6.5 杠杆 课件(共25张PPT) 2024~2025学年物理粤沪版八年级下册
文档属性
| 名称 | 6.5 杠杆 课件(共25张PPT) 2024~2025学年物理粤沪版八年级下册 |
|
|
| 格式 | pptx | ||
| 文件大小 | 3.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 沪粤版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-01-10 00:00:00 | ||
图片预览




文档简介
(共25张PPT)
第六章 力和机械
第5节 杠杆
1.认识杠杆,了解关于杠杆的五要素。
2.通过实验,探究杠杆的平衡条件。
3.知道杠杆的分类及应用。
学习目标
阿基米德曾经说过:“给我一个支点和一根足够长的杠杆,我就能撬动地球”。
你认为阿基米德的愿望能实现吗?
新知导入
观察下面图形,找出它们的共同特征。
它们的共同特征:都是绕着某一固定点转动
知识点一:认识杠杆
新知学习
1. 定义
物理学中,把在力的作用下能绕某一固定点转动的硬棒(直棒或曲棒),
叫做杠杆。
F2阻力
l1动力臂
l2阻力臂
(动力作用线)
(阻力作用线)
O支点
杠杆绕着转动的固定点
使杠杆转
动的力
阻碍杠杆
转动的力
支点到动力作用线
的垂直距离
支点到阻力作用线
的垂直距离
F1动力
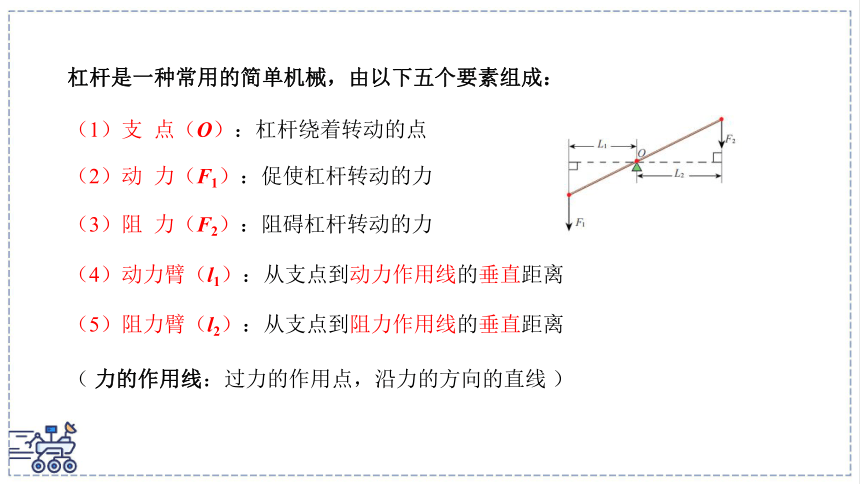
2. 杠杆五要素
(1)支 点(O):杠杆绕着转动的点
(2)动 力(F1):促使杠杆转动的力
(3)阻 力(F2):阻碍杠杆转动的力
(4)动力臂(l1):从支点到动力作用线的垂直距离
(5)阻力臂(l2):从支点到阻力作用线的垂直距离
( 力的作用线:过力的作用点,沿力的方向的直线 )
杠杆是一种常用的简单机械,由以下五个要素组成:
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,定力臂
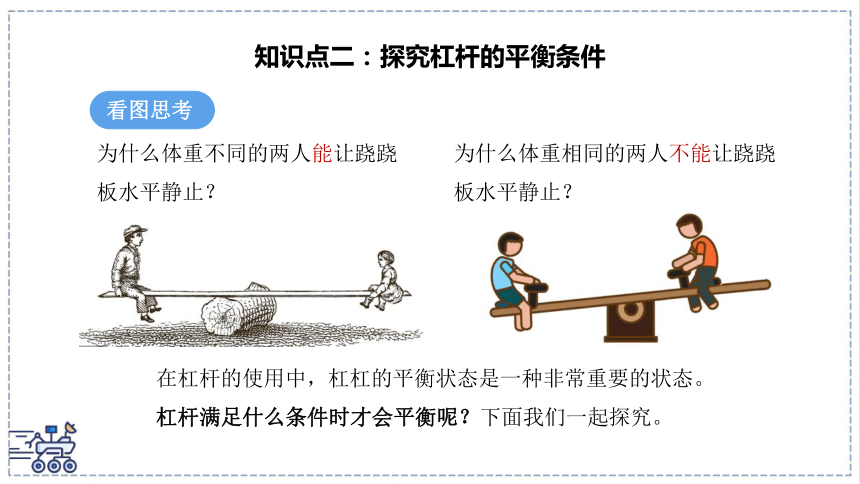
看图思考
为什么体重不同的两人能让跷跷板水平静止?
在杠杆的使用中,杠杠的平衡状态是一种非常重要的状态。
杠杆满足什么条件时才会平衡呢?下面我们一起探究。
为什么体重相同的两人不能让跷跷板水平静止?
