超重和失重 专项练 2025年高考物理一轮复习备考
文档属性
| 名称 | 超重和失重 专项练 2025年高考物理一轮复习备考 | 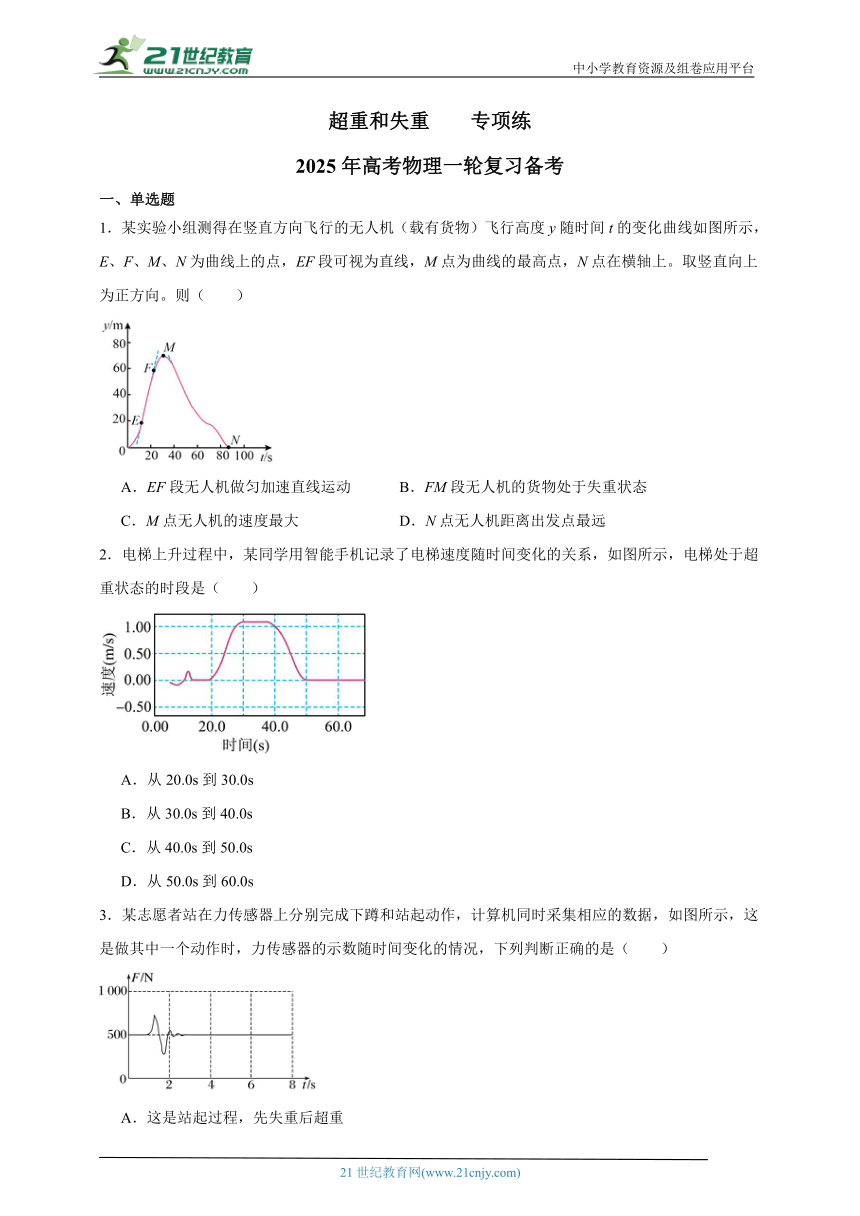 | |
| 格式 | docx | ||
| 文件大小 | 600.1KB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2024-11-11 16:17:00 | ||
图片预览
文档简介
中小学教育资源及组卷应用平台
超重和失重 专项练
2025年高考物理一轮复习备考
一、单选题
1.某实验小组测得在竖直方向飞行的无人机(载有货物)飞行高度y随时间t的变化曲线如图所示,E、F、M、N为曲线上的点,EF段可视为直线,M点为曲线的最高点,N点在横轴上。取竖直向上为正方向。则( )
A.EF段无人机做匀加速直线运动 B.FM段无人机的货物处于失重状态
C.M点无人机的速度最大 D.N点无人机距离出发点最远
2.电梯上升过程中,某同学用智能手机记录了电梯速度随时间变化的关系,如图所示,电梯处于超重状态的时段是( )
A.从20.0s到30.0s
B.从30.0s到40.0s
C.从40.0s到50.0s
D.从50.0s到60.0s
3.某志愿者站在力传感器上分别完成下蹲和站起动作,计算机同时采集相应的数据,如图所示,这是做其中一个动作时,力传感器的示数随时间变化的情况,下列判断正确的是( )
A.这是站起过程,先失重后超重
B.这是站起过程,先超重后失重
C.这是下蹲过程,先失重后超重
D.这是下蹲过程,先超重后失重
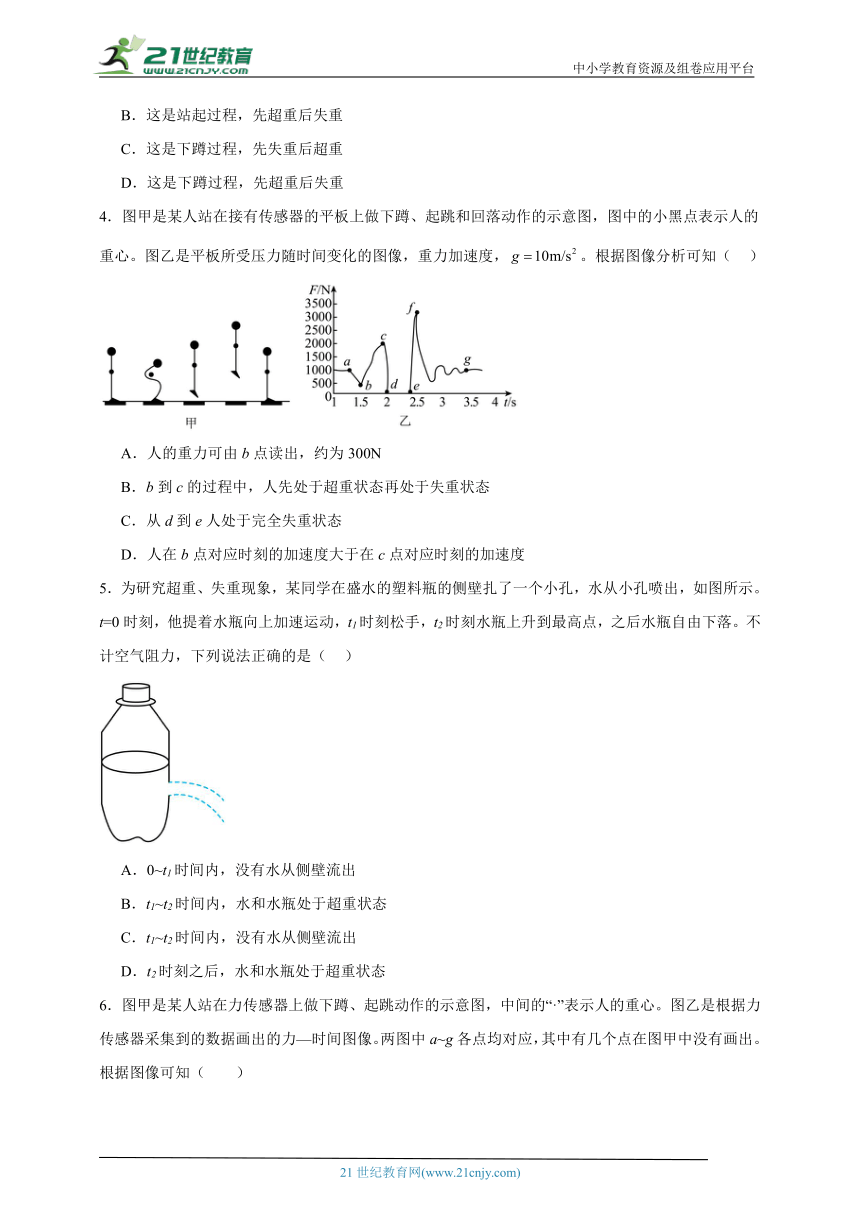
4.图甲是某人站在接有传感器的平板上做下蹲、起跳和回落动作的示意图,图中的小黑点表示人的重心。图乙是平板所受压力随时间变化的图像,重力加速度,。根据图像分析可知( )
A.人的重力可由b点读出,约为300N
B.b到c的过程中,人先处于超重状态再处于失重状态
C.从d到e人处于完全失重状态
D.人在b点对应时刻的加速度大于在c点对应时刻的加速度
5.为研究超重、失重现象,某同学在盛水的塑料瓶的侧壁扎了一个小孔,水从小孔喷出,如图所示。t=0时刻,他提着水瓶向上加速运动,t1时刻松手,t2时刻水瓶上升到最高点,之后水瓶自由下落。不计空气阻力,下列说法正确的是( )
A.0~t1时间内,没有水从侧壁流出
B.t1~t2时间内,水和水瓶处于超重状态
C.t1~t2时间内,没有水从侧壁流出
D.t2时刻之后,水和水瓶处于超重状态
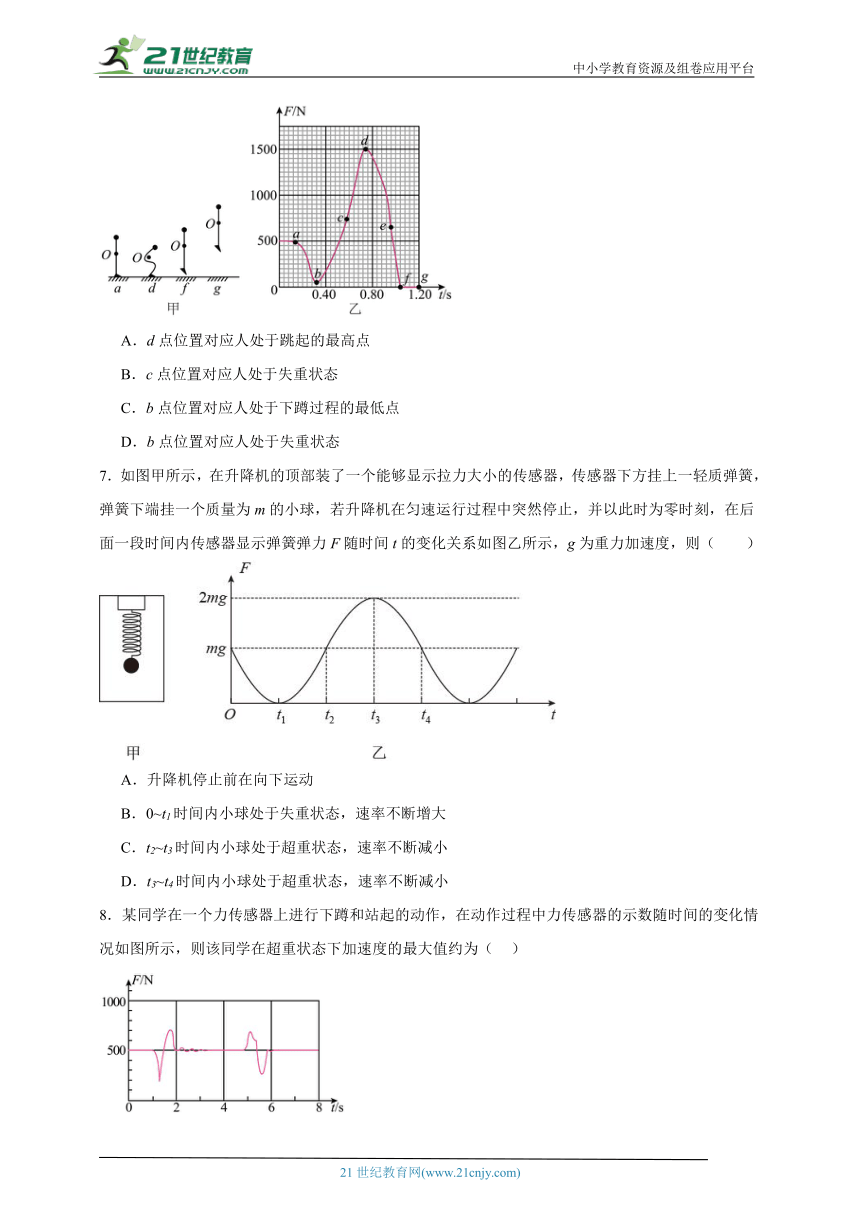
