2024-2025学年山东省名校联盟高一(上)12月联考物理试卷(含答案)
文档属性
| 名称 | 2024-2025学年山东省名校联盟高一(上)12月联考物理试卷(含答案) |

|
|
| 格式 | |||
| 文件大小 | 793.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-01-24 00:00:00 | ||
图片预览
文档简介
2024-2025 学年山东省名校联盟高一(上)12 月联考物理试卷
一、单选题:本大题共 8 小题,共 24 分。
1.2024年8月1日凌晨,在巴黎奥运会游泳项目男子100米自由泳决赛中,中国选手潘展乐以46秒40的成绩
夺得冠军,并打破世界纪录。比赛中,他表现出了惊人的爆发力、世界顶尖的半程转身技术和稳定的冲刺
能力。国际标准游泳池长度为50 。下列说法中正确的是
A. 项目的100米是指运动员位移的大小 B. 比赛成绩46秒40是指他夺冠的那一时刻
C. 研究他的转身技术时不可以把他看作质点 D. 冲刺阶段他的惯性随着速度增大而变大
2.如图所示,将小球从 点竖直向下抛出,小球落地后竖直反弹回 点不再上升,不计空气阻力,下列说法
正确的是
A. 小球下落过程中,加速度方向向下 B. 小球上升过程中,加速度方向向上
C. 小球下落过程中,加速度越来越大 D. 小球上升过程中,加速度越来越小
3.如图甲、乙所示, , 两球均保持静止。甲图中两球靠在一起放在水平地面上,乙图中 球用轻绳拴住
并悬挂在竖直墙上, 球在水平地面上。已知所有接触面均光滑,关于两球受力情况下列说法中正确的是
A. 两图中 球均受三个力
B. 两图中 球受到地面的支持力均等于它的重力
C. 图甲中 球对地面的压力就是它的重力
D. 图乙中 球受到 球的弹力是因为 球产生形变
第 1 页,共 12 页
4.某司机驾驶汽车正以20 / 的速度行驶,在距离人行横道停车线48 处看到有行人通行,司机经过一定
反应时间后采取制动措施。制动后,汽车以5 / 2的加速度做匀减速直线运动。为了在停车线前停车,该
司机的反应时间不应超过
A. 0.5 B. 0.4 C. 0.3 D. 0.2
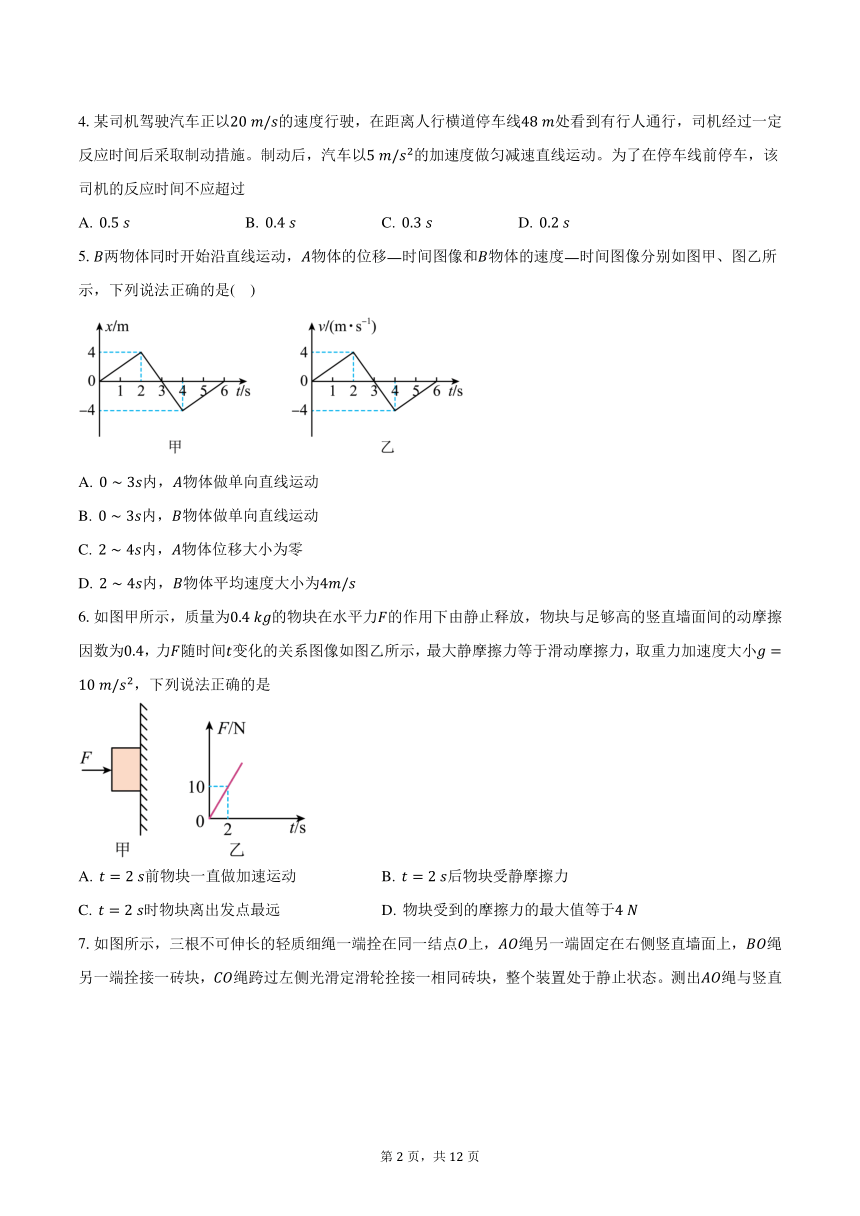
5. 两物体同时开始沿直线运动, 物体的位移—时间图像和 物体的速度—时间图像分别如图甲、图乙所
示,下列说法正确的是( )
