专题二相互作用2课件2025高考物理复习专题(共48张PPT)
文档属性
| 名称 | 专题二相互作用2课件2025高考物理复习专题(共48张PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 1.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-07-17 17:20:56 | ||
图片预览




文档简介
(共48张PPT)
体系透视
考点透析
实验微专题
目 录
考点1 常见的三种力 力的合成与分解
考点2 受力分析 共点力的平衡
实验微专题2 探究弹簧弹力与形变量的关系
实验微专题3 探究两个互成角度的力的合成规律
题型透悟
题型1 动态平衡问题
题型2 平衡中的临界值问题
考点1 常见的三种力 力的合成与分解
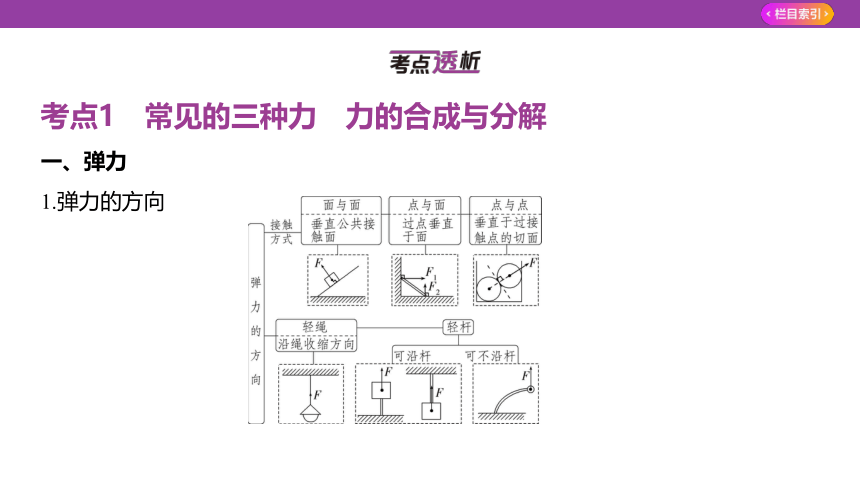
一、弹力
1.弹力的方向
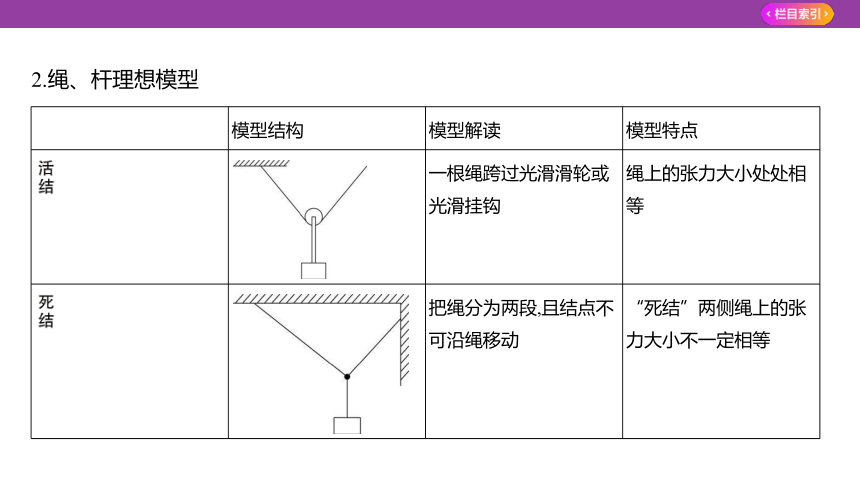
2.绳、杆理想模型
模型结构 模型解读 模型特点
一根绳跨过光滑滑轮或
光滑挂钩 绳上的张力大小处处相
等
把绳分为两段,且结点不
可沿绳移动 “死结”两侧绳上的张
力大小不一定相等
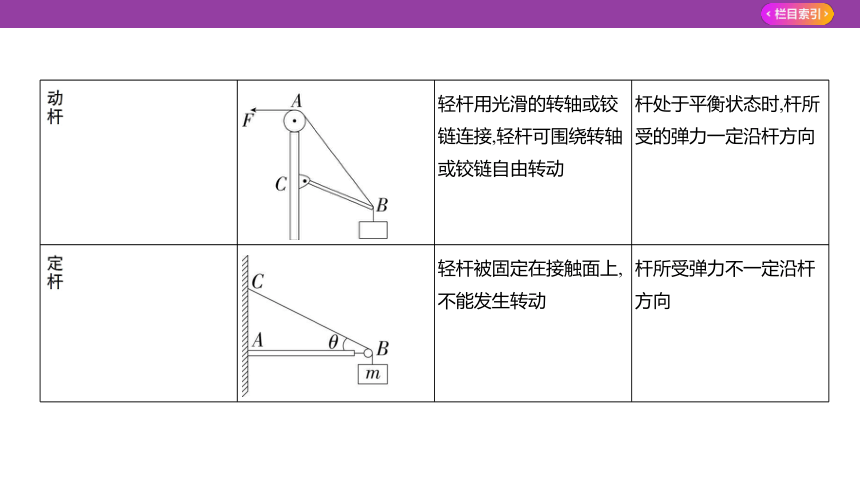
轻杆用光滑的转轴或铰
链连接,轻杆可围绕转轴
或铰链自由转动 杆处于平衡状态时,杆所
受的弹力一定沿杆方向
轻杆被固定在接触面上,
不能发生转动 杆所受弹力不一定沿杆
方向
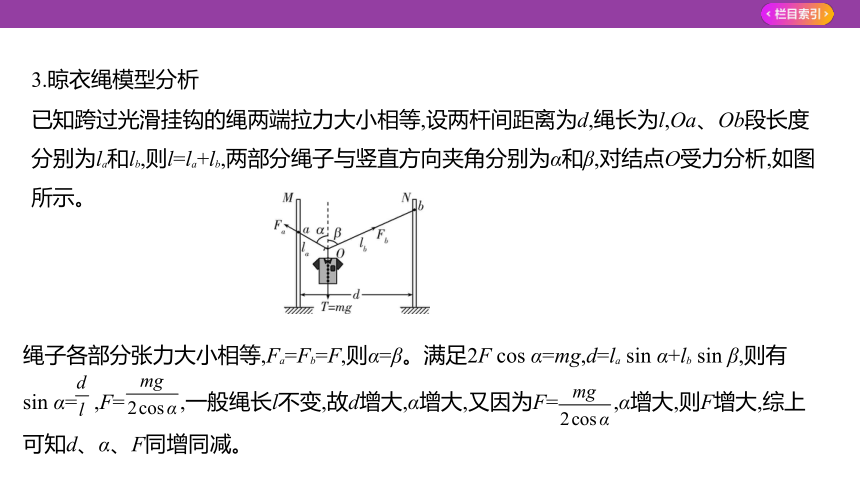
3.晾衣绳模型分析
已知跨过光滑挂钩的绳两端拉力大小相等,设两杆间距离为d,绳长为l,Oa、Ob段长度
分别为la和lb,则l=la+lb,两部分绳子与竖直方向夹角分别为α和β,对结点O受力分析,如图
所示。
绳子各部分张力大小相等,Fa=Fb=F,则α=β。满足2F cos α=mg,d=la sin α+lb sin β,则有
sin α= ,F= ,一般绳长l不变,故d增大,α增大,又因为F= ,α增大,则F增大,综上
可知d、α、F同增同减。
二、摩擦力
1.摩擦力的大小
(1)滑动摩擦力的大小:Ff=μFN。
(2)静摩擦力的大小
①若物体处于平衡状态,利用力的平衡条件求解。
②若物体有加速度,可用正交分解法结合牛顿第二定律F合=ma求解。
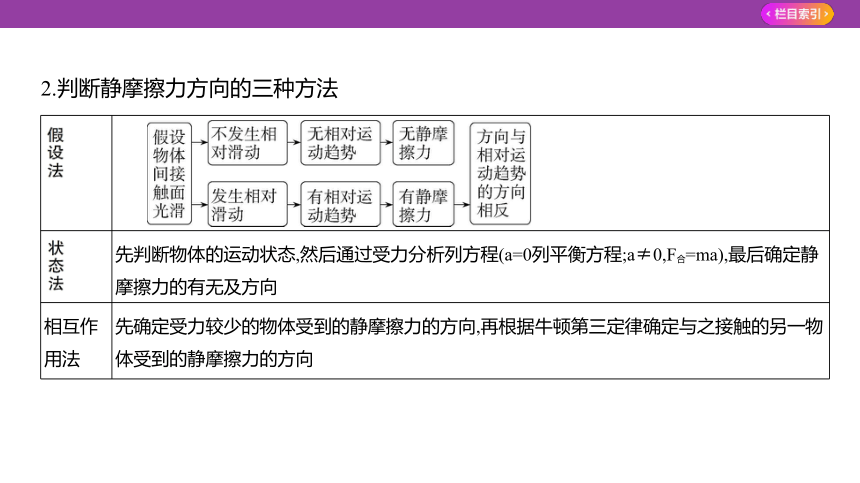
2.判断静摩擦力方向的三种方法
先判断物体的运动状态,然后通过受力分析列方程(a=0列平衡方程;a≠0,F合=ma),最后确定静摩擦力的有无及方向
相互作用法 先确定受力较少的物体受到的静摩擦力的方向,再根据牛顿第三定律确定与之接触的另一物体受到的静摩擦力的方向
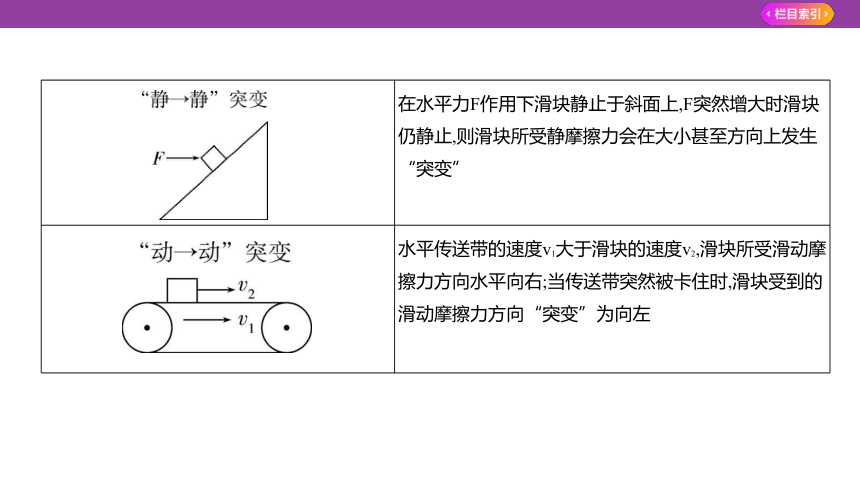
3.摩擦力的突变问题
分类 说明
滑块放在粗糙水平面上,作用在滑块上的水平力F
从0逐渐增大,当滑块开始滑动时,滑块受水平面的
摩擦力由静摩擦力“突变”为滑动摩擦力,方向不
变
滑块以v0冲上斜面做减速运动,当到达某位置时速
度减为0而后静止在斜面上,滑动摩擦力“突变”
为静摩擦力,方向相反
在水平力F作用下滑块静止于斜面上,F突然增大时滑块仍静止,则滑块所受静摩擦力会在大小甚至方向上发生“突变”
水平传送带的速度v1大于滑块的速度v2,滑块所受滑动摩擦力方向水平向右;当传送带突然被卡住时,滑块受到的滑动摩擦力方向“突变”为向左
三、力的合成与分解
1.几种特殊情况的共点力的合成
类型 作图 合力的计算
两力互相垂直 F=
tan θ=
两力等大,夹角为θ F=2F1 cos
F与F1夹角为
两力等大且夹角为120° 合力与分力大小相等,合力方向