6.图甲是某人站在力传感器上做下蹲、起跳动作的示意图,中间的“·”表示人的重心。图乙是根据力传感器采集到的数据画出的力—时间图像。两图中a~g各点均对应,其中有几个点在图甲中没有画出。根据图像可知( )
A.d点位置对应人处于跳起的最高点
B.c点位置对应人处于失重状态
C.b点位置对应人处于下蹲过程的最低点
D.b点位置对应人处于失重状态
7.如图甲所示,在升降机的顶部装了一个能够显示拉力大小的传感器,传感器下方挂上一轻质弹簧,弹簧下端挂一个质量为m的小球,若升降机在匀速运行过程中突然停止,并以此时为零时刻,在后面一段时间内传感器显示弹簧弹力F随时间t的变化关系如图乙所示,g为重力加速度,则( )
A.升降机停止前在向下运动
B.0~t1时间内小球处于失重状态,速率不断增大
C.t2~t3时间内小球处于超重状态,速率不断减小
D.t3~t4时间内小球处于超重状态,速率不断减小
8.某同学在一个力传感器上进行下蹲和站起的动作,在动作过程中力传感器的示数随时间的变化情况如图所示,则该同学在超重状态下加速度的最大值约为( )
A. B. C. D.
二、多选题
9.2024年6月4日,“嫦娥六号”自月背取壤后,其上升器携带月壤离开月球。在上升器加速上升的过程中,其中的月壤( )
A.加速度向下 B.加速度向上
C.处于失重状态 D.处于超重状态
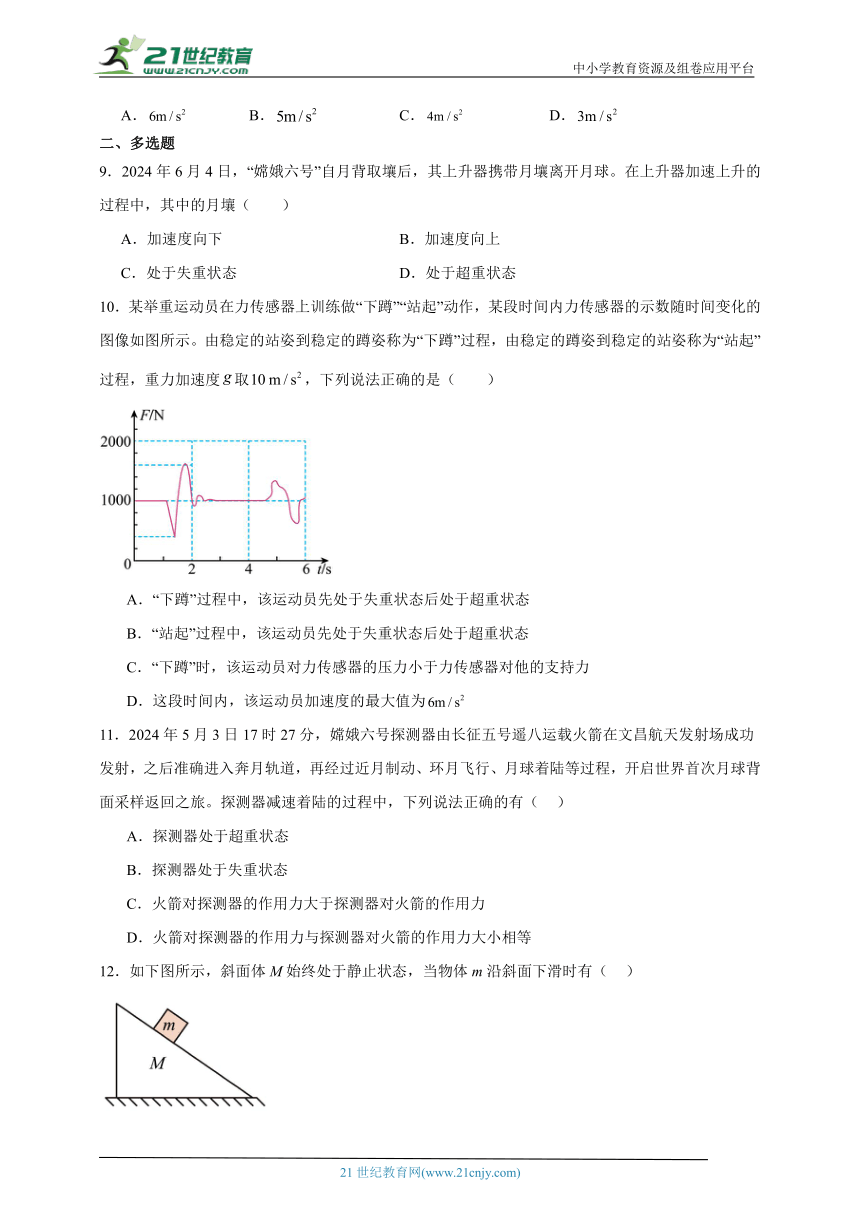
10.某举重运动员在力传感器上训练做“下蹲”“站起”动作,某段时间内力传感器的示数随时间变化的图像如图所示。由稳定的站姿到稳定的蹲姿称为“下蹲”过程,由稳定的蹲姿到稳定的站姿称为“站起”过程,重力加速度取,下列说法正确的是( )
A.“下蹲”过程中,该运动员先处于失重状态后处于超重状态
B.“站起”过程中,该运动员先处于失重状态后处于超重状态
C.“下蹲”时,该运动员对力传感器的压力小于力传感器对他的支持力
D.这段时间内,该运动员加速度的最大值为
11.2024年5月3日17时27分,嫦娥六号探测器由长征五号遥八运载火箭在文昌航天发射场成功发射,之后准确进入奔月轨道,再经过近月制动、环月飞行、月球着陆等过程,开启世界首次月球背面采样返回之旅。探测器减速着陆的过程中,下列说法正确的有( )
A.探测器处于超重状态
B.探测器处于失重状态
C.火箭对探测器的作用力大于探测器对火箭的作用力
D.火箭对探测器的作用力与探测器对火箭的作用力大小相等
12.如下图所示,斜面体M始终处于静止状态,当物体m沿斜面下滑时有( )
A.加速下滑时,M对地面压力等于 B.减速下滑时,M对地面压力大于
C.加速下滑时,M对地面压力大于 D.匀速下滑时,M对地面压力始终等于
三、实验题
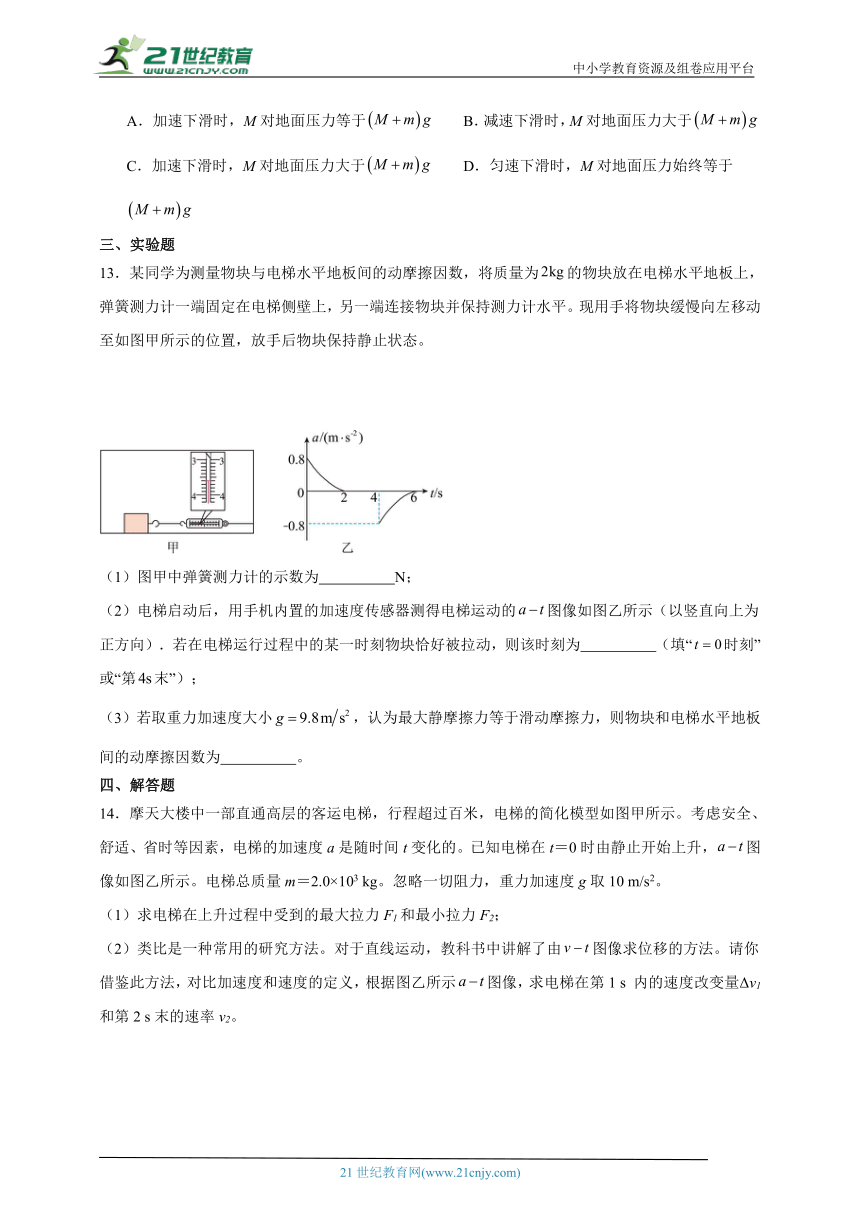
