2024-2025学年山东省滨州市高三(上)期末物理试卷(含解析)
文档属性
| 名称 | 2024-2025学年山东省滨州市高三(上)期末物理试卷(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 5.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-01-21 00:00:00 | ||
图片预览

文档简介
2024-2025学年山东省滨州市高三(上)期末物理试卷
一、单选题:本大题共8小题,共24分。
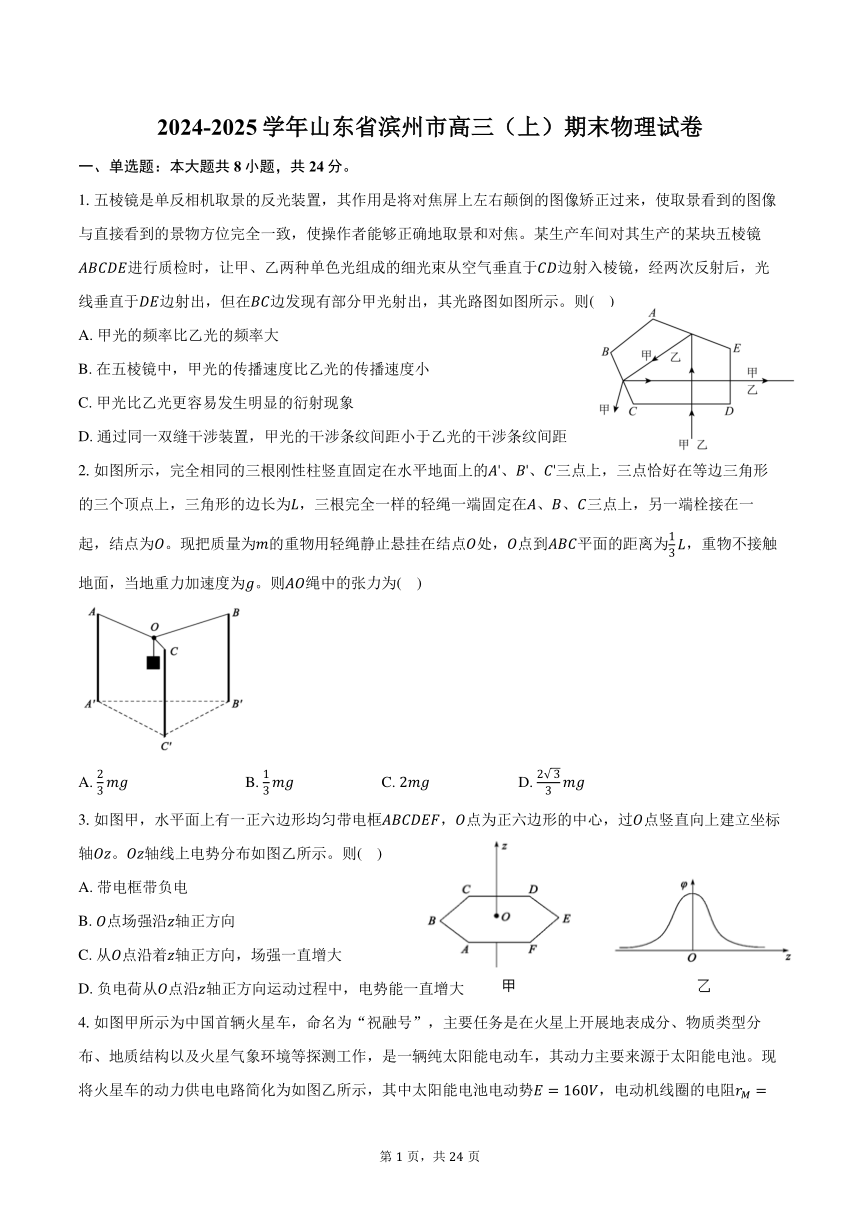
1.五棱镜是单反相机取景的反光装置,其作用是将对焦屏上左右颠倒的图像矫正过来,使取景看到的图像与直接看到的景物方位完全一致,使操作者能够正确地取景和对焦。某生产车间对其生产的某块五棱镜进行质检时,让甲、乙两种单色光组成的细光束从空气垂直于边射入棱镜,经两次反射后,光线垂直于边射出,但在边发现有部分甲光射出,其光路图如图所示。则( )
A. 甲光的频率比乙光的频率大
B. 在五棱镜中,甲光的传播速度比乙光的传播速度小
C. 甲光比乙光更容易发生明显的衍射现象
D. 通过同一双缝干涉装置,甲光的干涉条纹间距小于乙光的干涉条纹间距
2.如图所示,完全相同的三根刚性柱竖直固定在水平地面上的、、三点上,三点恰好在等边三角形的三个顶点上,三角形的边长为,三根完全一样的轻绳一端固定在、、三点上,另一端栓接在一起,结点为。现把质量为的重物用轻绳静止悬挂在结点处,点到平面的距离为,重物不接触地面,当地重力加速度为。则绳中的张力为( )
A. B. C. D.
3.如图甲,水平面上有一正六边形均匀带电框,点为正六边形的中心,过点竖直向上建立坐标轴。轴线上电势分布如图乙所示。则( )
A. 带电框带负电
B. 点场强沿轴正方向
C. 从点沿着轴正方向,场强一直增大
D. 负电荷从点沿轴正方向运动过程中,电势能一直增大
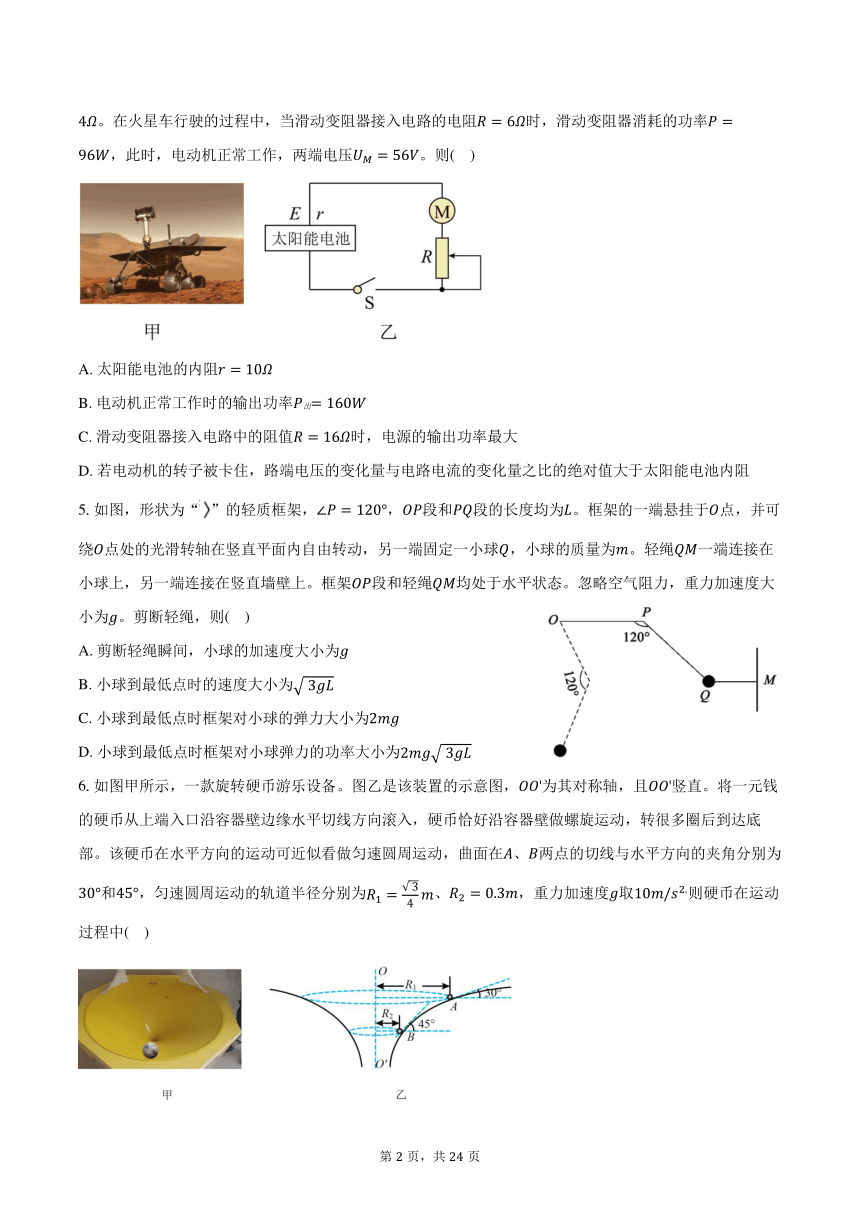
