2.4.1 圆的标准方程 课时练习(含解析)高中数学人教A版(2019)选择性必修 第一册
文档属性
| 名称 | 2.4.1 圆的标准方程 课时练习(含解析)高中数学人教A版(2019)选择性必修 第一册 |
|
|
| 格式 | docx | ||
| 文件大小 | 55.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教A版(2019) | ||
| 科目 | 数学 | ||
| 更新时间 | 2024-06-03 00:00:00 | ||
图片预览

文档简介
2.4 圆 的 方 程
2.4.1 圆的标准方程
一、 单项选择题
1 (2023乐山期末)已知圆C的圆心在x轴上,且经过A(1,1),B(2,-2)两点,则圆C的标准方程是( )
A. (x-3)2+y2=5
B. (x-3)2+y2=17
C. (x+3)2+y2=17
D. x2+(y+1)2=5
2 若方程x2+y2-2+a=0表示两个半径分别为r,2r(r>0)的圆,则实数a的值为( )
A. 1 B. 3 C. D.
3 (2024黄山期末)已知圆M:(x-2)2+(y-1)2=1与圆N关于直线x-y=0对称,则圆N的方程为( )
A. (x+1)2+(y+2)2=1
B. (x-2)2+(y+1)2=1
C. (x+2)2+(y+1)2=1
D. (x-1)2+(y-2)2=1
4 曲线y=(a≠0)与x轴围成的封闭图形的面积为( )
A. a2 B. a2
C. a2π D. a2π
5 已知△ABC的外接圆M经过点(0,1),(0,3),且圆心M在直线y=x上.若△ABC的边BC=2,则sin ∠BAC的值为( )
A. B. C. D.
6 若三角形的三边所在直线的方程分别为x-y=0,x-3y=0,3x-y-8=0,则能够覆盖此三角形且面积最小的圆的标准方程为( )
A. +=
B. +=25
C. (x-2)2+(y-2)2=8
D. (x-2)2+(y-2)2=32
二、 多项选择题
7 已知三角形的三个顶点分别为O(0,0),M(1,1),N(4,2),则下列结论中正确的是( )
A. △OMN外接圆的方程为(x-4)2+(y+3)2=25
B. △OMN外接圆的半径长为5
C. △OMN外接圆的圆心坐标为(4,-3)
D. MN大于△OMN外接圆的半径
8 过四点(0,0),(4,0),(-1,1),(4,2)中的三点的圆的方程为( )
A. (x-2)2+(y-3)2=13
B. (x-2)2+(y-1)2=5
C. +(y-1)2=
D. +=
三、 填空题
9 在平面直角坐标系中,已知点A(-4,2)是Rt△OAB的直角顶点,O是坐标原点,点B在x轴上,则△OAB的外接圆的方程是______________.
10 已知点P1(x1,y1)在圆x2+y2=1上,点P2(x2,y2)在曲线xy=1上,则(x1-x2)2+(y1-y2)2的最小值为________.
11 (2023全国专题练习)已知x,y满足(x-1)2+(y-2)2=16,则x2+y2的取值范围是________.
四、 解答题
12 (2024南阳期末)已知直线l1:2x+y-9=0,l2:mx-y+3-m=0过定点A.
(1) 求点A的坐标;
(2) 当m=2时,l1与l2的交点为B,求以AB为直径的圆的标准方程.
