第九章机械和功练习题(含解析)2024-2025学年北师大版八年级下册物理(寒假预习练习题)
文档属性
| 名称 | 第九章机械和功练习题(含解析)2024-2025学年北师大版八年级下册物理(寒假预习练习题) | 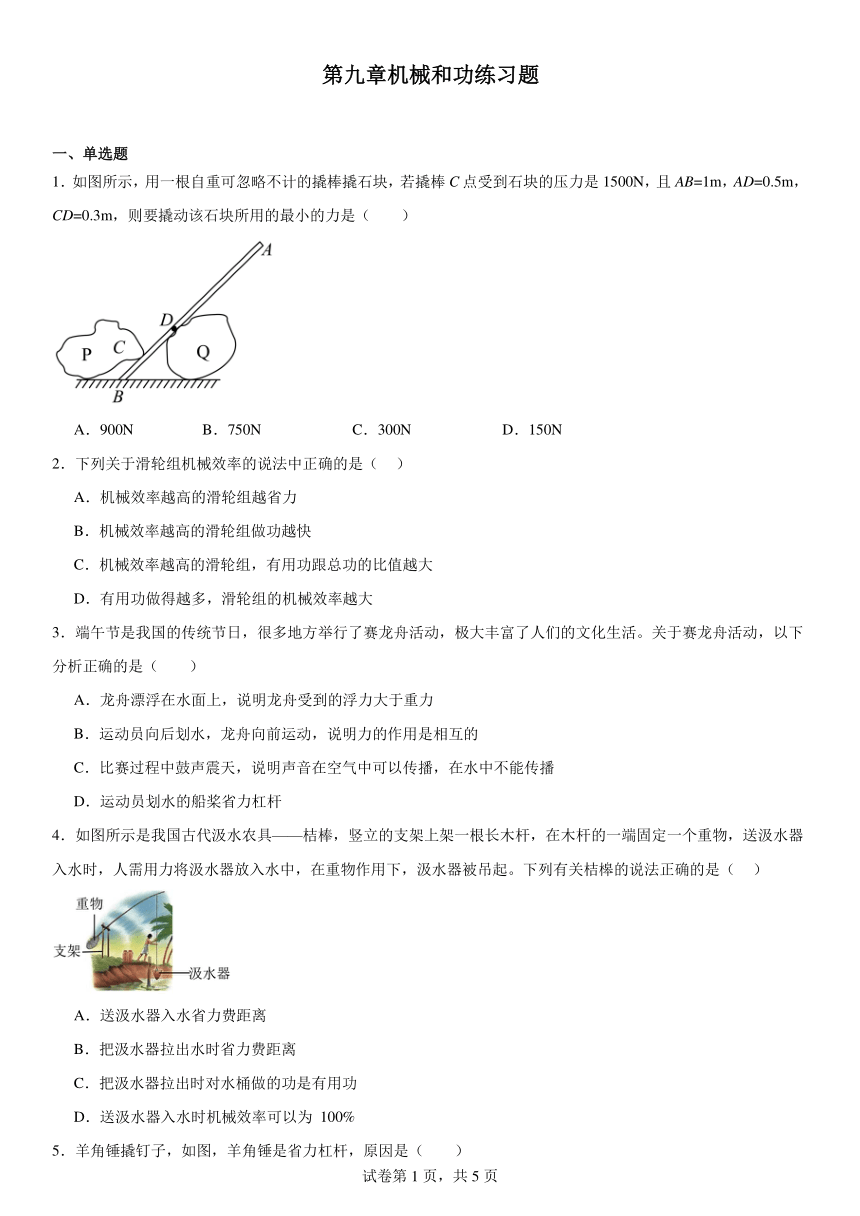 | |
| 格式 | docx | ||
| 文件大小 | 796.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 北师大版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-01-15 17:17:37 | ||
图片预览


文档简介
第九章机械和功练习题
一、单选题
1.如图所示,用一根自重可忽略不计的撬棒撬石块,若撬棒C点受到石块的压力是1500N,且AB=1m,AD=0.5m,CD=0.3m,则要撬动该石块所用的最小的力是( )
A.900N B.750N C.300N D.150N
2.下列关于滑轮组机械效率的说法中正确的是( )
A.机械效率越高的滑轮组越省力
B.机械效率越高的滑轮组做功越快
C.机械效率越高的滑轮组,有用功跟总功的比值越大
D.有用功做得越多,滑轮组的机械效率越大
3.端午节是我国的传统节日,很多地方举行了赛龙舟活动,极大丰富了人们的文化生活。关于赛龙舟活动,以下分析正确的是( )
A.龙舟漂浮在水面上,说明龙舟受到的浮力大于重力
B.运动员向后划水,龙舟向前运动,说明力的作用是相互的
C.比赛过程中鼓声震天,说明声音在空气中可以传播,在水中不能传播
D.运动员划水的船桨省力杠杆
4.如图所示是我国古代汲水农具——桔棒,竖立的支架上架一根长木杆,在木杆的一端固定一个重物,送汲水器入水时,人需用力将汲水器放入水中,在重物作用下,汲水器被吊起。下列有关桔槔的说法正确的是( )
A.送汲水器入水省力费距离
B.把汲水器拉出水时省力费距离
C.把汲水器拉出时对水桶做的功是有用功
D.送汲水器入水时机械效率可以为 100%
5.羊角锤撬钉子,如图,羊角锤是省力杠杆,原因是( )
A.动力臂小于阻力臂 B.动力臂大于阻力臂
C.动力×动力臂<阻力×阻力臂 D.动力×动力臂>阻力×阻力臂
6.下列属于费力杠杆的是( )