4.如图甲所示为中国首辆火星车,命名为“祝融号”,主要任务是在火星上开展地表成分、物质类型分布、地质结构以及火星气象环境等探测工作,是一辆纯太阳能电动车,其动力主要来源于太阳能电池。现将火星车的动力供电电路简化为如图乙所示,其中太阳能电池电动势,电动机线圈的电阻。在火星车行驶的过程中,当滑动变阻器接入电路的电阻时,滑动变阻器消耗的功率,此时,电动机正常工作,两端电压。则( )
A. 太阳能电池的内阻
B. 电动机正常工作时的输出功率出
C. 滑动变阻器接入电路中的阻值时,电源的输出功率最大
D. 若电动机的转子被卡住,路端电压的变化量与电路电流的变化量之比的绝对值大于太阳能电池内阻
5.如图,形状为“”的轻质框架,,段和段的长度均为。框架的一端悬挂于点,并可绕点处的光滑转轴在竖直平面内自由转动,另一端固定一小球,小球的质量为。轻绳一端连接在小球上,另一端连接在竖直墙壁上。框架段和轻绳均处于水平状态。忽略空气阻力,重力加速度大小为。剪断轻绳,则( )
A. 剪断轻绳瞬间,小球的加速度大小为
B. 小球到最低点时的速度大小为
C. 小球到最低点时框架对小球的弹力大小为
D. 小球到最低点时框架对小球弹力的功率大小为
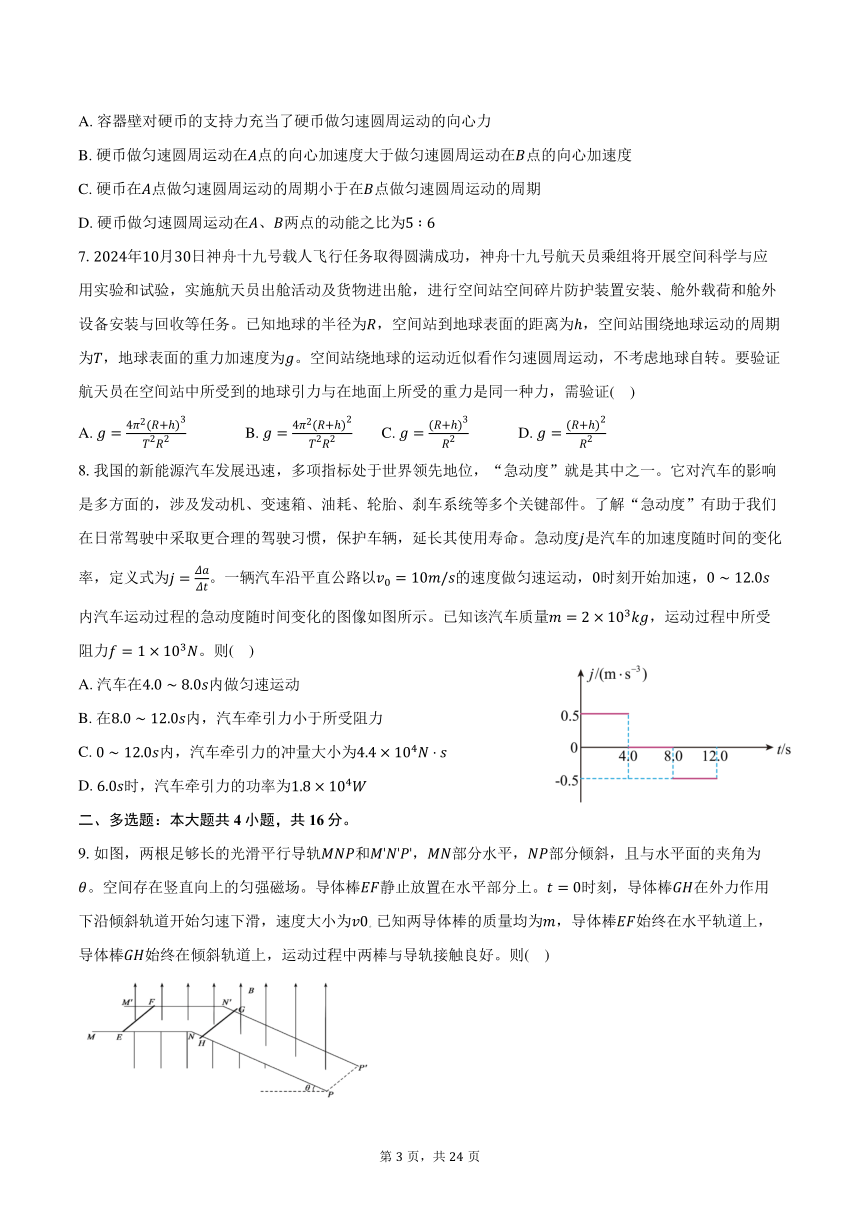
6.如图甲所示,一款旋转硬币游乐设备。图乙是该装置的示意图,为其对称轴,且竖直。将一元钱的硬币从上端入口沿容器壁边缘水平切线方向滚入,硬币恰好沿容器壁做螺旋运动,转很多圈后到达底部。该硬币在水平方向的运动可近似看做匀速圆周运动,曲面在、两点的切线与水平方向的夹角分别为和,匀速圆周运动的轨道半径分别为、,重力加速度取则硬币在运动过程中( )
A. 容器壁对硬币的支持力充当了硬币做匀速圆周运动的向心力
B. 硬币做匀速圆周运动在点的向心加速度大于做匀速圆周运动在点的向心加速度
C. 硬币在点做匀速圆周运动的周期小于在点做匀速圆周运动的周期
D. 硬币做匀速圆周运动在、两点的动能之比为
7.年月日神舟十九号载人飞行任务取得圆满成功,神舟十九号航天员乘组将开展空间科学与应用实验和试验,实施航天员出舱活动及货物进出舱,进行空间站空间碎片防护装置安装、舱外载荷和舱外设备安装与回收等任务。已知地球的半径为,空间站到地球表面的距离为,空间站围绕地球运动的周期为,地球表面的重力加速度为。空间站绕地球的运动近似看作匀速圆周运动,不考虑地球自转。要验证航天员在空间站中所受到的地球引力与在地面上所受的重力是同一种力,需验证( )