13.某同学为测量物块与电梯水平地板间的动摩擦因数,将质量为的物块放在电梯水平地板上,弹簧测力计一端固定在电梯侧壁上,另一端连接物块并保持测力计水平。现用手将物块缓慢向左移动至如图甲所示的位置,放手后物块保持静止状态。
(1)图甲中弹簧测力计的示数为 N;
(2)电梯启动后,用手机内置的加速度传感器测得电梯运动的图像如图乙所示(以竖直向上为正方向).若在电梯运行过程中的某一时刻物块恰好被拉动,则该时刻为 (填“时刻”或“第末”);
(3)若取重力加速度大小,认为最大静摩擦力等于滑动摩擦力,则物块和电梯水平地板间的动摩擦因数为 。
四、解答题
14.摩天大楼中一部直通高层的客运电梯,行程超过百米,电梯的简化模型如图甲所示。考虑安全、舒适、省时等因素,电梯的加速度a是随时间t变化的。已知电梯在t=0时由静止开始上升,图像如图乙所示。电梯总质量m=2.0×103 kg。忽略一切阻力,重力加速度g取10 m/s2。
(1)求电梯在上升过程中受到的最大拉力F1和最小拉力F2;
(2)类比是一种常用的研究方法。对于直线运动,教科书中讲解了由图像求位移的方法。请你借鉴此方法,对比加速度和速度的定义,根据图乙所示图像,求电梯在第1 s 内的速度改变量Δv1和第2 s末的速率v2。
15.如图所示,小明同学操控一无人机悬浮在离地面的空中,无人机下面用一短细线拴接着一个质量为的小钢球A。某时刻小明同学让无人机做自由落体运动,落到离地面高时,小明同学让无人机做竖直向下的匀减速直线运动,到达地面时速度刚好为零,,求:
(1)这个过程中无人机的最大速率;
(2)无人机做自由落体运动时,细线对小钢球拉力的大小;
(3)小钢球做匀减速直线运动时,细线对小钢球拉力的大小。
参考答案:
1.B
A .根据y-t图像的斜率表示无人机的速度,因EF段可视为直线,故EF段的速度不变,即EF段无人机做匀速直线运动,故A错误;
BC.根据y-t图像的斜率表示无人机的速度,FM段无人机的速度不断减小,在M点无人机的速度为零,故在FM段无人机的加速度向下,故货物处于失重状态,故B正确,C错误;
D.由图可知,M点离出发点最远,N点表示无人机回到出发点,故D错误。
2.A
A.图像的斜率表示加速度,从20.0s到30.0s,同学有向上的加速度,处于超重状态,故A正确;
B.从30.0s到40.0s,同学的加速度为零,处于平衡状态,故B错误;
C.从40.0s到50.0s,同学有向下的加速度,处于失重状态,故C错误;
D.从50.0s到60.0s,同学的加速度为零,处于平衡状态,故D错误。
3.B
根据图象可以知,志愿者先超重再失重,即其加速度先向上后向下,是站起过程。
4.C
A.人在a点处于平衡状态,人的重力可由a点读出,约为900N,A错误;
