2025人教版高中物理选择性必修第一册同步练习题(有解析)--专题强化练3 人船模型
文档属性
| 名称 | 2025人教版高中物理选择性必修第一册同步练习题(有解析)--专题强化练3 人船模型 |
|
|
| 格式 | docx | ||
| 文件大小 | 411.5KB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 人教版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-06-04 00:00:00 | ||
图片预览

文档简介
中小学教育资源及组卷应用平台
2025人教版高中物理选择性必修第一册
专题强化练3 人船模型
一、选择题
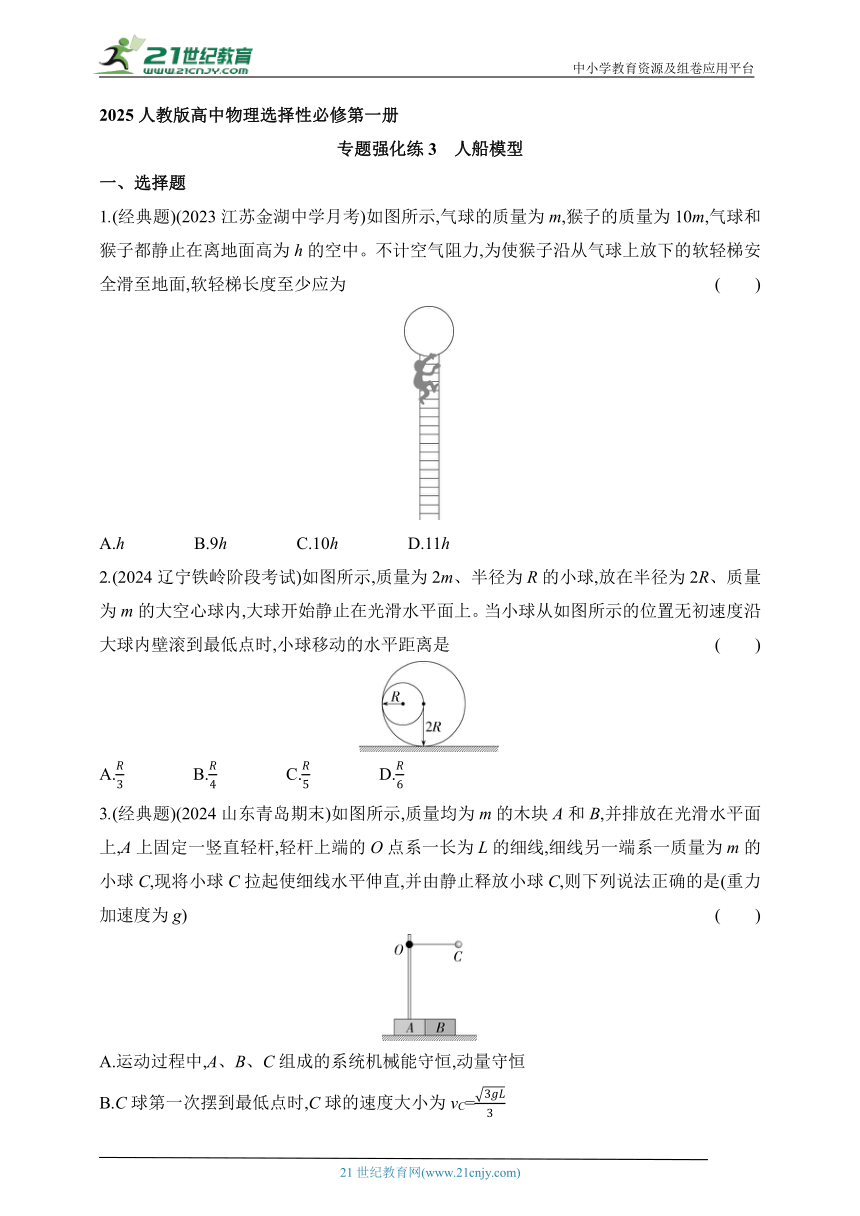
1.(经典题)(2023江苏金湖中学月考)如图所示,气球的质量为m,猴子的质量为10m,气球和猴子都静止在离地面高为h的空中。不计空气阻力,为使猴子沿从气球上放下的软轻梯安全滑至地面,软轻梯长度至少应为 ( )
A.h B.9h C.10h D.11h
2.(2024辽宁铁岭阶段考试)如图所示,质量为2m、半径为R的小球,放在半径为2R、质量为m的大空心球内,大球开始静止在光滑水平面上。当小球从如图所示的位置无初速度沿大球内壁滚到最低点时,小球移动的水平距离是 ( )