在两分力夹角的角平分线上
2.力的分解
(1)正交分解法
一般选共点力的作用点为原点,在静力学中,以少分解力和容易分解力为原则;在动力
学中,往往以加速度方向和垂直加速度方向为坐标轴建立坐标系。
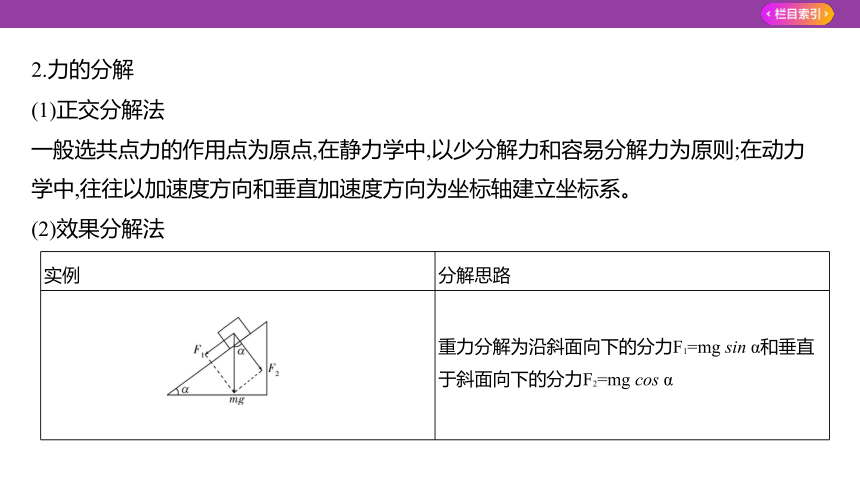
(2)效果分解法
实例 分解思路
重力分解为沿斜面向下的分力F1=mg sin α和垂直
于斜面向下的分力F2=mg cos α
实例 分解思路
将重力分解为使球压紧竖直挡板的分力F1=mg tan
α和使球压紧斜面的分力F2=
将重力分解为使球压紧竖直墙壁的分力F1=mg tan
α和使球拉紧悬线的分力F2=
考点2 受力分析 共点力的平衡
一、整体法与隔离法
方法拓展 整体法与隔离法的应用实例
(1)整体法:求挡板和木块间的摩擦力f时,将两挡板之间的所有物体看作一个整体,对整
体有2f=G总。
(2)隔离法:求挡板与木块间的弹力时,先对O点处的转轴受力分析,求出杆上的力,再对
木块受力分析。
二、求解共点力平衡问题的常用方法
方法 解读 适用情境
合成法 任意一个力与其余所有力的合
力等大反向 非共线多力平衡
正交分解法 =0, =0 多力平衡
矢量三角形法 把表示三个共点力的有向线段首尾相接构成一个闭合的三角形 非特殊角的一般三角形
题型1 动态平衡问题
一、核心思想——化“动”为静,“静”中求动
1.在某一平衡状态下对物体进行受力分析。
2.确定不变的力。
3.确定已知变化的力(大小和方向)如何变化。
4.根据F合=0求未知力。
二、解决动态平衡问题的常用方法
1.解析法
对研究对象进行受力分析,画出受力示意图,根据物体的平衡条件列方程,得到因变量
与自变量的函数表达式(通常为三角函数关系),最后根据自变量的变化确定因变量的
变化。该方法一般适用于物体受到三个或三个以上的共点力的作用而处于平衡状态
的情况,选择两个相互垂直的方向建立平面直角坐标系,将所有的力都分解到坐标轴
上,并根据列出的两个方向的平衡方程求解。
2.图解法的两类常见应用情境
类型一 “一个力恒定,另一个力方向不变”
(1)物体受三个力,一个力恒定,另一个力始终与恒定的力垂直,三力可构成直角三角形,
可作不同状态下的直角三角形,分析力的大小变化情况,如图甲所示。
(2)物体受三个力,一个力恒定,另一个力与恒定的力不垂直但方向不变,作出不同状态
下的矢量三角形,确定力大小的变化情况,在变化过程中恒力之外的两力垂直时,会有
极值出现,如图乙所示。
A
典例1 如图所示,足够长的光滑平板AP与BP用铰链连接,平板AP与水平面成53°角固
定不动,平板BP可绕铰链在竖直面内自由转动,质量为m的圆柱体O放在两板间,sin 53°
=0.8,cos 53°=0.6,重力加速度为g。在使BP板由水平位置缓慢转动到竖直位置的过程
中,下列说法正确的是 ( )
A.平板BP受到的最小压力为 mg
B.平板BP受到的最大压力为mg
C.平板AP受到的最小压力为 mg
D.平板AP受到的最大压力为mg
解析 在转动过程中,圆柱体受重力、平板AP的弹力F1和平板BP的弹力F2,力F1与F2
的合力为F,如图所示。(关键:重力mg恒定,F1方向不变,两个力的夹角不是直角)圆柱体
处于动态平衡状态,故F1与F2的合力F与重力等大反向。
采用图解法:从图中可以看出,在BP由水平位置缓慢转动到竖直位置的过程中,F1越来
越大,F2先减小后增大;由几何关系可知,当F2的方向平行于AP(即F2⊥F1)时,F2min=mg sin
53°= mg,根据牛顿第三定律可知BP受到的最小压力为 mg,A正确。当BP转到竖直方向时F2最大,F2max=mg tan 53°= mg,则BP受到的最大压力为 mg,B错误。当BP沿水平
方向时,AP对圆柱体的弹力为0,则AP受到的最小压力为0,C错误。由图可知,当BP转到