B.b到c的过程中,人对平板的压力先小于重力后大于重力,所以人先处于失重状态再处于超重状态,B错误;
C.从d到e人对平板的压力等于零,所以人处于完全失重状态,C正确;
D.人的质量约为
人在b点对应时刻的加速度约为
人在c点对应时刻的加速度约为
人在b点对应时刻的加速度小于在c点对应时刻的加速度,D错误。
5.C
A.时刻,手提着水瓶向上加速,整体处于超重状态,一定会有水从小孔流出,故A错误;
BC.时刻水和水瓶只受重力的作用,处于完全失重的状态,水和水之间无相互作用,因此不会有水从侧壁流出,故B错误,C正确;
D.时刻之后,水瓶和水依然处于完全失重的状态,没有水从侧壁流出,故D错误。
6.D
AB.由题图乙可知,人的重力约为500 N,d、c点位置人所受支持力大于重力,尚未离地,且人的加速度向上,处于超重状态,A、B错误;
CD.b点位置人所受支持力小于重力,人的加速度向下,处于失重状态,且b点位置对应人处于下蹲过程,加速度方向向下,处于减速阶段,还没有到达最低点,C错误,D正确。
7.C
A.升降机在匀速运行过程中突然停止,由于惯性,小球会继续沿着原来的 运动方向运动一段时间,弹簧处于伸长状态,时间内,小球处于失重状态,弹簧弹力由mg减小为0,说明弹簧逐渐恢复原长,升降机停止前在向上运动,小球在继续向上运动,A错误;
B.时间内,拉力小于重力,小球处于失重状态,加速度的方向向下,与速度反向,则速度逐渐减小,B错误;
CD.同理分析可得:时间内,小球向上减速,加速度方向一直向下,小球处于失重状态;时间内,小球向下加速,加速度方向一直向下,小球处于失重状态;时间内,小球向下减速,加速度方向一直向上,小球处于超重状态;时间内,小球向上加速,加速度方向一直向上,小球处于超重状态,C正确,D错误。
8.C
由图可知该同学的重力为,质量为,该同学在超重状态下加速度最大时,达到最大值约为,根据牛顿第二定律有
解得
9.BD
AB.在上升器加速上升的过程中,月壤的加速度向上,故A错误,B正确;
CD.因加速度向上,故月壤处于超重状态,故C错误,D正确。
10.AD
A.“下蹲”过程中,该运动员先向下加速后向下减速,同时力传感器上的示数先小于重力,后大于重力,则该运动员先处于失重状态后处于超重状态,故A正确;
B.“站起”过程中,该运动员先向上加速后向上减速,同时力传感器上的示数先大于重力,后小于重力,则该运动员先处于超重状态后处于失重状态,故B错误;
C.“下蹲”时,该运动员对力传感器的压力和力传感器对他的支持力是一对相互作用力,一定大小相等,方向相反,故C错误;
D.根据图像可知举重运动员在稳定的站姿和稳定的蹲姿状态中在竖直方向上受平衡力作用,可知该运动员重力为,则该运动员质量
力传感器示数最小时,处于失重状态,此时向下的加速度最大,此加速度大小