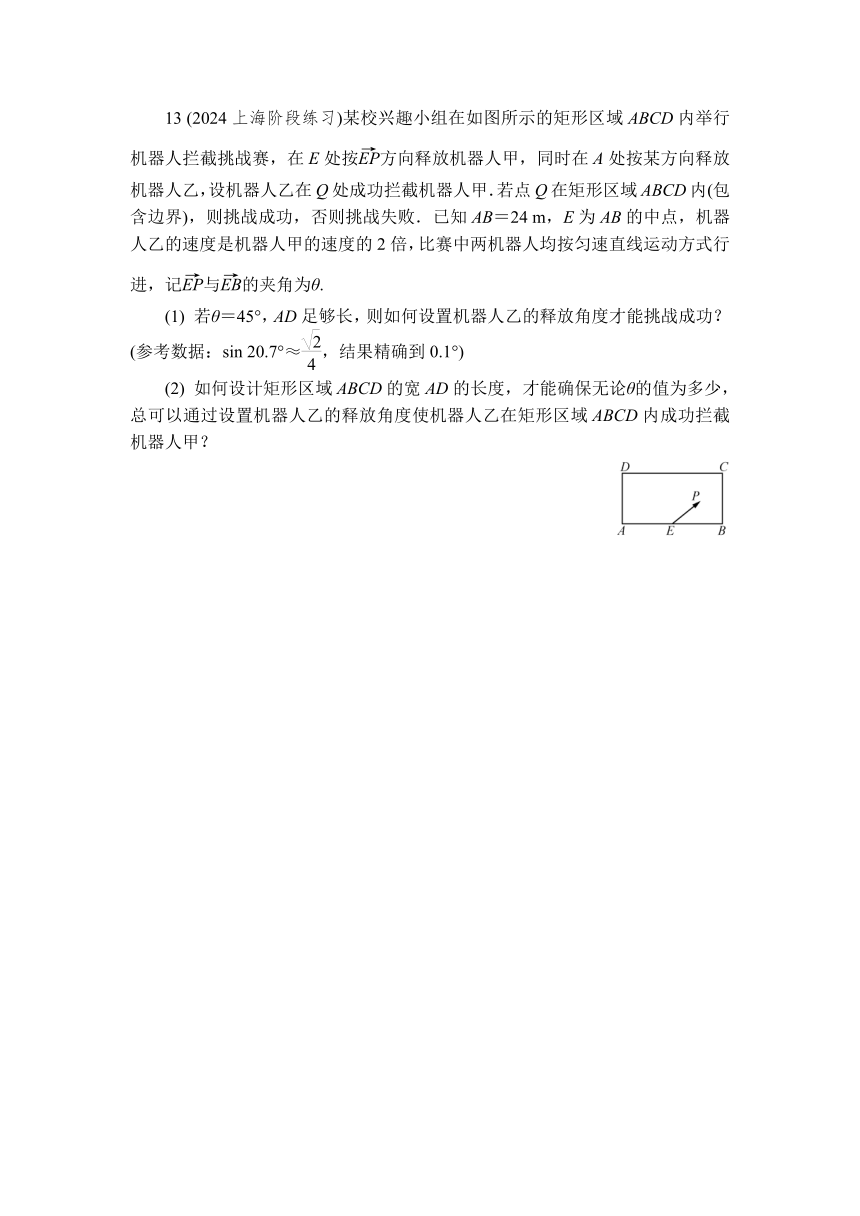
13 (2024上海阶段练习)某校兴趣小组在如图所示的矩形区域ABCD内举行机器人拦截挑战赛,在E处按方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.已知AB=24 m,E为AB的中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与的夹角为θ.
(1) 若θ=45°,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(参考数据:sin 20.7°≈,结果精确到0.1°)
(2) 如何设计矩形区域ABCD的宽AD的长度,才能确保无论θ的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
【答案解析】
2.4 圆 的 方 程
2.4.1 圆的标准方程
1. A 因为圆C的圆心在x轴上,故设圆的标准方程为(x-a)2+y2=r2(r>0).又圆C经过A(1,1),B(2,-2)两点,所以解得所以圆C的标准方程为(x-3)2+y2=5.
2. C 由题意,得x2+y2-2+a=(-r)(-2r)=0,所以r+2r=2,即r=,则a=r·2r=.
3. D 由题意,得圆M:(x-2)2+(y-1)2=1的圆心为(2,1),半径为1.又易知点(2,1)关于直线x-y=0的对称点是(1,2),所以圆N的圆心是(1,2),半径是1,即圆N的方程为(x-1)2+(y-2)2=1.
4. D 由y=,得(x-a)2+y2=a2(y≥0),所以曲线y= (a≠0)与x轴围成的封闭图形是以(a,0)为圆心,半径为|a|的上半圆,其面积为a2π.
5. A 设点M的坐标为(x,y),半径为R.因为圆M经过点(0,1),(0,3),所以圆心在直线y=2上.又圆心在直线y=x上,所以x=2,则圆心M的坐标为(2,2),R==,所以=2R=2,所以sin ∠BAC=.
6. C 由题意,得该三角形的三个顶点的坐标分别是(0,0),(4,4),(3,1),易知此三角形为钝角三角形,故所求圆的方程是以最长边为直径的圆的方程. 又最长边的两个端点的坐标分别为(0,0),(4,4),所以所求圆的圆心为(2,2),半径为×=2,故所求圆的标准方程为(x-2)2+(y-2)2=8.