竖直方向时,AP对圆柱体的弹力F1最大,F1max= = mg,根据牛顿第三定律可知平板
AP受到的最大压力为 mg,D错误。
类型二 “一个力恒定,另两个力方向均变化”
(1)建构相似三角形
物体受三个力,一个力恒定(如重力),其他两个力的方向均变化,但三力构成的矢量三角
形与某个实际几何三角形相似,则对应边比值相等 ,如图所示。
根据几何关系可知,在向上拉动物体的过程中,R、H均不变,L变短,则FN不变,FT变小。
(2)辅助圆法及正弦定理法
物体受三个力作用处于动态平衡状态,一个力恒定,另外两个力方向一直变化,但两力
的夹角不变。
①辅助圆法:在圆中画力的矢量三角形,以恒定力为弦,另外两个力的顶点在圆周上移
动,由三角形各边长短的变化判定力的大小变化(两个力的夹角分为大于90°和小于90°
两种情况,如图所示)。
②正弦定理法:作出不同状态的矢量三角形,结合正弦定理列式求解。
AD
典例2 (多选)如图,柔软轻绳ON的一端O固定,其中间某点M拴一重物,用手拉住绳的
另一端N。初始时,OM竖直且MN被拉直,OM与MN之间的夹角为α(α> )。现将重物向
右上方缓慢拉起,并保持夹角α不变。在OM由竖直被拉到水平的过程中 ( )
A.MN上的张力逐渐增大
B.MN上的张力先增大后减小
C.OM上的张力逐渐增大
D.OM上的张力先增大后减小
解析 解法一 辅助圆法
以重物为研究对象分析其受力情况,受重力mg、MN绳的拉力F1、OM绳的拉力F2,由题
意知,三个力的合力始终为零,矢量三角形如图所示,F1、F2的夹角不变,在F2转至水平
的过程中,矢量三角形在同一外接圆上,由图可知,MN上的张力F1逐渐增大,OM上的张
力F2先增大后减小,所以A、D正确,B、C错误。
解法二 正弦定理法
根据正弦定理有 = = ,mg与 sin θ3保持不变,sin θ1变大,F1变大,sin θ2先增大
后减小,F2先增大后减小,A、D正确。
题型2 平衡中的临界极值问题
一、平衡中的临界问题与极值问题
1.平衡中的临界问题:当某物理量变化时,会引起其他物理量的变化,使物体所处的平
衡状态“恰好出现”或“恰好不出现”。
2.平衡中的极值问题:一般指力在变化过程中出现最大值或最小值的问题。
二、分析方法
1.物理分析法:根据平衡条件,作出力的矢量图,通过对物理过程的分析,利用平行四边
形定则或三角形定则进行动态分析,确定最大值或最小值。
典例1 将三个质量均为m的小球a、b、c用细线相连后(b、c间无细线相连),再用细
线悬挂于O点,如图所示,用力F拉小球c,使三个小球都处于静止状态,且细线Oa与竖直
方向的夹角保持为θ=30°,重力加速度为g,则F的最小值为 ( )
A.1.5mg B.1.8mg C.2.1mg D.2.4mg
A
解析 以a、b、c三球整体为研究对象,所受力的矢量三角形如图所示,当F垂直于T
时F最小,Fmin=3mg sin 30°=1.5mg,A正确。
2.数学分析法:通过对问题的分析,根据平衡条件列出物理量之间的函数关系式,用数
学方法求极值(例如求二次函数极值、三角函数极值等)。
3.极限分析法:首先要正确地进行受力分析和变化过程分析,找出平衡的临界点和极值
点;临界条件必须在变化中去寻找,不能停留在一个状态来研究临界问题,要把某个物
理量推向极端,即极大或极小。
典例2 拖把是由拖杆和拖把头构成的擦地工具(如图所示)。设拖把头的重力为G,拖
杆质量可忽略。拖把头与地板之间的动摩擦因数μ= ,最大静摩擦力等于滑动摩擦
力,某同学用该拖把在水平地板上拖地,拖杆与水平方向的夹角为θ。
(1)若沿拖杆方向拉拖把,要想使拖把头在地板上匀速移动,求拉拖把的拉力最小值。
(2)若沿拖杆方向推拖把,已知存在一临界角θ0,若θ≥θ0,则不管沿拖杆方向的推力有多
大,都不可能使拖把从静止开始运动,求这一临界角θ0。
解析 (1)拖把头受重力G、支持力FN、摩擦力f和拉力F作用。
①拖把头受力较多,采用什么方法处理平衡问题