A. B. C. D.
8.我国的新能源汽车发展迅速,多项指标处于世界领先地位,“急动度”就是其中之一。它对汽车的影响是多方面的,涉及发动机、变速箱、油耗、轮胎、刹车系统等多个关键部件。了解“急动度”有助于我们在日常驾驶中采取更合理的驾驶习惯,保护车辆,延长其使用寿命。急动度是汽车的加速度随时间的变化率,定义式为。一辆汽车沿平直公路以的速度做匀速运动,时刻开始加速,内汽车运动过程的急动度随时间变化的图像如图所示。已知该汽车质量,运动过程中所受阻力。则( )
A. 汽车在内做匀速运动
B. 在内,汽车牵引力小于所受阻力
C. 内,汽车牵引力的冲量大小为
D. 时,汽车牵引力的功率为
二、多选题:本大题共4小题,共16分。
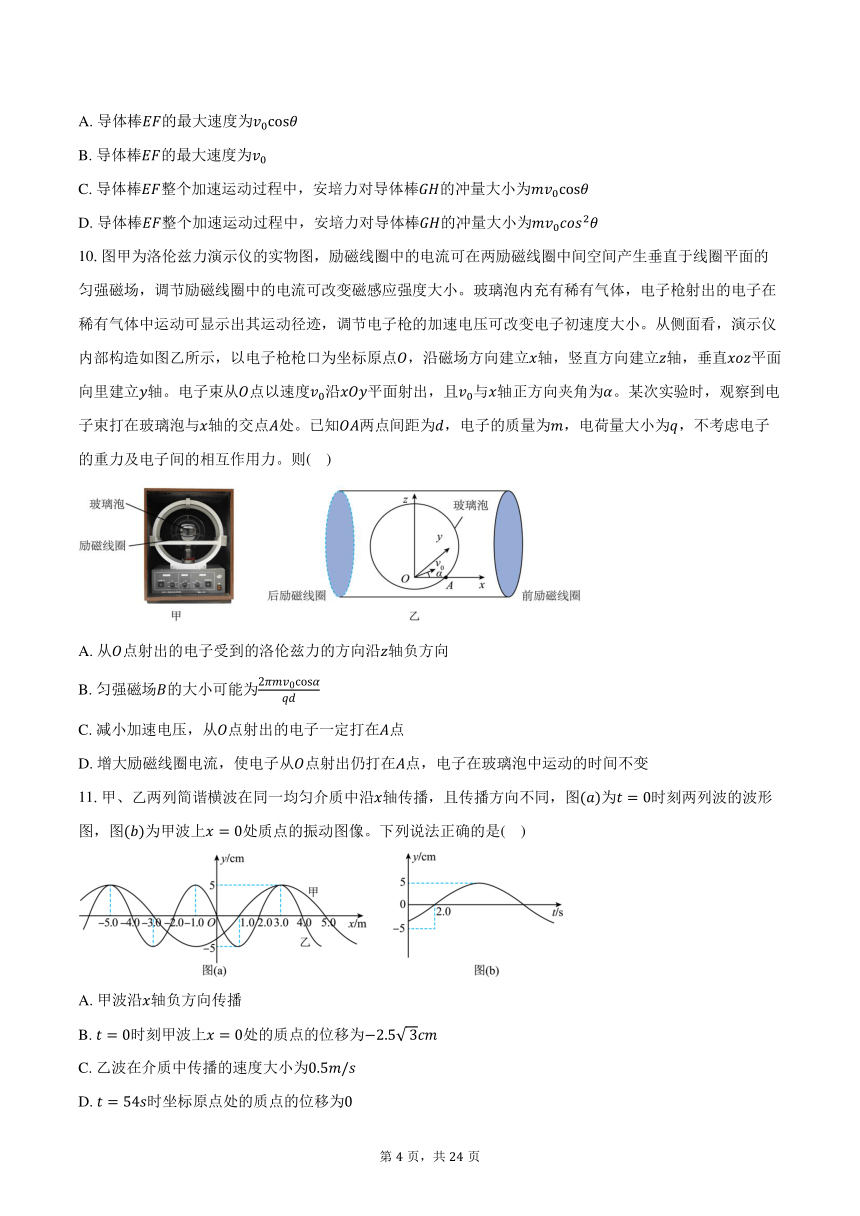
9.如图,两根足够长的光滑平行导轨和,部分水平,部分倾斜,且与水平面的夹角为。空间存在竖直向上的匀强磁场。导体棒静止放置在水平部分上。时刻,导体棒在外力作用下沿倾斜轨道开始匀速下滑,速度大小为。已知两导体棒的质量均为,导体棒始终在水平轨道上,导体棒始终在倾斜轨道上,运动过程中两棒与导轨接触良好。则( )
A. 导体棒的最大速度为
B. 导体棒的最大速度为
C. 导体棒整个加速运动过程中,安培力对导体棒的冲量大小为
D. 导体棒整个加速运动过程中,安培力对导体棒的冲量大小为
10.图甲为洛伦兹力演示仪的实物图,励磁线圈中的电流可在两励磁线圈中间空间产生垂直于线圈平面的匀强磁场,调节励磁线圈中的电流可改变磁感应强度大小。玻璃泡内充有稀有气体,电子枪射出的电子在稀有气体中运动可显示出其运动径迹,调节电子枪的加速电压可改变电子初速度大小。从侧面看,演示仪内部构造如图乙所示,以电子枪枪口为坐标原点,沿磁场方向建立轴,竖直方向建立轴,垂直平面向里建立轴。电子束从点以速度沿平面射出,且与轴正方向夹角为。某次实验时,观察到电子束打在玻璃泡与轴的交点处。已知两点间距为,电子的质量为,电荷量大小为,不考虑电子的重力及电子间的相互作用力。则( )
A. 从点射出的电子受到的洛伦兹力的方向沿轴负方向
B. 匀强磁场的大小可能为
C. 减小加速电压,从点射出的电子一定打在点
D. 增大励磁线圈电流,使电子从点射出仍打在点,电子在玻璃泡中运动的时间不变
11.甲、乙两列简谐横波在同一均匀介质中沿轴传播,且传播方向不同,图为时刻两列波的波形图,图为甲波上处质点的振动图像。下列说法正确的是( )
A. 甲波沿轴负方向传播
B. 时刻甲波上处的质点的位移为
C. 乙波在介质中传播的速度大小为
D. 时坐标原点处的质点的位移为
12.如图,水平地面上有一截面为正方形的建筑物,边长为。在地面上某一确定高度斜向上抛出一小球,要使小球恰好能够抛过该建筑物的初速度最小。空气阻力不计,重力加速度为,则小球运动过程中( )
A. 距地面最大高度为
B. 由于抛出点未知,故小球运动过程中距地面的最大高度不能确定
C. 小球在水平方向的分速度大小为
D. 小球在水平方向的分速度大小为
三、实验题:本大题共2小题,共14分。
13.某物理兴趣小组在课本验证动量守恒的碰撞实验的基础上进行了进一步探索。他们寻找并选用了表面近似看作光滑的玻璃圆弧轨道,选用两个大小相等、质量不等的刚性小球和,且,实验时,他们先让小球从光滑圆弧轨道上某一位置由静止释放,在轨道末端点水平抛出,最后落在搭在轨道末端点与地面间的固定斜面上,记下小球与斜面第一次碰撞留下的落点痕迹。再把被碰小球放在玻璃轨道末端,让入射小球从相同位置由静止释放,与被碰小球碰撞后都落到斜面上,并记录两次的落点痕迹。、、为从点向下三个落点的位置不考虑小球在斜面上的多次碰撞,斜面上点与各落点的距离分别为、、。
关于本实验,下列说法正确的是_____。
A.小球半径大小对实验结果没有影响
B.需要用量角器测量斜面倾斜角度
C.斜面倾角应适当大一些
小组同学猜测两小球的碰撞应该为弹性碰撞,则能说明两球碰撞前后总动量守恒的关系式为____用、、表示
若考虑玻璃圆弧轨道的阻力影响,碰后的系统总动量____碰前的系统总动量填“大于”、“小于”或“等于”。
14.某学习小组要描述某一电子元件的伏安特性曲线,实验室提供有下列器材:
多用电表;
灵敏电流计,内阻约为;
电压表,内阻约为;
滑动变阻器;
滑动变阻器;
两节干电池;
导线开关若干。
为了确定实验电路,先用欧姆表粗测电子元件的电阻,示数如图所示。根据提供的器材和测量的数据,电路图应该选图____填“”或者“”
滑动变阻器应该选取____选填“”或“”。
本实验测出的数据如下表所示,请在图中描绘出电子元件的伏安特性曲线。
根据所描绘的图线,得出该电子元件的阻值为____结果保留两位有效数字。
四、计算题:本大题共4小题,共46分。
15.玻璃微珠材料是用玻璃制成的微小球体材料,常在道路标志线、标志牌及衣服的反光条中使用,它能将车灯照射过来的光逆向返回,从而使得在夜间行车没有路灯的情况下,能看清道路和交通标志,增强车辆驾驶员和行人的可见度,提高安全性。用这种材料制成的某反光膜内均匀分布着单层细玻璃珠,如图甲所示,所用玻璃的折射率。一束平行光照射到玻璃微珠上时,部分光线经一次反射和两次折射后沿与入射方向相反的方向射回。
如图乙所示,除经过球心的光线外,还有入射光线能被反向平行射回,求该光线第一次进入玻璃微球的入射角多大?