力传感器示数最大时,处于超重状态,此时向上的加速度最大,此加速度大小
则这段时间内,该运动员加速度的最大值为,故D正确。
11.AD
A B.探测器减速着陆的过程中,加速度向上,探测器处于超重状态,故A正确,B错误;
C D.由牛顿第三定律,火箭对探测器的作用力与探测器对火箭的作用力大小相等,故C错误,D正确;
12.BD
把两物体当成一个整体,运用整体法进行分析。
物体匀速下滑时,整体处于平衡状态,地面的支持力等于;
物体加速下滑时,整体重心加速下降,处于失重状态,根据牛顿第三定律可知,斜面体对地面的压力小于;
同理,物体减速下滑时,整体处于超重状态,斜面体对地面的压力大于。
13. 3.60/3.59/3.61 第末 0.2
(1)[1]测力计的指针指在3.6处,测力计精确度为0.1N,测力计需估读一位,所以读数为3.60N;
(2)[2]由图像可知,0~2s内,电梯处于超重状态,则物块对电梯的压力大于重力,最大静摩擦力较大,物块相对电梯静止,4~6内,电梯处于失重状态,物块对电梯的压力小于重力,且加速度减小,所以若某一时刻物块恰好被拉动,应该是压力最小的时刻即向下的加速度最大的时刻,也就是第4s末;
(3)[3]在第4s末,对物块竖直方向上由牛顿第二定律有
滑动摩擦力为
联立可得
14.(1)2.2×104N,1.8×104N;(2)0.5m/s;1.5m/s
(1)由牛顿第二定律,有
F-mg=ma
可得,加速度最大时,电梯受到的拉力最大,加速度向下且数字最大时,电梯受到拉力最小,的由a-t图像可知,F1和F2对应的加速度分别是
a1=1.0 m/s2,a2=-1.0 m/s2
则
F1=m(g+a1)=2.0×103×(10+1.0) N=2.2×104 N
F2=m(g+a2)=2.0×103×(10-1.0) N=1.8×104 N
(2)类比可得,所求速度变化量等于第1 s内a-t图线下的面积
同理可得,在0~2s内,电梯速度变化量为
由于v0=0,第2 s末的速率
v2=1.5 m/s
15.(1);(2)0;(3)
(1)由题可知,自由落体结束时无人机的速率最大;自由下降的高度
由自由落体运动的规律可得
(2)无人机做自由落体运动时,处于完全失重状态,所以细线对小钢球拉力的大小为零。
(3)设小钢球A做匀减速直线运动时加速度大小为a,运动距离为,则有
解得
设细线对小钢球拉力为F,根据牛顿第二定律得
解得
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)
超重和失重 专项练
2025年高考物理一轮复习备考
一、单选题
1.某实验小组测得在竖直方向飞行的无人机(载有货物)飞行高度y随时间t的变化曲线如图所示,E、F、M、N为曲线上的点,EF段可视为直线,M点为曲线的最高点,N点在横轴上。取竖直向上为正方向。则( )
