力做的功,即
总功为牵引力做功,即
所以引桥的机械效率为
全章复习 温故
实验突破
实验一 探究杠杆的平衡条件
实验 装置
实验 方法 (1)调节平衡螺母,使杠杆水平平衡
(2)在杠杆两侧挂上不同数量的钩码(每个钩码质量相同),
移动钩码的位置,使杠杆重新在水平位置平衡,记录动力 、阻
力、动力臂、阻力臂
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,重复做几次实验
续表
实验 方法 (4)在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹
簧测力计拉住杠杆的方法使杠杆平衡,记录、、、 的数
值
(5)将各组数据中的力与力臂进行相乘或相除,看看计算结果
有什么规律,进而归纳得出杠杆平衡的条件
续表
注意 事项 (1)实验前要调节平衡螺母,使杠杆水平平衡
(2)实验中不能调节平衡螺母
(3)为得到普遍性规律,须改变所悬挂钩码的数量和位置进行
多次测量
实验 结论 杠杆平衡的条件:动力×动力臂阻力×阻力臂,即
续表
评估 交流 (1)实验前调节杠杆水平平衡的目的:使杠杆的重心在支点
处,消除杠杆自重对实验的影响
(2)实验前调节杠杆水平平衡时,调节平衡螺母的方法:左高
左调、右高右调
(3)实验时使杠杆在水平位置静止,目的是便于测量力臂
续表
深入 拓展 (1)进行多次实验的目的是寻找普遍性规律
(2)杠杆在水平位置平衡时,若同时将两侧钩码悬点向外或向
内移动相同的距离,或同时取下左右两侧相同数量的钩码,可通
过“力与力臂乘积的变化量”来判断哪一侧下沉
(3)用弹簧测力计代替杠杆一侧所挂的钩码,当弹簧测力计由
竖直方向拉变成倾斜方向拉时,要使杠杆仍保持平衡,弹簧测力
计的示数会变大,这是因为拉力的力臂变小
续表
例1 在“探究杠杆平衡条件”的实验中:
图12-13
(1)如图12-13甲,把质量
分布均匀的杠杆中点 作为
支点,其目的是消除______
_____对实验的影响。为了
方便直接测出力臂,实验前
应先调节杠杆在水平位置平
衡,当在 处挂上钩码后杠杆转动,说明力能改变物体的__________。
图12-13
(2)图12-13乙中杠杆恰
好处于水平位置平衡,若
在 处下方再挂一个相同的
钩码,为使杠杆保持水平
平衡,需将挂在 处的钩码
向右移动___格。当杠杆平
衡、钩码静止时,挂在 处的钩码所受重力和钩码所受拉力是一对
______力。
图12-13
(3)如图12-13丙,小明
取下 处钩码,改用弹簧测
力计钩在 处,使杠杆再次
在水平位置平衡,弹簧测
计示数______(选填“大于”
“小于”或“等于”) (每
个钩码重 ),如果竖直向上拉动弹簧测力计,它是______(选填
“省力” “费力”或“等臂”)杠杆。
(4)小明经过多次实验,分析实验数据后得出了杠杆平衡条件:_____
______________________________________。
图12-13
图12-13
【解析】(1)把质量分布均匀的
杠杆中点置于支架上,调节
平衡螺母使杠杆的重心在支
点上,以消除杠杆自重对杠
杆平衡的影响;为了方便直
接读出力臂,实验前应先调
节杠杆在水平位置平衡;当在 处挂上钩码后杠杆转动,说明力能改变
物体的运动状态。
图12-13
【解析】(2)设一个钩码
重为 ,一格的长度
为 ;根据杠杆的平
衡条件可得
,
解得,故 处所
挂钩码须向右移动1
格;静止的钩码处于平衡状态,其受到的重力和受到的弹簧测力计的拉
力是一对平衡力。
图12-13
【解析】(3)题图丙中,小明取
下 处钩码,改用弹簧测力
计钩在 处,使杠杆再次在
水平位置平衡,根据杠杆的
平衡条件,若竖直向上拉动,
则弹簧测计示数为
,由于弹簧测力计拉力的力臂小于 ,
故大于 ;若竖直向上拉动弹簧测力计,则此时弹簧测力计力的力臂
大于钩码的力臂,故为省力杠杆。
【解析】(4)杠杆的平衡条件为“动力×动力臂 阻力×阻力臂(或
)”。
例1 在“探究杠杆平衡条件”的实验中:
图12-13
(1)如图12-13甲,把质量分布均匀的杠杆中
点 作为支点,其目的是消
除___________对实验的影
响。为了方便直接测出力臂,
实验前应先调节杠杆在水平
位置平衡,当在 处挂上钩
码后杠杆转动,说明力能改变物体的__________。
杠杆自重
运动状态
图12-13
(2)图12-13乙中杠杆恰
好处于水平位置平衡,若
在 处下方再挂一个相同的
钩码,为使杠杆保持水平
平衡,需将挂在 处的钩码
向右移动___格。当杠杆平
衡、钩码静止时,挂在 处的钩码所受重力和钩码所受拉力是一对
______力。
1
平衡
图12-13
(3)如图12-13丙,小明
取下 处钩码,改用弹簧测
力计钩在 处,使杠杆再次
在水平位置平衡,弹簧测
计示数______(选填“大于”
“小于”或“等于”) (每
个钩码重 ),如果竖直向上拉动弹簧测力计,它是______(选填
“省力” “费力”或“等臂”)杠杆。
大于
省力
(4)小明经过多次实验,分析实验数据后得出了杠杆平衡条件:
___________________________________________。
图12-13
动力×动力臂阻力×阻力臂(或 )
拓展考问
1.在“探究杠杆平衡条件”的实验中:
(1)挂钩码前,杠杆倾斜且静止,此时杠杆处于平衡状态,接下来调
节杠杆两端的螺母,使杠杆处于______________。
水平位置平衡
(2)图12-13乙中,若同时将杠杆两侧悬挂钩码的位置向外移一格,则
杠杆____端下沉;若同时在杠杆左右两侧的钩码下加挂一个钩码,则杠
杆____端下沉。(均选填“左”或“右”)
左
右
(3)探究中进行多次实验的目的是________________。