7. ABC 由题意,得OM的中点E,MN的中点 F,则OM的垂直平分线PE的方程为y-=-①,MN的垂直平分线PF的方程为y-=-3②.联立①②,得解得则P(4,-3)为PE,PF的交点,即为圆心,OP=5,即为圆的半径,所以圆的方程为(x-4)2+(y+3)2=25,MN==<5.故选ABC.
8. ABC 设圆的方程为(x-a)2+(y-b)2=r2,当圆过(0,0),(4,0),(-1,1)三点时,则解得所以圆的方程为(x-2)2+(y-3)2=13;当圆过(0,0),(4,0),(4,2)三点时,则解得所以圆的方程为(x-2)2+(y-1)2=5;当圆过(0,0),(-1,1),(4,2)三点时,则解得所以圆的方程为+=;当圆过(4,0),(-1,1),(4,2)三点时,则解得所以圆的方程为+(y-1)2=.故选ABC.
9. +y2= 因为A(-4,2)是Rt△OAB的直角顶点,所以OA⊥AB.又kOA==-,所以kAB=2,所以直线AB的方程为y-2=2(x+4),所以B(-5,0).因为△OAB的外接圆是以线段OB的中点为圆心,OB长为半径的圆,又OB的中点坐标为,OB=,所以所求外接圆的方程是+y2=.
10. 3-2 由题意,得(x1-x2)2+(y1-y2)2的最小值就是曲线xy=1和圆x2+y2=1上点的最小距离的平方.如图,由对称性可知,不妨设点P1(x,)(x>0),则P1O=≥,当且仅当x=1时等号成立,即当点P1的坐标为(1,1)时,点P1距离圆心O最近,此时P1O=,即(x1-x2)2+(y1-y2)2的最小值为(-1)2=3-2.
11. [21-8,21+8] x2+y2表示圆C:(x-1)2+(y-2)2=16上的动点P(x,y)与原点O(0,0)的距离d的平方.因为圆C:(x-1)2+(y-2)2=16的圆心C(1,2),半径r=4,所以OC==.因为r-OC≤d≤r+OC,所以4-≤d≤4+,则21-8≤d2≤21+8,即21-8≤x2+y2≤21+8,所以x2+y2的取值范围为[21-8,21+8].
12. (1) 直线l2:mx-y+3-m=0可化为m(x-1)-y+3=0,
令解得
所以直线l2过定点A(1,3).
(2) 当m=2时,l2:2x-y+1=0,
联立解得即B(2,5).
因为A(1,3),所以线段AB的中点,即圆心C的坐标为,
所以r2=AC2=+(4-3)2=,
故以AB为直径的圆的标准方程为+(y-4)2=.
13. (1) 由题意,得AQ=2EQ,∠AEQ=135°,
在△AEQ中,由正弦定理,得=,
则sin ∠QAE=×sin ∠AEQ=sin 135°=,
所以∠QAE≈20.7°,
所以应在矩形区域ABCD内,按照与夹角为20.7°的方向释放机器人乙,才能挑战成功.
(2) 以AB所在直线为x轴,AB的中垂线为y轴,建立如图所示的平面直角坐标系,则A(-12,0),E(0,0).
设Q(x,y)(y≥0),由题意,得AQ=2EQ,
所以=2,
化简,得(x-4)2+y2=64(y≥0),
即点Q的轨迹是以(4,0)为圆心,8为半径的上半圆在矩形区域ABCD内的部分,
所以当AD≥8 m时,能确保无论θ的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲.