要保证能有足够强度的光被“反向射回”,要求入射光与其“反向射回”的光之间的距离应不大于,则玻璃微球的直径要满足什么条件?
估算满足要求的面积的这种反光膜材料中最少要排布多少颗玻璃微珠?保留位有效数字
16.分拣机器人在快递行业的使用大大提高了工作效率,如图甲所示,派件员在分拣处将包裹放在静止机器人的水平托盘上,机器人沿水平地面做直线运动将包裹从分拣处运至相距的投递口,且水平运行的最大速度为,运送过程中包裹与水平托盘不发生相对滑动。机器人停止运动后缓慢翻转托盘,当托盘倾角增大到时,包裹恰好开始下滑,如图乙所示,此后托盘与水平方向的夹角保持不变,包裹沿托盘匀加速下滑,脱离托盘时的速度。已知包裹和托盘间的最大静摩擦力和滑动摩擦力的比值为,托盘翻转用时,重力加速度取,求:
包裹与托盘间的动摩擦因数;
机器人在运输包裹的过程中允许的最大加速度的大小;
包裹被机器人从分拣处运输至投递口,并沿托盘下滑至脱离的过程所需的最短时间。
17.如图,竖直面内有光滑管和,与水平方向夹角均为,、两点连线水平且间距为空间中存在垂直纸面向里的匀强磁场,磁感应强度大小为,一质量为、带电量为的小球从管的上端由静止释放,小球从点离开管道,运动一段时间后,恰好从点进入管道。带电小球从点离开管时对管道的弹力大小与从点释放时对管道的弹力大小相等。运动过程中小球的电荷量不变,小球可看作质点,重力加速度大小为。求:
管道的长度;
小球从点释放到运动到点的时间;
与、和的关系。
18.如图所示,和分别为水平和竖直固定光滑细杆,轻环和轻环分别套在和杆上,轻质“”形直角框架两端分别连接在、环上,小球固定在“”形框架的拐点处,,。足够长的木板放置在光滑水平面上,光滑小球放置在长木板的左端,小物块放置在长木板上,小物块与长木板间的动摩擦因数,间距离。某时刻对长木板施加水平向左的力,与长木板的位移的关系如图所示。已知小球和小物块的质量均为,长木板的质量,重力加速度取。滑动摩擦力等于最大静摩擦力。求:
小物块恰好相对滑动时,长木板的速度大小;
小物块与小球碰撞前的速度大小;
小物块与小球碰撞后粘在一起,碰撞后和一起上升的最大高度。
答案解析
1.
【解析】A.由图可知,光线在界面上,以相同的入射角入射的甲乙两种光,甲光发生了折射和反射,乙光发生了全反射,说明甲光发生全反射的临界角较大,根据 ,可知乙光比甲光折射率大,折射率越大,频率越大,所以甲光的频率比乙光小,故A错误;
B.甲光的折射率小,根据 ,可知在五棱镜中,甲光的传播速度比乙光的传播速度大,故B错误;
C.根据 ,可知甲光的波长较长,甲光比乙光更容易发生明显的衍射现象,故C正确;
D.根据双缝干涉条纹间距公式 ,甲光的波长较长,可知通过同一双缝干涉装置,甲光的干涉条纹间距大于乙光的干涉条纹间距,故D错误。
故选C。
2.
【解析】设结点为在三角形平面的投影为 ,根据题意和几何关系知 到、、三点的距离都相等,为
与三根轻绳间的夹角都相同,设为 ,则
故
对结点,根据平衡条件
解得绳中的张力为
故选A。
3.
【解析】A.轴线上电势点最高,故带电框带正电,故A错误;
B.将正六边形均匀带电框分割成无限多份,每份看成一个点电荷,由电场强度叠加原理可知,点场强为零,故B错误;
C. 图像切线的斜率表示电场强度,由图像可知,从点沿着轴正方向,切线的斜率先增大后减小,故场强先增大后减小,故C错误;
D.从点沿轴正方向电势逐渐降低,又因为负电荷在电势低的地方电势能大,所以负电荷从点沿轴正方向运动过程中,电势能一直增大,故D正确。
故选D。
4.
【解析】A.由题可知,此时电路中的电流
解得
根据闭合电路的欧姆定律可得
解得
A错误;
B.电动机的额定功率
电动机的热功率
故电动机的输出功率
B正确;
C.在纯电阻电路中,根据功率的计算公式,可得输出功率
当 时,输出功率最大,即有
代入数据解得
结合题意可知,电动机工作时,不是单纯的把电能转化为内能,不符合纯电阻电路的要求,C错误;
D.若电动机的转子被卡住,根据闭合电路的欧姆定律可得
变形可得
即路端电压的变化量与电路电流的变化量之比的绝对值等于太阳能电池内阻,D错误。
故选B。
5.
【解析】A.剪断轻绳的瞬间,小球受到重力和框架的弹力,将重力沿框架方向和垂直于框架方向进行分解,沿框架方向,弹力于重力的分力平衡,垂直于框架方向,根据牛顿第二定律可得
解得
A错误;
B.小球摆到最低点时,根据机械能守恒定律可得
解得
B错误;
C.小球在最低点时的向心力
根据力的合成可得,此时杆的弹力
C正确;
D.在最低点时,弹力方向与速度方向垂直,则弹力的功率为,D错误。
故选C。
6.
【解析】A.容器壁对硬币的支持力与硬币重力的合力充当了硬币做匀速圆周运动的向心力,选项A错误;
B.对硬币受力分析可知
因在点时角较小,则硬币做匀速圆周运动在点的向心加速度小于做匀速圆周运动在点的向心加速度,选项B错误;
C.根据
解得
因硬币在点时角较小且较大,则硬币在点做匀速圆周运动的周期大于在点做匀速圆周运动的周期,选项C错误;
D.根据
可得
可得硬币做匀速圆周运动在、两点的动能之比为
选项D正确。
故选D。
7.
【解析】设地球质量为,则地球表面质量为 的物体,有
设飞船质量为,由万有引力提供向心力
联立解得
故要验证航天员在空间站中所受到的地球引力与在地面上所受的重力是同一种力,需验证上式即可。
8.
