华师大科学九年级上 5.1杠杆 培优练习(含答案)
文档属性
| 名称 | 华师大科学九年级上 5.1杠杆 培优练习(含答案) |
|
|
| 格式 | doc | ||
| 文件大小 | 1.2MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 华东师大版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2024-09-04 08:55:53 | ||
图片预览
文档简介
中小学教育资源及组卷应用平台
九上 第二章 酸和碱
一.选择题(共20小题)
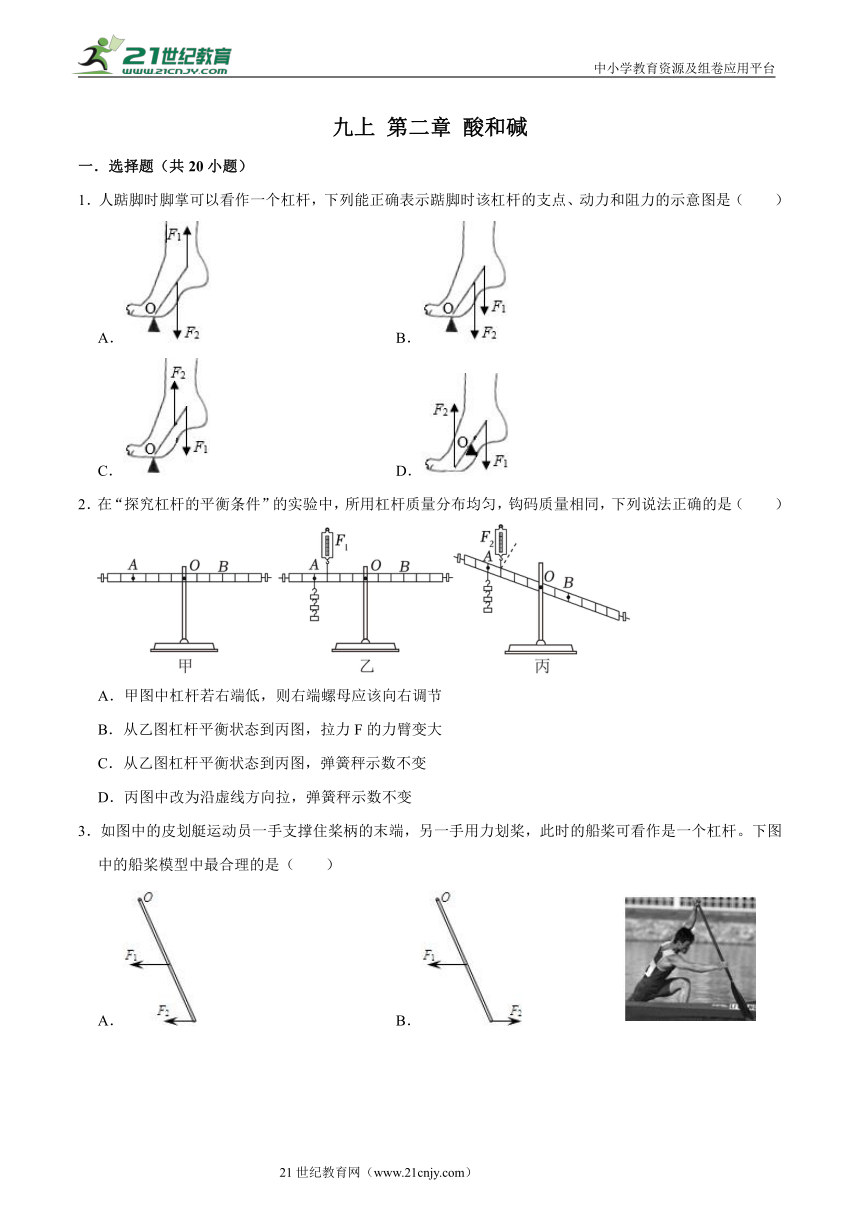
1.人踮脚时脚掌可以看作一个杠杆,下列能正确表示踮脚时该杠杆的支点、动力和阻力的示意图是( )
A. B.
C. D.
2.在“探究杠杆的平衡条件”的实验中,所用杠杆质量分布均匀,钩码质量相同,下列说法正确的是( )
A.甲图中杠杆若右端低,则右端螺母应该向右调节
B.从乙图杠杆平衡状态到丙图,拉力F的力臂变大
C.从乙图杠杆平衡状态到丙图,弹簧秤示数不变
D.丙图中改为沿虚线方向拉,弹簧秤示数不变
3.如图中的皮划艇运动员一手支撑住桨柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B.
C. D.
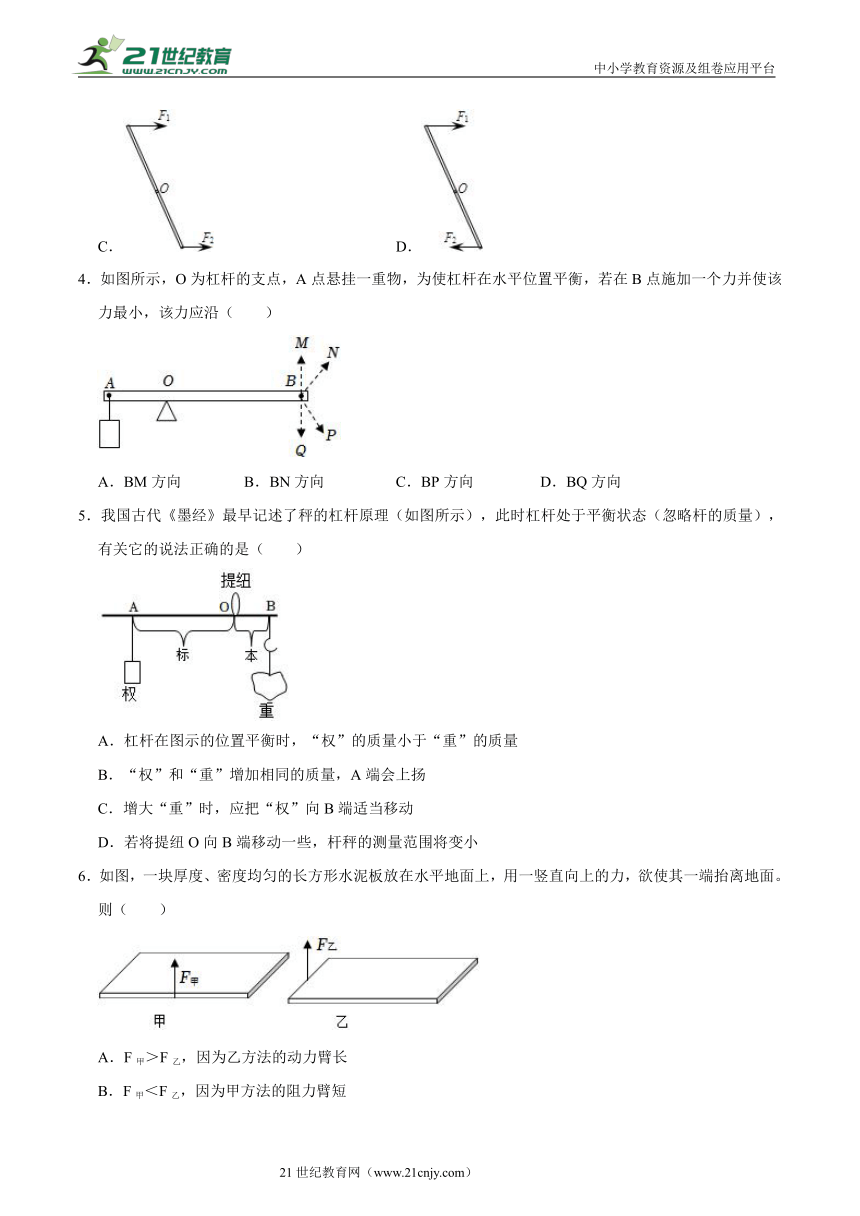
4.如图所示,O为杠杆的支点,A点悬挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
5.我国古代《墨经》最早记述了秤的杠杆原理(如图所示),此时杠杆处于平衡状态(忽略杆的质量),有关它的说法正确的是( )
A.杠杆在图示的位置平衡时,“权”的质量小于“重”的质量
B.“权”和“重”增加相同的质量,A端会上扬
C.增大“重”时,应把“权”向B端适当移动
D.若将提纽O向B端移动一些,杆秤的测量范围将变小
6.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力,欲使其一端抬离地面。则( )
A.F甲>F乙,因为乙方法的动力臂长
B.F甲<F乙,因为甲方法的阻力臂短
C.F甲>F乙,因为甲方法的动力臂短
D.F甲=F乙,因为动力臂都是阻力臂的2倍
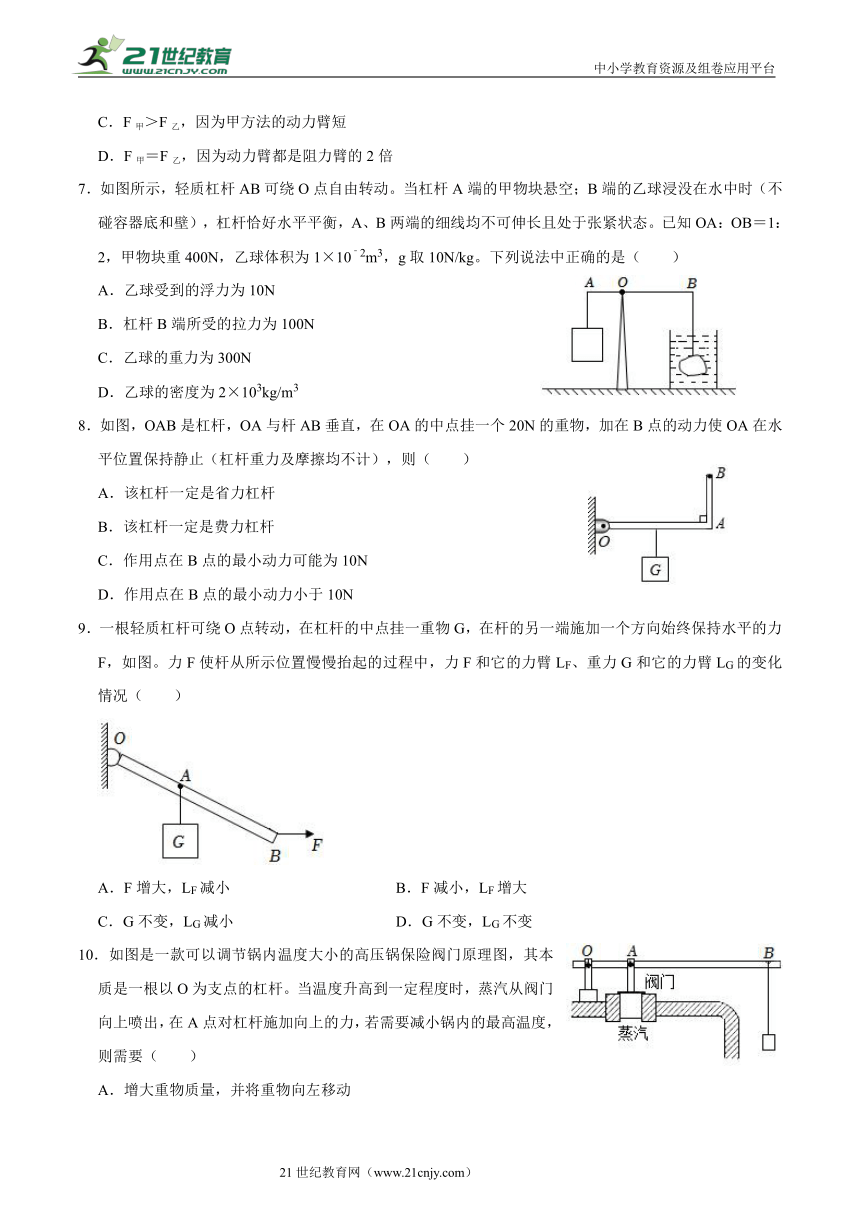
7.如图所示,轻质杠杆AB可绕O点自由转动。当杠杆A端的甲物块悬空;B端的乙球浸没在水中时(不碰容器底和壁),杠杆恰好水平平衡,A、B两端的细线均不可伸长且处于张紧状态。已知OA:OB=1:2,甲物块重400N,乙球体积为1×10﹣2m3,g取10N/kg。下列说法中正确的是( )
A.乙球受到的浮力为10N
B.杠杆B端所受的拉力为100N
C.乙球的重力为300N
D.乙球的密度为2×103kg/m3
8.如图,OAB是杠杆,OA与杆AB垂直,在OA的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力可能为10N
D.作用点在B点的最小动力小于10N
9.一根轻质杠杆可绕O点转动,在杠杆的中点挂一重物G,在杆的另一端施加一个方向始终保持水平的力F,如图。力F使杆从所示位置慢慢抬起的过程中,力F和它的力臂LF、重力G和它的力臂LG的变化情况( )
A.F增大,LF减小 B.F减小,LF增大
C.G不变,LG减小 D.G不变,LG不变
10.如图是一款可以调节锅内温度大小的高压锅保险阀门原理图,其本质是一根以O为支点的杠杆。当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,若需要减小锅内的最高温度,则需要( )
A.增大重物质量,并将重物向左移动
B.增大重物质量,并将重物向右移动
C.减小重物质量,并将重物向左移动
D.减小重物质量,并将重物向右移动
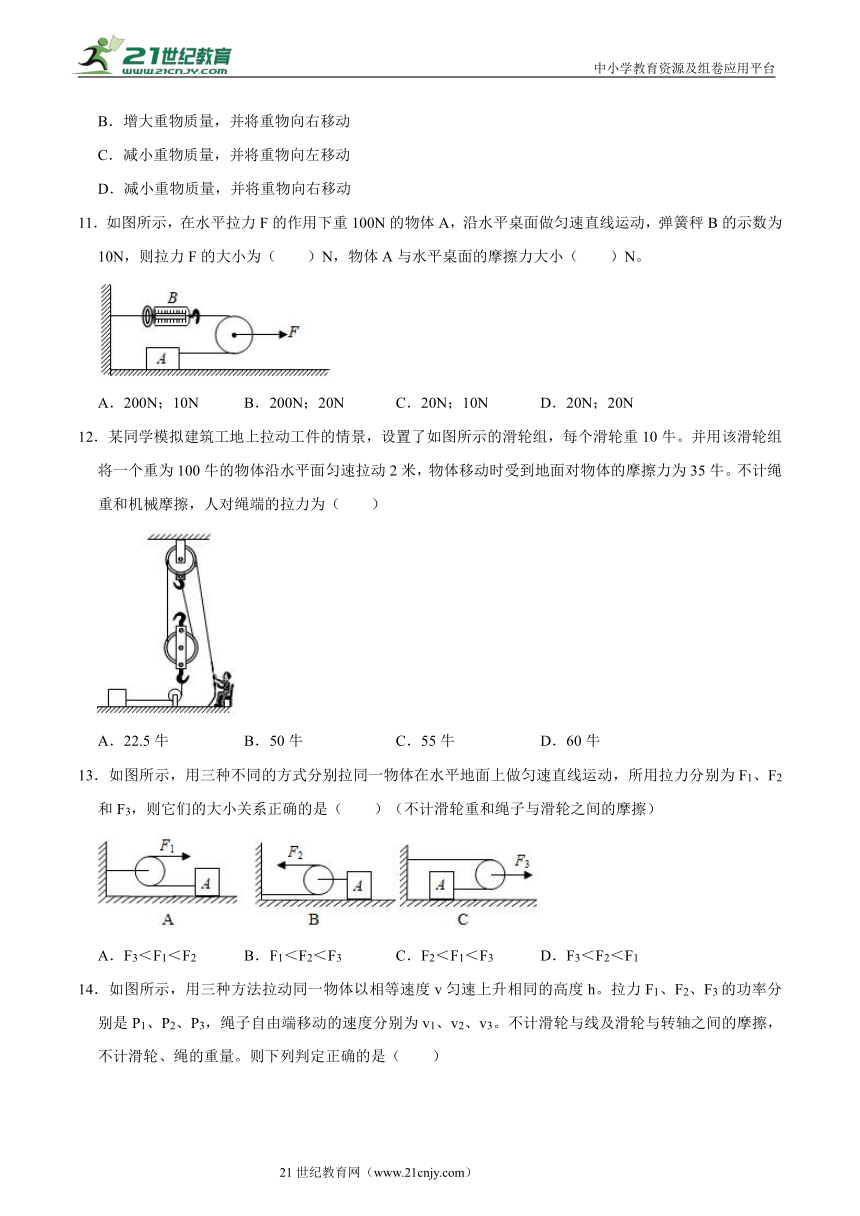
11.如图所示,在水平拉力F的作用下重100N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10N,则拉力F的大小为( )N,物体A与水平桌面的摩擦力大小( )N。
A.200N;10N B.200N;20N C.20N;10N D.20N;20N
12.某同学模拟建筑工地上拉动工件的情景,设置了如图所示的滑轮组,每个滑轮重10牛。并用该滑轮组将一个重为100牛的物体沿水平面匀速拉动2米,物体移动时受到地面对物体的摩擦力为35牛。不计绳重和机械摩擦,人对绳端的拉力为( )
A.22.5牛 B.50牛 C.55牛 D.60牛
13.如图所示,用三种不同的方式分别拉同一物体在水平地面上做匀速直线运动,所用拉力分别为F1、F2和F3,则它们的大小关系正确的是( )(不计滑轮重和绳子与滑轮之间的摩擦)
A.F3<F1<F2 B.F1<F2<F3 C.F2<F1<F3 D.F3<F2<F1
14.如图所示,用三种方法拉动同一物体以相等速度v匀速上升相同的高度h。拉力F1、F2、F3的功率分别是P1、P2、P3,绳子自由端移动的速度分别为v1、v2、v3。不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。则下列判定正确的是( )
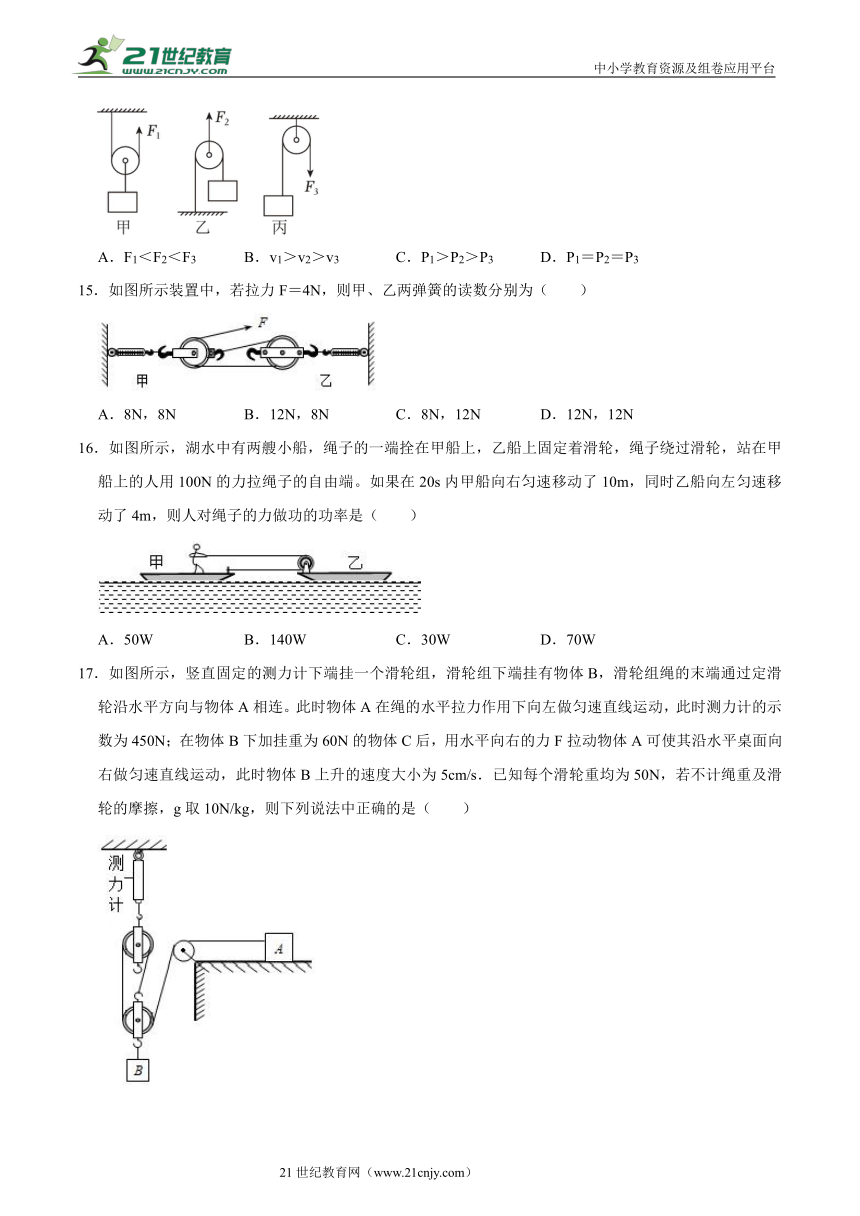
A.F1<F2<F3 B.v1>v2>v3 C.P1>P2>P3 D.P1=P2=P3
15.如图所示装置中,若拉力F=4N,则甲、乙两弹簧的读数分别为( )
A.8N,8N B.12N,8N C.8N,12N D.12N,12N
16.如图所示,湖水中有两艘小船,绳子的一端拴在甲船上,乙船上固定着滑轮,绳子绕过滑轮,站在甲船上的人用100N的力拉绳子的自由端。如果在20s内甲船向右匀速移动了10m,同时乙船向左匀速移动了4m,则人对绳子的力做功的功率是( )
A.50W B.140W C.30W D.70W
17.如图所示,竖直固定的测力计下端挂一个滑轮组,滑轮组下端挂有物体B,滑轮组绳的末端通过定滑轮沿水平方向与物体A相连。此时物体A在绳的水平拉力作用下向左做匀速直线运动,此时测力计的示数为450N;在物体B下加挂重为60N的物体C后,用水平向右的力F拉动物体A可使其沿水平桌面向右做匀速直线运动,此时物体B上升的速度大小为5cm/s.已知每个滑轮重均为50N,若不计绳重及滑轮的摩擦,g取10N/kg,则下列说法中正确的是( )
A.物体A所受滑动摩擦力大小为100N
B.水平向右的力F的大小为400N
C.物体B所受重力为400N
D.拉力F做功的功率为63W
18.如图所示,用40N的力F沿水平方向拉滑轮,可使重20N的物体A以0.3m/s的速度在水平面上匀速运动:物体B重10N,弹簧测力计的示数恒为10N(不计滑轮、测力计、绳子的重量,滑轮的转轴光滑)。下列说法不正确的是( )
A.物体A受到地面的摩擦力是10N
B.滑轮移动的速度是0.15m/s
C.水平拉力F的功率是6W
D.在2s内绳子对物体A做的功为6J
19.图中a、b、c为三个物块,M、N为两个轻质弹簧,R为跨过光滑定滑轮的轻绳,它们连接如图并处于平衡状态。则以下说法正确的个数是( )
①有可能N处于拉伸状态而M处于压缩状态
②有可能N处于压缩状态而M处于拉伸状态
③有可能N处于不伸不缩状态而M处于拉伸状态
④有可能N处于拉伸状态而M处于不伸不缩状态。
A.一个 B.二个 C.三个 D.四个
20.如图甲所示的滑轮组装置,不计绳重和摩擦,绳对滑轮的拉力方向均为竖直方向。用该滑轮组提升放置在水平地面上重为G=80N的重物到高处。用竖直向下的拉力拉绳的自由端,拉力F随时间t变化的图像如图乙所示,重物上升的速度v随时间t变化的图像如图丙所示。已知在2s 4s内重物上升的竖直高度为2m,则下列说法错误的是( )
A.动滑轮重为20N
B.0 2s内重物对地面的压力为40N
C.2 4s内,绳自由端下降的平均速度为2m/s
D.4 6s内,拉力F的功率为100W
二.填空题(共7小题)