2.4.1 圆的标准方程
一、 单项选择题
1 (2023乐山期末)已知圆C的圆心在x轴上,且经过A(1,1),B(2,-2)两点,则圆C的标准方程是( )
A. (x-3)2+y2=5
B. (x-3)2+y2=17
C. (x+3)2+y2=17
D. x2+(y+1)2=5
2 若方程x2+y2-2+a=0表示两个半径分别为r,2r(r>0)的圆,则实数a的值为( )
A. 1 B. 3 C. D.
3 (2024黄山期末)已知圆M:(x-2)2+(y-1)2=1与圆N关于直线x-y=0对称,则圆N的方程为( )
A. (x+1)2+(y+2)2=1
B. (x-2)2+(y+1)2=1
C. (x+2)2+(y+1)2=1
D. (x-1)2+(y-2)2=1
4 曲线y=(a≠0)与x轴围成的封闭图形的面积为( )
A. a2 B. a2
C. a2π D. a2π
5 已知△ABC的外接圆M经过点(0,1),(0,3),且圆心M在直线y=x上.若△ABC的边BC=2,则sin ∠BAC的值为( )
A. B. C. D.
6 若三角形的三边所在直线的方程分别为x-y=0,x-3y=0,3x-y-8=0,则能够覆盖此三角形且面积最小的圆的标准方程为( )
A. +=
B. +=25
C. (x-2)2+(y-2)2=8
D. (x-2)2+(y-2)2=32
二、 多项选择题
7 已知三角形的三个顶点分别为O(0,0),M(1,1),N(4,2),则下列结论中正确的是( )
A. △OMN外接圆的方程为(x-4)2+(y+3)2=25
B. △OMN外接圆的半径长为5
C. △OMN外接圆的圆心坐标为(4,-3)
D. MN大于△OMN外接圆的半径
8 过四点(0,0),(4,0),(-1,1),(4,2)中的三点的圆的方程为( )
A. (x-2)2+(y-3)2=13
B. (x-2)2+(y-1)2=5
C. +(y-1)2=
D. +=
三、 填空题
9 在平面直角坐标系中,已知点A(-4,2)是Rt△OAB的直角顶点,O是坐标原点,点B在x轴上,则△OAB的外接圆的方程是______________.
10 已知点P1(x1,y1)在圆x2+y2=1上,点P2(x2,y2)在曲线xy=1上,则(x1-x2)2+(y1-y2)2的最小值为________.
11 (2023全国专题练习)已知x,y满足(x-1)2+(y-2)2=16,则x2+y2的取值范围是________.
四、 解答题
12 (2024南阳期末)已知直线l1:2x+y-9=0,l2:mx-y+3-m=0过定点A.
(1) 求点A的坐标;
(2) 当m=2时,l1与l2的交点为B,求以AB为直径的圆的标准方程.
13 (2024上海阶段练习)某校兴趣小组在如图所示的矩形区域ABCD内举行机器人拦截挑战赛,在E处按方向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.已知AB=24 m,E为AB的中点,机器人乙的速度是机器人甲的速度的2倍,比赛中两机器人均按匀速直线运动方式行进,记与的夹角为θ.
(1) 若θ=45°,AD足够长,则如何设置机器人乙的释放角度才能挑战成功?(参考数据:sin 20.7°≈,结果精确到0.1°)
(2) 如何设计矩形区域ABCD的宽AD的长度,才能确保无论θ的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲?