A.A B.B C.C D.D
7.如图,斜面高2m、长4m,小明用F=250N的平行于斜面的拉力,将重400N的物体从斜面底端拉到顶端,此过程物体受到的摩擦力为f,下列说法中正确的( )
A.摩擦力为250N B.总功为1600J
C.额外功为200J D.机械效率为60%
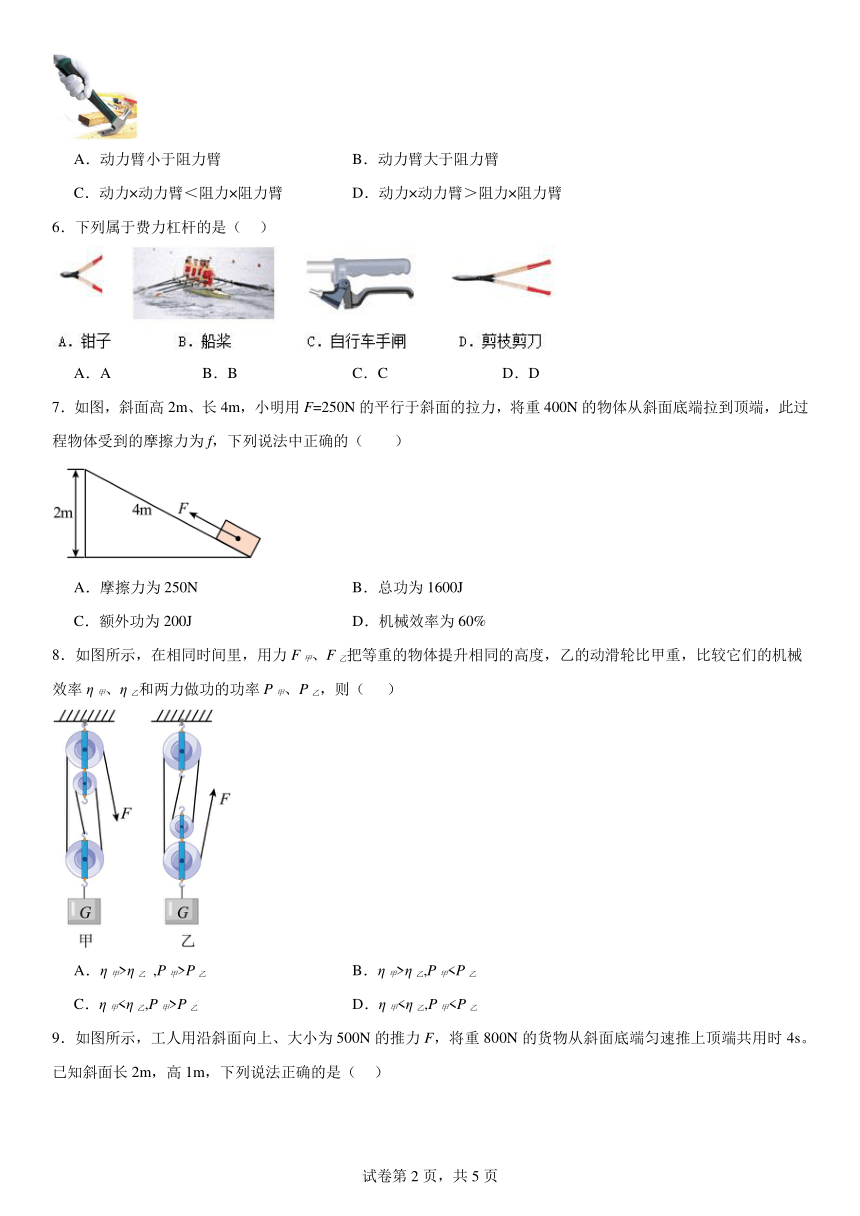
8.如图所示,在相同时间里,用力F甲、F乙把等重的物体提升相同的高度,乙的动滑轮比甲重,比较它们的机械效率η甲、η乙和两力做功的功率P甲、P乙,则( )
A.η甲>η乙 ,P甲>P乙 B.η甲>η乙,P甲C.η甲<η乙,P甲>P乙 D.η甲<η乙,P甲9.如图所示,工人用沿斜面向上、大小为500N的推力F,将重800N的货物从斜面底端匀速推上顶端共用时4s。已知斜面长2m,高1m,下列说法正确的是( )
A.货物受到的斜面的摩擦力方向沿斜面向上
B.推力F做功的功率为200W
C.整个过程的有用功是500J
D.此斜面的机械效率为80%
二、填空题
10.如图所示,在10N的水平拉力F作用下,重100N的物体A沿水平地面以2m/s的速度做匀速直线运动。则物体与地面间滑动摩擦力为 N,拉力F做功的功率为 W。
11.如图所示,水平地面上的一物体,受到方向不变的水平推力F的作用,F的大小与时间t的关系如图甲所示,物体的速度v与时间t的关系如图乙所示。则0~2s物体受到的阻力为 N,4~6s内推力F对物体所做的功为 J,功率为 W。
12.如图所示,小花用10N的水平推力推动重为80N的超市购物车,30s内沿水平方向前进了15m,在此过程中,购物车所受重力对购物车做功为 J,小花对购物车做功为 J,小花对购物车做功的功率为 W。
13.如图所示,起重机以1m/s的速度将重1500N的货物匀速提升4s,穿过滑轮的钢丝绳中拉力为500N,则此过程中,有用功为 J,起重机的机械效率为 %,拉力的功率为 W;若改用2m/s的速度提升重物,则该起重机的机械效率将 (选填“变大”、“变小”或“不变”)。
14.小明提着3kg的菜篮从一楼匀速爬上四楼用时1min,每层楼高3m,已知小明体重为50kg,小明做功至少为 J,他上楼的功率 W,则他在上楼过程中对菜篮所做的功为 J(g取10N/kg)。