【解析】A. 内
大小不变,汽车做加速度均匀增大的加速运动, 内
汽车做加速度不变的匀加速运动,故A错误;
B.在内
大小不变,加速度均匀减小,汽车牵引力减小,仍然大于所受阻力,故B错误;
C.由图可知加速度的变化图像,如图
图像的面积表示速度的增加量
内,对汽车由动量定理得
又 ,解得汽车牵引力的冲量大小为
故C正确;
D.时,对汽车由牛顿第二定律得
由 图可知
解得牵引力大小为
内汽车速度增大量为
时汽车的速度大小为
时,汽车牵引力的功率为
故D错误。
故选C。
9.
【解析】导体棒在外力作用下沿倾斜轨道开始匀速下滑,速度大小为。由导体切割磁感应线产生感应电动势,设水平导轨宽为 ,对有
导体棒受安培力作用做加速运动,同时也在切割磁感线,当闭合电路中的电流减小为零,导体棒速度达到最大速度 ,此时两棒产生的感应电动势大小相等,有
解得
A正确,B错误;
导体棒整个加速运动过程中,导体棒和受到的安培力大小始终相等,安培力对导体棒和的冲量大小相等,对导体棒,由动量定理
解得
故安培力对导体棒的冲量大小为 ,C正确,D错误。
故选AC。
10.
【解析】A.根据左手定则可知,电子受到的洛伦兹力应沿轴正方向,A错误;
B.将电子速度沿轴和轴进行分解,则在轴方向上,电子不受磁场力的作用,电子做匀速直线运动,则有
电子运动到的时间
电子在轴做匀速圆周运动,洛伦兹力提供向心力,则有
若电子恰好运动一周打在点,则有
联立解得
根据运动的等时性可得
即
解得
B正确;
C.根据动能定理可知
解得
加速电压减小时,电子进入磁场的速度减小,在磁场中运动时,则有
解得
故电子圆周运动的半径减小,不一定打在点上,C错误;
D.增大励磁线圈电流,磁感应强度增大,电子运动的半径减小,要使电子仍打在点,对于的圆心角 增大,结合圆周运动规律可得,电子的周期
则运动周期减小,电子在磁场中运动的时间则为
运动时间可以不变,D正确。
故选BD。
11.
【解析】A.图为甲波上处质点的振动图像,时,处质点向上振动,根据平移法可知,甲波沿轴负方向传播,故A正确;
C.由图可知时,处质点运动到平衡位置,根据甲波沿轴负方向传播,可知经,处质点的运动形式传播到处,则
两波在同一介质传播,速度相等,故C正确;
B.甲的波长为,则周期为
处质点的振动方程为
将 , 代入解得
将时刻代入解得
故B错误;
D.经,两列波传播的距离为
乙向轴正方向传播,根据波的周期性可知此时波谷传到处,甲的波峰传到处,由于振幅相等,则处质点的位移为,故D正确;
故选ACD。
12.
【解析】小球上升时,在竖直方向上为竖直上抛,在水平方向上为匀速直线运动。所以要使小球恰好能够抛过该建筑物的初速度最小,则小球刚好上升经过建筑物时速度最小,设小球上升经过建筑物边缘时的速度大小为 ,与水平方向的夹角为 ,则小球在竖直方向的分速度大小为
所以,小球经过建筑物的时间为
在水平方向上匀速直线,则
其中
整理可得
所以,当 时, 最小,为
则上升距地面最大高度
小球在水平方向的分速度为
故选AD。
13.
大于
【解析】小球半径大小必须要相等,否则两球不能发生对心碰撞,则对实验结果会有影响,选项 A错误;
B. 小球做平抛运动,则
落到斜面上时距离抛出点的距离
可知
则实验中可以用 代替速度,不需要用量角器测量斜面倾斜角度,选项B错误;
C. 根据
可知,斜面倾角应适当大一些,这样小球落在斜面上的位置会较远一些,选项C正确;
故选C。
若碰撞过程动量守恒,则
若满足机械能守恒,则
其中
可得
可知碰后球反弹,以后再次滑上凹槽后再滑回底端飞出,因 ,可知点是球碰前的落点,点是球碰后的落点,点是球碰后的落点,根据
带入
可得
若考虑玻璃圆弧轨道的阻力影响,因小球碰后滑上圆轨道再返回底端时要损失能量,则使得返回到达底端时速度偏小,则 偏小,根据
可知碰后的系统总动量大于碰前的系统总动量。
14.
都算对
【解析】由欧姆表的示数可知,此电阻约为 ,而灵敏电流计和电压表的内阻
故灵敏电流计电流表应采用内接法,因此选图。
为了方便调节,滑动变阻器应选择规格小的滑动变阻器,故选择 。
描点作出电子元件的伏安特性曲线如图所示
根据伏安特性曲线斜率的意义可得
代入数据解得
15.光线从球面上的点折射进入,入射角为,折射角为,根据折射定律有
几何关系知
解得
,
设入射光线与出射光线间的距离为,玻璃微珠直径为,几何关系知
若
有
得
当 时,一个玻璃微珠的截面积
最少玻璃微珠颗数
得
颗
【解析】详细解答和解析过程见答案
16.设包裹质量为,当 时包裹恰好开始下滑,重力沿斜面的分力大小等于最大静摩擦力大小
代入数据解得
运送过程中包裹与水平托盘不发生相对滑动,彼此间达到最大静摩擦力加速度最大,设水平运送过程中的最大加速度为,由牛顿第二定律
代入数据解得
当机器人先以最大加速度做匀加速直线运动,加速至最大速度,然后做匀速直线运动,最后以最大加速度做匀减速直线运动至零时,机器人从分拣处运行至投递口所需时间最短,设匀加速直线运动的时间为 ,运动的位移为 ;同理可得匀减速直线运动的时间为 ,运动的位移为 ;匀速运动的时间为 ,则有
设包裹沿托盘匀加速下滑的加速度为,有
则机器人从分拣处运行至投递口所需最短时间为
所需的最短时间为
【解析】详细解答和解析过程见答案
17.小球在点时有
小球在点有
又
对过程有
联立解得
对过程
联立得
将离开时的速度沿水平方向和竖直方向分解,如图所示
由于
故小球由到的运动可分解为水平方向的速度大小为 的匀速直线运动和竖直面内的速度大小为 的匀速圆周运动,故
对小球由到的过程有
小球从点释放到运动到点的时间
联立解得
小球由点到点过程有
其中
联立解得
其中
【解析】详细解答和解析过程见答案
18.对,根据牛顿第二定律
对、,根据牛顿第二定律
恰好相对滑动时,的位移
B、恰好相对滑动前,做功
B、恰好相对滑动前
联立解得
根据题意
对、恰好相对滑动后至、碰撞前
联立解得
碰撞前瞬间物块沿方向的分量
碰撞过程
上升过程
联立解得最大高度
【解析】详细解答和解析过程见答案
第1页,共1页
一、单选题:本大题共8小题,共24分。
1.五棱镜是单反相机取景的反光装置,其作用是将对焦屏上左右颠倒的图像矫正过来,使取景看到的图像与直接看到的景物方位完全一致,使操作者能够正确地取景和对焦。某生产车间对其生产的某块五棱镜进行质检时,让甲、乙两种单色光组成的细光束从空气垂直于边射入棱镜,经两次反射后,光线垂直于边射出,但在边发现有部分甲光射出,其光路图如图所示。则( )
A. 甲光的频率比乙光的频率大
B. 在五棱镜中,甲光的传播速度比乙光的传播速度小
C. 甲光比乙光更容易发生明显的衍射现象
D. 通过同一双缝干涉装置,甲光的干涉条纹间距小于乙光的干涉条纹间距
2.如图所示,完全相同的三根刚性柱竖直固定在水平地面上的、、三点上,三点恰好在等边三角形的三个顶点上,三角形的边长为,三根完全一样的轻绳一端固定在、、三点上,另一端栓接在一起,结点为。现把质量为的重物用轻绳静止悬挂在结点处,点到平面的距离为,重物不接触地面,当地重力加速度为。则绳中的张力为( )