A.EF段无人机做匀加速直线运动 B.FM段无人机的货物处于失重状态
C.M点无人机的速度最大 D.N点无人机距离出发点最远
2.电梯上升过程中,某同学用智能手机记录了电梯速度随时间变化的关系,如图所示,电梯处于超重状态的时段是( )
A.从20.0s到30.0s
B.从30.0s到40.0s
C.从40.0s到50.0s
D.从50.0s到60.0s
3.某志愿者站在力传感器上分别完成下蹲和站起动作,计算机同时采集相应的数据,如图所示,这是做其中一个动作时,力传感器的示数随时间变化的情况,下列判断正确的是( )
A.这是站起过程,先失重后超重
B.这是站起过程,先超重后失重
C.这是下蹲过程,先失重后超重
D.这是下蹲过程,先超重后失重
4.图甲是某人站在接有传感器的平板上做下蹲、起跳和回落动作的示意图,图中的小黑点表示人的重心。图乙是平板所受压力随时间变化的图像,重力加速度,。根据图像分析可知( )
A.人的重力可由b点读出,约为300N
B.b到c的过程中,人先处于超重状态再处于失重状态
C.从d到e人处于完全失重状态
D.人在b点对应时刻的加速度大于在c点对应时刻的加速度
5.为研究超重、失重现象,某同学在盛水的塑料瓶的侧壁扎了一个小孔,水从小孔喷出,如图所示。t=0时刻,他提着水瓶向上加速运动,t1时刻松手,t2时刻水瓶上升到最高点,之后水瓶自由下落。不计空气阻力,下列说法正确的是( )
A.0~t1时间内,没有水从侧壁流出
B.t1~t2时间内,水和水瓶处于超重状态
C.t1~t2时间内,没有水从侧壁流出
D.t2时刻之后,水和水瓶处于超重状态
6.图甲是某人站在力传感器上做下蹲、起跳动作的示意图,中间的“·”表示人的重心。图乙是根据力传感器采集到的数据画出的力—时间图像。两图中a~g各点均对应,其中有几个点在图甲中没有画出。根据图像可知( )
A.d点位置对应人处于跳起的最高点
B.c点位置对应人处于失重状态
C.b点位置对应人处于下蹲过程的最低点
D.b点位置对应人处于失重状态
7.如图甲所示,在升降机的顶部装了一个能够显示拉力大小的传感器,传感器下方挂上一轻质弹簧,弹簧下端挂一个质量为m的小球,若升降机在匀速运行过程中突然停止,并以此时为零时刻,在后面一段时间内传感器显示弹簧弹力F随时间t的变化关系如图乙所示,g为重力加速度,则( )
A.升降机停止前在向下运动
B.0~t1时间内小球处于失重状态,速率不断增大
C.t2~t3时间内小球处于超重状态,速率不断减小
D.t3~t4时间内小球处于超重状态,速率不断减小
8.某同学在一个力传感器上进行下蹲和站起的动作,在动作过程中力传感器的示数随时间的变化情况如图所示,则该同学在超重状态下加速度的最大值约为( )