15.如图所示,当我们使用开瓶器打开瓶盖时,可以把它看作是一个杠杆,这个杠杆的支点在点 处(选填“A”或“B”) 。 若此杠杆的动力臂是阻力臂的5倍,则此杠杆所需要施加的动力是阻力的 倍;由此可知,开瓶器是一个 杠杆。
三、实验题
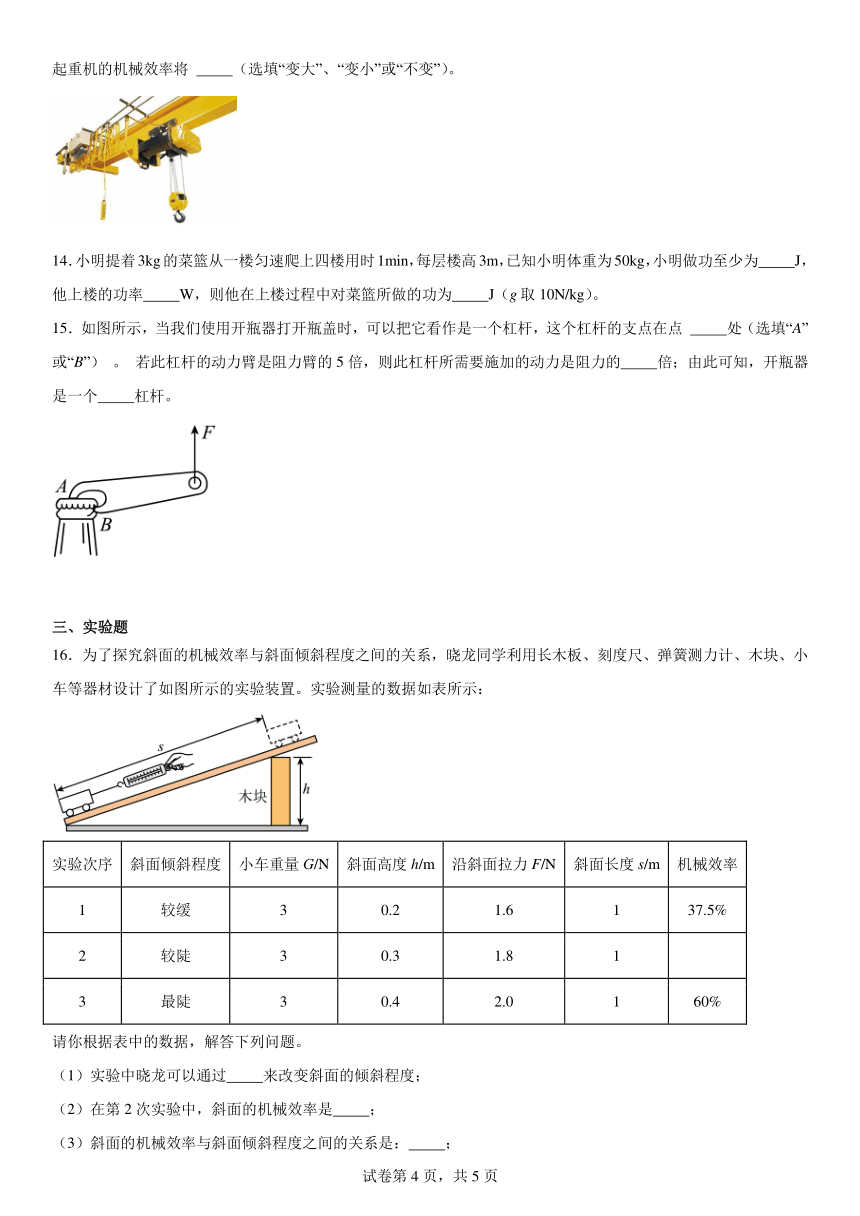
16.为了探究斜面的机械效率与斜面倾斜程度之间的关系,晓龙同学利用长木板、刻度尺、弹簧测力计、木块、小车等器材设计了如图所示的实验装置。实验测量的数据如表所示:
实验次序 斜面倾斜程度 小车重量G/N 斜面高度h/m 沿斜面拉力F/N 斜面长度s/m 机械效率
1 较缓 3 0.2 1.6 1 37.5%
2 较陡 3 0.3 1.8 1
3 最陡 3 0.4 2.0 1 60%
请你根据表中的数据,解答下列问题。
(1)实验中晓龙可以通过 来改变斜面的倾斜程度;
(2)在第2次实验中,斜面的机械效率是 ;
(3)斜面的机械效率与斜面倾斜程度之间的关系是: ;
(4)实验中还发现,斜面材料相同时,斜面越陡越 (选填“省力”或“费力”);
(5)斜面的机械效率还可能与 有关。为了通过实验验证你的猜想,还需要补充的器材是 。
17.在探究“杠杆平衡条件的实验”中(杠杆上每格等距,每个钩码的质量相等)。
(1)杠杆的平衡状态包括杠杆处于静止状态或匀速转动状态。而在实验中我们为了便于实验的操作,都是让杠杆处于 状态下进行实验的;
(2)如图甲所示,在右侧离支点O第2格挂两个钩码,只需在左侧离支点O第4格处挂 个钩码,即可使杠杆在水平位置平衡;
(3)实验中,有同学用图乙的方式悬挂钩码来进行探究杠杆平衡条件的实验,但老师建议同学不宜采用这种方式,该种方式的不足之处是 (填字母)。
A.一个人无法独立操作 B.力臂与杠杆不重合
C.力和力臂数目过多,不易得出结论 D.杠杆受力不平衡
四、计算题
18.某款消毒机器人,可在无人控制的情况下,对需要消毒的场所进行智能消毒。消毒完毕后,关闭喷洒装置并使机器人在水平地面上沿直线返回。此过程中,牵引力F随时间t的变化图象如图甲所示,消毒机器人前进的速度v的大小随时间t的变化图象如图乙所示,在1s~6s内机器人通过的距离为3.5m,则:
(1)求在0~6s的时间内,机器人运动的平均速度;(精确到0.01)
(2)求机器人在运动的过程中受到的阻力大小;