21.用好科学知识有利于轻松出行。如图为小科使用的拉杆旅行箱,装有物品的旅行箱整体可视为杠杆,O为支点,B为重心,A为拉杆的端点,在A点沿图示方向施加拉力F使旅行箱保持静止。
(1)其他条件不变时,仅缩短拉杆的长度,拉力F会 (选填“增大”“不变”或“缩小”)。
(2)生活中常把箱内物体整体的重心以 (选填“B→B'”或“B'→B”)转移,在其他条件不变时,拉力F会减小。
22.小乐用竖直向上的拉力F拉着一个重为200N的行李箱,行李箱保持静止。如图所示为此时行李箱所受拉力F和重力G的示意图,其中O为滚轮的转轴(不计此处摩擦),OA=10cm,AB=30cm,则拉力F的大小为 N。若小乐沿MN箭头方向施加拉力,行李箱能否继续保持静止?判断并说明理由。 。
23.如图为“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=2OB,G1=10牛,杠杆自身重力和摩擦不计,固定装置未画出。
(1)当杠杆处于甲图所示水平位置平衡时,G2的重力为 牛;
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(OB'=OB),保持G1位置不变,要使杠杆在图乙位置保持平衡,则G2的悬挂点应该移动至 点处(选填“①”、“②”或“③”)。若不移动,则A端将 (选填“上升”或“下降”)。
24.如图所示,F1=8N,F2=6N,此时物体A相对于地面静山,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。
(1)弹簧测力计读数为 N。
(2)物体A和地面之间的摩擦力 N。
(3)如果增大F2,物体A是否有可能向左运动?请说明理由 。
25.图甲是脚踏式翻盖垃圾桶的实物图,通过两个水平杠杆组合实现脚踏翻盖,图乙为这两个杠杆AO1B和DCO2的示意图。已知桶盖重5N,重心位于DC中点的正上方,AO1=30cm,O1B=20cm,桶盖和连接杆的尺寸如图乙所示,脚踏杆AO1B和竖直连接杆BC的质量不计。
(1)杠杆DCO2阻力臂长度为 ;
(2)若要把桶盖翻开,脚对踏板A处的压力至少为 。
26.如图所示,物体A重为200N,C、D滑轮重均为30N。物体B重为120N,它恰好能拉着A向右匀速运动,不计滑轮与绳子间摩擦。
(1)图中D为 (填“定”或“动”)滑轮。
(2)现用水平向左的拉力F作用于物体A上,使物体B匀速上升,则拉力F的大小为 N。
27.如图所示,每个滑轮重20牛,质量为60kg的人,站在质量为30kg的吊篮内,人至少用 N的拉力拉住绳子,才能使自己和吊篮在空中保持静止。(不计绳重及摩擦)
三.实验探究题(共2小题)
28.如图所示是一个自制密度秤,其外形和杆秤差不多。其左端A点挂一个质量为0.2kg、体积为25cm3的铁块。提纽位于O处,秤砣放在B处时,秤杆恰好水平平衡。已知秤砣的质量为0.1kg,AO=5cm,BO=10cm。把铁块浸没在待测密度的液体中时,移动秤砣便可直接在杆上读出液体的密度。
(1)密度秤零刻度在O点右侧 cm处。
(2)现将铁块浸没在待测液体中,秤砣左移1.5cm到C点时,杠杆在水平位置重新平衡,则待测液体的密度为 kg/m3。
(3)关于该密度秤的刻度特点下列判断正确的有哪些 。
A.该密度秤的刻度不均匀
B.该密度秤的刻度左大右小
C.秤砣质量变小密度秤的精度变高
D.秤砣质量变大密度秤的量程变大
29.小江在做“研究杠杆平衡条件”的实验中,进行了如下一系列操作:
a.把杠杆的中点支在支架上。
b.把钩码挂在杠杆的两边,改变钩码的位置使杠杆在水平位置平衡。
c.求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值。
d.改变力和力臂的数值,做三次实验;
e.记下两边钩码的重,用尺量出它们的力臂,记下实验数据;
f.调节平衡螺母,使杠杆在水平位置平衡。
(1)请你补充完整正确的实验操作顺序:a﹣f﹣ ﹣c。
(2)实验中所用钩码的质量均相等,如图甲所示,杠杆在水平位置平衡;若再给两边各挂上一个钩码,则杠杆将 (填“仍平衡”“左端下沉”或“右端下沉”)。
(3)实验中保持钩码个数和位置不变,弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,如图乙所示,则下列能描述测力计示数F与θ关系的图像是 。
四.解答题(共5小题)
30.如图所示,杆OA长为0.5米,O端用铰链铰于竖直墙面,杆中B处有一制动闸,OB为0.2米,闸厚d为0.04米,轮子C的半径R为0.2米,闸与轮间动摩擦因数μ为0.5.飞轮顺时针转动时,要对轮施加力矩(力×力臂)1000牛米才能使轮减速而制动,若杆与闸的重力不计,则在杆的A端需加垂直于杆的力F的大小为 牛。
31.如图所示,在住宅中通常用固定在墙上的三角支架ABC放置空调外机。如果A处固定的螺钉脱落,则支架会倾翻造成空调外机坠落事件。已知AB长80cm,AC长50cm,室外机的重力为500N,重力作用线正好经过AB中点。
(1)在图中画出三角支架A处所受的水平作用力F的示意图及其力臂。
(2)计算三角支架A处所受的水平作用力F的大小(支架重力不计)。
(3)为了避免A处螺钉受力太大而脱落,导致支架倾翻空调外机坠落,安装师傅会将室外机向 (填“A”或“B”) 靠近一些,理由是 。
32.为深入探究平衡木的平衡,小萍设计了如图装置。轻质杠杆AOB可绕支点O无摩擦转动,且AB=3m,OA=1m。在杠杆A端用不可伸长的细线悬挂正方体M,重力为1000N,边长为50cm。当重为500N的小萍静止站立在OB之间某处时,杠杆处于水平平衡状态。
(1)正方体M的密度;
(2)如图所示,小萍站立在距离B端1.5m处时,正方体M对水平地面的压强;
(3)若细线能承受的最大拉力为800N,小萍由O点向B以10cm/s的速度缓慢匀速行走,求小萍能安全行走的时间。
33.如图是同学们利用实验室器材,组合成的监控水库水位的模拟装置,整个装置是由长方体A和B、滑轮组、轻质杠杆CD、台秤等组成。杠杆始终在水平位置平衡。
已知OC:OD=1:2,A的高度为50cm,底面积400cm2,重为550N,动滑轮重50N,B重300N,不计绳重与摩擦。求:
(1)水位上涨到A的上表面时,A受到的浮力;
(2)在台秤的刻度盘上刻上反映水位的刻度,当水位下降时,台秤示数会 ,请说明理由 ;
(3)当柱体A有五分之二高度露出水面时,台秤处显示的压力为多大?
34.如图是上肢力量健身器示意图。杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为90N。重力为500N的健身者通过细绳在B点施加400N竖直向下的拉力时,杠杆在水平位置平衡,配重对地面的压力恰好为零。(杠杆AB、绳重及摩擦均忽略不计)。
(1)健身过程中,配重被拉起时,健身器中的滑轮为 (选填“定滑轮”或“动滑轮”)。
(2)求配重对地面的压力恰好为零时A点受到的拉力。
(3)求滑轮的重力。
五.计算题(共2小题)
35.如图所示,将长为1.2米的轻质木棒(重力忽略不计)平放在水平方形台面上,左右两端点分别为A、B,它们距台面边缘处的距离均为0.3米。在A端挂一个重为30牛的物体,在B端挂一个重为G的物体。
(1)若G=30牛,台面收到木棒的压力为多少?
(2)若要使木棒右端下沉,B端挂的物体至少要大于多少?
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为多少?
36.为完成某水下工程,施工队要把一个圆柱体工件从水中提起。通过技术分析,采用质量为2吨、每个车轮与水平地面的接触面积为200cm2的四轮小型牵引车,通过牵引滑轮组匀速打捞起水中的圆柱体工件,小型牵引车始终保持2m/s不变的速度牵引,如图(a)所示。在打捞的过程中,小型牵引车的拉力功率P随打捞时间t的变化如图(b)所示。已知动滑轮重为200N,不计绳子与滑轮间的摩擦,g取10N/kg,试计算:
(1)在打捞的过程,小型牵引车对水平地面施加的压强是多少?
(2)在圆柱体工件没有露出水面前,所受到的浮力是多少?
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,滑轮组的机械效率是多少?