采用正交分解法将拉力F沿水平方向和竖直方向分解,如图所示,由平衡条件
在水平方向上有F cos θ-μFN=0
在竖直方向上有F sin θ+FN-G=0
联立解得F=
②如何根据上面关系式求拉力F的最小值
设tan φ=μ,则cos φ=
所以F= ·
当cos (θ-φ)=1时,F取最小值
Fmin= = 。
(2)拖把头受重力G、支持力FN、摩擦力f和推力F推。
采用正交分解法,将F推沿竖直方向和水平方向分解,根据平衡条件有F推 sin θ+G=FN
设地板对拖把的最大静摩擦力为fm,则fm=μFN
③不管沿拖杆方向用多大的力都不能使拖把从静止开始运动的临界条件是什么
若不管沿拖杆方向用多大的力都不能使拖把从静止开始运动,应有F推 cos θ≤fm
联立解得cos θ-μ sin θ≤μ
④如何根据上面关系式求临界角θ0
当F推无限大时μ 趋近于零,有
cos θ-μ sin θ≤0
则 tan θ≥ =
故 tan θ0= = ,θ0=60°。
答案 (1) (2)60°
实验微专题
实验微专题2 探究弹簧弹力与形变量的关系
一、实验原理和装置图
在弹簧下端悬挂钩码,平衡时记下弹簧的总长度和钩码重力。改变钩码的个数,重复
上述实验过程,将数据填入表格,分析弹力大小与弹簧的形变量之间的关系。
二、操作要领及注意事项
1.如何控制钩码质量:所挂钩码不要过重,以免弹簧被过度拉伸,超出弹簧的弹性限
度。
2.如何测量弹簧的原长:考虑弹簧自身受重力的影响,实验时要将弹簧竖直悬挂测量原
长,不可以将弹簧放置在水平桌面上测量原长。
3.如何测量弹簧的长度:一定要在弹簧竖直悬挂且处于稳定状态时测量弹簧的长度,刻
度尺要保持竖直并靠近弹簧,以免增大读数误差。
4.如何作图:坐标轴标度要适中,单位要标注。(横坐标x是指形变量,不是长度)描点画
线时,所描的点不一定都落在一条直线上,但应注意一定要使各点均匀分布在直线的
两侧。
三、数据处理
1.图像法:以弹力F(大小等于所挂钩码受到的重力)为纵坐标,以弹簧的形变量x为横坐
标,用描点法作图,作出的拟合曲线是一条过坐标原点的倾斜直线,图线的斜率表示弹
簧的劲度系数,k= 。
2.函数法:以弹簧形变量为自变量,写出弹力和弹簧形变量之间的函数关系式,式中的
常数即弹簧的劲度系数。
产生原因 减小方法
读数误差 (1)多次测量
(2)选用更精确的刻度尺
(3)所挂钩码的质量差适当大一些
作图误差 坐标轴的标度尽量大一些,画线时让尽可能多的点落在线上或均匀分布于线的两侧
四、误差分析及改进措施
五、改进方案
方案一 横向测量
弹簧水平放置,消除弹簧自身重力对原长测量的影响,减小测量误差。
方案二 实验仪器的改进
实验微专题3 探究两个互成角度的力的合成规律
一、实验原理及装置图
互成角度的两个力F1和F2共同作用的效果与一个力F'单独作用的效果相同。若用平
行四边形定则将F1和F2合成后的力F与F'相差不大,则说明力的平行四边形定则适用。
二、操作要领及注意事项
1.如何保证等效:同一次实验中两次把橡皮条拉长后的结点所处的位置O点必须保持
不变。
2.如何拉弹簧测力计:用两个弹簧测力计拉橡皮条时,它们之间的夹角在60°~100°为宜;
读数时应注意使弹簧测力计与木板平行。
3.如何记录拉力:记录方向时,选用的细绳套适当长一些,根据细绳套位置选取适当远
的两点标记在白纸上,去掉细绳套后,再将所标记的点用直线连接。
三、数据处理
1.用铅笔和刻度尺从O点沿两个细绳套方向画直线,按选定的标度作出这两个弹簧测
力计的拉力F1和F2的图示,作平行四边形,过O点画对角线,即合力F的图示。
2.用刻度尺从O点按同样的标度沿记录的方向作出只用一个弹簧测力计时拉力F'的图示。
2.作图误差
减小作图误差的方法:①作图时要画准结点的位置和两个弹簧测力计的方向;②两个
力F1、F2间的夹角越大,用平行四边形定则作出的合力F的误差ΔF就越大,所以实验时