寻找普遍性规律
实验二 测量滑轮组的机械效率
实验 装置
实验 方法 实验原理:。应测物理量有钩码重力 、钩码提升
的高度、拉力、绳子自由端移动的距离
注意 事项 必须匀速拉动弹簧测力计使钩码升高,目的是保证弹簧测力计
示数稳定
实验 结论 (1)同一个滑轮组,所提升物体的重力越大,机械效率越高
(2)不同滑轮组,所提升物体的重力相等时,动滑轮的重力越
小,机械效率越高
(3)滑轮组的机械效率与绕线方式和提升重物的高度无关
续表
评估 交流 (1)若绳子自由端与动滑轮连接,则须匀速竖直拉动弹簧测力
计;若绳子自由端与定滑轮连接,则匀速拉动弹簧测力计即
可,无须竖直拉动
(2)实验误差的主要来源:弹簧测力计的示数不稳定(难以保
证匀速拉动)
续表
深入 拓展 (1)影响滑轮组机械效率的主要因素有物体的重力、动滑轮的
重力、滑轮与绳间的摩擦;提高滑轮组机械效率的方法主要有
增加所提升物体的重力、减小动滑轮的重力、减小摩擦
(2)实验改进:在原来的实验装置中,使绳子自由端跨过定滑
轮拉重物(如图丙所示)。优点:可改变绳子自由端的拉力方
向,且拉力不必沿竖直方向
续表
例2 同学们在探究“影响滑轮组机械效率高低的因素”时提出了下列猜想:
猜想一:滑轮组机械效率可能与动滑轮重有关;
猜想二:滑轮组机械效率可能与被提物重有关;
猜想三:滑轮组机械效率可能与物体提升高度有关;
猜想四:滑轮组机械效率可能与承重绳子段数有关。
一名同学设计了如图12-14所示的四个滑轮组,并将所测实验数据填入下表:
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(1)在表中填上第④次实验的对应的承重绳子段数和机械效率 的数值。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(2)根据实验____和____(填序号)可知,滑轮组机械效率与被提物重有关。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(3)根据实验②和④可知,滑轮组的机械效率与______________无关。
图12-14
(4)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,机械效率越____。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
图12-14
(5)要研究滑轮组机械效率是否与物
体提升高度有关,应该选用______
(选填“同一”或“不同”)滑轮组,使
物体提升______(选填“相同”或“不
同”)的高度。
【解析】(1)由图④知承重绳子段数为,
根据 得第④组实验数据对应的机械效率为
。
(2)要探究机械效率与物重的关系,须保持动滑轮重及绕线方式相同,
同时使被提升物体的重力不同,故应根据实验①和②进行分析。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(3)实验②和④中,动滑轮的重力相同,被提升物体的重力相同,但承重绳子段数不同,而滑轮组机械效率近似相等,据此可知滑轮组机械效率与承重绳子段数无关。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(4)根据实验②和③可知,提升相同的重物,动滑轮越重,滑轮组的机械效率越小。
图12-14
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
【解析】(5)要探究机械效率与物体被提升的高度之间的关系,应保持其他因素相同,而提升的高度不同。故应选用同一滑轮组,使物体提升不同的高度。
图12-14
(1)在表中填上第④次实验的对应的承重绳子段数和机械效率 的数值。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
2
80%
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(2)根据实验____和____(填序号)可知,滑轮组机械效率与被提物重有关。
图12-14
①
②
2
80%
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
(3)根据实验②和④可知,滑轮组的机械效率与______________无关。
图12-14
承重绳子段数
2
80%
(4)通过实验可以发现,不同滑轮组提升相同重物时,动滑轮越重,机械效率越____。
实验 次数 动滑轮重 物重 拉力 承重绳子段数 机械效率
① 1 2 1 3 66.7
② 1 4 1.67 3 79.8
③ 2 4 2 3 66.7
④ 1 4 2.5
图12-14
小
2
80%
图12-14
(5)要研究滑轮组机械效率是否与物
体提升高度有关,应该选用______
(选填“同一”或“不同”)滑轮组,使
物体提升______(选填“相同”或“不
同”)的高度。
同一
不同
拓展考问
图12-15
2.小林在“测量滑轮组的机械效率”
的实验中的操作情况如图12-15甲、
乙、丙所示。
(1)实验中要竖直向上______拉动
弹簧测力计,使物休升高。
匀速
(2)在图12-15丙所示实验中,若将
滑轮组换一种绕绳方法,不计摩擦及
绳重,提升相同的物体时,滑轮组的机
械效率______ (选填“变大”“不变”
或“变小”)。
不变
图12-15
(3)小林与其他同学交流时发现,
有一个小组的滑轮组组装方式如图
12-15丁所示,其优点是___________
________________。
可沿任意方
向匀速拉动绳子