参考答案与试题解析
一.选择题(共20小题)
1.人踮脚时脚掌可以看作一个杠杆,下列能正确表示踮脚时该杠杆的支点、动力和阻力的示意图是( )
A. B.
C. D.
【解答】解:踮起脚时,脚尖O为支点,人的重力落在脚掌中为阻力,脚干对脚跟的拉力为动力,动力臂大于阻力臂,是一个省力杠杆;如A。
故选:A。
2.在“探究杠杆的平衡条件”的实验中,所用杠杆质量分布均匀,钩码质量相同,下列说法正确的是( )
A.甲图中杠杆若右端低,则右端螺母应该向右调节
B.从乙图杠杆平衡状态到丙图,拉力F的力臂变大
C.从乙图杠杆平衡状态到丙图,弹簧秤示数不变
D.丙图中改为沿虚线方向拉,弹簧秤示数不变
【解答】解:A、实验前没有挂钩码和弹簧测力计时,发现杠杆左端高右端低,说明杠杆的重心在支点右侧,要使其在水平位置平衡,应将杠杆左端的平衡螺母向左调节,故A错误;
B、C、做实验时杠杆已达到平衡,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂变小,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,根据杠杆平衡条件F1L1=F2L2分析可知动力是不变的,故B错误,C正确;
D、丙图中改为沿虚线方向拉时,阻力及阻力臂不变,拉力力臂变大,根据杠杆平衡条件可知拉力变小,故D错误。
故选:C。
3.如图中的皮划艇运动员一手支撑住桨柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B.
C. D.
【解答】解:由题意可知,撑住桨柄的末端为支点,下面的手给浆向后的力,这时水给浆一个向前的力,所以船前进。
故选:B。
4.如图所示,O为杠杆的支点,A点悬挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
【解答】解:由图可知,O为支点,A点挂一重物,阻力方向向下,为使杠杆在水平位置平衡,在B点施加一个力,则动力F与杠杆垂直且方向向下,
要使该力最小,由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;
由图可知,BQ对应的动力臂最长,所以该力应沿BQ方向。
故选:D。
5.我国古代《墨经》最早记述了秤的杠杆原理(如图所示),此时杠杆处于平衡状态(忽略杆的质量),有关它的说法正确的是( )
A.杠杆在图示的位置平衡时,“权”的质量小于“重”的质量
B.“权”和“重”增加相同的质量,A端会上扬
C.增大“重”时,应把“权”向B端适当移动
D.若将提纽O向B端移动一些,杆秤的测量范围将变小
【解答】解:A、杠杆在图示的位置平衡时,根据杠杆平衡条件可得“权”ד标”=“重”ד本”,由图可知“标”大于“本”,则“权”的质量小于“重”的质量,故A正确;
B、设增加的质量为Δm,由图可知,杠杆平衡时“标”大于“本”,则Δmד标”>Δmד本”即“权+Δm”ד标”>“重+Δm”ד本”,A端会下沉,故B错误;
C、在“权”不变时,“重”增大,需要“标”增大,即把“权”向A端适当移动,故C错误;
D、将提纽O向B端移动一些,“标”增大,则“权”和“标”的乘积增大,而“本”变小,由杠杆平衡可知“重”增大,即杆秤测量范围增大,故D错误。
故选:A。
6.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力,欲使其一端抬离地面。则( )
A.F甲>F乙,因为乙方法的动力臂长
B.F甲<F乙,因为甲方法的阻力臂短
C.F甲>F乙,因为甲方法的动力臂短
D.F甲=F乙,因为动力臂都是阻力臂的2倍
【解答】解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力为F,阻力均为水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以动力臂都等于阻力臂的2倍;
根据杠杆的平衡条件可得:F==G,所以前后两次所用的力相同,故ABC错误,D正确。
故选:D。
7.如图所示,轻质杠杆AB可绕O点自由转动。当杠杆A端的甲物块悬空;B端的乙球浸没在水中时(不碰容器底和壁),杠杆恰好水平平衡,A、B两端的细线均不可伸长且处于张紧状态。已知OA:OB=1:2,甲物块重400N,乙球体积为1×10﹣2m3,g取10N/kg。下列说法中正确的是( )
A.乙球受到的浮力为10N
B.杠杆B端所受的拉力为100N
C.乙球的重力为300N
D.乙球的密度为2×103kg/m3
【解答】解:A、根据阿基米德原理,乙球浸没在水中受到的浮力:F浮=ρ水gV排=1×103kg/m3×10N/kg×10﹣2m3=100N,故A错误;
B、杠杆B端所受的拉力为F′,杠杆恰好水平平衡。根据杠杆的平衡条件:G甲×OA=F′×OB;即F′===200N,故B错误;
C、杠杆B端所受的拉力为F′,根据物体间力的作用是相互的,则乙球受到杠杆B端的拉力大小也为F′,乙球浸没在水中时处于平衡状态,G乙=F′+F浮=200N+100N=300N,故C正确;
D、由C我们知道G乙=300N,根据密度的公式:ρ乙====3×103kg/m3,故D错误。
故选:C。
8.如图,OAB是杠杆,OA与杆AB垂直,在OA的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力可能为10N
D.作用点在B点的最小动力小于10N
【解答】解:AB、由图知,使用该杠杆时阻力为重物对杠杆的拉力,其大小其等于物重G,阻力臂(图中支点O到阻力作用点的距离)是确定的,但只知道动力的作用点在B点,不知道动力作用的方向,所以也就不知道动力臂的大小,则无法比较动力臂和阻力臂的大小关系,无法确定它属于哪种类型的杠杆,故AB错误;
CD、由图知,当加在B点的动力F垂直于OB向上时,支点与动力作用点之间的连线OB就是最长的动力臂,此时动力最小;因为C点是OA的中点,所以结合数学知识可知OB>OA=2OC;
根据杠杆的平衡条件可得F×OB=G×OC,
则作用点在B点的最小动力:F==G=×20N=10N,故C错误,D正确。
故选:D。
9.一根轻质杠杆可绕O点转动,在杠杆的中点挂一重物G,在杆的另一端施加一个方向始终保持水平的力F,如图。力F使杆从所示位置慢慢抬起的过程中,力F和它的力臂LF、重力G和它的力臂LG的变化情况( )
A.F增大,LF减小 B.F减小,LF增大
C.G不变,LG减小 D.G不变,LG不变
【解答】解:根据力臂的概念做出力F和重力G的力臂,如图所示:
使杠杆从图中所示位置慢慢抬起的过程中,重物的重力不变但力臂LG变大,F的力臂LF变小;
根据杠杆平衡条件F LF=G LG可得:F=,则F一直在增大,故A正确,BCD错误。
故选:A。
10.如图是一款可以调节锅内温度大小的高压锅保险阀门原理图,其本质是一根以O为支点的杠杆。当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,若需要减小锅内的最高温度,则需要( )
A.增大重物质量,并将重物向左移动
B.增大重物质量,并将重物向右移动
C.减小重物质量,并将重物向左移动
D.减小重物质量,并将重物向右移动
【解答】解:当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,重物阻碍杠杆向上移动,若需要减小锅内的最高温度,则阻力、阻力臂需要减小,故减小重物质量,并将重物向左移动。
故选:C。
11.如图所示,在水平拉力F的作用下重100N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10N,则拉力F的大小为( )N,物体A与水平桌面的摩擦力大小( )N。
A.200N;10N B.200N;20N C.20N;10N D.20N;20N
【解答】解:如图所示,弹簧测力计B测出了动滑轮上的绳子上的拉力为10N;则物体A受到拉力为10N;又因物体A做匀速直线运动,则物体A与水平桌面的摩擦力与物体A受到拉力是一对平衡力,则摩擦力大小也是10N;
拉力F=2f=2×10N=20N。
故选:C。
12.某同学模拟建筑工地上拉动工件的情景,设置了如图所示的滑轮组,每个滑轮重10牛。并用该滑轮组将一个重为100牛的物体沿水平面匀速拉动2米,物体移动时受到地面对物体的摩擦力为35牛。不计绳重和机械摩擦,人对绳端的拉力为( )
A.22.5牛 B.50牛 C.55牛 D.60牛
【解答】解:由图知,n=2,不计绳重和机械摩擦,
F=(G动+f)=×(10N+35N)=22.5N。
故选:A。
13.如图所示,用三种不同的方式分别拉同一物体在水平地面上做匀速直线运动,所用拉力分别为F1、F2和F3,则它们的大小关系正确的是( )(不计滑轮重和绳子与滑轮之间的摩擦)
A.F3<F1<F2 B.F1<F2<F3 C.F2<F1<F3 D.F3<F2<F1
【解答】解:不计滑轮重和绳子与滑轮之间的摩擦:
假设物块与地面的摩擦力为f,
左滑轮为定滑轮,F1处于绳端,所以F1=f;
中滑轮为动滑轮,F2处于绳端,则F2=f;
右滑轮为动滑轮,滑轮、物体匀速运动,滑轮受到向左的力2f等于向右的拉力F3,即F3=2f;
故F2<F1<F3。
故选:C。
14.如图所示,用三种方法拉动同一物体以相等速度v匀速上升相同的高度h。拉力F1、F2、F3的功率分别是P1、P2、P3,绳子自由端移动的速度分别为v1、v2、v3。不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。则下列判定正确的是( )
A.F1<F2<F3 B.v1>v2>v3 C.P1>P2>P3 D.P1=P2=P3
【解答】解:由题意可知,用三种方法拉动同一物体以相等速度v匀速上升相同高度h,不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。
甲图:滑轮为动滑轮,动滑轮能省一半的力,则此时拉力F1=G;但是多费1倍的距离,则拉力作用点移动的速度v1=2v;
乙图:滑轮为动滑轮,但拉力的作用点在动滑轮的轴上,因此是一个费力杠杆,多费1倍的力,省一半的距离,因此F2=2G,拉力作用点移动的速度v2=v;
丙图:滑轮为定滑轮,定滑轮不能省力,且不计滑轮重及摩擦,则此时拉力F3=G;拉力作用点移动的速度v3=v;
由以上分析可知:F1<F3<F2,v1>v3>v2;
根据P===Fv可知,拉力的功率分别为:
P1=F1v1=G×2v=Gv,
P2=F2v2=2G×v=Gv,
P3=F3v3=G×v=Gv,
所以拉力F1、F2、F3的功率P1=P2=P3,故ABC错误,D正确。
故选:D。
15.如图所示装置中,若拉力F=4N,则甲、乙两弹簧的读数分别为( )
A.8N,8N B.12N,8N C.8N,12N D.12N,12N
【解答】解:由图知,滑轮组承担左边拉力的绳子股数n=3,不计滑轮、弹簧秤及轻绳的质量,拉力F=F左,
滑轮组受到水平向左的拉力F左=3F=3×4N=12N,根据力的相互作用性可知,甲弹簧秤的读数为12N;
滑轮组承担右边拉力的绳子股数n=2,不计滑轮、弹簧秤及轻绳的质量,拉力F=F右,
滑轮组受到水平向右的拉力F右=2F=2×4N=8N,根据力的相互作用性可知,乙弹簧秤的读数为8N。
故选:B。
16.如图所示,湖水中有两艘小船,绳子的一端拴在甲船上,乙船上固定着滑轮,绳子绕过滑轮,站在甲船上的人用100N的力拉绳子的自由端。如果在20s内甲船向右匀速移动了10m,同时乙船向左匀速移动了4m,则人对绳子的力做功的功率是( )
A.50W B.140W C.30W D.70W
【解答】解:甲船向右移动了10m,乙船向左移动了4m,以甲为参照物乙向左移动了10m+4m=14m,有两段绳子拉乙船,故绳子自由端总共移动s=14m×2=28m;
故人拉绳子的功率P====140W。
故选:B。
17.如图所示,竖直固定的测力计下端挂一个滑轮组,滑轮组下端挂有物体B,滑轮组绳的末端通过定滑轮沿水平方向与物体A相连。此时物体A在绳的水平拉力作用下向左做匀速直线运动,此时测力计的示数为450N;在物体B下加挂重为60N的物体C后,用水平向右的力F拉动物体A可使其沿水平桌面向右做匀速直线运动,此时物体B上升的速度大小为5cm/s.已知每个滑轮重均为50N,若不计绳重及滑轮的摩擦,g取10N/kg,则下列说法中正确的是( )
A.物体A所受滑动摩擦力大小为100N
B.水平向右的力F的大小为400N
C.物体B所受重力为400N
D.拉力F做功的功率为63W
【解答】解:由题意得:450N=50N+(50N+GB)
即B的重力:GB=550N;
则A物体所受摩擦力为×(50N+550N)=200N;
水平向右的力:F=×(50N+60N+550N)+200N=420N;
因为B上升的速度为0.05m/s,所以A的速度为3×0.05m/s=0.15m/s,
P=Fv=420×0.15=63W。
故选:D。
18.如图所示,用40N的力F沿水平方向拉滑轮,可使重20N的物体A以0.3m/s的速度在水平面上匀速运动:物体B重10N,弹簧测力计的示数恒为10N(不计滑轮、测力计、绳子的重量,滑轮的转轴光滑)。下列说法不正确的是( )
A.物体A受到地面的摩擦力是10N
B.滑轮移动的速度是0.15m/s
C.水平拉力F的功率是6W
D.在2s内绳子对物体A做的功为6J
【解答】解:
A、不计滑轮的摩擦和重力,以动滑轮为研究对象,则两段绳子向右的拉力与向左的拉力平衡,所以2F拉=F,则A物体对滑轮的拉力F拉=F=×40N=20N;力的作用是相互的,所以滑轮对A的拉力也为20N;
弹簧测力计的示数恒为10N,因拉滑轮时,物体B始终处于静止状态,则测力计对B向右的拉力与A对B向左的摩擦力平衡,所以fA对B=F示=10N;力的作用是相互的,所以,物体B对A的摩擦力为10N,方向向右;
物体A向左匀速运动,同时地面对物体A还有向右的摩擦力,由力的平衡条件可得:F拉=fB对A+f地,
f地=F拉﹣fB对A=20N﹣10N=10N,物体A受到地面的摩擦力是10N,故A正确;
B、A移动的速度即绳端移动的速度为0.3m/s,所以滑轮的移动速度为×0.3m/s=0.15m/s,故B正确;
C、水平拉力F的功率为:P===Fv=40N×0.15m/s=6W,故C正确;
D、绳子对物体A的拉力是20N,2s物体A移动的距离为sA=vAt=0.3m/s×2s=0.6m,
所以在2s内绳子对物体A做的功:W=F拉sA=20N×0.6m=12J,故D错误。
故选:D。
19.图中a、b、c为三个物块,M、N为两个轻质弹簧,R为跨过光滑定滑轮的轻绳,它们连接如图并处于平衡状态。则以下说法正确的个数是( )
①有可能N处于拉伸状态而M处于压缩状态
②有可能N处于压缩状态而M处于拉伸状态
③有可能N处于不伸不缩状态而M处于拉伸状态
④有可能N处于拉伸状态而M处于不伸不缩状态。
A.一个 B.二个 C.三个 D.四个
【解答】解:(1)对于弹簧N,因上端与绳子连接,因为绳子只能承受拉力而不能承受压力,故弹簧N可能处于拉伸或原长,不可能处于压缩状态,故②错误;
(2)以a为研究对象,若N处于拉伸状态,则a受绳子向上的拉力,M可能拉伸、可能压缩也可能处于原长,故①④正确;
(3)若N处于原长,则绳子对a无拉力,则M一定处于压缩状态,故③错误。
因此正确的说法有①④,正确的说法有两个。
故选:B。
20.如图甲所示的滑轮组装置,不计绳重和摩擦,绳对滑轮的拉力方向均为竖直方向。用该滑轮组提升放置在水平地面上重为G=80N的重物到高处。用竖直向下的拉力拉绳的自由端,拉力F随时间t变化的图像如图乙所示,重物上升的速度v随时间t变化的图像如图丙所示。已知在2s 4s内重物上升的竖直高度为2m,则下列说法错误的是( )
A.动滑轮重为20N
B.0 2s内重物对地面的压力为40N
C.2 4s内,绳自由端下降的平均速度为2m/s
D.4 6s内,拉力F的功率为100W
【解答】解:A、由图甲可知,连接动滑轮绳子的股数n=2,由丙图可知,物体在4s~6s内做匀速直线运动,由图乙可知此时的拉力FF3=50N,
不计绳重和摩擦,则由F=(G+G动)得,动滑轮的重力:
G动=nF3﹣G物=2×50N﹣80N=20N;故A正确;
B、在0~2s内,物体的运动速度为零,即物体静止在地面上,
由图乙可知此时的拉力F1=30N,
把动滑轮和重物看成整体,则这个整体受到向下的总重力、向上的支持力以及2股绳子向上的拉力而处于静止状态,
由力的平衡条件得:
F支+2F1=G物+G动,
则地面对物体的支持力:
F支=G物+G动﹣2F1=80N+20N﹣2×30N=40N,
根据力的作用是相互的可知,此过程中重物对地面的压力:
F压=F支=40N;故B正确;
C、已知在2s~4s内重物上升的竖直高度为2m,
则绳子自由端移动的距离:
s=nh=2×2m=4m,
所用的时间:
t=4s﹣2s=2s,
则在2s~4s内,绳自由端下降的平均速度vB===2m/s,故C正确;
D、由图丙可知,在4s~6s内,重物做匀速直线运动,其速度v=nv3=2×2.0m/s=4.0m/s,
拉力做功的功率:P===Fv=50N×4.0m/s=200W,故D错误。
故选:D。
二.填空题(共7小题)
21.用好科学知识有利于轻松出行。如图为小科使用的拉杆旅行箱,装有物品的旅行箱整体可视为杠杆,O为支点,B为重心,A为拉杆的端点,在A点沿图示方向施加拉力F使旅行箱保持静止。
(1)其他条件不变时,仅缩短拉杆的长度,拉力F会 增大 (选填“增大”“不变”或“缩小”)。
(2)生活中常把箱内物体整体的重心以 B→B' (选填“B→B'”或“B'→B”)转移,在其他条件不变时,拉力F会减小。
【解答】解:(1)其他条件不变时,仅缩短拉杆的长度,根据图中知,动力臂会减小,在阻力和阻力臂不变,动力臂越小,拉力F会增大;
(2)根据动力臂和阻力不变,阻力臂越小,动力越小知,生活中常把箱内物体整体的重心以B→B'转移,使得重力的力臂减小,在其他条件不变时,拉力F会减小。
故答案为:(1)增大;(2)B→B'。
22.小乐用竖直向上的拉力F拉着一个重为200N的行李箱,行李箱保持静止。如图所示为此时行李箱所受拉力F和重力G的示意图,其中O为滚轮的转轴(不计此处摩擦),OA=10cm,AB=30cm,则拉力F的大小为 50 N。若小乐沿MN箭头方向施加拉力,行李箱能否继续保持静止?判断并说明理由。 不能;拉力和重力都是使得箱子顺时针转动,箱子无法保持静止。 。
【解答】解:可以将行李箱看成是一个杠杆,支点为O,F为动力,箱子的重力为阻力,动力臂等于OB=OA+AB=10cm+30cm=40cm,阻力臂为OA=10cm;
由杠杆的平衡条件可得:F1LB=GLA,
则:F1===50N;
若小乐沿MN箭头方向施加拉力,行李箱重力使得箱子顺时针转动,此时的拉力也使得箱子顺时针转动,没有阻碍箱子转动的力,因而不能保持静止。
故答案为:50;不能;拉力和重力都是使得箱子顺时针转动,箱子无法保持静止。
23.如图为“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=2OB,G1=10牛,杠杆自身重力和摩擦不计,固定装置未画出。
(1)当杠杆处于甲图所示水平位置平衡时,G2的重力为 20 牛;
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(OB'=OB),保持G1位置不变,要使杠杆在图乙位置保持平衡,则G2的悬挂点应该移动至 ② 点处(选填“①”、“②”或“③”)。若不移动,则A端将 下降 (选填“上升”或“下降”)。
【解答】解:
(1)如图甲,杠杆在水平位置平衡,
由杠杆平衡条件得:G1×OA=G2×OB,
即:10N×0.2m=G2×0.1m,
解得:G2=20N;
(2)保持G1位置不变,即左边的力和力臂不变;G2不变,要使杠杆在图乙位置保持平衡,应该使右边的力臂不变;原来G2的力臂为OB,所以G2应该移动到②点处;
若不移动,杠杆左侧力与力臂的乘积大于右侧的力与力臂的乘积,此时杠杆A端下降。
故答案为:(1)20;(2)②,;下降。
24.如图所示,F1=8N,F2=6N,此时物体A相对于地面静山,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。
(1)弹簧测力计读数为 18 N。
(2)物体A和地面之间的摩擦力 4 N。
(3)如果增大F2,物体A是否有可能向左运动?请说明理由 不可能,AB间,以及A与地面间摩擦力不变,A仍旧静止 。
【解答】解:(1)不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦,由力的平衡条件可得,弹簧测力计的示数F=3F2=3×6N=18N;
(2)由图知,水平使用滑轮组,n=2,fB=2F2=2×6N=12N,根据B向左做匀速直线运动可知物体A对B的摩擦力的方向向右,根据力的作用是相互的可知物体B对物体A的摩擦力向左,大小为12N;
物体A做匀速直线运动,受到的合力为0,因此物体A和地面之间的摩擦力:F4=F3﹣F1=12N﹣8N=4N;
(3)如果增大F2,B将做加速运动,B对A的压力和接触面的粗糙程度不变,B与A之间的摩擦力不变,A受力不变,同理可知,A受到地面的摩擦力也不变,即A的受力情况不变,还是处于静止状态。
故答案为:(1)18; (2)4; (3)不可能,AB间,以及A与地面间摩擦力不变,A仍旧静止。
25.图甲是脚踏式翻盖垃圾桶的实物图,通过两个水平杠杆组合实现脚踏翻盖,图乙为这两个杠杆AO1B和DCO2的示意图。已知桶盖重5N,重心位于DC中点的正上方,AO1=30cm,O1B=20cm,桶盖和连接杆的尺寸如图乙所示,脚踏杆AO1B和竖直连接杆BC的质量不计。
(1)杠杆DCO2阻力臂长度为 30cm ;
(2)若要把桶盖翻开,脚对踏板A处的压力至少为 20N 。
【解答】解:设顶杆对桶盖上C点的作用力为F2,EO2=EC+CO2=×50cm+5cm=30cm,
根据杠杆平衡条件可得:G×EO2=F2×CO2﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣②
根据力的作用是相互的可知:F1=F2,
则得:=,
所以,F=×G=×5N=20N。
故答案为:(1)30cm;(2)20。
26.如图所示,物体A重为200N,C、D滑轮重均为30N。物体B重为120N,它恰好能拉着A向右匀速运动,不计滑轮与绳子间摩擦。
(1)图中D为 动 (填“定”或“动”)滑轮。
(2)现用水平向左的拉力F作用于物体A上,使物体B匀速上升,则拉力F的大小为 150 N。
【解答】解:(1)由图可知,D滑轮随物体一起运动,因此D滑轮是动滑轮;C滑轮固定不动,因此C滑轮是定滑轮;
(2)由图可知,承担物重的绳子股数n=2,不计滑轮与绳子间摩擦,绳子自由端的拉力:F绳=(GB+G动)=×(120N+30N)=75N;
物体A匀速运动,则拉力和摩擦力是一对平衡力,所以物体A所受摩擦力:f=F绳=75N,
用一水平向左的力F拉动物体A,使物体B匀速上升,此时物体A受到摩擦力方向水平向右,由于压力和接触面的粗糙程度不变,所以摩擦力大小不变,
此时拉力:F=f+F绳=75N+75N=150N。
故答案为:(1)动;(2)150。
27.如图所示,每个滑轮重20牛,质量为60kg的人,站在质量为30kg的吊篮内,人至少用 220 N的拉力拉住绳子,才能使自己和吊篮在空中保持静止。(不计绳重及摩擦)
【解答】解:如图所示:
人和吊篮的总质量:
m=60kg+30kg=90kg,
人和吊篮受到的重力:
G=mg=90kg×10N/kg=900N,
有:2F+F1=G,F1=2F+G定,
则4F+G定=G,4F+20N=900N;
F=220N
故答案为:220。
三.实验探究题(共2小题)
28.如图所示是一个自制密度秤,其外形和杆秤差不多。其左端A点挂一个质量为0.2kg、体积为25cm3的铁块。提纽位于O处,秤砣放在B处时,秤杆恰好水平平衡。已知秤砣的质量为0.1kg,AO=5cm,BO=10cm。把铁块浸没在待测密度的液体中时,移动秤砣便可直接在杆上读出液体的密度。
(1)密度秤零刻度在O点右侧 10 cm处。
(2)现将铁块浸没在待测液体中,秤砣左移1.5cm到C点时,杠杆在水平位置重新平衡,则待测液体的密度为 1.2×103 kg/m3。
(3)关于该密度秤的刻度特点下列判断正确的有哪些 BCD 。
A.该密度秤的刻度不均匀
B.该密度秤的刻度左大右小
C.秤砣质量变小密度秤的精度变高
D.秤砣质量变大密度秤的量程变大
【解答】解:(1)已知OA=5cm=0.05m,OB=10cm=0.1m,
假设秤杆的重心到O点的距离为L,则有:G铁OA=G秤杆L+G秤砣OB,
即0.2kg×10N/kg×0.05m=G秤杆L+0.1kg×10N/kg×0.1cm,
解得:G秤杆L=0,则可知秤杆的重心在O点处;
如图甲所示,铁块没有浸在任何液体中,即可视为其测量的液体密度为0,则此时秤砣所处的位置B点即为该密度秤的0刻度处;
(2)当铁块浸没在液体中时,铁块排开液体的体积为V排=V铁=25cm3=2.5×10﹣5m3;
秤砣移到了C处,则OC=10cm﹣1.5cm=8.5cm=0.085m;
根据杠杆的平衡条件、阿基米德原理有:(G铁﹣F浮)OA=G秤砣OC,
即(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=0.1kg×10N/kg×0.085m,
解得:ρ液=1.2×103kg/m3;
(3)设秤砣到O点的距离为L′,液体的密度为ρ液′,液体所受的浮力为F浮′,
则有:(G铁﹣F浮′)OA=G秤砣L′,即(0.2kg×10N/kg﹣ρ液′×10N/kg×2.5×10﹣5m3)×0.05m=0.1kg×10N/kg×L′,
解得:ρ液′=8×103kg/m3﹣8×104kg/m4L′,
由此可知密度秤的刻度是均匀的,该密度秤的刻度左大右小,故A错误,B正确;
根据(G铁﹣F浮′)OA=(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=G秤砣L′可知秤砣质量变小密度秤的精度变高,故C正确;
根据(G铁﹣F浮′)OA=(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=G秤砣L′可知秤砣质量变大密度秤的量程变大,故D正确。
故答案为:(1)10。(2)1.2×103kg/m3;(3)BCD。
29.小江在做“研究杠杆平衡条件”的实验中,进行了如下一系列操作:
a.把杠杆的中点支在支架上。
b.把钩码挂在杠杆的两边,改变钩码的位置使杠杆在水平位置平衡。
c.求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值。
d.改变力和力臂的数值,做三次实验;
e.记下两边钩码的重,用尺量出它们的力臂,记下实验数据;
f.调节平衡螺母,使杠杆在水平位置平衡。
(1)请你补充完整正确的实验操作顺序:a﹣f﹣ b﹣e﹣d ﹣c。
(2)实验中所用钩码的质量均相等,如图甲所示,杠杆在水平位置平衡;若再给两边各挂上一个钩码,则杠杆将 右端下沉 (填“仍平衡”“左端下沉”或“右端下沉”)。
(3)实验中保持钩码个数和位置不变,弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,如图乙所示,则下列能描述测力计示数F与θ关系的图像是 B 。
【解答】解:(1)探究杠杆平衡条件的实验时,首先把杠杆支在支架上,调节平衡螺母使杠杆在水平位置平衡,再挂钩码进行实验,记下两边钩码的重,用尺量出它们的力臂,记下实验数据,然后改变力和力臂的数值,做三次实验,最后总结杠杆平衡条件,故正确的实验操作顺序:a﹣f﹣b﹣c﹣d﹣c。
(2)若每个钩码重G,每个小格长L,如图甲所示,当杠杆平衡后,在A、B两点下方同时增加一个相同的钩码,则有4G×2L<3G×3L,左侧力与力臂的乘积小于右侧,故右端下沉;
(3)当测力计和杠杆的角度从0度逐渐增加到90度时,动力臂越来越大,动力越来越小,当测力计和杠杆垂直时,此时动力臂最大,动力最小,当测力计和杠杆的角度从90度逐渐增加到180度时,角度越大,动力臂越小,动力越大;由于θ不能达到180°,故选:B。
故答案为:(1)b﹣c﹣d;(2)右端下沉;(3)B。
四.解答题(共5小题)
30.如图所示,杆OA长为0.5米,O端用铰链铰于竖直墙面,杆中B处有一制动闸,OB为0.2米,闸厚d为0.04米,轮子C的半径R为0.2米,闸与轮间动摩擦因数μ为0.5.飞轮顺时针转动时,要对轮施加力矩(力×力臂)1000牛米才能使轮减速而制动,若杆与闸的重力不计,则在杆的A端需加垂直于杆的力F的大小为 4400 牛。
【解答】解:∵能使轮减速而制动时对轮施加力矩为1000牛米,即fR=1000N m,
∴f==5000N.闸对轮子
∵闸与轮间动摩擦因数μ为0.5,
∴由f=μN得:闸对轮子的压N===10000N,
根据力的作用是相互的可知:B点受到的竖直向上的支持力F2=N=10000N,
由于杠杆OAB受A端垂直于杆向下的力F、B点受到的竖直向上的支持力F2和轮子对它的水平向右的摩擦力f的作用,
则根据杠杆平衡条件得:FOA=F2OB+fd,
F===4400N。
故答案为:4400。
31.如图所示,在住宅中通常用固定在墙上的三角支架ABC放置空调外机。如果A处固定的螺钉脱落,则支架会倾翻造成空调外机坠落事件。已知AB长80cm,AC长50cm,室外机的重力为500N,重力作用线正好经过AB中点。
(1)在图中画出三角支架A处所受的水平作用力F的示意图及其力臂。
(2)计算三角支架A处所受的水平作用力F的大小(支架重力不计)。
(3)为了避免A处螺钉受力太大而脱落,导致支架倾翻空调外机坠落,安装师傅会将室外机向 A (填“A”或“B”) 靠近一些,理由是 根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小 。
【解答】解:(1)由图知C为支点,空调机压力使得杠杆顺时针转动A点的拉力阻碍转动,因而必须水平向左;根据力臂是从支点到力的作用线距离,画图如图;
由杠杆的平衡条件知:
F AC=G AB
即 F×50cm=500N××80cm
解得:F=400N。
(3)根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小,安装师傅会将室外机向A靠近一些。
答:(1)见解答图;
(2)三角支架A处所受的水平作用力F的大小为400N;
(3)A;根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小。
32.为深入探究平衡木的平衡,小萍设计了如图装置。轻质杠杆AOB可绕支点O无摩擦转动,且AB=3m,OA=1m。在杠杆A端用不可伸长的细线悬挂正方体M,重力为1000N,边长为50cm。当重为500N的小萍静止站立在OB之间某处时,杠杆处于水平平衡状态。
(1)正方体M的密度;
(2)如图所示,小萍站立在距离B端1.5m处时,正方体M对水平地面的压强;
(3)若细线能承受的最大拉力为800N,小萍由O点向B以10cm/s的速度缓慢匀速行走,求小萍能安全行走的时间。
【解答】解:(1)由G=mg可得,正方体M的质量:
mM===100kg,
则正方体M的密度:
ρM===0.8×103kg/m3;
(2)小萍站立在距离B端L1=1.5m处时,由杠杆的平衡条件可得:
FA OA=G人 (AB﹣OA﹣L1),
即:FA×1m=500N×(3m﹣1m﹣1.5m),
解得:FA=250N,
由力作用的相互性可知,绳子对正方体M的拉力FA′=FA=250N,
正方体M对水平地面的压力:
F=GM﹣FA′=1000N﹣250N=750N,
正方体M对水平地面的压强:
p===3000Pa;
(3)细线能承受的最大拉力为800N,设细线达到800N时,小萍距离O点的距离为L2,
由杠杆的平衡条件可得:
FA大 OA=G人 L2,即800N×1m=500N×L2,
解得:L2=1.6m=160cm,
由v=可得,小萍能安全行走的时间:
t===16s。
答:(1)正方体M的密度为0.8×103kg/m3;
(2)小萍站立在距离B端1.5m处时,正方体M对水平地面的压强为3000Pa;
(3)小萍能安全行走的时间为16s。
33.如图是同学们利用实验室器材,组合成的监控水库水位的模拟装置,整个装置是由长方体A和B、滑轮组、轻质杠杆CD、台秤等组成。杠杆始终在水平位置平衡。
已知OC:OD=1:2,A的高度为50cm,底面积400cm2,重为550N,动滑轮重50N,B重300N,不计绳重与摩擦。求:
(1)水位上涨到A的上表面时,A受到的浮力;
(2)在台秤的刻度盘上刻上反映水位的刻度,当水位下降时,台秤示数会 变小 ,请说明理由 物体受到的浮力减小,C端绳子的拉力增大,根据杠杆的平衡条件可知当动力臂和阻力臂不变时;杠杆右侧对B的拉力增大,台秤示数减小 ;
(3)当柱体A有五分之二高度露出水面时,台秤处显示的压力为多大?