知识点二:探究杠杆的平衡条件
实验:探究杠杆的平衡条件
实验步骤
思考:怎么调?调到水平平衡的目的是什么?
(1)首先调节杠杆两端的螺母,使杠杆处于水平平衡状态。
调节方法:杠杆哪端高,就向哪端调节平衡螺母。
①保证力臂沿杠杆,便于测量;
②消除杠杆自身重力对实验结果的影响。
目的:
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
目的:保证力臂沿杠杆,便于测量力臂。
注意:此时不能再调平衡螺母
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再多做几次实验。
目的:避免结论的偶然性,
寻找杠杆平衡的普遍性规律。
次数 动力 F1 /N 动力臂 l1 /cm 阻力 F2 /N 阻力臂
l2 /cm
1 1 15 3 5
2 2 10 2 10
3 3 10 2 15
4 2 20 4 10
……
(4)将几次实验的动力F1、阻力F2、动力臂l1、阻力臂l2分别记录在表格中。
实验分析
杠杆平衡时,动力×动力臂=阻力×阻力臂。
注意:
这就是阿基米德
发现的杠杆原理。
杠杆平衡的条件:
(2)杠杆是否平衡,取决于力和力臂的乘积;
乘积相等就平衡;否则沿着乘积大的那端转动。
(1)应用公式计算时,单位要统一,即动力和阻力
的单位要用牛(N),动力臂和阻力臂的单位要相同。
实验结论
【例题】假如图中大人所受的重力大小为 750 N,小朋友所受的重力大小为250 N。当大人坐在离跷跷板的转轴0.5 m 处时,小朋友应该坐在哪里才能使跷跷板水平平衡?
杠杆平衡条件的计算
根据杠杆平衡的条件F1l1=F2l2 ,得
解:
l1
=
F2l2
F1
=
750N×0.5 m
250N
=1.5m
答:小朋友应该坐在离跷跷板的转轴1.5 m处。
F1
F2
动力臂l1
阻力臂l2
由 F1l1=F2l2
∵l1 >l2
∴F1< F2
动力臂大于阻力臂,动力小于阻力,是省力杠杆。
O
1.省力杠杆
知识点三:杠杆的分类及应用
在生活中,你还发现了哪些工具是省力杠杆,其作用是什么?
作用:可以省力,但费距离。
请注意观察,赛艇的船
桨在划水时,它的动力
臂和阻力臂,哪个更长
呢?我们在使用时,是
省力了还是费力了呢?
想想议议
由 F1l1=F2l2
∵l1 < l2
∴F1 > F2
动力臂小于阻力臂,动力大于阻力,是费力杠杆。
2.费力杠杆
作用:使用费力杠杆,虽然费了力,但省了动力作用点移动的距离。
动力臂等于阻力臂,动力等于阻力,是等臂杠杆。
托盘天平
物理天平
3.等臂杠杆
作用:既不省力,也不费力。
人体内许多部位的骨骼和肌肉组织也构成杠杆。如图所示,手上握着或托着重物时,可将手、手腕、尺骨和桡骨看作一个整体,并与肘关节(相当于支点)组成了杠杆。
人体内的杠杆
人的前臂工作示意图
杠杆的五要素:支点、动力、动力臂、阻力、阻力臂。
杠杆的定义:物理学中,把能绕某一固定点转动的硬棒(直棒或曲棒),叫做杠杆。
杠杆的平衡条件:动力 动力臂=阻力 阻力臂 (即:F1l1=F2l2)
杠杆
杠杆的分类及作用:省力杠杆、费力杠杆、等臂杠杆
课堂小结
1.如图是开瓶盖的起子,可以看成是一个杠杆,能正确表示出杠杆的支点、动力和阻力的图是( )
A B C D
C
课堂练习
2.如图所示的杠杆,动力F 的力臂是( )
A.OD B.OF
C.OA D.OC
D
3.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂( )个钩码。
A.1
B.2
C.3
D.4
C
第六章 力和机械
第5节 杠杆
1.认识杠杆,了解关于杠杆的五要素。
2.通过实验,探究杠杆的平衡条件。
3.知道杠杆的分类及应用。
学习目标
阿基米德曾经说过:“给我一个支点和一根足够长的杠杆,我就能撬动地球”。
你认为阿基米德的愿望能实现吗?