A. B. C. D.
3.如图甲,水平面上有一正六边形均匀带电框,点为正六边形的中心,过点竖直向上建立坐标轴。轴线上电势分布如图乙所示。则( )
A. 带电框带负电
B. 点场强沿轴正方向
C. 从点沿着轴正方向,场强一直增大
D. 负电荷从点沿轴正方向运动过程中,电势能一直增大
4.如图甲所示为中国首辆火星车,命名为“祝融号”,主要任务是在火星上开展地表成分、物质类型分布、地质结构以及火星气象环境等探测工作,是一辆纯太阳能电动车,其动力主要来源于太阳能电池。现将火星车的动力供电电路简化为如图乙所示,其中太阳能电池电动势,电动机线圈的电阻。在火星车行驶的过程中,当滑动变阻器接入电路的电阻时,滑动变阻器消耗的功率,此时,电动机正常工作,两端电压。则( )
A. 太阳能电池的内阻
B. 电动机正常工作时的输出功率出
C. 滑动变阻器接入电路中的阻值时,电源的输出功率最大
D. 若电动机的转子被卡住,路端电压的变化量与电路电流的变化量之比的绝对值大于太阳能电池内阻
5.如图,形状为“”的轻质框架,,段和段的长度均为。框架的一端悬挂于点,并可绕点处的光滑转轴在竖直平面内自由转动,另一端固定一小球,小球的质量为。轻绳一端连接在小球上,另一端连接在竖直墙壁上。框架段和轻绳均处于水平状态。忽略空气阻力,重力加速度大小为。剪断轻绳,则( )
A. 剪断轻绳瞬间,小球的加速度大小为
B. 小球到最低点时的速度大小为
C. 小球到最低点时框架对小球的弹力大小为
D. 小球到最低点时框架对小球弹力的功率大小为
6.如图甲所示,一款旋转硬币游乐设备。图乙是该装置的示意图,为其对称轴,且竖直。将一元钱的硬币从上端入口沿容器壁边缘水平切线方向滚入,硬币恰好沿容器壁做螺旋运动,转很多圈后到达底部。该硬币在水平方向的运动可近似看做匀速圆周运动,曲面在、两点的切线与水平方向的夹角分别为和,匀速圆周运动的轨道半径分别为、,重力加速度取则硬币在运动过程中( )
A. 容器壁对硬币的支持力充当了硬币做匀速圆周运动的向心力
B. 硬币做匀速圆周运动在点的向心加速度大于做匀速圆周运动在点的向心加速度
C. 硬币在点做匀速圆周运动的周期小于在点做匀速圆周运动的周期
D. 硬币做匀速圆周运动在、两点的动能之比为
7.年月日神舟十九号载人飞行任务取得圆满成功,神舟十九号航天员乘组将开展空间科学与应用实验和试验,实施航天员出舱活动及货物进出舱,进行空间站空间碎片防护装置安装、舱外载荷和舱外设备安装与回收等任务。已知地球的半径为,空间站到地球表面的距离为,空间站围绕地球运动的周期为,地球表面的重力加速度为。空间站绕地球的运动近似看作匀速圆周运动,不考虑地球自转。要验证航天员在空间站中所受到的地球引力与在地面上所受的重力是同一种力,需验证( )
A. B. C. D.
8.我国的新能源汽车发展迅速,多项指标处于世界领先地位,“急动度”就是其中之一。它对汽车的影响是多方面的,涉及发动机、变速箱、油耗、轮胎、刹车系统等多个关键部件。了解“急动度”有助于我们在日常驾驶中采取更合理的驾驶习惯,保护车辆,延长其使用寿命。急动度是汽车的加速度随时间的变化率,定义式为。一辆汽车沿平直公路以的速度做匀速运动,时刻开始加速,内汽车运动过程的急动度随时间变化的图像如图所示。已知该汽车质量,运动过程中所受阻力。则( )
A. 汽车在内做匀速运动
B. 在内,汽车牵引力小于所受阻力
C. 内,汽车牵引力的冲量大小为
D. 时,汽车牵引力的功率为
二、多选题:本大题共4小题,共16分。
9.如图,两根足够长的光滑平行导轨和,部分水平,部分倾斜,且与水平面的夹角为。空间存在竖直向上的匀强磁场。导体棒静止放置在水平部分上。时刻,导体棒在外力作用下沿倾斜轨道开始匀速下滑,速度大小为。已知两导体棒的质量均为,导体棒始终在水平轨道上,导体棒始终在倾斜轨道上,运动过程中两棒与导轨接触良好。则( )
A. 导体棒的最大速度为
B. 导体棒的最大速度为
C. 导体棒整个加速运动过程中,安培力对导体棒的冲量大小为
D. 导体棒整个加速运动过程中,安培力对导体棒的冲量大小为
10.图甲为洛伦兹力演示仪的实物图,励磁线圈中的电流可在两励磁线圈中间空间产生垂直于线圈平面的匀强磁场,调节励磁线圈中的电流可改变磁感应强度大小。玻璃泡内充有稀有气体,电子枪射出的电子在稀有气体中运动可显示出其运动径迹,调节电子枪的加速电压可改变电子初速度大小。从侧面看,演示仪内部构造如图乙所示,以电子枪枪口为坐标原点,沿磁场方向建立轴,竖直方向建立轴,垂直平面向里建立轴。电子束从点以速度沿平面射出,且与轴正方向夹角为。某次实验时,观察到电子束打在玻璃泡与轴的交点处。已知两点间距为,电子的质量为,电荷量大小为,不考虑电子的重力及电子间的相互作用力。则( )
A. 从点射出的电子受到的洛伦兹力的方向沿轴负方向
B. 匀强磁场的大小可能为
C. 减小加速电压,从点射出的电子一定打在点
D. 增大励磁线圈电流,使电子从点射出仍打在点,电子在玻璃泡中运动的时间不变
11.甲、乙两列简谐横波在同一均匀介质中沿轴传播,且传播方向不同,图为时刻两列波的波形图,图为甲波上处质点的振动图像。下列说法正确的是( )
A. 甲波沿轴负方向传播
B. 时刻甲波上处的质点的位移为
C. 乙波在介质中传播的速度大小为
D. 时坐标原点处的质点的位移为
12.如图,水平地面上有一截面为正方形的建筑物,边长为。在地面上某一确定高度斜向上抛出一小球,要使小球恰好能够抛过该建筑物的初速度最小。空气阻力不计,重力加速度为,则小球运动过程中( )
A. 距地面最大高度为
B. 由于抛出点未知,故小球运动过程中距地面的最大高度不能确定
C. 小球在水平方向的分速度大小为
D. 小球在水平方向的分速度大小为
三、实验题:本大题共2小题,共14分。
13.某物理兴趣小组在课本验证动量守恒的碰撞实验的基础上进行了进一步探索。他们寻找并选用了表面近似看作光滑的玻璃圆弧轨道,选用两个大小相等、质量不等的刚性小球和,且,实验时,他们先让小球从光滑圆弧轨道上某一位置由静止释放,在轨道末端点水平抛出,最后落在搭在轨道末端点与地面间的固定斜面上,记下小球与斜面第一次碰撞留下的落点痕迹。再把被碰小球放在玻璃轨道末端,让入射小球从相同位置由静止释放,与被碰小球碰撞后都落到斜面上,并记录两次的落点痕迹。、、为从点向下三个落点的位置不考虑小球在斜面上的多次碰撞,斜面上点与各落点的距离分别为、、。
关于本实验,下列说法正确的是_____。
A.小球半径大小对实验结果没有影响
B.需要用量角器测量斜面倾斜角度
C.斜面倾角应适当大一些
小组同学猜测两小球的碰撞应该为弹性碰撞,则能说明两球碰撞前后总动量守恒的关系式为____用、、表示
若考虑玻璃圆弧轨道的阻力影响,碰后的系统总动量____碰前的系统总动量填“大于”、“小于”或“等于”。
14.某学习小组要描述某一电子元件的伏安特性曲线,实验室提供有下列器材:
多用电表;
灵敏电流计,内阻约为;
电压表,内阻约为;
滑动变阻器;
滑动变阻器;
两节干电池;
导线开关若干。
为了确定实验电路,先用欧姆表粗测电子元件的电阻,示数如图所示。根据提供的器材和测量的数据,电路图应该选图____填“”或者“”
滑动变阻器应该选取____选填“”或“”。
本实验测出的数据如下表所示,请在图中描绘出电子元件的伏安特性曲线。
根据所描绘的图线,得出该电子元件的阻值为____结果保留两位有效数字。
四、计算题:本大题共4小题,共46分。
15.玻璃微珠材料是用玻璃制成的微小球体材料,常在道路标志线、标志牌及衣服的反光条中使用,它能将车灯照射过来的光逆向返回,从而使得在夜间行车没有路灯的情况下,能看清道路和交通标志,增强车辆驾驶员和行人的可见度,提高安全性。用这种材料制成的某反光膜内均匀分布着单层细玻璃珠,如图甲所示,所用玻璃的折射率。一束平行光照射到玻璃微珠上时,部分光线经一次反射和两次折射后沿与入射方向相反的方向射回。
如图乙所示,除经过球心的光线外,还有入射光线能被反向平行射回,求该光线第一次进入玻璃微球的入射角多大?