(3)求在3s~5s内,牵引力所做的功;
(4)求该机器人在匀速直线运动时,牵引力做功的功率。
试卷第1页,共3页
试卷第1页,共3页
1.C
【详解】由题意可知,杠杆C点受到石块的压力为F压=1500N,为杠杆阻力,方向垂直于杠杆向下,由杠杆原理可知,要使得动力最小,则对应的动力臂l1应尽量大,而阻力臂l2应尽量小,当支点为B点时,此时BC=0.2m为对应的阻力臂l2,AB=1m为对应的动力臂l1,此时动力臂最大,故由杠杆原理有
解得动力为
故要撬动该石块所用的最小的力为300N,故ABD不符合题意,C符合题意。
故选C。
2.C
【详解】AC.机械效率是指有用功与总功的比值,机械效率高说明有用功与总功的比值大,不能说明滑轮组越省力,故A错误,C正确;
B.功率是表示机械做功快慢的物理量,机械效率高做功不一定快,故B错误;
D.有用功做的多,有用功与总功的比值不一定大,滑轮组的机械效率不一定越大,故D错误。
故选C。
3.B
【详解】A.龙舟漂浮在水面上时,处于平衡状态,龙舟所受的浮力等于重力,故A错误;
B.运动员向后划水,给了水一个向后的作用力,同时也受到水向前的反作用力,龙舟前进,说明物体间力的作用是相互的,故B正确;
C.比赛过程中鼓声振天,说明声音在空气中可以传播,但不能确定水中的传播情况,故C错误;
D.在划桨时,手移动很小的距离,船桨就能移动很大的距离,因此船桨的动力臂小于阻力臂,是费力杠杆,故D错误。
故选B。
4.A
【详解】A.当人将提水的容器往下压,人对桔槔施加的力为动力,重物对桔槔施加的力为阻力,此时动力臂大于阻力臂,桔槔相当于一个省力杠杆,省力费距离,故A正确;
B.把汲水器拉出水时,重物对桔槔施加的力为动力,动力臂小于阻力臂,是费力杠杆,费力省距离,故B错误;
C.把汲水器拉出时,水做的功是有用功,水桶做的功是额外功,故C错误;
D.机械都有损耗,任何机械的效率都不可能是100%,故D错误。
故选A。
5.B
【详解】用羊角锤撬钉子时,动力臂大于阻力臂,由杠杆的平衡条件F1L1=F2L2可知,动力小于阻力,是省力杠杆,故ACD不符合题意,B符合题意。
故选B。
6.B
【详解】试题分析:杠杆根据动力臂与阻力臂的大小关系分为省力杠杆、费力杠杆和等臂杠杆,动力臂小于阻力臂的杠杆属于费力杠杆,图示中只有船桨的动力臂小于阻力臂,故应选B.