不要把F1、F2间的夹角取得太大;③作图比例要恰当。
四、误差分析及改进措施
1.读数误差
减小读数误差的方法:①弹簧测力计使用前调零要准确;②在允许的情况下,弹簧测力
计的示数应尽量大一些;③选用传感器测量力的大小,以减小误差,如图所示。
五、改进方案
方案一 如图甲所示,使用汇力圆环,每次将汇力圆环拉至定位圆,方便确定力的方向,
作图更直观。
方案二 如图乙所示,通过改变钩码个数来改变力,力的大小可以通过计算钩码个数得到,无需用弹簧测力计测量,也无需保证每次结点位置相同。
体系透视
考点透析
实验微专题
目 录
考点1 常见的三种力 力的合成与分解
考点2 受力分析 共点力的平衡
实验微专题2 探究弹簧弹力与形变量的关系
实验微专题3 探究两个互成角度的力的合成规律
题型透悟
题型1 动态平衡问题
题型2 平衡中的临界值问题
考点1 常见的三种力 力的合成与分解
一、弹力
1.弹力的方向
2.绳、杆理想模型
模型结构 模型解读 模型特点
一根绳跨过光滑滑轮或
光滑挂钩 绳上的张力大小处处相
等
把绳分为两段,且结点不
可沿绳移动 “死结”两侧绳上的张
力大小不一定相等
轻杆用光滑的转轴或铰
链连接,轻杆可围绕转轴
或铰链自由转动 杆处于平衡状态时,杆所
受的弹力一定沿杆方向
轻杆被固定在接触面上,
不能发生转动 杆所受弹力不一定沿杆
方向
3.晾衣绳模型分析
已知跨过光滑挂钩的绳两端拉力大小相等,设两杆间距离为d,绳长为l,Oa、Ob段长度
分别为la和lb,则l=la+lb,两部分绳子与竖直方向夹角分别为α和β,对结点O受力分析,如图
所示。
绳子各部分张力大小相等,Fa=Fb=F,则α=β。满足2F cos α=mg,d=la sin α+lb sin β,则有
sin α= ,F= ,一般绳长l不变,故d增大,α增大,又因为F= ,α增大,则F增大,综上
可知d、α、F同增同减。
二、摩擦力
1.摩擦力的大小
(1)滑动摩擦力的大小:Ff=μFN。
(2)静摩擦力的大小
①若物体处于平衡状态,利用力的平衡条件求解。
②若物体有加速度,可用正交分解法结合牛顿第二定律F合=ma求解。
2.判断静摩擦力方向的三种方法
先判断物体的运动状态,然后通过受力分析列方程(a=0列平衡方程;a≠0,F合=ma),最后确定静摩擦力的有无及方向
相互作用法 先确定受力较少的物体受到的静摩擦力的方向,再根据牛顿第三定律确定与之接触的另一物体受到的静摩擦力的方向
3.摩擦力的突变问题
分类 说明
滑块放在粗糙水平面上,作用在滑块上的水平力F
从0逐渐增大,当滑块开始滑动时,滑块受水平面的
摩擦力由静摩擦力“突变”为滑动摩擦力,方向不
变
滑块以v0冲上斜面做减速运动,当到达某位置时速
度减为0而后静止在斜面上,滑动摩擦力“突变”
为静摩擦力,方向相反
在水平力F作用下滑块静止于斜面上,F突然增大时滑块仍静止,则滑块所受静摩擦力会在大小甚至方向上发生“突变”
水平传送带的速度v1大于滑块的速度v2,滑块所受滑动摩擦力方向水平向右;当传送带突然被卡住时,滑块受到的滑动摩擦力方向“突变”为向左
三、力的合成与分解
1.几种特殊情况的共点力的合成
类型 作图 合力的计算
两力互相垂直 F=
tan θ=
两力等大,夹角为θ F=2F1 cos
F与F1夹角为
两力等大且夹角为120° 合力与分力大小相等,合力方向
在两分力夹角的角平分线上
2.力的分解
(1)正交分解法
一般选共点力的作用点为原点,在静力学中,以少分解力和容易分解力为原则;在动力
学中,往往以加速度方向和垂直加速度方向为坐标轴建立坐标系。
(2)效果分解法
实例 分解思路
重力分解为沿斜面向下的分力F1=mg sin α和垂直
于斜面向下的分力F2=mg cos α
实例 分解思路
将重力分解为使球压紧竖直挡板的分力F1=mg tan
α和使球压紧斜面的分力F2=