【解答】解:(1)A的高度为50cm,底面积400cm2,
当水位上涨到A的上表面时,A浸没在水中,所以V排=VA=Sh=50cm×400cm2=20000cm3=0.02m3,
所以A受到的浮力:F浮=ρ水gV排=1.0×103kg/m3×10N/kg×0.02m3=200N;
(2)当A物体露出水面时,V排′=VA=VA=×0.02m3=0.012m3,
物体A此时受到的浮力:F浮′=ρ水gV排=1.0×103kg/m3×10N/kg×0.012m3=120N,
物体A受到浮力和滑轮组的拉力与A的重力平衡,
所以物体A对滑轮组拉力F=GA﹣F浮′=550N﹣120N=430N,
根据力的作用的相互性可知,滑轮组绳子自由端对杠杆C端拉力与杠杆C端受到拉力大小相等,
不计绳重与摩擦,所以绳子对C端拉力FC=(F+G动)=×(430N+50N)=160N,
杠杆始终在水平位置平衡,O为支点,由杠杆平衡条件有:Fc OC=FD OD,
即:160N×OC=FD×OD,且OC:OD=1:2,
解得绳子对D端拉力:FD=80N,
所以B物体受到拉力为80N,
B物体受到的拉力、电子秤的支持力与B的重力平衡,
所以B受到的支持力F支=GB﹣F拉=300N﹣80N=220N,
所以电子秤受到B物体对它的压力大小等于220N。
答:(1)水位上涨到A的上表面时,A受到的浮力为200N;
(2)变小,物体受到的浮力减小,C端绳子的拉力增大,根据杠杆的平衡条件可知当动力臂和阻力臂不变时;杠杆右侧对B的拉力增大,台秤示数减小;
(3)当A物体五分之二露出水面时,电子秤所受的压力220N。
34.如图是上肢力量健身器示意图。杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为90N。重力为500N的健身者通过细绳在B点施加400N竖直向下的拉力时,杠杆在水平位置平衡,配重对地面的压力恰好为零。(杠杆AB、绳重及摩擦均忽略不计)。
(1)健身过程中,配重被拉起时,健身器中的滑轮为 动滑轮 (选填“定滑轮”或“动滑轮”)。
(2)求配重对地面的压力恰好为零时A点受到的拉力。
(3)求滑轮的重力。
【解答】解:(1)健身过程中,人拉下杠杆的一端,滑轮随杠杆另一端一起上升,滑轮轴的位置变化,所以,此滑轮为动滑轮;
(2)因为AB=3BO,且AB=AO+OB,
所以,AO+OB=3BO,
AO=2OB,
根据杠杆的平衡条件得:FA×AO=FB×OB,
所以,FA==200N;
(3)据图可知,当配重对地面的压力恰好为零时,
连接配重的绳子上拉力:F=G=90N,
以滑轮为研究对象,力的关系满足:2F+G轮=FA,
所以,G轮=FA﹣2F=200N﹣2×90N=20N。
故答案为:(1)动滑轮;(2)配重对地面的压力恰好为零时A点受到的拉力为200N;(3)滑轮的重力为20N。
五.计算题(共2小题)
35.如图所示,将长为1.2米的轻质木棒(重力忽略不计)平放在水平方形台面上,左右两端点分别为A、B,它们距台面边缘处的距离均为0.3米。在A端挂一个重为30牛的物体,在B端挂一个重为G的物体。
(1)若G=30牛,台面收到木棒的压力为多少?
(2)若要使木棒右端下沉,B端挂的物体至少要大于多少?
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为多少?
【解答】解:(1)放在水平方形台面上轻质木棒受左右两物体的竖直向下的拉力和台面竖直向上的支持力,即F支持=F拉力=2G=2×30N=60N;
因为木板对台面的压力和台面对木棒的支持力是一道相互作用力,大小相等,即F压力=F支持=60N;
(2)此时L左=1.2m﹣0.3m=0.9m,L右=0.3m,
根据杠杆的平衡条件:GA×L左=GB×L右得。
B端挂的物体的重力:
GB===90N;
(3)若以右边缘为支点,右边力臂最小,力最大为90N;
若以左边缘为支点,右边力臂最大,力最小,此时L左′=0.3m,L右′=1.2m﹣0.3m=0.9m,
最小为:
F小===10N。
答:(1)若G=30牛,台面收到木棒的压力为60N;
(2)若要使木棒右端下沉,B端挂的物体至少要大于90N;
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为10N~90N。
36.为完成某水下工程,施工队要把一个圆柱体工件从水中提起。通过技术分析,采用质量为2吨、每个车轮与水平地面的接触面积为200cm2的四轮小型牵引车,通过牵引滑轮组匀速打捞起水中的圆柱体工件,小型牵引车始终保持2m/s不变的速度牵引,如图(a)所示。在打捞的过程中,小型牵引车的拉力功率P随打捞时间t的变化如图(b)所示。已知动滑轮重为200N,不计绳子与滑轮间的摩擦,g取10N/kg,试计算:
(1)在打捞的过程,小型牵引车对水平地面施加的压强是多少?
(2)在圆柱体工件没有露出水面前,所受到的浮力是多少?
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,滑轮组的机械效率是多少?
【解答】解:(1)货车空载时对水平地面的压力:
F=G车=m车g=2×103kg×10N/kg=2×104N;
受力面积S=200cm2×4=800cm2=0.08m2;
货车空载时对水平地面的压强:
p===2.5×105Pa;
(2)由图乙知,在圆柱体工件没有露出水面前,牵引功率P1=1400W,
由P===Fv得:
此时达到绳子的牵引拉力F1===700N,
由图知,滑轮组由3段绳子承担物重,由于使用滑轮组时不计绳子与滑轮间的摩擦,
拉力F=(G+G动),
所以,在圆柱体工件没有露出水面前,滑轮组对物体的提力:
G′=3F1﹣G动=3×700N﹣200N=1900N;
当圆柱体工件被拉出水面后在空中匀速上升的过程中,牵引功率P1=1600W,由P=Fv得:
此时达到绳子的牵引拉力F2===800N,
由拉力F=(G+G动)得:
物体重力G=3F2﹣G动=3×800N﹣200N=2200N;
所以,在圆柱体工件没有露出水面前,所受浮力为F浮=G﹣G′=2200N﹣1900N=300N;
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,由于使用滑轮组时不计绳子与滑轮间的摩擦,
则η===,
所以,滑轮组的机械效率:
η=×100%=×100%≈92%。
答:(1)在打捞的过程,小型牵引车对水平地面施加的压强是2.5×105Pa;
(2)在圆柱体工件没有露出水面前,所受到的浮力是300N;
(3)当圆柱体工件被拉出水面后在空 中匀速上升的过程中,滑轮组的机械效率是92%。
(3)11.1%。
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)
九上 第二章 酸和碱
一.选择题(共20小题)
1.人踮脚时脚掌可以看作一个杠杆,下列能正确表示踮脚时该杠杆的支点、动力和阻力的示意图是( )
A. B.
C. D.
2.在“探究杠杆的平衡条件”的实验中,所用杠杆质量分布均匀,钩码质量相同,下列说法正确的是( )
A.甲图中杠杆若右端低,则右端螺母应该向右调节
B.从乙图杠杆平衡状态到丙图,拉力F的力臂变大
C.从乙图杠杆平衡状态到丙图,弹簧秤示数不变
D.丙图中改为沿虚线方向拉,弹簧秤示数不变
3.如图中的皮划艇运动员一手支撑住桨柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B.
C. D.
4.如图所示,O为杠杆的支点,A点悬挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
5.我国古代《墨经》最早记述了秤的杠杆原理(如图所示),此时杠杆处于平衡状态(忽略杆的质量),有关它的说法正确的是( )
A.杠杆在图示的位置平衡时,“权”的质量小于“重”的质量
B.“权”和“重”增加相同的质量,A端会上扬
C.增大“重”时,应把“权”向B端适当移动
D.若将提纽O向B端移动一些,杆秤的测量范围将变小
6.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力,欲使其一端抬离地面。则( )
A.F甲>F乙,因为乙方法的动力臂长
B.F甲<F乙,因为甲方法的阻力臂短
C.F甲>F乙,因为甲方法的动力臂短
D.F甲=F乙,因为动力臂都是阻力臂的2倍
7.如图所示,轻质杠杆AB可绕O点自由转动。当杠杆A端的甲物块悬空;B端的乙球浸没在水中时(不碰容器底和壁),杠杆恰好水平平衡,A、B两端的细线均不可伸长且处于张紧状态。已知OA:OB=1:2,甲物块重400N,乙球体积为1×10﹣2m3,g取10N/kg。下列说法中正确的是( )
A.乙球受到的浮力为10N
B.杠杆B端所受的拉力为100N
C.乙球的重力为300N
D.乙球的密度为2×103kg/m3
8.如图,OAB是杠杆,OA与杆AB垂直,在OA的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力可能为10N
D.作用点在B点的最小动力小于10N
9.一根轻质杠杆可绕O点转动,在杠杆的中点挂一重物G,在杆的另一端施加一个方向始终保持水平的力F,如图。力F使杆从所示位置慢慢抬起的过程中,力F和它的力臂LF、重力G和它的力臂LG的变化情况( )
A.F增大,LF减小 B.F减小,LF增大
C.G不变,LG减小 D.G不变,LG不变
10.如图是一款可以调节锅内温度大小的高压锅保险阀门原理图,其本质是一根以O为支点的杠杆。当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,若需要减小锅内的最高温度,则需要( )
A.增大重物质量,并将重物向左移动
B.增大重物质量,并将重物向右移动
C.减小重物质量,并将重物向左移动
D.减小重物质量,并将重物向右移动
11.如图所示,在水平拉力F的作用下重100N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10N,则拉力F的大小为( )N,物体A与水平桌面的摩擦力大小( )N。
A.200N;10N B.200N;20N C.20N;10N D.20N;20N
12.某同学模拟建筑工地上拉动工件的情景,设置了如图所示的滑轮组,每个滑轮重10牛。并用该滑轮组将一个重为100牛的物体沿水平面匀速拉动2米,物体移动时受到地面对物体的摩擦力为35牛。不计绳重和机械摩擦,人对绳端的拉力为( )
A.22.5牛 B.50牛 C.55牛 D.60牛
13.如图所示,用三种不同的方式分别拉同一物体在水平地面上做匀速直线运动,所用拉力分别为F1、F2和F3,则它们的大小关系正确的是( )(不计滑轮重和绳子与滑轮之间的摩擦)
A.F3<F1<F2 B.F1<F2<F3 C.F2<F1<F3 D.F3<F2<F1
14.如图所示,用三种方法拉动同一物体以相等速度v匀速上升相同的高度h。拉力F1、F2、F3的功率分别是P1、P2、P3,绳子自由端移动的速度分别为v1、v2、v3。不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。则下列判定正确的是( )
A.F1<F2<F3 B.v1>v2>v3 C.P1>P2>P3 D.P1=P2=P3
15.如图所示装置中,若拉力F=4N,则甲、乙两弹簧的读数分别为( )
A.8N,8N B.12N,8N C.8N,12N D.12N,12N
16.如图所示,湖水中有两艘小船,绳子的一端拴在甲船上,乙船上固定着滑轮,绳子绕过滑轮,站在甲船上的人用100N的力拉绳子的自由端。如果在20s内甲船向右匀速移动了10m,同时乙船向左匀速移动了4m,则人对绳子的力做功的功率是( )
A.50W B.140W C.30W D.70W
17.如图所示,竖直固定的测力计下端挂一个滑轮组,滑轮组下端挂有物体B,滑轮组绳的末端通过定滑轮沿水平方向与物体A相连。此时物体A在绳的水平拉力作用下向左做匀速直线运动,此时测力计的示数为450N;在物体B下加挂重为60N的物体C后,用水平向右的力F拉动物体A可使其沿水平桌面向右做匀速直线运动,此时物体B上升的速度大小为5cm/s.已知每个滑轮重均为50N,若不计绳重及滑轮的摩擦,g取10N/kg,则下列说法中正确的是( )
A.物体A所受滑动摩擦力大小为100N
B.水平向右的力F的大小为400N
C.物体B所受重力为400N
D.拉力F做功的功率为63W
18.如图所示,用40N的力F沿水平方向拉滑轮,可使重20N的物体A以0.3m/s的速度在水平面上匀速运动:物体B重10N,弹簧测力计的示数恒为10N(不计滑轮、测力计、绳子的重量,滑轮的转轴光滑)。下列说法不正确的是( )
A.物体A受到地面的摩擦力是10N
B.滑轮移动的速度是0.15m/s
C.水平拉力F的功率是6W
D.在2s内绳子对物体A做的功为6J
19.图中a、b、c为三个物块,M、N为两个轻质弹簧,R为跨过光滑定滑轮的轻绳,它们连接如图并处于平衡状态。则以下说法正确的个数是( )
①有可能N处于拉伸状态而M处于压缩状态
②有可能N处于压缩状态而M处于拉伸状态
③有可能N处于不伸不缩状态而M处于拉伸状态
④有可能N处于拉伸状态而M处于不伸不缩状态。
A.一个 B.二个 C.三个 D.四个
20.如图甲所示的滑轮组装置,不计绳重和摩擦,绳对滑轮的拉力方向均为竖直方向。用该滑轮组提升放置在水平地面上重为G=80N的重物到高处。用竖直向下的拉力拉绳的自由端,拉力F随时间t变化的图像如图乙所示,重物上升的速度v随时间t变化的图像如图丙所示。已知在2s 4s内重物上升的竖直高度为2m,则下列说法错误的是( )
A.动滑轮重为20N
B.0 2s内重物对地面的压力为40N
C.2 4s内,绳自由端下降的平均速度为2m/s
D.4 6s内,拉力F的功率为100W
二.填空题(共7小题)
21.用好科学知识有利于轻松出行。如图为小科使用的拉杆旅行箱,装有物品的旅行箱整体可视为杠杆,O为支点,B为重心,A为拉杆的端点,在A点沿图示方向施加拉力F使旅行箱保持静止。
(1)其他条件不变时,仅缩短拉杆的长度,拉力F会 (选填“增大”“不变”或“缩小”)。
(2)生活中常把箱内物体整体的重心以 (选填“B→B'”或“B'→B”)转移,在其他条件不变时,拉力F会减小。
22.小乐用竖直向上的拉力F拉着一个重为200N的行李箱,行李箱保持静止。如图所示为此时行李箱所受拉力F和重力G的示意图,其中O为滚轮的转轴(不计此处摩擦),OA=10cm,AB=30cm,则拉力F的大小为 N。若小乐沿MN箭头方向施加拉力,行李箱能否继续保持静止?判断并说明理由。 。
23.如图为“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=2OB,G1=10牛,杠杆自身重力和摩擦不计,固定装置未画出。
(1)当杠杆处于甲图所示水平位置平衡时,G2的重力为 牛;
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(OB'=OB),保持G1位置不变,要使杠杆在图乙位置保持平衡,则G2的悬挂点应该移动至 点处(选填“①”、“②”或“③”)。若不移动,则A端将 (选填“上升”或“下降”)。