要保证能有足够强度的光被“反向射回”,要求入射光与其“反向射回”的光之间的距离应不大于,则玻璃微球的直径要满足什么条件?
估算满足要求的面积的这种反光膜材料中最少要排布多少颗玻璃微珠?保留位有效数字
16.分拣机器人在快递行业的使用大大提高了工作效率,如图甲所示,派件员在分拣处将包裹放在静止机器人的水平托盘上,机器人沿水平地面做直线运动将包裹从分拣处运至相距的投递口,且水平运行的最大速度为,运送过程中包裹与水平托盘不发生相对滑动。机器人停止运动后缓慢翻转托盘,当托盘倾角增大到时,包裹恰好开始下滑,如图乙所示,此后托盘与水平方向的夹角保持不变,包裹沿托盘匀加速下滑,脱离托盘时的速度。已知包裹和托盘间的最大静摩擦力和滑动摩擦力的比值为,托盘翻转用时,重力加速度取,求:
包裹与托盘间的动摩擦因数;
机器人在运输包裹的过程中允许的最大加速度的大小;
包裹被机器人从分拣处运输至投递口,并沿托盘下滑至脱离的过程所需的最短时间。
17.如图,竖直面内有光滑管和,与水平方向夹角均为,、两点连线水平且间距为空间中存在垂直纸面向里的匀强磁场,磁感应强度大小为,一质量为、带电量为的小球从管的上端由静止释放,小球从点离开管道,运动一段时间后,恰好从点进入管道。带电小球从点离开管时对管道的弹力大小与从点释放时对管道的弹力大小相等。运动过程中小球的电荷量不变,小球可看作质点,重力加速度大小为。求:
管道的长度;
小球从点释放到运动到点的时间;
与、和的关系。
18.如图所示,和分别为水平和竖直固定光滑细杆,轻环和轻环分别套在和杆上,轻质“”形直角框架两端分别连接在、环上,小球固定在“”形框架的拐点处,,。足够长的木板放置在光滑水平面上,光滑小球放置在长木板的左端,小物块放置在长木板上,小物块与长木板间的动摩擦因数,间距离。某时刻对长木板施加水平向左的力,与长木板的位移的关系如图所示。已知小球和小物块的质量均为,长木板的质量,重力加速度取。滑动摩擦力等于最大静摩擦力。求:
小物块恰好相对滑动时,长木板的速度大小;
小物块与小球碰撞前的速度大小;
小物块与小球碰撞后粘在一起,碰撞后和一起上升的最大高度。
答案解析
1.
【解析】A.由图可知,光线在界面上,以相同的入射角入射的甲乙两种光,甲光发生了折射和反射,乙光发生了全反射,说明甲光发生全反射的临界角较大,根据 ,可知乙光比甲光折射率大,折射率越大,频率越大,所以甲光的频率比乙光小,故A错误;
B.甲光的折射率小,根据 ,可知在五棱镜中,甲光的传播速度比乙光的传播速度大,故B错误;
C.根据 ,可知甲光的波长较长,甲光比乙光更容易发生明显的衍射现象,故C正确;
D.根据双缝干涉条纹间距公式 ,甲光的波长较长,可知通过同一双缝干涉装置,甲光的干涉条纹间距大于乙光的干涉条纹间距,故D错误。
故选C。
2.
【解析】设结点为在三角形平面的投影为 ,根据题意和几何关系知 到、、三点的距离都相等,为
与三根轻绳间的夹角都相同,设为 ,则
故
对结点,根据平衡条件
解得绳中的张力为
故选A。
3.
【解析】A.轴线上电势点最高,故带电框带正电,故A错误;
B.将正六边形均匀带电框分割成无限多份,每份看成一个点电荷,由电场强度叠加原理可知,点场强为零,故B错误;
C. 图像切线的斜率表示电场强度,由图像可知,从点沿着轴正方向,切线的斜率先增大后减小,故场强先增大后减小,故C错误;
D.从点沿轴正方向电势逐渐降低,又因为负电荷在电势低的地方电势能大,所以负电荷从点沿轴正方向运动过程中,电势能一直增大,故D正确。
故选D。
4.
【解析】A.由题可知,此时电路中的电流
解得
根据闭合电路的欧姆定律可得
解得
A错误;
B.电动机的额定功率
电动机的热功率
故电动机的输出功率
B正确;
C.在纯电阻电路中,根据功率的计算公式,可得输出功率
当 时,输出功率最大,即有
代入数据解得
结合题意可知,电动机工作时,不是单纯的把电能转化为内能,不符合纯电阻电路的要求,C错误;
D.若电动机的转子被卡住,根据闭合电路的欧姆定律可得
变形可得
即路端电压的变化量与电路电流的变化量之比的绝对值等于太阳能电池内阻,D错误。
故选B。
5.
【解析】A.剪断轻绳的瞬间,小球受到重力和框架的弹力,将重力沿框架方向和垂直于框架方向进行分解,沿框架方向,弹力于重力的分力平衡,垂直于框架方向,根据牛顿第二定律可得
解得
A错误;
B.小球摆到最低点时,根据机械能守恒定律可得
解得
B错误;
C.小球在最低点时的向心力
根据力的合成可得,此时杆的弹力
C正确;
D.在最低点时,弹力方向与速度方向垂直,则弹力的功率为,D错误。
故选C。
6.