A. B. C. D.
二、多选题
9.2024年6月4日,“嫦娥六号”自月背取壤后,其上升器携带月壤离开月球。在上升器加速上升的过程中,其中的月壤( )
A.加速度向下 B.加速度向上
C.处于失重状态 D.处于超重状态
10.某举重运动员在力传感器上训练做“下蹲”“站起”动作,某段时间内力传感器的示数随时间变化的图像如图所示。由稳定的站姿到稳定的蹲姿称为“下蹲”过程,由稳定的蹲姿到稳定的站姿称为“站起”过程,重力加速度取,下列说法正确的是( )
A.“下蹲”过程中,该运动员先处于失重状态后处于超重状态
B.“站起”过程中,该运动员先处于失重状态后处于超重状态
C.“下蹲”时,该运动员对力传感器的压力小于力传感器对他的支持力
D.这段时间内,该运动员加速度的最大值为
11.2024年5月3日17时27分,嫦娥六号探测器由长征五号遥八运载火箭在文昌航天发射场成功发射,之后准确进入奔月轨道,再经过近月制动、环月飞行、月球着陆等过程,开启世界首次月球背面采样返回之旅。探测器减速着陆的过程中,下列说法正确的有( )
A.探测器处于超重状态
B.探测器处于失重状态
C.火箭对探测器的作用力大于探测器对火箭的作用力
D.火箭对探测器的作用力与探测器对火箭的作用力大小相等
12.如下图所示,斜面体M始终处于静止状态,当物体m沿斜面下滑时有( )
A.加速下滑时,M对地面压力等于 B.减速下滑时,M对地面压力大于
C.加速下滑时,M对地面压力大于 D.匀速下滑时,M对地面压力始终等于
三、实验题
13.某同学为测量物块与电梯水平地板间的动摩擦因数,将质量为的物块放在电梯水平地板上,弹簧测力计一端固定在电梯侧壁上,另一端连接物块并保持测力计水平。现用手将物块缓慢向左移动至如图甲所示的位置,放手后物块保持静止状态。
(1)图甲中弹簧测力计的示数为 N;
(2)电梯启动后,用手机内置的加速度传感器测得电梯运动的图像如图乙所示(以竖直向上为正方向).若在电梯运行过程中的某一时刻物块恰好被拉动,则该时刻为 (填“时刻”或“第末”);
(3)若取重力加速度大小,认为最大静摩擦力等于滑动摩擦力,则物块和电梯水平地板间的动摩擦因数为 。
四、解答题
14.摩天大楼中一部直通高层的客运电梯,行程超过百米,电梯的简化模型如图甲所示。考虑安全、舒适、省时等因素,电梯的加速度a是随时间t变化的。已知电梯在t=0时由静止开始上升,图像如图乙所示。电梯总质量m=2.0×103 kg。忽略一切阻力,重力加速度g取10 m/s2。
(1)求电梯在上升过程中受到的最大拉力F1和最小拉力F2;
(2)类比是一种常用的研究方法。对于直线运动,教科书中讲解了由图像求位移的方法。请你借鉴此方法,对比加速度和速度的定义,根据图乙所示图像,求电梯在第1 s 内的速度改变量Δv1和第2 s末的速率v2。
15.如图所示,小明同学操控一无人机悬浮在离地面的空中,无人机下面用一短细线拴接着一个质量为的小钢球A。某时刻小明同学让无人机做自由落体运动,落到离地面高时,小明同学让无人机做竖直向下的匀减速直线运动,到达地面时速度刚好为零,,求:
(1)这个过程中无人机的最大速率;
(2)无人机做自由落体运动时,细线对小钢球拉力的大小;
(3)小钢球做匀减速直线运动时,细线对小钢球拉力的大小。
参考答案:
1.B
A .根据y-t图像的斜率表示无人机的速度,因EF段可视为直线,故EF段的速度不变,即EF段无人机做匀速直线运动,故A错误;
BC.根据y-t图像的斜率表示无人机的速度,FM段无人机的速度不断减小,在M点无人机的速度为零,故在FM段无人机的加速度向下,故货物处于失重状态,故B正确,C错误;
D.由图可知,M点离出发点最远,N点表示无人机回到出发点,故D错误。
2.A
A.图像的斜率表示加速度,从20.0s到30.0s,同学有向上的加速度,处于超重状态,故A正确;
B.从30.0s到40.0s,同学的加速度为零,处于平衡状态,故B错误;
C.从40.0s到50.0s,同学有向下的加速度,处于失重状态,故C错误;
D.从50.0s到60.0s,同学的加速度为零,处于平衡状态,故D错误。
3.B
根据图象可以知,志愿者先超重再失重,即其加速度先向上后向下,是站起过程。
4.C
A.人在a点处于平衡状态,人的重力可由a点读出,约为900N,A错误;
B.b到c的过程中,人对平板的压力先小于重力后大于重力,所以人先处于失重状态再处于超重状态,B错误;
C.从d到e人对平板的压力等于零,所以人处于完全失重状态,C正确;
D.人的质量约为
人在b点对应时刻的加速度约为
人在c点对应时刻的加速度约为
人在b点对应时刻的加速度小于在c点对应时刻的加速度,D错误。
5.C
A.时刻,手提着水瓶向上加速,整体处于超重状态,一定会有水从小孔流出,故A错误;
BC.时刻水和水瓶只受重力的作用,处于完全失重的状态,水和水之间无相互作用,因此不会有水从侧壁流出,故B错误,C正确;