A. 0 3 内, 物体做单向直线运动
B. 0 3 内, 物体做单向直线运动
C. 2 4 内, 物体位移大小为零
D. 2 4 内, 物体平均速度大小为4 /
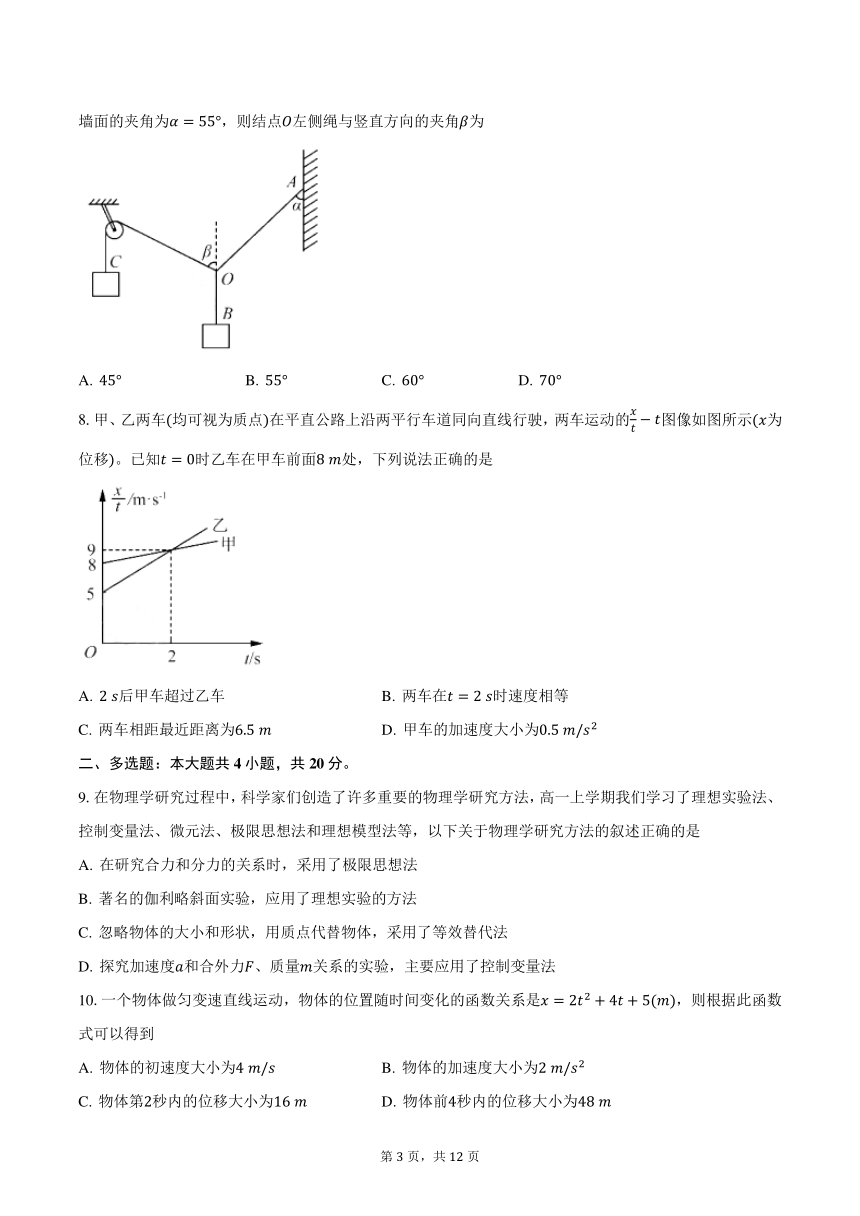
6.如图甲所示,质量为0.4 的物块在水平力 的作用下由静止释放,物块与足够高的竖直墙面间的动摩擦
因数为0.4,力 随时间 变化的关系图像如图乙所示,最大静摩擦力等于滑动摩擦力,取重力加速度大小 =
10 / 2,下列说法正确的是
A. = 2 前物块一直做加速运动 B. = 2 后物块受静摩擦力
C. = 2 时物块离出发点最远 D. 物块受到的摩擦力的最大值等于4
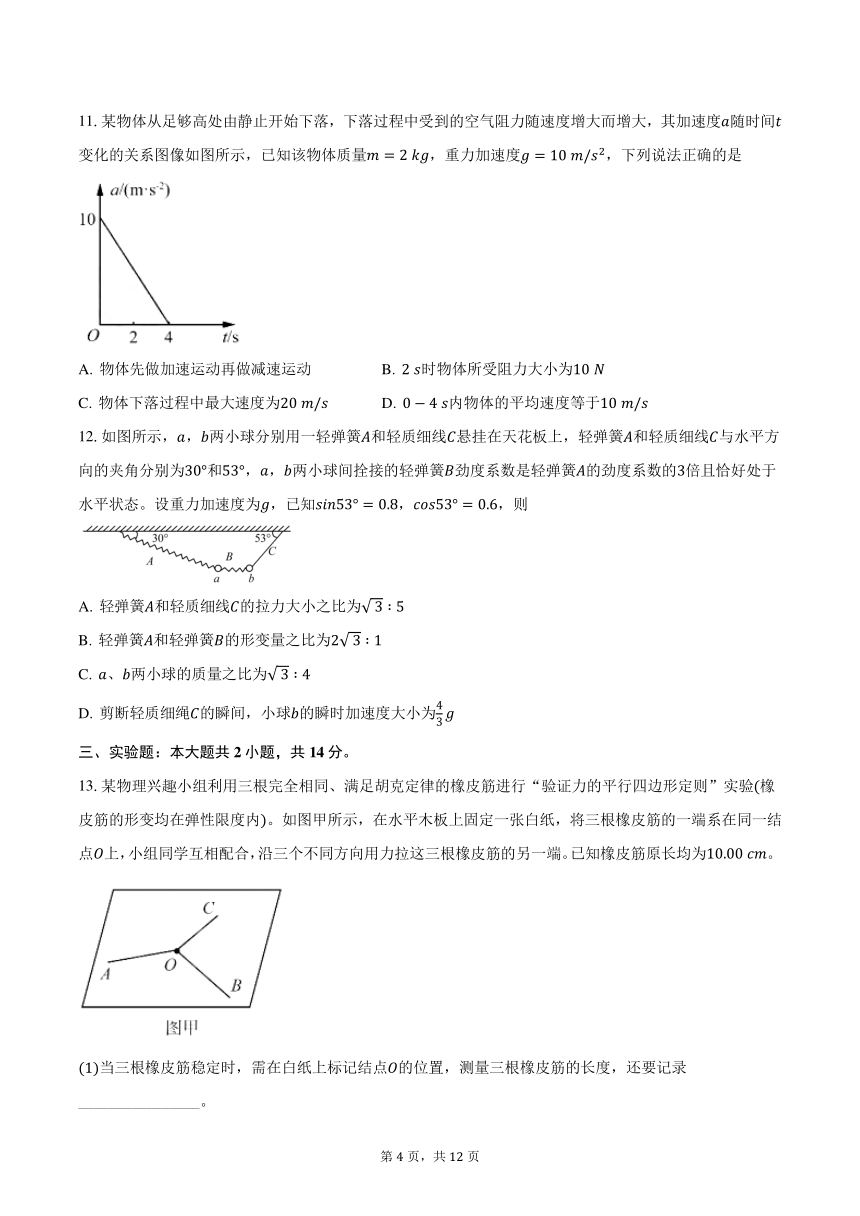
7.如图所示,三根不可伸长的轻质细绳一端拴在同一结点 上, 绳另一端固定在右侧竖直墙面上, 绳
另一端拴接一砖块, 绳跨过左侧光滑定滑轮拴接一相同砖块,整个装置处于静止状态。测出 绳与竖直
第 2 页,共 12 页
墙面的夹角为 = 55°,则结点 左侧绳与竖直方向的夹角 为
A. 45° B. 55° C. 60° D. 70°