【考点定位】杠杆的分类
7.C
【详解】ABC.小明做的有用功
W有=Gh=400N×2m=800J
小明做的总功
W总=Fs=250N×4m=1000J
小明做的额外功
W额=W总﹣W有用=1000J﹣800J=200J
物体与斜面间的摩擦力
故AB错误,C正确;
D.斜面的机械效率为
故D错误。
故选C。
8.B
【详解】由题知,用力F甲、F乙把等重的物体提升相同的高度,所以两力做的有用功相同;但乙的动滑轮比甲重,所以乙的额外功大,因为总功等于有用功加上额外功,所以乙做的总功多,根据效率公式可知η甲>η乙;又因为做功时间相同,所以根据可知P甲<P乙。故B符合题意,ACD不符合题意。
故选B。
9.D
【详解】A.货物沿斜面向上运动,货物受到斜面的摩擦力的方向,沿斜面向下,故A错误;
B.推力做的总功
W总=Fs=500N×2m=1000J
推力做功的功率
故B错误;
C.克服货物重力做的有用功
W有=Gh=800N×1m=800J
故C错误;
D.斜面的机械效率
故D正确。
故选D。
10. 5 10
【详解】[1]对滑轮分析,其受到了向左的两段绳子的拉力,和向右的拉力F,由于匀速,故一段绳子的拉力大小为5N,对A进行受力分析,其受到了拉力,和向左的摩擦力,由于是匀速,故处于平衡状态,摩擦力的大小为5N。
[2]由于物体A以2m/s的速度运动,那么拉力F的运动的速度为1m/s,那么拉力F做功的功率为
故拉力F做功的功率为10W。
11. 1 16 8
【详解】[1]由F﹣t图像可知,0~2s内的推力F=1N,由v﹣t图像可知,物体速度为0,处于静止状态,则物体受到的阻力和推力是一对平衡力,二力大小相等,则此时物体受到的阻力为1N。
[2][3]由F﹣t图像可知,4s~6s内的推力F′=2N,由v﹣t图像可知,物体以v=4m/s的速度做匀速直线运动,处于平衡状态,4~6s内推力F对物体所做的功率
P=F′v=2N×4m/s=8W
所做的功
W=Pt=8W×2s=16J
12. 0 150 5
【详解】[1]因在重力方向上没有移动距离,故购物车所受重力对购物车做功为 0J。
[2][3]小花对购物车做功为
小花对购物车做功的功率为
13. 6000 75 2000 不变
【详解】[1]物体上升的高度为
h=vt=1m/s×4s=4m
克服物体重力做的有用功为
W有=Gh=1500N×4m=6000J
[2]由图可知,承担绳子的股数n=4,则绳子自由端移动的距离为
s=nh=4h=4×4m=16m
总功为
W总=Fs=500N×16m=8000J
则起重机的机械效率为
[3]拉力的功率为
[4]由于滑轮组的机械效率与提升物体的速度无关,因此若改用2m/s的速度提升重物,则该起重机的机械效率不变。
14. 4770 79.5 270
【详解】[1][2]小明上楼做功包括克服自己重力做功和克服菜篮重力做功,故
功率
[3]上楼过程中对菜篮所做的功为
15. A 0.2 省力
【详解】[1]该杠杆在使用时绕点A转动,则杠杆的支点为点A。
[2]根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,若此杠杆的动力臂是阻力臂的5倍,则此杠杆所需要施加的动力是阻力的0.2倍。
[3]由于动力小于阻力,说明该杠杆是省力杠杆。
16. 移动木块 50% 斜面的倾斜程度越大,斜面的机械效率越高 费力 斜面的粗糙程度 粗糙程度不同的斜面
【解析】略
17.(1)水平静止
(2)1
(3)C
【详解】(1)杠杆的平衡状态是指杠杆处于静止或匀速转动状态;为了消除杠杆自身的重力对杠杆平衡的影响,让杠杆的重心通过支点,所以使杠杆在水平位置平衡,杠杆自身的重力对杠杆平衡没有影响;力臂在杠杆上,便于直接从杠杆上测量力臂。
(2)设每个钩码的重力为G,每格的长度为L,根据杠杆平衡条件,则
即需在左侧离支点O第4格处挂1个钩码。
(3)实验中,如图乙所示的方式悬挂钩码,杠杆平衡是杠杆的左侧在多个力共同作用的结果,采用这种方式是不妥当的,这主要是因为杠杆的力和力臂数目过多,故C符合题意,ABD不符合题意。
故选C。
18.(1)0.58m/s
(2)200N
(3)400J
(4)200W
【详解】(1)由图乙可知,0~1s,机器人的速度为0,因此处于静止状态,1s~6s内机器人通过的距离为3.5m,则机器人在0~6s的时间内运动的平均速度