【答案解析】
2.4 圆 的 方 程
2.4.1 圆的标准方程
1. A 因为圆C的圆心在x轴上,故设圆的标准方程为(x-a)2+y2=r2(r>0).又圆C经过A(1,1),B(2,-2)两点,所以解得所以圆C的标准方程为(x-3)2+y2=5.
2. C 由题意,得x2+y2-2+a=(-r)(-2r)=0,所以r+2r=2,即r=,则a=r·2r=.
3. D 由题意,得圆M:(x-2)2+(y-1)2=1的圆心为(2,1),半径为1.又易知点(2,1)关于直线x-y=0的对称点是(1,2),所以圆N的圆心是(1,2),半径是1,即圆N的方程为(x-1)2+(y-2)2=1.
4. D 由y=,得(x-a)2+y2=a2(y≥0),所以曲线y= (a≠0)与x轴围成的封闭图形是以(a,0)为圆心,半径为|a|的上半圆,其面积为a2π.
5. A 设点M的坐标为(x,y),半径为R.因为圆M经过点(0,1),(0,3),所以圆心在直线y=2上.又圆心在直线y=x上,所以x=2,则圆心M的坐标为(2,2),R==,所以=2R=2,所以sin ∠BAC=.
6. C 由题意,得该三角形的三个顶点的坐标分别是(0,0),(4,4),(3,1),易知此三角形为钝角三角形,故所求圆的方程是以最长边为直径的圆的方程. 又最长边的两个端点的坐标分别为(0,0),(4,4),所以所求圆的圆心为(2,2),半径为×=2,故所求圆的标准方程为(x-2)2+(y-2)2=8.
7. ABC 由题意,得OM的中点E,MN的中点 F,则OM的垂直平分线PE的方程为y-=-①,MN的垂直平分线PF的方程为y-=-3②.联立①②,得解得则P(4,-3)为PE,PF的交点,即为圆心,OP=5,即为圆的半径,所以圆的方程为(x-4)2+(y+3)2=25,MN==<5.故选ABC.
8. ABC 设圆的方程为(x-a)2+(y-b)2=r2,当圆过(0,0),(4,0),(-1,1)三点时,则解得所以圆的方程为(x-2)2+(y-3)2=13;当圆过(0,0),(4,0),(4,2)三点时,则解得所以圆的方程为(x-2)2+(y-1)2=5;当圆过(0,0),(-1,1),(4,2)三点时,则解得所以圆的方程为+=;当圆过(4,0),(-1,1),(4,2)三点时,则解得所以圆的方程为+(y-1)2=.故选ABC.
9. +y2= 因为A(-4,2)是Rt△OAB的直角顶点,所以OA⊥AB.又kOA==-,所以kAB=2,所以直线AB的方程为y-2=2(x+4),所以B(-5,0).因为△OAB的外接圆是以线段OB的中点为圆心,OB长为半径的圆,又OB的中点坐标为,OB=,所以所求外接圆的方程是+y2=.
10. 3-2 由题意,得(x1-x2)2+(y1-y2)2的最小值就是曲线xy=1和圆x2+y2=1上点的最小距离的平方.如图,由对称性可知,不妨设点P1(x,)(x>0),则P1O=≥,当且仅当x=1时等号成立,即当点P1的坐标为(1,1)时,点P1距离圆心O最近,此时P1O=,即(x1-x2)2+(y1-y2)2的最小值为(-1)2=3-2.
11. [21-8,21+8] x2+y2表示圆C:(x-1)2+(y-2)2=16上的动点P(x,y)与原点O(0,0)的距离d的平方.因为圆C:(x-1)2+(y-2)2=16的圆心C(1,2),半径r=4,所以OC==.因为r-OC≤d≤r+OC,所以4-≤d≤4+,则21-8≤d2≤21+8,即21-8≤x2+y2≤21+8,所以x2+y2的取值范围为[21-8,21+8].
12. (1) 直线l2:mx-y+3-m=0可化为m(x-1)-y+3=0,
令解得
所以直线l2过定点A(1,3).
(2) 当m=2时,l2:2x-y+1=0,
联立解得即B(2,5).
因为A(1,3),所以线段AB的中点,即圆心C的坐标为,
所以r2=AC2=+(4-3)2=,
故以AB为直径的圆的标准方程为+(y-4)2=.
13. (1) 由题意,得AQ=2EQ,∠AEQ=135°,
在△AEQ中,由正弦定理,得=,
则sin ∠QAE=×sin ∠AEQ=sin 135°=,
所以∠QAE≈20.7°,
所以应在矩形区域ABCD内,按照与夹角为20.7°的方向释放机器人乙,才能挑战成功.
(2) 以AB所在直线为x轴,AB的中垂线为y轴,建立如图所示的平面直角坐标系,则A(-12,0),E(0,0).
设Q(x,y)(y≥0),由题意,得AQ=2EQ,
所以=2,
化简,得(x-4)2+y2=64(y≥0),
即点Q的轨迹是以(4,0)为圆心,8为半径的上半圆在矩形区域ABCD内的部分,
所以当AD≥8 m时,能确保无论θ的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形区域ABCD内成功拦截机器人甲.