将重力分解为使球压紧竖直墙壁的分力F1=mg tan
α和使球拉紧悬线的分力F2=
考点2 受力分析 共点力的平衡
一、整体法与隔离法
方法拓展 整体法与隔离法的应用实例
(1)整体法:求挡板和木块间的摩擦力f时,将两挡板之间的所有物体看作一个整体,对整
体有2f=G总。
(2)隔离法:求挡板与木块间的弹力时,先对O点处的转轴受力分析,求出杆上的力,再对
木块受力分析。
二、求解共点力平衡问题的常用方法
方法 解读 适用情境
合成法 任意一个力与其余所有力的合
力等大反向 非共线多力平衡
正交分解法 =0, =0 多力平衡
矢量三角形法 把表示三个共点力的有向线段首尾相接构成一个闭合的三角形 非特殊角的一般三角形
题型1 动态平衡问题
一、核心思想——化“动”为静,“静”中求动
1.在某一平衡状态下对物体进行受力分析。
2.确定不变的力。
3.确定已知变化的力(大小和方向)如何变化。
4.根据F合=0求未知力。
二、解决动态平衡问题的常用方法
1.解析法
对研究对象进行受力分析,画出受力示意图,根据物体的平衡条件列方程,得到因变量
与自变量的函数表达式(通常为三角函数关系),最后根据自变量的变化确定因变量的
变化。该方法一般适用于物体受到三个或三个以上的共点力的作用而处于平衡状态
的情况,选择两个相互垂直的方向建立平面直角坐标系,将所有的力都分解到坐标轴
上,并根据列出的两个方向的平衡方程求解。
2.图解法的两类常见应用情境
类型一 “一个力恒定,另一个力方向不变”
(1)物体受三个力,一个力恒定,另一个力始终与恒定的力垂直,三力可构成直角三角形,
可作不同状态下的直角三角形,分析力的大小变化情况,如图甲所示。
(2)物体受三个力,一个力恒定,另一个力与恒定的力不垂直但方向不变,作出不同状态
下的矢量三角形,确定力大小的变化情况,在变化过程中恒力之外的两力垂直时,会有
极值出现,如图乙所示。
A
典例1 如图所示,足够长的光滑平板AP与BP用铰链连接,平板AP与水平面成53°角固
定不动,平板BP可绕铰链在竖直面内自由转动,质量为m的圆柱体O放在两板间,sin 53°
=0.8,cos 53°=0.6,重力加速度为g。在使BP板由水平位置缓慢转动到竖直位置的过程
中,下列说法正确的是 ( )
A.平板BP受到的最小压力为 mg
B.平板BP受到的最大压力为mg
C.平板AP受到的最小压力为 mg
D.平板AP受到的最大压力为mg
解析 在转动过程中,圆柱体受重力、平板AP的弹力F1和平板BP的弹力F2,力F1与F2
的合力为F,如图所示。(关键:重力mg恒定,F1方向不变,两个力的夹角不是直角)圆柱体
处于动态平衡状态,故F1与F2的合力F与重力等大反向。
采用图解法:从图中可以看出,在BP由水平位置缓慢转动到竖直位置的过程中,F1越来
越大,F2先减小后增大;由几何关系可知,当F2的方向平行于AP(即F2⊥F1)时,F2min=mg sin
53°= mg,根据牛顿第三定律可知BP受到的最小压力为 mg,A正确。当BP转到竖直方向时F2最大,F2max=mg tan 53°= mg,则BP受到的最大压力为 mg,B错误。当BP沿水平
方向时,AP对圆柱体的弹力为0,则AP受到的最小压力为0,C错误。由图可知,当BP转到
竖直方向时,AP对圆柱体的弹力F1最大,F1max= = mg,根据牛顿第三定律可知平板
AP受到的最大压力为 mg,D错误。
类型二 “一个力恒定,另两个力方向均变化”
(1)建构相似三角形
物体受三个力,一个力恒定(如重力),其他两个力的方向均变化,但三力构成的矢量三角
形与某个实际几何三角形相似,则对应边比值相等 ,如图所示。
根据几何关系可知,在向上拉动物体的过程中,R、H均不变,L变短,则FN不变,FT变小。
(2)辅助圆法及正弦定理法
物体受三个力作用处于动态平衡状态,一个力恒定,另外两个力方向一直变化,但两力
的夹角不变。