D.时刻之后,水瓶和水依然处于完全失重的状态,没有水从侧壁流出,故D错误。
6.D
AB.由题图乙可知,人的重力约为500 N,d、c点位置人所受支持力大于重力,尚未离地,且人的加速度向上,处于超重状态,A、B错误;
CD.b点位置人所受支持力小于重力,人的加速度向下,处于失重状态,且b点位置对应人处于下蹲过程,加速度方向向下,处于减速阶段,还没有到达最低点,C错误,D正确。
7.C
A.升降机在匀速运行过程中突然停止,由于惯性,小球会继续沿着原来的 运动方向运动一段时间,弹簧处于伸长状态,时间内,小球处于失重状态,弹簧弹力由mg减小为0,说明弹簧逐渐恢复原长,升降机停止前在向上运动,小球在继续向上运动,A错误;
B.时间内,拉力小于重力,小球处于失重状态,加速度的方向向下,与速度反向,则速度逐渐减小,B错误;
CD.同理分析可得:时间内,小球向上减速,加速度方向一直向下,小球处于失重状态;时间内,小球向下加速,加速度方向一直向下,小球处于失重状态;时间内,小球向下减速,加速度方向一直向上,小球处于超重状态;时间内,小球向上加速,加速度方向一直向上,小球处于超重状态,C正确,D错误。
8.C
由图可知该同学的重力为,质量为,该同学在超重状态下加速度最大时,达到最大值约为,根据牛顿第二定律有
解得
9.BD
AB.在上升器加速上升的过程中,月壤的加速度向上,故A错误,B正确;
CD.因加速度向上,故月壤处于超重状态,故C错误,D正确。
10.AD
A.“下蹲”过程中,该运动员先向下加速后向下减速,同时力传感器上的示数先小于重力,后大于重力,则该运动员先处于失重状态后处于超重状态,故A正确;
B.“站起”过程中,该运动员先向上加速后向上减速,同时力传感器上的示数先大于重力,后小于重力,则该运动员先处于超重状态后处于失重状态,故B错误;
C.“下蹲”时,该运动员对力传感器的压力和力传感器对他的支持力是一对相互作用力,一定大小相等,方向相反,故C错误;
D.根据图像可知举重运动员在稳定的站姿和稳定的蹲姿状态中在竖直方向上受平衡力作用,可知该运动员重力为,则该运动员质量
力传感器示数最小时,处于失重状态,此时向下的加速度最大,此加速度大小
力传感器示数最大时,处于超重状态,此时向上的加速度最大,此加速度大小
则这段时间内,该运动员加速度的最大值为,故D正确。
11.AD
A B.探测器减速着陆的过程中,加速度向上,探测器处于超重状态,故A正确,B错误;
C D.由牛顿第三定律,火箭对探测器的作用力与探测器对火箭的作用力大小相等,故C错误,D正确;
12.BD
把两物体当成一个整体,运用整体法进行分析。
物体匀速下滑时,整体处于平衡状态,地面的支持力等于;
物体加速下滑时,整体重心加速下降,处于失重状态,根据牛顿第三定律可知,斜面体对地面的压力小于;
同理,物体减速下滑时,整体处于超重状态,斜面体对地面的压力大于。
13. 3.60/3.59/3.61 第末 0.2
(1)[1]测力计的指针指在3.6处,测力计精确度为0.1N,测力计需估读一位,所以读数为3.60N;
(2)[2]由图像可知,0~2s内,电梯处于超重状态,则物块对电梯的压力大于重力,最大静摩擦力较大,物块相对电梯静止,4~6内,电梯处于失重状态,物块对电梯的压力小于重力,且加速度减小,所以若某一时刻物块恰好被拉动,应该是压力最小的时刻即向下的加速度最大的时刻,也就是第4s末;
(3)[3]在第4s末,对物块竖直方向上由牛顿第二定律有
滑动摩擦力为
联立可得
14.(1)2.2×104N,1.8×104N;(2)0.5m/s;1.5m/s
(1)由牛顿第二定律,有
F-mg=ma
可得,加速度最大时,电梯受到的拉力最大,加速度向下且数字最大时,电梯受到拉力最小,的由a-t图像可知,F1和F2对应的加速度分别是
a1=1.0 m/s2,a2=-1.0 m/s2
则
F1=m(g+a1)=2.0×103×(10+1.0) N=2.2×104 N
F2=m(g+a2)=2.0×103×(10-1.0) N=1.8×104 N
(2)类比可得,所求速度变化量等于第1 s内a-t图线下的面积
同理可得,在0~2s内,电梯速度变化量为
由于v0=0,第2 s末的速率
v2=1.5 m/s
15.(1);(2)0;(3)
(1)由题可知,自由落体结束时无人机的速率最大;自由下降的高度
由自由落体运动的规律可得
(2)无人机做自由落体运动时,处于完全失重状态,所以细线对小钢球拉力的大小为零。
(3)设小钢球A做匀减速直线运动时加速度大小为a,运动距离为,则有
解得
设细线对小钢球拉力为F,根据牛顿第二定律得
解得
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)
同课章节目录