(2)由题图乙可知机器人在3s~5s内做匀速直线运动,由题图甲可知此过程中机器人的牵引力F=200N,由二力平衡条件可知,机器人受到的阻力
(3)由可知,在3s~5s内,机器人运动的距离
则牵引力所做的功
(4)由图乙可知,该机器人在3s~5s内做匀速直线运动,所以该机器人在匀速直线运动时,牵引力做功的功率
答案第1页,共2页
答案第1页,共2页
一、单选题
1.如图所示,用一根自重可忽略不计的撬棒撬石块,若撬棒C点受到石块的压力是1500N,且AB=1m,AD=0.5m,CD=0.3m,则要撬动该石块所用的最小的力是( )
A.900N B.750N C.300N D.150N
2.下列关于滑轮组机械效率的说法中正确的是( )
A.机械效率越高的滑轮组越省力
B.机械效率越高的滑轮组做功越快
C.机械效率越高的滑轮组,有用功跟总功的比值越大
D.有用功做得越多,滑轮组的机械效率越大
3.端午节是我国的传统节日,很多地方举行了赛龙舟活动,极大丰富了人们的文化生活。关于赛龙舟活动,以下分析正确的是( )
A.龙舟漂浮在水面上,说明龙舟受到的浮力大于重力
B.运动员向后划水,龙舟向前运动,说明力的作用是相互的
C.比赛过程中鼓声震天,说明声音在空气中可以传播,在水中不能传播
D.运动员划水的船桨省力杠杆
4.如图所示是我国古代汲水农具——桔棒,竖立的支架上架一根长木杆,在木杆的一端固定一个重物,送汲水器入水时,人需用力将汲水器放入水中,在重物作用下,汲水器被吊起。下列有关桔槔的说法正确的是( )
A.送汲水器入水省力费距离
B.把汲水器拉出水时省力费距离
C.把汲水器拉出时对水桶做的功是有用功
D.送汲水器入水时机械效率可以为 100%
5.羊角锤撬钉子,如图,羊角锤是省力杠杆,原因是( )
A.动力臂小于阻力臂 B.动力臂大于阻力臂
C.动力×动力臂<阻力×阻力臂 D.动力×动力臂>阻力×阻力臂
6.下列属于费力杠杆的是( )
A.A B.B C.C D.D
7.如图,斜面高2m、长4m,小明用F=250N的平行于斜面的拉力,将重400N的物体从斜面底端拉到顶端,此过程物体受到的摩擦力为f,下列说法中正确的( )
A.摩擦力为250N B.总功为1600J
C.额外功为200J D.机械效率为60%
8.如图所示,在相同时间里,用力F甲、F乙把等重的物体提升相同的高度,乙的动滑轮比甲重,比较它们的机械效率η甲、η乙和两力做功的功率P甲、P乙,则( )
A.η甲>η乙 ,P甲>P乙 B.η甲>η乙,P甲
A.货物受到的斜面的摩擦力方向沿斜面向上
B.推力F做功的功率为200W
C.整个过程的有用功是500J
D.此斜面的机械效率为80%
二、填空题
10.如图所示,在10N的水平拉力F作用下,重100N的物体A沿水平地面以2m/s的速度做匀速直线运动。则物体与地面间滑动摩擦力为 N,拉力F做功的功率为 W。
11.如图所示,水平地面上的一物体,受到方向不变的水平推力F的作用,F的大小与时间t的关系如图甲所示,物体的速度v与时间t的关系如图乙所示。则0~2s物体受到的阻力为 N,4~6s内推力F对物体所做的功为 J,功率为 W。
12.如图所示,小花用10N的水平推力推动重为80N的超市购物车,30s内沿水平方向前进了15m,在此过程中,购物车所受重力对购物车做功为 J,小花对购物车做功为 J,小花对购物车做功的功率为 W。
13.如图所示,起重机以1m/s的速度将重1500N的货物匀速提升4s,穿过滑轮的钢丝绳中拉力为500N,则此过程中,有用功为 J,起重机的机械效率为 %,拉力的功率为 W;若改用2m/s的速度提升重物,则该起重机的机械效率将 (选填“变大”、“变小”或“不变”)。
14.小明提着3kg的菜篮从一楼匀速爬上四楼用时1min,每层楼高3m,已知小明体重为50kg,小明做功至少为 J,他上楼的功率 W,则他在上楼过程中对菜篮所做的功为 J(g取10N/kg)。
15.如图所示,当我们使用开瓶器打开瓶盖时,可以把它看作是一个杠杆,这个杠杆的支点在点 处(选填“A”或“B”) 。 若此杠杆的动力臂是阻力臂的5倍,则此杠杆所需要施加的动力是阻力的 倍;由此可知,开瓶器是一个 杠杆。
三、实验题