24.如图所示,F1=8N,F2=6N,此时物体A相对于地面静山,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。
(1)弹簧测力计读数为 N。
(2)物体A和地面之间的摩擦力 N。
(3)如果增大F2,物体A是否有可能向左运动?请说明理由 。
25.图甲是脚踏式翻盖垃圾桶的实物图,通过两个水平杠杆组合实现脚踏翻盖,图乙为这两个杠杆AO1B和DCO2的示意图。已知桶盖重5N,重心位于DC中点的正上方,AO1=30cm,O1B=20cm,桶盖和连接杆的尺寸如图乙所示,脚踏杆AO1B和竖直连接杆BC的质量不计。
(1)杠杆DCO2阻力臂长度为 ;
(2)若要把桶盖翻开,脚对踏板A处的压力至少为 。
26.如图所示,物体A重为200N,C、D滑轮重均为30N。物体B重为120N,它恰好能拉着A向右匀速运动,不计滑轮与绳子间摩擦。
(1)图中D为 (填“定”或“动”)滑轮。
(2)现用水平向左的拉力F作用于物体A上,使物体B匀速上升,则拉力F的大小为 N。
27.如图所示,每个滑轮重20牛,质量为60kg的人,站在质量为30kg的吊篮内,人至少用 N的拉力拉住绳子,才能使自己和吊篮在空中保持静止。(不计绳重及摩擦)
三.实验探究题(共2小题)
28.如图所示是一个自制密度秤,其外形和杆秤差不多。其左端A点挂一个质量为0.2kg、体积为25cm3的铁块。提纽位于O处,秤砣放在B处时,秤杆恰好水平平衡。已知秤砣的质量为0.1kg,AO=5cm,BO=10cm。把铁块浸没在待测密度的液体中时,移动秤砣便可直接在杆上读出液体的密度。
(1)密度秤零刻度在O点右侧 cm处。
(2)现将铁块浸没在待测液体中,秤砣左移1.5cm到C点时,杠杆在水平位置重新平衡,则待测液体的密度为 kg/m3。
(3)关于该密度秤的刻度特点下列判断正确的有哪些 。
A.该密度秤的刻度不均匀
B.该密度秤的刻度左大右小
C.秤砣质量变小密度秤的精度变高
D.秤砣质量变大密度秤的量程变大
29.小江在做“研究杠杆平衡条件”的实验中,进行了如下一系列操作:
a.把杠杆的中点支在支架上。
b.把钩码挂在杠杆的两边,改变钩码的位置使杠杆在水平位置平衡。
c.求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值。
d.改变力和力臂的数值,做三次实验;
e.记下两边钩码的重,用尺量出它们的力臂,记下实验数据;
f.调节平衡螺母,使杠杆在水平位置平衡。
(1)请你补充完整正确的实验操作顺序:a﹣f﹣ ﹣c。
(2)实验中所用钩码的质量均相等,如图甲所示,杠杆在水平位置平衡;若再给两边各挂上一个钩码,则杠杆将 (填“仍平衡”“左端下沉”或“右端下沉”)。
(3)实验中保持钩码个数和位置不变,弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,如图乙所示,则下列能描述测力计示数F与θ关系的图像是 。
四.解答题(共5小题)
30.如图所示,杆OA长为0.5米,O端用铰链铰于竖直墙面,杆中B处有一制动闸,OB为0.2米,闸厚d为0.04米,轮子C的半径R为0.2米,闸与轮间动摩擦因数μ为0.5.飞轮顺时针转动时,要对轮施加力矩(力×力臂)1000牛米才能使轮减速而制动,若杆与闸的重力不计,则在杆的A端需加垂直于杆的力F的大小为 牛。
31.如图所示,在住宅中通常用固定在墙上的三角支架ABC放置空调外机。如果A处固定的螺钉脱落,则支架会倾翻造成空调外机坠落事件。已知AB长80cm,AC长50cm,室外机的重力为500N,重力作用线正好经过AB中点。
(1)在图中画出三角支架A处所受的水平作用力F的示意图及其力臂。
(2)计算三角支架A处所受的水平作用力F的大小(支架重力不计)。
(3)为了避免A处螺钉受力太大而脱落,导致支架倾翻空调外机坠落,安装师傅会将室外机向 (填“A”或“B”) 靠近一些,理由是 。
32.为深入探究平衡木的平衡,小萍设计了如图装置。轻质杠杆AOB可绕支点O无摩擦转动,且AB=3m,OA=1m。在杠杆A端用不可伸长的细线悬挂正方体M,重力为1000N,边长为50cm。当重为500N的小萍静止站立在OB之间某处时,杠杆处于水平平衡状态。
(1)正方体M的密度;
(2)如图所示,小萍站立在距离B端1.5m处时,正方体M对水平地面的压强;
(3)若细线能承受的最大拉力为800N,小萍由O点向B以10cm/s的速度缓慢匀速行走,求小萍能安全行走的时间。
33.如图是同学们利用实验室器材,组合成的监控水库水位的模拟装置,整个装置是由长方体A和B、滑轮组、轻质杠杆CD、台秤等组成。杠杆始终在水平位置平衡。
已知OC:OD=1:2,A的高度为50cm,底面积400cm2,重为550N,动滑轮重50N,B重300N,不计绳重与摩擦。求:
(1)水位上涨到A的上表面时,A受到的浮力;
(2)在台秤的刻度盘上刻上反映水位的刻度,当水位下降时,台秤示数会 ,请说明理由 ;
(3)当柱体A有五分之二高度露出水面时,台秤处显示的压力为多大?
34.如图是上肢力量健身器示意图。杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为90N。重力为500N的健身者通过细绳在B点施加400N竖直向下的拉力时,杠杆在水平位置平衡,配重对地面的压力恰好为零。(杠杆AB、绳重及摩擦均忽略不计)。
(1)健身过程中,配重被拉起时,健身器中的滑轮为 (选填“定滑轮”或“动滑轮”)。
(2)求配重对地面的压力恰好为零时A点受到的拉力。
(3)求滑轮的重力。
五.计算题(共2小题)
35.如图所示,将长为1.2米的轻质木棒(重力忽略不计)平放在水平方形台面上,左右两端点分别为A、B,它们距台面边缘处的距离均为0.3米。在A端挂一个重为30牛的物体,在B端挂一个重为G的物体。
(1)若G=30牛,台面收到木棒的压力为多少?
(2)若要使木棒右端下沉,B端挂的物体至少要大于多少?
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为多少?
36.为完成某水下工程,施工队要把一个圆柱体工件从水中提起。通过技术分析,采用质量为2吨、每个车轮与水平地面的接触面积为200cm2的四轮小型牵引车,通过牵引滑轮组匀速打捞起水中的圆柱体工件,小型牵引车始终保持2m/s不变的速度牵引,如图(a)所示。在打捞的过程中,小型牵引车的拉力功率P随打捞时间t的变化如图(b)所示。已知动滑轮重为200N,不计绳子与滑轮间的摩擦,g取10N/kg,试计算:
(1)在打捞的过程,小型牵引车对水平地面施加的压强是多少?
(2)在圆柱体工件没有露出水面前,所受到的浮力是多少?
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,滑轮组的机械效率是多少?
参考答案与试题解析
一.选择题(共20小题)
1.人踮脚时脚掌可以看作一个杠杆,下列能正确表示踮脚时该杠杆的支点、动力和阻力的示意图是( )
A. B.
C. D.
【解答】解:踮起脚时,脚尖O为支点,人的重力落在脚掌中为阻力,脚干对脚跟的拉力为动力,动力臂大于阻力臂,是一个省力杠杆;如A。
故选:A。
2.在“探究杠杆的平衡条件”的实验中,所用杠杆质量分布均匀,钩码质量相同,下列说法正确的是( )
A.甲图中杠杆若右端低,则右端螺母应该向右调节
B.从乙图杠杆平衡状态到丙图,拉力F的力臂变大
C.从乙图杠杆平衡状态到丙图,弹簧秤示数不变
D.丙图中改为沿虚线方向拉,弹簧秤示数不变
【解答】解:A、实验前没有挂钩码和弹簧测力计时,发现杠杆左端高右端低,说明杠杆的重心在支点右侧,要使其在水平位置平衡,应将杠杆左端的平衡螺母向左调节,故A错误;
B、C、做实验时杠杆已达到平衡,当杠杆由图乙的位置变成图丙的位置时,拉力F的力臂变小,其动力臂、阻力臂的比值是不变的,所以在阻力不变的情况下,根据杠杆平衡条件F1L1=F2L2分析可知动力是不变的,故B错误,C正确;
D、丙图中改为沿虚线方向拉时,阻力及阻力臂不变,拉力力臂变大,根据杠杆平衡条件可知拉力变小,故D错误。
故选:C。
3.如图中的皮划艇运动员一手支撑住桨柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B.
C. D.
【解答】解:由题意可知,撑住桨柄的末端为支点,下面的手给浆向后的力,这时水给浆一个向前的力,所以船前进。
故选:B。
4.如图所示,O为杠杆的支点,A点悬挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
【解答】解:由图可知,O为支点,A点挂一重物,阻力方向向下,为使杠杆在水平位置平衡,在B点施加一个力,则动力F与杠杆垂直且方向向下,
要使该力最小,由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;
由图可知,BQ对应的动力臂最长,所以该力应沿BQ方向。
故选:D。
5.我国古代《墨经》最早记述了秤的杠杆原理(如图所示),此时杠杆处于平衡状态(忽略杆的质量),有关它的说法正确的是( )
A.杠杆在图示的位置平衡时,“权”的质量小于“重”的质量
B.“权”和“重”增加相同的质量,A端会上扬
C.增大“重”时,应把“权”向B端适当移动
D.若将提纽O向B端移动一些,杆秤的测量范围将变小
【解答】解:A、杠杆在图示的位置平衡时,根据杠杆平衡条件可得“权”ד标”=“重”ד本”,由图可知“标”大于“本”,则“权”的质量小于“重”的质量,故A正确;
B、设增加的质量为Δm,由图可知,杠杆平衡时“标”大于“本”,则Δmד标”>Δmד本”即“权+Δm”ד标”>“重+Δm”ד本”,A端会下沉,故B错误;
C、在“权”不变时,“重”增大,需要“标”增大,即把“权”向A端适当移动,故C错误;
D、将提纽O向B端移动一些,“标”增大,则“权”和“标”的乘积增大,而“本”变小,由杠杆平衡可知“重”增大,即杆秤测量范围增大,故D错误。
故选:A。
6.如图,一块厚度、密度均匀的长方形水泥板放在水平地面上,用一竖直向上的力,欲使其一端抬离地面。则( )
A.F甲>F乙,因为乙方法的动力臂长
B.F甲<F乙,因为甲方法的阻力臂短
C.F甲>F乙,因为甲方法的动力臂短
D.F甲=F乙,因为动力臂都是阻力臂的2倍
【解答】解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力为F,阻力均为水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以动力臂都等于阻力臂的2倍;
根据杠杆的平衡条件可得:F==G,所以前后两次所用的力相同,故ABC错误,D正确。
故选:D。
7.如图所示,轻质杠杆AB可绕O点自由转动。当杠杆A端的甲物块悬空;B端的乙球浸没在水中时(不碰容器底和壁),杠杆恰好水平平衡,A、B两端的细线均不可伸长且处于张紧状态。已知OA:OB=1:2,甲物块重400N,乙球体积为1×10﹣2m3,g取10N/kg。下列说法中正确的是( )
A.乙球受到的浮力为10N
B.杠杆B端所受的拉力为100N
C.乙球的重力为300N
D.乙球的密度为2×103kg/m3
【解答】解:A、根据阿基米德原理,乙球浸没在水中受到的浮力:F浮=ρ水gV排=1×103kg/m3×10N/kg×10﹣2m3=100N,故A错误;
B、杠杆B端所受的拉力为F′,杠杆恰好水平平衡。根据杠杆的平衡条件:G甲×OA=F′×OB;即F′===200N,故B错误;
C、杠杆B端所受的拉力为F′,根据物体间力的作用是相互的,则乙球受到杠杆B端的拉力大小也为F′,乙球浸没在水中时处于平衡状态,G乙=F′+F浮=200N+100N=300N,故C正确;
D、由C我们知道G乙=300N,根据密度的公式:ρ乙====3×103kg/m3,故D错误。
故选:C。
8.如图,OAB是杠杆,OA与杆AB垂直,在OA的中点挂一个20N的重物,加在B点的动力使OA在水平位置保持静止(杠杆重力及摩擦均不计),则( )
A.该杠杆一定是省力杠杆
B.该杠杆一定是费力杠杆
C.作用点在B点的最小动力可能为10N
D.作用点在B点的最小动力小于10N
【解答】解:AB、由图知,使用该杠杆时阻力为重物对杠杆的拉力,其大小其等于物重G,阻力臂(图中支点O到阻力作用点的距离)是确定的,但只知道动力的作用点在B点,不知道动力作用的方向,所以也就不知道动力臂的大小,则无法比较动力臂和阻力臂的大小关系,无法确定它属于哪种类型的杠杆,故AB错误;
CD、由图知,当加在B点的动力F垂直于OB向上时,支点与动力作用点之间的连线OB就是最长的动力臂,此时动力最小;因为C点是OA的中点,所以结合数学知识可知OB>OA=2OC;
根据杠杆的平衡条件可得F×OB=G×OC,
则作用点在B点的最小动力:F==G=×20N=10N,故C错误,D正确。
故选:D。
9.一根轻质杠杆可绕O点转动,在杠杆的中点挂一重物G,在杆的另一端施加一个方向始终保持水平的力F,如图。力F使杆从所示位置慢慢抬起的过程中,力F和它的力臂LF、重力G和它的力臂LG的变化情况( )
A.F增大,LF减小 B.F减小,LF增大
C.G不变,LG减小 D.G不变,LG不变
【解答】解:根据力臂的概念做出力F和重力G的力臂,如图所示:
使杠杆从图中所示位置慢慢抬起的过程中,重物的重力不变但力臂LG变大,F的力臂LF变小;
根据杠杆平衡条件F LF=G LG可得:F=,则F一直在增大,故A正确,BCD错误。
故选:A。
10.如图是一款可以调节锅内温度大小的高压锅保险阀门原理图,其本质是一根以O为支点的杠杆。当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,若需要减小锅内的最高温度,则需要( )
A.增大重物质量,并将重物向左移动
B.增大重物质量,并将重物向右移动
C.减小重物质量,并将重物向左移动
D.减小重物质量,并将重物向右移动
【解答】解:当温度升高到一定程度时,蒸汽从阀门向上喷出,在A点对杠杆施加向上的力,重物阻碍杠杆向上移动,若需要减小锅内的最高温度,则阻力、阻力臂需要减小,故减小重物质量,并将重物向左移动。
故选:C。
11.如图所示,在水平拉力F的作用下重100N的物体A,沿水平桌面做匀速直线运动,弹簧秤B的示数为10N,则拉力F的大小为( )N,物体A与水平桌面的摩擦力大小( )N。
A.200N;10N B.200N;20N C.20N;10N D.20N;20N
【解答】解:如图所示,弹簧测力计B测出了动滑轮上的绳子上的拉力为10N;则物体A受到拉力为10N;又因物体A做匀速直线运动,则物体A与水平桌面的摩擦力与物体A受到拉力是一对平衡力,则摩擦力大小也是10N;
拉力F=2f=2×10N=20N。
故选:C。
12.某同学模拟建筑工地上拉动工件的情景,设置了如图所示的滑轮组,每个滑轮重10牛。并用该滑轮组将一个重为100牛的物体沿水平面匀速拉动2米,物体移动时受到地面对物体的摩擦力为35牛。不计绳重和机械摩擦,人对绳端的拉力为( )
A.22.5牛 B.50牛 C.55牛 D.60牛
【解答】解:由图知,n=2,不计绳重和机械摩擦,
F=(G动+f)=×(10N+35N)=22.5N。
故选:A。
13.如图所示,用三种不同的方式分别拉同一物体在水平地面上做匀速直线运动,所用拉力分别为F1、F2和F3,则它们的大小关系正确的是( )(不计滑轮重和绳子与滑轮之间的摩擦)