新知导入
观察下面图形,找出它们的共同特征。
它们的共同特征:都是绕着某一固定点转动
知识点一:认识杠杆
新知学习
1. 定义
物理学中,把在力的作用下能绕某一固定点转动的硬棒(直棒或曲棒),
叫做杠杆。
F2阻力
l1动力臂
l2阻力臂
(动力作用线)
(阻力作用线)
O支点
杠杆绕着转动的固定点
使杠杆转
动的力
阻碍杠杆
转动的力
支点到动力作用线
的垂直距离
支点到阻力作用线
的垂直距离
F1动力
2. 杠杆五要素
(1)支 点(O):杠杆绕着转动的点
(2)动 力(F1):促使杠杆转动的力
(3)阻 力(F2):阻碍杠杆转动的力
(4)动力臂(l1):从支点到动力作用线的垂直距离
(5)阻力臂(l2):从支点到阻力作用线的垂直距离
( 力的作用线:过力的作用点,沿力的方向的直线 )
杠杆是一种常用的简单机械,由以下五个要素组成:
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,定力臂
看图思考
为什么体重不同的两人能让跷跷板水平静止?
在杠杆的使用中,杠杠的平衡状态是一种非常重要的状态。
杠杆满足什么条件时才会平衡呢?下面我们一起探究。
为什么体重相同的两人不能让跷跷板水平静止?
知识点二:探究杠杆的平衡条件
实验:探究杠杆的平衡条件
实验步骤
思考:怎么调?调到水平平衡的目的是什么?
(1)首先调节杠杆两端的螺母,使杠杆处于水平平衡状态。
调节方法:杠杆哪端高,就向哪端调节平衡螺母。
①保证力臂沿杠杆,便于测量;
②消除杠杆自身重力对实验结果的影响。
目的:
(2)杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
目的:保证力臂沿杠杆,便于测量力臂。
注意:此时不能再调平衡螺母
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再多做几次实验。
目的:避免结论的偶然性,
寻找杠杆平衡的普遍性规律。
次数 动力 F1 /N 动力臂 l1 /cm 阻力 F2 /N 阻力臂
l2 /cm
1 1 15 3 5
2 2 10 2 10
3 3 10 2 15
4 2 20 4 10
……
(4)将几次实验的动力F1、阻力F2、动力臂l1、阻力臂l2分别记录在表格中。
实验分析
杠杆平衡时,动力×动力臂=阻力×阻力臂。
注意:
这就是阿基米德
发现的杠杆原理。
杠杆平衡的条件:
(2)杠杆是否平衡,取决于力和力臂的乘积;
乘积相等就平衡;否则沿着乘积大的那端转动。
(1)应用公式计算时,单位要统一,即动力和阻力
的单位要用牛(N),动力臂和阻力臂的单位要相同。
实验结论
【例题】假如图中大人所受的重力大小为 750 N,小朋友所受的重力大小为250 N。当大人坐在离跷跷板的转轴0.5 m 处时,小朋友应该坐在哪里才能使跷跷板水平平衡?
杠杆平衡条件的计算
根据杠杆平衡的条件F1l1=F2l2 ,得
解:
l1
=
F2l2
F1
=
750N×0.5 m
250N
=1.5m
答:小朋友应该坐在离跷跷板的转轴1.5 m处。
F1
F2
动力臂l1
阻力臂l2
由 F1l1=F2l2
∵l1 >l2
∴F1< F2
动力臂大于阻力臂,动力小于阻力,是省力杠杆。
O
1.省力杠杆
知识点三:杠杆的分类及应用
在生活中,你还发现了哪些工具是省力杠杆,其作用是什么?
作用:可以省力,但费距离。
请注意观察,赛艇的船
桨在划水时,它的动力
臂和阻力臂,哪个更长
呢?我们在使用时,是
省力了还是费力了呢?
想想议议
由 F1l1=F2l2
∵l1 < l2
∴F1 > F2
动力臂小于阻力臂,动力大于阻力,是费力杠杆。
2.费力杠杆
作用:使用费力杠杆,虽然费了力,但省了动力作用点移动的距离。
动力臂等于阻力臂,动力等于阻力,是等臂杠杆。
托盘天平
物理天平
3.等臂杠杆
作用:既不省力,也不费力。
人体内许多部位的骨骼和肌肉组织也构成杠杆。如图所示,手上握着或托着重物时,可将手、手腕、尺骨和桡骨看作一个整体,并与肘关节(相当于支点)组成了杠杆。
人体内的杠杆
人的前臂工作示意图
杠杆的五要素:支点、动力、动力臂、阻力、阻力臂。
杠杆的定义:物理学中,把能绕某一固定点转动的硬棒(直棒或曲棒),叫做杠杆。
杠杆的平衡条件:动力 动力臂=阻力 阻力臂 (即:F1l1=F2l2)
杠杆
杠杆的分类及作用:省力杠杆、费力杠杆、等臂杠杆
课堂小结
1.如图是开瓶盖的起子,可以看成是一个杠杆,能正确表示出杠杆的支点、动力和阻力的图是( )
A B C D
C
课堂练习
2.如图所示的杠杆,动力F 的力臂是( )
A.OD B.OF
C.OA D.OC
D
3.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂( )个钩码。
A.1
B.2
C.3
D.4
C
同课章节目录