A. B. C. D.
3.(经典题)(2024山东青岛期末)如图所示,质量均为m的木块A和B,并排放在光滑水平面上,A上固定一竖直轻杆,轻杆上端的O点系一长为L的细线,细线另一端系一质量为m的小球C,现将小球C拉起使细线水平伸直,并由静止释放小球C,则下列说法正确的是(重力加速度为g) ( )
A.运动过程中,A、B、C组成的系统机械能守恒,动量守恒
B.C球第一次摆到最低点时,C球的速度大小为vC=
C.C球第一次摆到最低点过程中,木块A、B向右移动的距离为L
D.C球向左运动能到达的最高点与C球运动过程中轨迹的最低点间的高度差为L
4.(经典题)(多选题)(2022江苏泰州中学月考)如图所示,质量为m的半圆轨道小车静止在光滑的水平地面上,其水平直径AB长度为2R。现将质量也为m的小球从A点正上方h高处由静止释放,小球由A点经过半圆轨道后从B点冲出,在空中能上升的最大高度为h(不计空气阻力),则下列说法正确的是 ( )
A.小球和小车组成的系统在水平方向上动量守恒
B.小车向左运动的最大距离为R
C.小球离开小车后做斜上抛运动
D.小球第二次能上升的最大高度h1满足h二、非选择题
5.(2023辽宁营口期末)如图所示,带有四分之一光滑圆弧轨道的滑块P静止在光滑水平地面上,其末端与水平地面相切。一小滑块Q从光滑圆弧轨道的最高点由静止释放,已知滑块P和滑块Q的质量均为m,圆弧轨道的半径为R,重力加速度大小为g,求:
(1)滑块Q刚离开P时,滑块P的位移大小;
(2)滑块Q滑到水平地面上时的速度大小;
(3)滑块Q在圆弧轨道上下滑的过程中,P对Q的支持力做的功。
答案与分层梯度式解析
专题强化练3 人船模型
1.D 思路点拨 猴子与气球组成的系统所受合外力为零,动量守恒且最初静止,属于“人船模型”。
猴子滑至地面时,设气球上升的高度为H,由人船模型规律有mH=10mh,解得H=10h,所以软轻梯长度至少为L=h+H=11h,D正确。
2.A 设小球移动的水平距离为s,由几何关系知大球运动的位移为R-s,系统在水平方向动量守恒,因此有2ms=m(R-s),解得s=R,选项A正确。
3.D 木块A、B和小球C组成的系统所受的合力不为零,所以系统的总动量不守恒,故A错误;C球从开始运动到第一次摆到最低点过程中,A、B、C组成的系统在水平方向动量守恒,以向左为正方向,由动量守恒定律得mvC-2mvA=0,由机械能守恒得mgL=m+·2m,解得vC=,故B错误;从C球开始运动到第一次摆到最低点过程有mxC=2mxA,xC+xA=L,所以木块A、B向右移动的距离为xA=,故C错误;小球C第一次下落到最低点时,A、B将要开始分离,当C向左运动到达最大高度时,A、C共速(破题关键),则有mvC-mvA=2mv共,m+m=·2m+mgh,解得h=L,故D正确。
4.ABD 小球与小车组成的系统在水平方向所受合外力为零,在水平方向系统动量守恒,A正确;以向右为正方向,在水平方向,由动量守恒定律有mv-mv'=0,得m-m=0,所以小车的位移x=R,B正确;小球与小车组成的系统在水平方向动量守恒,小球由B点离开小车时系统水平方向动量为零,小球与小车水平方向速度为零,小球离开小车后做竖直上抛运动(易错点),C错误;小球从开始下落到第一次上升至最高点的运动过程中,由动能定理得mg(h-h)-Wf=0,所以小球克服摩擦力做功大小Wf=mgh,即小球第一次在车中运动损失的机械能为mgh,由于小球第二次在车中运动时,对应位置处的速度变小,因此小车给小球的弹力变小,摩擦力变小,摩擦力做功小于mgh,机械能损失小于mgh,因此小球再次离开小车时,能上升的最大高度大于h-h=h,而且小于h,D正确。
5.答案 (1) (2) (3)-mgR
模型构建 滑块P、Q组成的系统水平方向不受外力,水平方向动量守恒。系统最初静止,属于“人船模型”。
速度表达式为0=mvP-mvQ,
位移表达式为0=mxP-mxQ,其中xP+xQ=R。
解析 (1)滑块P、Q组成的系统水平方向不受外力,水平方向动量守恒,根据动量守恒的位移表达式有
0=mxP-mxQ,且xP+xQ=R,解得xP=
(2)在水平方向,由动量守恒定律有0=mvP-mvQ
对系统由能量守恒定律有mgR=m+m
解得vQ=
(3)对滑块Q,由动能定理有mgR+W支=m,解得W支=-mgR
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)
2025人教版高中物理选择性必修第一册
专题强化练3 人船模型
一、选择题
1.(经典题)(2023江苏金湖中学月考)如图所示,气球的质量为m,猴子的质量为10m,气球和猴子都静止在离地面高为h的空中。不计空气阻力,为使猴子沿从气球上放下的软轻梯安全滑至地面,软轻梯长度至少应为 ( )
A.h B.9h C.10h D.11h
2.(2024辽宁铁岭阶段考试)如图所示,质量为2m、半径为R的小球,放在半径为2R、质量为m的大空心球内,大球开始静止在光滑水平面上。当小球从如图所示的位置无初速度沿大球内壁滚到最低点时,小球移动的水平距离是 ( )