①辅助圆法:在圆中画力的矢量三角形,以恒定力为弦,另外两个力的顶点在圆周上移
动,由三角形各边长短的变化判定力的大小变化(两个力的夹角分为大于90°和小于90°
两种情况,如图所示)。
②正弦定理法:作出不同状态的矢量三角形,结合正弦定理列式求解。
AD
典例2 (多选)如图,柔软轻绳ON的一端O固定,其中间某点M拴一重物,用手拉住绳的
另一端N。初始时,OM竖直且MN被拉直,OM与MN之间的夹角为α(α> )。现将重物向
右上方缓慢拉起,并保持夹角α不变。在OM由竖直被拉到水平的过程中 ( )
A.MN上的张力逐渐增大
B.MN上的张力先增大后减小
C.OM上的张力逐渐增大
D.OM上的张力先增大后减小
解析 解法一 辅助圆法
以重物为研究对象分析其受力情况,受重力mg、MN绳的拉力F1、OM绳的拉力F2,由题
意知,三个力的合力始终为零,矢量三角形如图所示,F1、F2的夹角不变,在F2转至水平
的过程中,矢量三角形在同一外接圆上,由图可知,MN上的张力F1逐渐增大,OM上的张
力F2先增大后减小,所以A、D正确,B、C错误。
解法二 正弦定理法
根据正弦定理有 = = ,mg与 sin θ3保持不变,sin θ1变大,F1变大,sin θ2先增大
后减小,F2先增大后减小,A、D正确。
题型2 平衡中的临界极值问题
一、平衡中的临界问题与极值问题
1.平衡中的临界问题:当某物理量变化时,会引起其他物理量的变化,使物体所处的平
衡状态“恰好出现”或“恰好不出现”。
2.平衡中的极值问题:一般指力在变化过程中出现最大值或最小值的问题。
二、分析方法
1.物理分析法:根据平衡条件,作出力的矢量图,通过对物理过程的分析,利用平行四边
形定则或三角形定则进行动态分析,确定最大值或最小值。
典例1 将三个质量均为m的小球a、b、c用细线相连后(b、c间无细线相连),再用细
线悬挂于O点,如图所示,用力F拉小球c,使三个小球都处于静止状态,且细线Oa与竖直
方向的夹角保持为θ=30°,重力加速度为g,则F的最小值为 ( )
A.1.5mg B.1.8mg C.2.1mg D.2.4mg
A
解析 以a、b、c三球整体为研究对象,所受力的矢量三角形如图所示,当F垂直于T
时F最小,Fmin=3mg sin 30°=1.5mg,A正确。
2.数学分析法:通过对问题的分析,根据平衡条件列出物理量之间的函数关系式,用数
学方法求极值(例如求二次函数极值、三角函数极值等)。
3.极限分析法:首先要正确地进行受力分析和变化过程分析,找出平衡的临界点和极值
点;临界条件必须在变化中去寻找,不能停留在一个状态来研究临界问题,要把某个物
理量推向极端,即极大或极小。
典例2 拖把是由拖杆和拖把头构成的擦地工具(如图所示)。设拖把头的重力为G,拖
杆质量可忽略。拖把头与地板之间的动摩擦因数μ= ,最大静摩擦力等于滑动摩擦
力,某同学用该拖把在水平地板上拖地,拖杆与水平方向的夹角为θ。
(1)若沿拖杆方向拉拖把,要想使拖把头在地板上匀速移动,求拉拖把的拉力最小值。
(2)若沿拖杆方向推拖把,已知存在一临界角θ0,若θ≥θ0,则不管沿拖杆方向的推力有多
大,都不可能使拖把从静止开始运动,求这一临界角θ0。
解析 (1)拖把头受重力G、支持力FN、摩擦力f和拉力F作用。
①拖把头受力较多,采用什么方法处理平衡问题
采用正交分解法将拉力F沿水平方向和竖直方向分解,如图所示,由平衡条件
在水平方向上有F cos θ-μFN=0
在竖直方向上有F sin θ+FN-G=0
联立解得F=
②如何根据上面关系式求拉力F的最小值
设tan φ=μ,则cos φ=
所以F= ·
当cos (θ-φ)=1时,F取最小值
Fmin= = 。
(2)拖把头受重力G、支持力FN、摩擦力f和推力F推。
采用正交分解法,将F推沿竖直方向和水平方向分解,根据平衡条件有F推 sin θ+G=FN
设地板对拖把的最大静摩擦力为fm,则fm=μFN