16.为了探究斜面的机械效率与斜面倾斜程度之间的关系,晓龙同学利用长木板、刻度尺、弹簧测力计、木块、小车等器材设计了如图所示的实验装置。实验测量的数据如表所示:
实验次序 斜面倾斜程度 小车重量G/N 斜面高度h/m 沿斜面拉力F/N 斜面长度s/m 机械效率
1 较缓 3 0.2 1.6 1 37.5%
2 较陡 3 0.3 1.8 1
3 最陡 3 0.4 2.0 1 60%
请你根据表中的数据,解答下列问题。
(1)实验中晓龙可以通过 来改变斜面的倾斜程度;
(2)在第2次实验中,斜面的机械效率是 ;
(3)斜面的机械效率与斜面倾斜程度之间的关系是: ;
(4)实验中还发现,斜面材料相同时,斜面越陡越 (选填“省力”或“费力”);
(5)斜面的机械效率还可能与 有关。为了通过实验验证你的猜想,还需要补充的器材是 。
17.在探究“杠杆平衡条件的实验”中(杠杆上每格等距,每个钩码的质量相等)。
(1)杠杆的平衡状态包括杠杆处于静止状态或匀速转动状态。而在实验中我们为了便于实验的操作,都是让杠杆处于 状态下进行实验的;
(2)如图甲所示,在右侧离支点O第2格挂两个钩码,只需在左侧离支点O第4格处挂 个钩码,即可使杠杆在水平位置平衡;
(3)实验中,有同学用图乙的方式悬挂钩码来进行探究杠杆平衡条件的实验,但老师建议同学不宜采用这种方式,该种方式的不足之处是 (填字母)。
A.一个人无法独立操作 B.力臂与杠杆不重合
C.力和力臂数目过多,不易得出结论 D.杠杆受力不平衡
四、计算题
18.某款消毒机器人,可在无人控制的情况下,对需要消毒的场所进行智能消毒。消毒完毕后,关闭喷洒装置并使机器人在水平地面上沿直线返回。此过程中,牵引力F随时间t的变化图象如图甲所示,消毒机器人前进的速度v的大小随时间t的变化图象如图乙所示,在1s~6s内机器人通过的距离为3.5m,则:
(1)求在0~6s的时间内,机器人运动的平均速度;(精确到0.01)
(2)求机器人在运动的过程中受到的阻力大小;
(3)求在3s~5s内,牵引力所做的功;
(4)求该机器人在匀速直线运动时,牵引力做功的功率。
试卷第1页,共3页
试卷第1页,共3页
1.C
【详解】由题意可知,杠杆C点受到石块的压力为F压=1500N,为杠杆阻力,方向垂直于杠杆向下,由杠杆原理可知,要使得动力最小,则对应的动力臂l1应尽量大,而阻力臂l2应尽量小,当支点为B点时,此时BC=0.2m为对应的阻力臂l2,AB=1m为对应的动力臂l1,此时动力臂最大,故由杠杆原理有
解得动力为
故要撬动该石块所用的最小的力为300N,故ABD不符合题意,C符合题意。
故选C。
2.C
【详解】AC.机械效率是指有用功与总功的比值,机械效率高说明有用功与总功的比值大,不能说明滑轮组越省力,故A错误,C正确;
B.功率是表示机械做功快慢的物理量,机械效率高做功不一定快,故B错误;
D.有用功做的多,有用功与总功的比值不一定大,滑轮组的机械效率不一定越大,故D错误。
故选C。
3.B
【详解】A.龙舟漂浮在水面上时,处于平衡状态,龙舟所受的浮力等于重力,故A错误;
B.运动员向后划水,给了水一个向后的作用力,同时也受到水向前的反作用力,龙舟前进,说明物体间力的作用是相互的,故B正确;
C.比赛过程中鼓声振天,说明声音在空气中可以传播,但不能确定水中的传播情况,故C错误;
D.在划桨时,手移动很小的距离,船桨就能移动很大的距离,因此船桨的动力臂小于阻力臂,是费力杠杆,故D错误。
故选B。
4.A
【详解】A.当人将提水的容器往下压,人对桔槔施加的力为动力,重物对桔槔施加的力为阻力,此时动力臂大于阻力臂,桔槔相当于一个省力杠杆,省力费距离,故A正确;
B.把汲水器拉出水时,重物对桔槔施加的力为动力,动力臂小于阻力臂,是费力杠杆,费力省距离,故B错误;
C.把汲水器拉出时,水做的功是有用功,水桶做的功是额外功,故C错误;
D.机械都有损耗,任何机械的效率都不可能是100%,故D错误。
故选A。
5.B
【详解】用羊角锤撬钉子时,动力臂大于阻力臂,由杠杆的平衡条件F1L1=F2L2可知,动力小于阻力,是省力杠杆,故ACD不符合题意,B符合题意。
故选B。
6.B
【详解】试题分析:杠杆根据动力臂与阻力臂的大小关系分为省力杠杆、费力杠杆和等臂杠杆,动力臂小于阻力臂的杠杆属于费力杠杆,图示中只有船桨的动力臂小于阻力臂,故应选B.