A. B. C. D.
3.(经典题)(2024山东青岛期末)如图所示,质量均为m的木块A和B,并排放在光滑水平面上,A上固定一竖直轻杆,轻杆上端的O点系一长为L的细线,细线另一端系一质量为m的小球C,现将小球C拉起使细线水平伸直,并由静止释放小球C,则下列说法正确的是(重力加速度为g) ( )
A.运动过程中,A、B、C组成的系统机械能守恒,动量守恒
B.C球第一次摆到最低点时,C球的速度大小为vC=
C.C球第一次摆到最低点过程中,木块A、B向右移动的距离为L
D.C球向左运动能到达的最高点与C球运动过程中轨迹的最低点间的高度差为L
4.(经典题)(多选题)(2022江苏泰州中学月考)如图所示,质量为m的半圆轨道小车静止在光滑的水平地面上,其水平直径AB长度为2R。现将质量也为m的小球从A点正上方h高处由静止释放,小球由A点经过半圆轨道后从B点冲出,在空中能上升的最大高度为h(不计空气阻力),则下列说法正确的是 ( )
A.小球和小车组成的系统在水平方向上动量守恒
B.小车向左运动的最大距离为R
C.小球离开小车后做斜上抛运动
D.小球第二次能上升的最大高度h1满足h
5.(2023辽宁营口期末)如图所示,带有四分之一光滑圆弧轨道的滑块P静止在光滑水平地面上,其末端与水平地面相切。一小滑块Q从光滑圆弧轨道的最高点由静止释放,已知滑块P和滑块Q的质量均为m,圆弧轨道的半径为R,重力加速度大小为g,求:
(1)滑块Q刚离开P时,滑块P的位移大小;
(2)滑块Q滑到水平地面上时的速度大小;
(3)滑块Q在圆弧轨道上下滑的过程中,P对Q的支持力做的功。
答案与分层梯度式解析
专题强化练3 人船模型
1.D 思路点拨 猴子与气球组成的系统所受合外力为零,动量守恒且最初静止,属于“人船模型”。
猴子滑至地面时,设气球上升的高度为H,由人船模型规律有mH=10mh,解得H=10h,所以软轻梯长度至少为L=h+H=11h,D正确。
2.A 设小球移动的水平距离为s,由几何关系知大球运动的位移为R-s,系统在水平方向动量守恒,因此有2ms=m(R-s),解得s=R,选项A正确。
3.D 木块A、B和小球C组成的系统所受的合力不为零,所以系统的总动量不守恒,故A错误;C球从开始运动到第一次摆到最低点过程中,A、B、C组成的系统在水平方向动量守恒,以向左为正方向,由动量守恒定律得mvC-2mvA=0,由机械能守恒得mgL=m+·2m,解得vC=,故B错误;从C球开始运动到第一次摆到最低点过程有mxC=2mxA,xC+xA=L,所以木块A、B向右移动的距离为xA=,故C错误;小球C第一次下落到最低点时,A、B将要开始分离,当C向左运动到达最大高度时,A、C共速(破题关键),则有mvC-mvA=2mv共,m+m=·2m+mgh,解得h=L,故D正确。
4.ABD 小球与小车组成的系统在水平方向所受合外力为零,在水平方向系统动量守恒,A正确;以向右为正方向,在水平方向,由动量守恒定律有mv-mv'=0,得m-m=0,所以小车的位移x=R,B正确;小球与小车组成的系统在水平方向动量守恒,小球由B点离开小车时系统水平方向动量为零,小球与小车水平方向速度为零,小球离开小车后做竖直上抛运动(易错点),C错误;小球从开始下落到第一次上升至最高点的运动过程中,由动能定理得mg(h-h)-Wf=0,所以小球克服摩擦力做功大小Wf=mgh,即小球第一次在车中运动损失的机械能为mgh,由于小球第二次在车中运动时,对应位置处的速度变小,因此小车给小球的弹力变小,摩擦力变小,摩擦力做功小于mgh,机械能损失小于mgh,因此小球再次离开小车时,能上升的最大高度大于h-h=h,而且小于h,D正确。
5.答案 (1) (2) (3)-mgR
模型构建 滑块P、Q组成的系统水平方向不受外力,水平方向动量守恒。系统最初静止,属于“人船模型”。
速度表达式为0=mvP-mvQ,
位移表达式为0=mxP-mxQ,其中xP+xQ=R。
解析 (1)滑块P、Q组成的系统水平方向不受外力,水平方向动量守恒,根据动量守恒的位移表达式有
0=mxP-mxQ,且xP+xQ=R,解得xP=
(2)在水平方向,由动量守恒定律有0=mvP-mvQ
对系统由能量守恒定律有mgR=m+m
解得vQ=
(3)对滑块Q,由动能定理有mgR+W支=m,解得W支=-mgR
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)