【解析】A.容器壁对硬币的支持力与硬币重力的合力充当了硬币做匀速圆周运动的向心力,选项A错误;
B.对硬币受力分析可知
因在点时角较小,则硬币做匀速圆周运动在点的向心加速度小于做匀速圆周运动在点的向心加速度,选项B错误;
C.根据
解得
因硬币在点时角较小且较大,则硬币在点做匀速圆周运动的周期大于在点做匀速圆周运动的周期,选项C错误;
D.根据
可得
可得硬币做匀速圆周运动在、两点的动能之比为
选项D正确。
故选D。
7.
【解析】设地球质量为,则地球表面质量为 的物体,有
设飞船质量为,由万有引力提供向心力
联立解得
故要验证航天员在空间站中所受到的地球引力与在地面上所受的重力是同一种力,需验证上式即可。
8.
【解析】A. 内
大小不变,汽车做加速度均匀增大的加速运动, 内
汽车做加速度不变的匀加速运动,故A错误;
B.在内
大小不变,加速度均匀减小,汽车牵引力减小,仍然大于所受阻力,故B错误;
C.由图可知加速度的变化图像,如图
图像的面积表示速度的增加量
内,对汽车由动量定理得
又 ,解得汽车牵引力的冲量大小为
故C正确;
D.时,对汽车由牛顿第二定律得
由 图可知
解得牵引力大小为
内汽车速度增大量为
时汽车的速度大小为
时,汽车牵引力的功率为
故D错误。
故选C。
9.
【解析】导体棒在外力作用下沿倾斜轨道开始匀速下滑,速度大小为。由导体切割磁感应线产生感应电动势,设水平导轨宽为 ,对有
导体棒受安培力作用做加速运动,同时也在切割磁感线,当闭合电路中的电流减小为零,导体棒速度达到最大速度 ,此时两棒产生的感应电动势大小相等,有
解得
A正确,B错误;
导体棒整个加速运动过程中,导体棒和受到的安培力大小始终相等,安培力对导体棒和的冲量大小相等,对导体棒,由动量定理
解得
故安培力对导体棒的冲量大小为 ,C正确,D错误。
故选AC。
10.
【解析】A.根据左手定则可知,电子受到的洛伦兹力应沿轴正方向,A错误;
B.将电子速度沿轴和轴进行分解,则在轴方向上,电子不受磁场力的作用,电子做匀速直线运动,则有
电子运动到的时间
电子在轴做匀速圆周运动,洛伦兹力提供向心力,则有
若电子恰好运动一周打在点,则有
联立解得
根据运动的等时性可得
即
解得
B正确;
C.根据动能定理可知
解得
加速电压减小时,电子进入磁场的速度减小,在磁场中运动时,则有
解得
故电子圆周运动的半径减小,不一定打在点上,C错误;
D.增大励磁线圈电流,磁感应强度增大,电子运动的半径减小,要使电子仍打在点,对于的圆心角 增大,结合圆周运动规律可得,电子的周期
则运动周期减小,电子在磁场中运动的时间则为
运动时间可以不变,D正确。
故选BD。
11.
【解析】A.图为甲波上处质点的振动图像,时,处质点向上振动,根据平移法可知,甲波沿轴负方向传播,故A正确;
C.由图可知时,处质点运动到平衡位置,根据甲波沿轴负方向传播,可知经,处质点的运动形式传播到处,则
两波在同一介质传播,速度相等,故C正确;
B.甲的波长为,则周期为
处质点的振动方程为
将 , 代入解得
将时刻代入解得
故B错误;
D.经,两列波传播的距离为
乙向轴正方向传播,根据波的周期性可知此时波谷传到处,甲的波峰传到处,由于振幅相等,则处质点的位移为,故D正确;
故选ACD。
12.
【解析】小球上升时,在竖直方向上为竖直上抛,在水平方向上为匀速直线运动。所以要使小球恰好能够抛过该建筑物的初速度最小,则小球刚好上升经过建筑物时速度最小,设小球上升经过建筑物边缘时的速度大小为 ,与水平方向的夹角为 ,则小球在竖直方向的分速度大小为
所以,小球经过建筑物的时间为
在水平方向上匀速直线,则
其中
整理可得
所以,当 时, 最小,为
则上升距地面最大高度
小球在水平方向的分速度为
故选AD。
13.
大于
【解析】小球半径大小必须要相等,否则两球不能发生对心碰撞,则对实验结果会有影响,选项 A错误;
B. 小球做平抛运动,则
落到斜面上时距离抛出点的距离
可知
则实验中可以用 代替速度,不需要用量角器测量斜面倾斜角度,选项B错误;
C. 根据
可知,斜面倾角应适当大一些,这样小球落在斜面上的位置会较远一些,选项C正确;
故选C。
若碰撞过程动量守恒,则
若满足机械能守恒,则
其中
可得
可知碰后球反弹,以后再次滑上凹槽后再滑回底端飞出,因 ,可知点是球碰前的落点,点是球碰后的落点,点是球碰后的落点,根据
带入
可得
若考虑玻璃圆弧轨道的阻力影响,因小球碰后滑上圆轨道再返回底端时要损失能量,则使得返回到达底端时速度偏小,则 偏小,根据
可知碰后的系统总动量大于碰前的系统总动量。
14.
都算对
【解析】由欧姆表的示数可知,此电阻约为 ,而灵敏电流计和电压表的内阻
故灵敏电流计电流表应采用内接法,因此选图。
为了方便调节,滑动变阻器应选择规格小的滑动变阻器,故选择 。
描点作出电子元件的伏安特性曲线如图所示
根据伏安特性曲线斜率的意义可得
代入数据解得
15.光线从球面上的点折射进入,入射角为,折射角为,根据折射定律有
几何关系知
解得
,
设入射光线与出射光线间的距离为,玻璃微珠直径为,几何关系知
若
有
得
当 时,一个玻璃微珠的截面积
最少玻璃微珠颗数
得
颗
【解析】详细解答和解析过程见答案
16.设包裹质量为,当 时包裹恰好开始下滑,重力沿斜面的分力大小等于最大静摩擦力大小
代入数据解得
运送过程中包裹与水平托盘不发生相对滑动,彼此间达到最大静摩擦力加速度最大,设水平运送过程中的最大加速度为,由牛顿第二定律
代入数据解得
当机器人先以最大加速度做匀加速直线运动,加速至最大速度,然后做匀速直线运动,最后以最大加速度做匀减速直线运动至零时,机器人从分拣处运行至投递口所需时间最短,设匀加速直线运动的时间为 ,运动的位移为 ;同理可得匀减速直线运动的时间为 ,运动的位移为 ;匀速运动的时间为 ,则有
设包裹沿托盘匀加速下滑的加速度为,有
则机器人从分拣处运行至投递口所需最短时间为
所需的最短时间为
【解析】详细解答和解析过程见答案
17.小球在点时有
小球在点有
又
对过程有
联立解得
对过程
联立得
将离开时的速度沿水平方向和竖直方向分解,如图所示
由于
故小球由到的运动可分解为水平方向的速度大小为 的匀速直线运动和竖直面内的速度大小为 的匀速圆周运动,故
对小球由到的过程有
小球从点释放到运动到点的时间
联立解得
小球由点到点过程有
其中
联立解得
其中
【解析】详细解答和解析过程见答案
18.对,根据牛顿第二定律
对、,根据牛顿第二定律
恰好相对滑动时,的位移
B、恰好相对滑动前,做功
B、恰好相对滑动前
联立解得
根据题意
对、恰好相对滑动后至、碰撞前
联立解得
碰撞前瞬间物块沿方向的分量
碰撞过程
上升过程
联立解得最大高度
【解析】详细解答和解析过程见答案
第1页,共1页
同课章节目录