A.F3<F1<F2 B.F1<F2<F3 C.F2<F1<F3 D.F3<F2<F1
【解答】解:不计滑轮重和绳子与滑轮之间的摩擦:
假设物块与地面的摩擦力为f,
左滑轮为定滑轮,F1处于绳端,所以F1=f;
中滑轮为动滑轮,F2处于绳端,则F2=f;
右滑轮为动滑轮,滑轮、物体匀速运动,滑轮受到向左的力2f等于向右的拉力F3,即F3=2f;
故F2<F1<F3。
故选:C。
14.如图所示,用三种方法拉动同一物体以相等速度v匀速上升相同的高度h。拉力F1、F2、F3的功率分别是P1、P2、P3,绳子自由端移动的速度分别为v1、v2、v3。不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。则下列判定正确的是( )
A.F1<F2<F3 B.v1>v2>v3 C.P1>P2>P3 D.P1=P2=P3
【解答】解:由题意可知,用三种方法拉动同一物体以相等速度v匀速上升相同高度h,不计滑轮与线及滑轮与转轴之间的摩擦,不计滑轮、绳的重量。
甲图:滑轮为动滑轮,动滑轮能省一半的力,则此时拉力F1=G;但是多费1倍的距离,则拉力作用点移动的速度v1=2v;
乙图:滑轮为动滑轮,但拉力的作用点在动滑轮的轴上,因此是一个费力杠杆,多费1倍的力,省一半的距离,因此F2=2G,拉力作用点移动的速度v2=v;
丙图:滑轮为定滑轮,定滑轮不能省力,且不计滑轮重及摩擦,则此时拉力F3=G;拉力作用点移动的速度v3=v;
由以上分析可知:F1<F3<F2,v1>v3>v2;
根据P===Fv可知,拉力的功率分别为:
P1=F1v1=G×2v=Gv,
P2=F2v2=2G×v=Gv,
P3=F3v3=G×v=Gv,
所以拉力F1、F2、F3的功率P1=P2=P3,故ABC错误,D正确。
故选:D。
15.如图所示装置中,若拉力F=4N,则甲、乙两弹簧的读数分别为( )
A.8N,8N B.12N,8N C.8N,12N D.12N,12N
【解答】解:由图知,滑轮组承担左边拉力的绳子股数n=3,不计滑轮、弹簧秤及轻绳的质量,拉力F=F左,
滑轮组受到水平向左的拉力F左=3F=3×4N=12N,根据力的相互作用性可知,甲弹簧秤的读数为12N;
滑轮组承担右边拉力的绳子股数n=2,不计滑轮、弹簧秤及轻绳的质量,拉力F=F右,
滑轮组受到水平向右的拉力F右=2F=2×4N=8N,根据力的相互作用性可知,乙弹簧秤的读数为8N。
故选:B。
16.如图所示,湖水中有两艘小船,绳子的一端拴在甲船上,乙船上固定着滑轮,绳子绕过滑轮,站在甲船上的人用100N的力拉绳子的自由端。如果在20s内甲船向右匀速移动了10m,同时乙船向左匀速移动了4m,则人对绳子的力做功的功率是( )
A.50W B.140W C.30W D.70W
【解答】解:甲船向右移动了10m,乙船向左移动了4m,以甲为参照物乙向左移动了10m+4m=14m,有两段绳子拉乙船,故绳子自由端总共移动s=14m×2=28m;
故人拉绳子的功率P====140W。
故选:B。
17.如图所示,竖直固定的测力计下端挂一个滑轮组,滑轮组下端挂有物体B,滑轮组绳的末端通过定滑轮沿水平方向与物体A相连。此时物体A在绳的水平拉力作用下向左做匀速直线运动,此时测力计的示数为450N;在物体B下加挂重为60N的物体C后,用水平向右的力F拉动物体A可使其沿水平桌面向右做匀速直线运动,此时物体B上升的速度大小为5cm/s.已知每个滑轮重均为50N,若不计绳重及滑轮的摩擦,g取10N/kg,则下列说法中正确的是( )
A.物体A所受滑动摩擦力大小为100N
B.水平向右的力F的大小为400N
C.物体B所受重力为400N
D.拉力F做功的功率为63W
【解答】解:由题意得:450N=50N+(50N+GB)
即B的重力:GB=550N;
则A物体所受摩擦力为×(50N+550N)=200N;
水平向右的力:F=×(50N+60N+550N)+200N=420N;
因为B上升的速度为0.05m/s,所以A的速度为3×0.05m/s=0.15m/s,
P=Fv=420×0.15=63W。
故选:D。
18.如图所示,用40N的力F沿水平方向拉滑轮,可使重20N的物体A以0.3m/s的速度在水平面上匀速运动:物体B重10N,弹簧测力计的示数恒为10N(不计滑轮、测力计、绳子的重量,滑轮的转轴光滑)。下列说法不正确的是( )
A.物体A受到地面的摩擦力是10N
B.滑轮移动的速度是0.15m/s
C.水平拉力F的功率是6W
D.在2s内绳子对物体A做的功为6J
【解答】解:
A、不计滑轮的摩擦和重力,以动滑轮为研究对象,则两段绳子向右的拉力与向左的拉力平衡,所以2F拉=F,则A物体对滑轮的拉力F拉=F=×40N=20N;力的作用是相互的,所以滑轮对A的拉力也为20N;
弹簧测力计的示数恒为10N,因拉滑轮时,物体B始终处于静止状态,则测力计对B向右的拉力与A对B向左的摩擦力平衡,所以fA对B=F示=10N;力的作用是相互的,所以,物体B对A的摩擦力为10N,方向向右;
物体A向左匀速运动,同时地面对物体A还有向右的摩擦力,由力的平衡条件可得:F拉=fB对A+f地,
f地=F拉﹣fB对A=20N﹣10N=10N,物体A受到地面的摩擦力是10N,故A正确;
B、A移动的速度即绳端移动的速度为0.3m/s,所以滑轮的移动速度为×0.3m/s=0.15m/s,故B正确;
C、水平拉力F的功率为:P===Fv=40N×0.15m/s=6W,故C正确;
D、绳子对物体A的拉力是20N,2s物体A移动的距离为sA=vAt=0.3m/s×2s=0.6m,
所以在2s内绳子对物体A做的功:W=F拉sA=20N×0.6m=12J,故D错误。
故选:D。
19.图中a、b、c为三个物块,M、N为两个轻质弹簧,R为跨过光滑定滑轮的轻绳,它们连接如图并处于平衡状态。则以下说法正确的个数是( )
①有可能N处于拉伸状态而M处于压缩状态
②有可能N处于压缩状态而M处于拉伸状态
③有可能N处于不伸不缩状态而M处于拉伸状态
④有可能N处于拉伸状态而M处于不伸不缩状态。
A.一个 B.二个 C.三个 D.四个
【解答】解:(1)对于弹簧N,因上端与绳子连接,因为绳子只能承受拉力而不能承受压力,故弹簧N可能处于拉伸或原长,不可能处于压缩状态,故②错误;
(2)以a为研究对象,若N处于拉伸状态,则a受绳子向上的拉力,M可能拉伸、可能压缩也可能处于原长,故①④正确;
(3)若N处于原长,则绳子对a无拉力,则M一定处于压缩状态,故③错误。
因此正确的说法有①④,正确的说法有两个。
故选:B。
20.如图甲所示的滑轮组装置,不计绳重和摩擦,绳对滑轮的拉力方向均为竖直方向。用该滑轮组提升放置在水平地面上重为G=80N的重物到高处。用竖直向下的拉力拉绳的自由端,拉力F随时间t变化的图像如图乙所示,重物上升的速度v随时间t变化的图像如图丙所示。已知在2s 4s内重物上升的竖直高度为2m,则下列说法错误的是( )
A.动滑轮重为20N
B.0 2s内重物对地面的压力为40N
C.2 4s内,绳自由端下降的平均速度为2m/s
D.4 6s内,拉力F的功率为100W
【解答】解:A、由图甲可知,连接动滑轮绳子的股数n=2,由丙图可知,物体在4s~6s内做匀速直线运动,由图乙可知此时的拉力FF3=50N,
不计绳重和摩擦,则由F=(G+G动)得,动滑轮的重力:
G动=nF3﹣G物=2×50N﹣80N=20N;故A正确;
B、在0~2s内,物体的运动速度为零,即物体静止在地面上,
由图乙可知此时的拉力F1=30N,
把动滑轮和重物看成整体,则这个整体受到向下的总重力、向上的支持力以及2股绳子向上的拉力而处于静止状态,
由力的平衡条件得:
F支+2F1=G物+G动,
则地面对物体的支持力:
F支=G物+G动﹣2F1=80N+20N﹣2×30N=40N,
根据力的作用是相互的可知,此过程中重物对地面的压力:
F压=F支=40N;故B正确;
C、已知在2s~4s内重物上升的竖直高度为2m,
则绳子自由端移动的距离:
s=nh=2×2m=4m,
所用的时间:
t=4s﹣2s=2s,
则在2s~4s内,绳自由端下降的平均速度vB===2m/s,故C正确;
D、由图丙可知,在4s~6s内,重物做匀速直线运动,其速度v=nv3=2×2.0m/s=4.0m/s,
拉力做功的功率:P===Fv=50N×4.0m/s=200W,故D错误。
故选:D。
二.填空题(共7小题)
21.用好科学知识有利于轻松出行。如图为小科使用的拉杆旅行箱,装有物品的旅行箱整体可视为杠杆,O为支点,B为重心,A为拉杆的端点,在A点沿图示方向施加拉力F使旅行箱保持静止。
(1)其他条件不变时,仅缩短拉杆的长度,拉力F会 增大 (选填“增大”“不变”或“缩小”)。
(2)生活中常把箱内物体整体的重心以 B→B' (选填“B→B'”或“B'→B”)转移,在其他条件不变时,拉力F会减小。
【解答】解:(1)其他条件不变时,仅缩短拉杆的长度,根据图中知,动力臂会减小,在阻力和阻力臂不变,动力臂越小,拉力F会增大;
(2)根据动力臂和阻力不变,阻力臂越小,动力越小知,生活中常把箱内物体整体的重心以B→B'转移,使得重力的力臂减小,在其他条件不变时,拉力F会减小。
故答案为:(1)增大;(2)B→B'。
22.小乐用竖直向上的拉力F拉着一个重为200N的行李箱,行李箱保持静止。如图所示为此时行李箱所受拉力F和重力G的示意图,其中O为滚轮的转轴(不计此处摩擦),OA=10cm,AB=30cm,则拉力F的大小为 50 N。若小乐沿MN箭头方向施加拉力,行李箱能否继续保持静止?判断并说明理由。 不能;拉力和重力都是使得箱子顺时针转动,箱子无法保持静止。 。
【解答】解:可以将行李箱看成是一个杠杆,支点为O,F为动力,箱子的重力为阻力,动力臂等于OB=OA+AB=10cm+30cm=40cm,阻力臂为OA=10cm;
由杠杆的平衡条件可得:F1LB=GLA,
则:F1===50N;
若小乐沿MN箭头方向施加拉力,行李箱重力使得箱子顺时针转动,此时的拉力也使得箱子顺时针转动,没有阻碍箱子转动的力,因而不能保持静止。
故答案为:50;不能;拉力和重力都是使得箱子顺时针转动,箱子无法保持静止。
23.如图为“杠杆力臂演示仪”,杠杆AOB可绕O点(螺母)转动,OA=2OB,G1=10牛,杠杆自身重力和摩擦不计,固定装置未画出。
(1)当杠杆处于甲图所示水平位置平衡时,G2的重力为 20 牛;
(2)松开螺母保持OA不动,使OB向下折一个角度后,再拧紧螺母形成一根可绕O点转动的杠杆AOB'(OB'=OB),保持G1位置不变,要使杠杆在图乙位置保持平衡,则G2的悬挂点应该移动至 ② 点处(选填“①”、“②”或“③”)。若不移动,则A端将 下降 (选填“上升”或“下降”)。
【解答】解:
(1)如图甲,杠杆在水平位置平衡,
由杠杆平衡条件得:G1×OA=G2×OB,
即:10N×0.2m=G2×0.1m,
解得:G2=20N;
(2)保持G1位置不变,即左边的力和力臂不变;G2不变,要使杠杆在图乙位置保持平衡,应该使右边的力臂不变;原来G2的力臂为OB,所以G2应该移动到②点处;
若不移动,杠杆左侧力与力臂的乘积大于右侧的力与力臂的乘积,此时杠杆A端下降。
故答案为:(1)20;(2)②,;下降。
24.如图所示,F1=8N,F2=6N,此时物体A相对于地面静山,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。
(1)弹簧测力计读数为 18 N。
(2)物体A和地面之间的摩擦力 4 N。
(3)如果增大F2,物体A是否有可能向左运动?请说明理由 不可能,AB间,以及A与地面间摩擦力不变,A仍旧静止 。
【解答】解:(1)不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦,由力的平衡条件可得,弹簧测力计的示数F=3F2=3×6N=18N;
(2)由图知,水平使用滑轮组,n=2,fB=2F2=2×6N=12N,根据B向左做匀速直线运动可知物体A对B的摩擦力的方向向右,根据力的作用是相互的可知物体B对物体A的摩擦力向左,大小为12N;
物体A做匀速直线运动,受到的合力为0,因此物体A和地面之间的摩擦力:F4=F3﹣F1=12N﹣8N=4N;
(3)如果增大F2,B将做加速运动,B对A的压力和接触面的粗糙程度不变,B与A之间的摩擦力不变,A受力不变,同理可知,A受到地面的摩擦力也不变,即A的受力情况不变,还是处于静止状态。
故答案为:(1)18; (2)4; (3)不可能,AB间,以及A与地面间摩擦力不变,A仍旧静止。
25.图甲是脚踏式翻盖垃圾桶的实物图,通过两个水平杠杆组合实现脚踏翻盖,图乙为这两个杠杆AO1B和DCO2的示意图。已知桶盖重5N,重心位于DC中点的正上方,AO1=30cm,O1B=20cm,桶盖和连接杆的尺寸如图乙所示,脚踏杆AO1B和竖直连接杆BC的质量不计。
(1)杠杆DCO2阻力臂长度为 30cm ;
(2)若要把桶盖翻开,脚对踏板A处的压力至少为 20N 。
【解答】解:设顶杆对桶盖上C点的作用力为F2,EO2=EC+CO2=×50cm+5cm=30cm,
根据杠杆平衡条件可得:G×EO2=F2×CO2﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣②
根据力的作用是相互的可知:F1=F2,
则得:=,
所以,F=×G=×5N=20N。
故答案为:(1)30cm;(2)20。
26.如图所示,物体A重为200N,C、D滑轮重均为30N。物体B重为120N,它恰好能拉着A向右匀速运动,不计滑轮与绳子间摩擦。
(1)图中D为 动 (填“定”或“动”)滑轮。
(2)现用水平向左的拉力F作用于物体A上,使物体B匀速上升,则拉力F的大小为 150 N。
【解答】解:(1)由图可知,D滑轮随物体一起运动,因此D滑轮是动滑轮;C滑轮固定不动,因此C滑轮是定滑轮;
(2)由图可知,承担物重的绳子股数n=2,不计滑轮与绳子间摩擦,绳子自由端的拉力:F绳=(GB+G动)=×(120N+30N)=75N;
物体A匀速运动,则拉力和摩擦力是一对平衡力,所以物体A所受摩擦力:f=F绳=75N,
用一水平向左的力F拉动物体A,使物体B匀速上升,此时物体A受到摩擦力方向水平向右,由于压力和接触面的粗糙程度不变,所以摩擦力大小不变,
此时拉力:F=f+F绳=75N+75N=150N。
故答案为:(1)动;(2)150。
27.如图所示,每个滑轮重20牛,质量为60kg的人,站在质量为30kg的吊篮内,人至少用 220 N的拉力拉住绳子,才能使自己和吊篮在空中保持静止。(不计绳重及摩擦)
【解答】解:如图所示:
人和吊篮的总质量:
m=60kg+30kg=90kg,
人和吊篮受到的重力:
G=mg=90kg×10N/kg=900N,
有:2F+F1=G,F1=2F+G定,
则4F+G定=G,4F+20N=900N;
F=220N
故答案为:220。
三.实验探究题(共2小题)
28.如图所示是一个自制密度秤,其外形和杆秤差不多。其左端A点挂一个质量为0.2kg、体积为25cm3的铁块。提纽位于O处,秤砣放在B处时,秤杆恰好水平平衡。已知秤砣的质量为0.1kg,AO=5cm,BO=10cm。把铁块浸没在待测密度的液体中时,移动秤砣便可直接在杆上读出液体的密度。
(1)密度秤零刻度在O点右侧 10 cm处。