【考点定位】杠杆的分类
7.C
【详解】ABC.小明做的有用功
W有=Gh=400N×2m=800J
小明做的总功
W总=Fs=250N×4m=1000J
小明做的额外功
W额=W总﹣W有用=1000J﹣800J=200J
物体与斜面间的摩擦力
故AB错误,C正确;
D.斜面的机械效率为
故D错误。
故选C。
8.B
【详解】由题知,用力F甲、F乙把等重的物体提升相同的高度,所以两力做的有用功相同;但乙的动滑轮比甲重,所以乙的额外功大,因为总功等于有用功加上额外功,所以乙做的总功多,根据效率公式可知η甲>η乙;又因为做功时间相同,所以根据可知P甲<P乙。故B符合题意,ACD不符合题意。
故选B。
9.D
【详解】A.货物沿斜面向上运动,货物受到斜面的摩擦力的方向,沿斜面向下,故A错误;
B.推力做的总功
W总=Fs=500N×2m=1000J
推力做功的功率
故B错误;
C.克服货物重力做的有用功
W有=Gh=800N×1m=800J
故C错误;
D.斜面的机械效率
故D正确。
故选D。
10. 5 10
【详解】[1]对滑轮分析,其受到了向左的两段绳子的拉力,和向右的拉力F,由于匀速,故一段绳子的拉力大小为5N,对A进行受力分析,其受到了拉力,和向左的摩擦力,由于是匀速,故处于平衡状态,摩擦力的大小为5N。
[2]由于物体A以2m/s的速度运动,那么拉力F的运动的速度为1m/s,那么拉力F做功的功率为
故拉力F做功的功率为10W。
11. 1 16 8
【详解】[1]由F﹣t图像可知,0~2s内的推力F=1N,由v﹣t图像可知,物体速度为0,处于静止状态,则物体受到的阻力和推力是一对平衡力,二力大小相等,则此时物体受到的阻力为1N。
[2][3]由F﹣t图像可知,4s~6s内的推力F′=2N,由v﹣t图像可知,物体以v=4m/s的速度做匀速直线运动,处于平衡状态,4~6s内推力F对物体所做的功率
P=F′v=2N×4m/s=8W
所做的功
W=Pt=8W×2s=16J
12. 0 150 5
【详解】[1]因在重力方向上没有移动距离,故购物车所受重力对购物车做功为 0J。
[2][3]小花对购物车做功为
小花对购物车做功的功率为
13. 6000 75 2000 不变
【详解】[1]物体上升的高度为
h=vt=1m/s×4s=4m
克服物体重力做的有用功为
W有=Gh=1500N×4m=6000J
[2]由图可知,承担绳子的股数n=4,则绳子自由端移动的距离为
s=nh=4h=4×4m=16m
总功为
W总=Fs=500N×16m=8000J
则起重机的机械效率为
[3]拉力的功率为
[4]由于滑轮组的机械效率与提升物体的速度无关,因此若改用2m/s的速度提升重物,则该起重机的机械效率不变。
14. 4770 79.5 270
【详解】[1][2]小明上楼做功包括克服自己重力做功和克服菜篮重力做功,故
功率
[3]上楼过程中对菜篮所做的功为
15. A 0.2 省力
【详解】[1]该杠杆在使用时绕点A转动,则杠杆的支点为点A。
[2]根据杠杆平衡条件,动力×动力臂=阻力×阻力臂,若此杠杆的动力臂是阻力臂的5倍,则此杠杆所需要施加的动力是阻力的0.2倍。
[3]由于动力小于阻力,说明该杠杆是省力杠杆。
16. 移动木块 50% 斜面的倾斜程度越大,斜面的机械效率越高 费力 斜面的粗糙程度 粗糙程度不同的斜面
【解析】略
17.(1)水平静止
(2)1
(3)C
【详解】(1)杠杆的平衡状态是指杠杆处于静止或匀速转动状态;为了消除杠杆自身的重力对杠杆平衡的影响,让杠杆的重心通过支点,所以使杠杆在水平位置平衡,杠杆自身的重力对杠杆平衡没有影响;力臂在杠杆上,便于直接从杠杆上测量力臂。
(2)设每个钩码的重力为G,每格的长度为L,根据杠杆平衡条件,则
即需在左侧离支点O第4格处挂1个钩码。
(3)实验中,如图乙所示的方式悬挂钩码,杠杆平衡是杠杆的左侧在多个力共同作用的结果,采用这种方式是不妥当的,这主要是因为杠杆的力和力臂数目过多,故C符合题意,ABD不符合题意。
故选C。
18.(1)0.58m/s
(2)200N
(3)400J
(4)200W
【详解】(1)由图乙可知,0~1s,机器人的速度为0,因此处于静止状态,1s~6s内机器人通过的距离为3.5m,则机器人在0~6s的时间内运动的平均速度
(2)由题图乙可知机器人在3s~5s内做匀速直线运动,由题图甲可知此过程中机器人的牵引力F=200N,由二力平衡条件可知,机器人受到的阻力
(3)由可知,在3s~5s内,机器人运动的距离
则牵引力所做的功
(4)由图乙可知,该机器人在3s~5s内做匀速直线运动,所以该机器人在匀速直线运动时,牵引力做功的功率
答案第1页,共2页
答案第1页,共2页
同课章节目录