③不管沿拖杆方向用多大的力都不能使拖把从静止开始运动的临界条件是什么
若不管沿拖杆方向用多大的力都不能使拖把从静止开始运动,应有F推 cos θ≤fm
联立解得cos θ-μ sin θ≤μ
④如何根据上面关系式求临界角θ0
当F推无限大时μ 趋近于零,有
cos θ-μ sin θ≤0
则 tan θ≥ =
故 tan θ0= = ,θ0=60°。
答案 (1) (2)60°
实验微专题
实验微专题2 探究弹簧弹力与形变量的关系
一、实验原理和装置图
在弹簧下端悬挂钩码,平衡时记下弹簧的总长度和钩码重力。改变钩码的个数,重复
上述实验过程,将数据填入表格,分析弹力大小与弹簧的形变量之间的关系。
二、操作要领及注意事项
1.如何控制钩码质量:所挂钩码不要过重,以免弹簧被过度拉伸,超出弹簧的弹性限
度。
2.如何测量弹簧的原长:考虑弹簧自身受重力的影响,实验时要将弹簧竖直悬挂测量原
长,不可以将弹簧放置在水平桌面上测量原长。
3.如何测量弹簧的长度:一定要在弹簧竖直悬挂且处于稳定状态时测量弹簧的长度,刻
度尺要保持竖直并靠近弹簧,以免增大读数误差。
4.如何作图:坐标轴标度要适中,单位要标注。(横坐标x是指形变量,不是长度)描点画
线时,所描的点不一定都落在一条直线上,但应注意一定要使各点均匀分布在直线的
两侧。
三、数据处理
1.图像法:以弹力F(大小等于所挂钩码受到的重力)为纵坐标,以弹簧的形变量x为横坐
标,用描点法作图,作出的拟合曲线是一条过坐标原点的倾斜直线,图线的斜率表示弹
簧的劲度系数,k= 。
2.函数法:以弹簧形变量为自变量,写出弹力和弹簧形变量之间的函数关系式,式中的
常数即弹簧的劲度系数。
产生原因 减小方法
读数误差 (1)多次测量
(2)选用更精确的刻度尺
(3)所挂钩码的质量差适当大一些
作图误差 坐标轴的标度尽量大一些,画线时让尽可能多的点落在线上或均匀分布于线的两侧
四、误差分析及改进措施
五、改进方案
方案一 横向测量
弹簧水平放置,消除弹簧自身重力对原长测量的影响,减小测量误差。
方案二 实验仪器的改进
实验微专题3 探究两个互成角度的力的合成规律
一、实验原理及装置图
互成角度的两个力F1和F2共同作用的效果与一个力F'单独作用的效果相同。若用平
行四边形定则将F1和F2合成后的力F与F'相差不大,则说明力的平行四边形定则适用。
二、操作要领及注意事项
1.如何保证等效:同一次实验中两次把橡皮条拉长后的结点所处的位置O点必须保持
不变。
2.如何拉弹簧测力计:用两个弹簧测力计拉橡皮条时,它们之间的夹角在60°~100°为宜;
读数时应注意使弹簧测力计与木板平行。
3.如何记录拉力:记录方向时,选用的细绳套适当长一些,根据细绳套位置选取适当远
的两点标记在白纸上,去掉细绳套后,再将所标记的点用直线连接。
三、数据处理
1.用铅笔和刻度尺从O点沿两个细绳套方向画直线,按选定的标度作出这两个弹簧测
力计的拉力F1和F2的图示,作平行四边形,过O点画对角线,即合力F的图示。
2.用刻度尺从O点按同样的标度沿记录的方向作出只用一个弹簧测力计时拉力F'的图示。
2.作图误差
减小作图误差的方法:①作图时要画准结点的位置和两个弹簧测力计的方向;②两个
力F1、F2间的夹角越大,用平行四边形定则作出的合力F的误差ΔF就越大,所以实验时
不要把F1、F2间的夹角取得太大;③作图比例要恰当。
四、误差分析及改进措施
1.读数误差
减小读数误差的方法:①弹簧测力计使用前调零要准确;②在允许的情况下,弹簧测力
计的示数应尽量大一些;③选用传感器测量力的大小,以减小误差,如图所示。
五、改进方案
方案一 如图甲所示,使用汇力圆环,每次将汇力圆环拉至定位圆,方便确定力的方向,
作图更直观。
方案二 如图乙所示,通过改变钩码个数来改变力,力的大小可以通过计算钩码个数得到,无需用弹簧测力计测量,也无需保证每次结点位置相同。
同课章节目录