(2)现将铁块浸没在待测液体中,秤砣左移1.5cm到C点时,杠杆在水平位置重新平衡,则待测液体的密度为 1.2×103 kg/m3。
(3)关于该密度秤的刻度特点下列判断正确的有哪些 BCD 。
A.该密度秤的刻度不均匀
B.该密度秤的刻度左大右小
C.秤砣质量变小密度秤的精度变高
D.秤砣质量变大密度秤的量程变大
【解答】解:(1)已知OA=5cm=0.05m,OB=10cm=0.1m,
假设秤杆的重心到O点的距离为L,则有:G铁OA=G秤杆L+G秤砣OB,
即0.2kg×10N/kg×0.05m=G秤杆L+0.1kg×10N/kg×0.1cm,
解得:G秤杆L=0,则可知秤杆的重心在O点处;
如图甲所示,铁块没有浸在任何液体中,即可视为其测量的液体密度为0,则此时秤砣所处的位置B点即为该密度秤的0刻度处;
(2)当铁块浸没在液体中时,铁块排开液体的体积为V排=V铁=25cm3=2.5×10﹣5m3;
秤砣移到了C处,则OC=10cm﹣1.5cm=8.5cm=0.085m;
根据杠杆的平衡条件、阿基米德原理有:(G铁﹣F浮)OA=G秤砣OC,
即(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=0.1kg×10N/kg×0.085m,
解得:ρ液=1.2×103kg/m3;
(3)设秤砣到O点的距离为L′,液体的密度为ρ液′,液体所受的浮力为F浮′,
则有:(G铁﹣F浮′)OA=G秤砣L′,即(0.2kg×10N/kg﹣ρ液′×10N/kg×2.5×10﹣5m3)×0.05m=0.1kg×10N/kg×L′,
解得:ρ液′=8×103kg/m3﹣8×104kg/m4L′,
由此可知密度秤的刻度是均匀的,该密度秤的刻度左大右小,故A错误,B正确;
根据(G铁﹣F浮′)OA=(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=G秤砣L′可知秤砣质量变小密度秤的精度变高,故C正确;
根据(G铁﹣F浮′)OA=(0.2kg×10N/kg﹣ρ液×10N/kg×2.5×10﹣5m3)×0.05m=G秤砣L′可知秤砣质量变大密度秤的量程变大,故D正确。
故答案为:(1)10。(2)1.2×103kg/m3;(3)BCD。
29.小江在做“研究杠杆平衡条件”的实验中,进行了如下一系列操作:
a.把杠杆的中点支在支架上。
b.把钩码挂在杠杆的两边,改变钩码的位置使杠杆在水平位置平衡。
c.求出各次实验的动力乘以动力臂和阻力乘以阻力臂的数值。
d.改变力和力臂的数值,做三次实验;
e.记下两边钩码的重,用尺量出它们的力臂,记下实验数据;
f.调节平衡螺母,使杠杆在水平位置平衡。
(1)请你补充完整正确的实验操作顺序:a﹣f﹣ b﹣e﹣d ﹣c。
(2)实验中所用钩码的质量均相等,如图甲所示,杠杆在水平位置平衡;若再给两边各挂上一个钩码,则杠杆将 右端下沉 (填“仍平衡”“左端下沉”或“右端下沉”)。
(3)实验中保持钩码个数和位置不变,弹簧测力计的作用点固定,只改变测力计与水平方向的角度θ,如图乙所示,则下列能描述测力计示数F与θ关系的图像是 B 。
【解答】解:(1)探究杠杆平衡条件的实验时,首先把杠杆支在支架上,调节平衡螺母使杠杆在水平位置平衡,再挂钩码进行实验,记下两边钩码的重,用尺量出它们的力臂,记下实验数据,然后改变力和力臂的数值,做三次实验,最后总结杠杆平衡条件,故正确的实验操作顺序:a﹣f﹣b﹣c﹣d﹣c。
(2)若每个钩码重G,每个小格长L,如图甲所示,当杠杆平衡后,在A、B两点下方同时增加一个相同的钩码,则有4G×2L<3G×3L,左侧力与力臂的乘积小于右侧,故右端下沉;
(3)当测力计和杠杆的角度从0度逐渐增加到90度时,动力臂越来越大,动力越来越小,当测力计和杠杆垂直时,此时动力臂最大,动力最小,当测力计和杠杆的角度从90度逐渐增加到180度时,角度越大,动力臂越小,动力越大;由于θ不能达到180°,故选:B。
故答案为:(1)b﹣c﹣d;(2)右端下沉;(3)B。
四.解答题(共5小题)
30.如图所示,杆OA长为0.5米,O端用铰链铰于竖直墙面,杆中B处有一制动闸,OB为0.2米,闸厚d为0.04米,轮子C的半径R为0.2米,闸与轮间动摩擦因数μ为0.5.飞轮顺时针转动时,要对轮施加力矩(力×力臂)1000牛米才能使轮减速而制动,若杆与闸的重力不计,则在杆的A端需加垂直于杆的力F的大小为 4400 牛。
【解答】解:∵能使轮减速而制动时对轮施加力矩为1000牛米,即fR=1000N m,
∴f==5000N.闸对轮子
∵闸与轮间动摩擦因数μ为0.5,
∴由f=μN得:闸对轮子的压N===10000N,
根据力的作用是相互的可知:B点受到的竖直向上的支持力F2=N=10000N,
由于杠杆OAB受A端垂直于杆向下的力F、B点受到的竖直向上的支持力F2和轮子对它的水平向右的摩擦力f的作用,
则根据杠杆平衡条件得:FOA=F2OB+fd,
F===4400N。
故答案为:4400。
31.如图所示,在住宅中通常用固定在墙上的三角支架ABC放置空调外机。如果A处固定的螺钉脱落,则支架会倾翻造成空调外机坠落事件。已知AB长80cm,AC长50cm,室外机的重力为500N,重力作用线正好经过AB中点。
(1)在图中画出三角支架A处所受的水平作用力F的示意图及其力臂。
(2)计算三角支架A处所受的水平作用力F的大小(支架重力不计)。
(3)为了避免A处螺钉受力太大而脱落,导致支架倾翻空调外机坠落,安装师傅会将室外机向 A (填“A”或“B”) 靠近一些,理由是 根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小 。
【解答】解:(1)由图知C为支点,空调机压力使得杠杆顺时针转动A点的拉力阻碍转动,因而必须水平向左;根据力臂是从支点到力的作用线距离,画图如图;
由杠杆的平衡条件知:
F AC=G AB
即 F×50cm=500N××80cm
解得:F=400N。
(3)根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小,安装师傅会将室外机向A靠近一些。
答:(1)见解答图;
(2)三角支架A处所受的水平作用力F的大小为400N;
(3)A;根据杠杆的平衡条件F L1=G L2可知,G和L1不变的情况下,减小L2,可以使F减小。
32.为深入探究平衡木的平衡,小萍设计了如图装置。轻质杠杆AOB可绕支点O无摩擦转动,且AB=3m,OA=1m。在杠杆A端用不可伸长的细线悬挂正方体M,重力为1000N,边长为50cm。当重为500N的小萍静止站立在OB之间某处时,杠杆处于水平平衡状态。
(1)正方体M的密度;
(2)如图所示,小萍站立在距离B端1.5m处时,正方体M对水平地面的压强;
(3)若细线能承受的最大拉力为800N,小萍由O点向B以10cm/s的速度缓慢匀速行走,求小萍能安全行走的时间。
【解答】解:(1)由G=mg可得,正方体M的质量:
mM===100kg,
则正方体M的密度:
ρM===0.8×103kg/m3;
(2)小萍站立在距离B端L1=1.5m处时,由杠杆的平衡条件可得:
FA OA=G人 (AB﹣OA﹣L1),
即:FA×1m=500N×(3m﹣1m﹣1.5m),
解得:FA=250N,
由力作用的相互性可知,绳子对正方体M的拉力FA′=FA=250N,
正方体M对水平地面的压力:
F=GM﹣FA′=1000N﹣250N=750N,
正方体M对水平地面的压强:
p===3000Pa;
(3)细线能承受的最大拉力为800N,设细线达到800N时,小萍距离O点的距离为L2,
由杠杆的平衡条件可得:
FA大 OA=G人 L2,即800N×1m=500N×L2,
解得:L2=1.6m=160cm,
由v=可得,小萍能安全行走的时间:
t===16s。
答:(1)正方体M的密度为0.8×103kg/m3;
(2)小萍站立在距离B端1.5m处时,正方体M对水平地面的压强为3000Pa;
(3)小萍能安全行走的时间为16s。
33.如图是同学们利用实验室器材,组合成的监控水库水位的模拟装置,整个装置是由长方体A和B、滑轮组、轻质杠杆CD、台秤等组成。杠杆始终在水平位置平衡。
已知OC:OD=1:2,A的高度为50cm,底面积400cm2,重为550N,动滑轮重50N,B重300N,不计绳重与摩擦。求:
(1)水位上涨到A的上表面时,A受到的浮力;
(2)在台秤的刻度盘上刻上反映水位的刻度,当水位下降时,台秤示数会 变小 ,请说明理由 物体受到的浮力减小,C端绳子的拉力增大,根据杠杆的平衡条件可知当动力臂和阻力臂不变时;杠杆右侧对B的拉力增大,台秤示数减小 ;
(3)当柱体A有五分之二高度露出水面时,台秤处显示的压力为多大?
【解答】解:(1)A的高度为50cm,底面积400cm2,
当水位上涨到A的上表面时,A浸没在水中,所以V排=VA=Sh=50cm×400cm2=20000cm3=0.02m3,
所以A受到的浮力:F浮=ρ水gV排=1.0×103kg/m3×10N/kg×0.02m3=200N;
(2)当A物体露出水面时,V排′=VA=VA=×0.02m3=0.012m3,
物体A此时受到的浮力:F浮′=ρ水gV排=1.0×103kg/m3×10N/kg×0.012m3=120N,
物体A受到浮力和滑轮组的拉力与A的重力平衡,
所以物体A对滑轮组拉力F=GA﹣F浮′=550N﹣120N=430N,
根据力的作用的相互性可知,滑轮组绳子自由端对杠杆C端拉力与杠杆C端受到拉力大小相等,
不计绳重与摩擦,所以绳子对C端拉力FC=(F+G动)=×(430N+50N)=160N,
杠杆始终在水平位置平衡,O为支点,由杠杆平衡条件有:Fc OC=FD OD,
即:160N×OC=FD×OD,且OC:OD=1:2,
解得绳子对D端拉力:FD=80N,
所以B物体受到拉力为80N,
B物体受到的拉力、电子秤的支持力与B的重力平衡,
所以B受到的支持力F支=GB﹣F拉=300N﹣80N=220N,
所以电子秤受到B物体对它的压力大小等于220N。
答:(1)水位上涨到A的上表面时,A受到的浮力为200N;
(2)变小,物体受到的浮力减小,C端绳子的拉力增大,根据杠杆的平衡条件可知当动力臂和阻力臂不变时;杠杆右侧对B的拉力增大,台秤示数减小;
(3)当A物体五分之二露出水面时,电子秤所受的压力220N。
34.如图是上肢力量健身器示意图。杠杆AB可绕O点在竖直平面内转动,AB=3BO,配重的重力为90N。重力为500N的健身者通过细绳在B点施加400N竖直向下的拉力时,杠杆在水平位置平衡,配重对地面的压力恰好为零。(杠杆AB、绳重及摩擦均忽略不计)。
(1)健身过程中,配重被拉起时,健身器中的滑轮为 动滑轮 (选填“定滑轮”或“动滑轮”)。
(2)求配重对地面的压力恰好为零时A点受到的拉力。
(3)求滑轮的重力。
【解答】解:(1)健身过程中,人拉下杠杆的一端,滑轮随杠杆另一端一起上升,滑轮轴的位置变化,所以,此滑轮为动滑轮;
(2)因为AB=3BO,且AB=AO+OB,
所以,AO+OB=3BO,
AO=2OB,
根据杠杆的平衡条件得:FA×AO=FB×OB,
所以,FA==200N;
(3)据图可知,当配重对地面的压力恰好为零时,
连接配重的绳子上拉力:F=G=90N,
以滑轮为研究对象,力的关系满足:2F+G轮=FA,
所以,G轮=FA﹣2F=200N﹣2×90N=20N。
故答案为:(1)动滑轮;(2)配重对地面的压力恰好为零时A点受到的拉力为200N;(3)滑轮的重力为20N。
五.计算题(共2小题)
35.如图所示,将长为1.2米的轻质木棒(重力忽略不计)平放在水平方形台面上,左右两端点分别为A、B,它们距台面边缘处的距离均为0.3米。在A端挂一个重为30牛的物体,在B端挂一个重为G的物体。
(1)若G=30牛,台面收到木棒的压力为多少?
(2)若要使木棒右端下沉,B端挂的物体至少要大于多少?
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为多少?
【解答】解:(1)放在水平方形台面上轻质木棒受左右两物体的竖直向下的拉力和台面竖直向上的支持力,即F支持=F拉力=2G=2×30N=60N;
因为木板对台面的压力和台面对木棒的支持力是一道相互作用力,大小相等,即F压力=F支持=60N;
(2)此时L左=1.2m﹣0.3m=0.9m,L右=0.3m,
根据杠杆的平衡条件:GA×L左=GB×L右得。
B端挂的物体的重力:
GB===90N;
(3)若以右边缘为支点,右边力臂最小,力最大为90N;
若以左边缘为支点,右边力臂最大,力最小,此时L左′=0.3m,L右′=1.2m﹣0.3m=0.9m,
最小为:
F小===10N。
答:(1)若G=30牛,台面收到木棒的压力为60N;
(2)若要使木棒右端下沉,B端挂的物体至少要大于90N;
(3)若B端挂物体后,木棒仍在水平台面上保持静止,则G的取值范围为10N~90N。
36.为完成某水下工程,施工队要把一个圆柱体工件从水中提起。通过技术分析,采用质量为2吨、每个车轮与水平地面的接触面积为200cm2的四轮小型牵引车,通过牵引滑轮组匀速打捞起水中的圆柱体工件,小型牵引车始终保持2m/s不变的速度牵引,如图(a)所示。在打捞的过程中,小型牵引车的拉力功率P随打捞时间t的变化如图(b)所示。已知动滑轮重为200N,不计绳子与滑轮间的摩擦,g取10N/kg,试计算:
(1)在打捞的过程,小型牵引车对水平地面施加的压强是多少?
(2)在圆柱体工件没有露出水面前,所受到的浮力是多少?
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,滑轮组的机械效率是多少?
【解答】解:(1)货车空载时对水平地面的压力:
F=G车=m车g=2×103kg×10N/kg=2×104N;
受力面积S=200cm2×4=800cm2=0.08m2;
货车空载时对水平地面的压强:
p===2.5×105Pa;
(2)由图乙知,在圆柱体工件没有露出水面前,牵引功率P1=1400W,
由P===Fv得:
此时达到绳子的牵引拉力F1===700N,
由图知,滑轮组由3段绳子承担物重,由于使用滑轮组时不计绳子与滑轮间的摩擦,
拉力F=(G+G动),
所以,在圆柱体工件没有露出水面前,滑轮组对物体的提力:
G′=3F1﹣G动=3×700N﹣200N=1900N;
当圆柱体工件被拉出水面后在空中匀速上升的过程中,牵引功率P1=1600W,由P=Fv得:
此时达到绳子的牵引拉力F2===800N,
由拉力F=(G+G动)得:
物体重力G=3F2﹣G动=3×800N﹣200N=2200N;
所以,在圆柱体工件没有露出水面前,所受浮力为F浮=G﹣G′=2200N﹣1900N=300N;
(3)当圆柱体工件被拉出水面后在空中匀速上升的过程中,由于使用滑轮组时不计绳子与滑轮间的摩擦,
则η===,
所以,滑轮组的机械效率:
η=×100%=×100%≈92%。
答:(1)在打捞的过程,小型牵引车对水平地面施加的压强是2.5×105Pa;
(2)在圆柱体工件没有露出水面前,所受到的浮力是300N;
(3)当圆柱体工件被拉出水面后在空 中匀速上升的过程中,滑轮组的机械效率是92%。
(3)11.1%。
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)