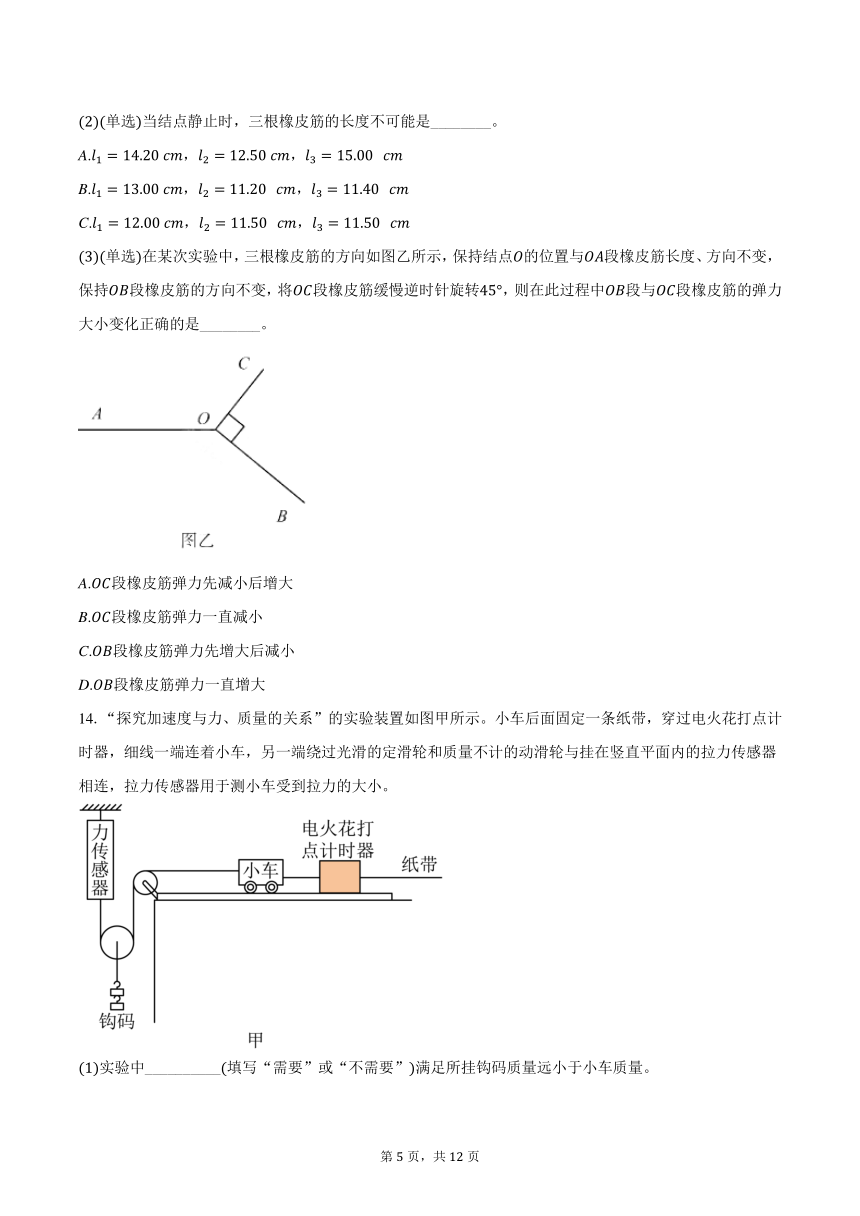
8.甲、乙两车(均可视为质点)在平直公路上沿两平行车道同向直线行驶,两车运动的 图像如图所示( 为
位移)。已知 = 0时乙车在甲车前面8 处,下列说法正确的是
A. 2 后甲车超过乙车 B. 两车在 = 2 时速度相等
C. 两车相距最近距离为6.5 D. 甲车的加速度大小为0.5 / 2
二、多选题:本大题共 4 小题,共 20 分。
9.在物理学研究过程中,科学家们创造了许多重要的物理学研究方法,高一上学期我们学习了理想实验法、
控制变量法、微元法、极限思想法和理想模型法等,以下关于物理学研究方法的叙述正确的是
A. 在研究合力和分力的关系时,采用了极限思想法
B. 著名的伽利略斜面实验,应用了理想实验的方法
C. 忽略物体的大小和形状,用质点代替物体,采用了等效替代法
D. 探究加速度 和合外力 、质量 关系的实验,主要应用了控制变量法
10.一个物体做匀变速直线运动,物体的位置随时间变化的函数关系是 = 2 2 + 4 + 5( ),则根据此函数
式可以得到
A. 物体的初速度大小为4 / B. 物体的加速度大小为2 / 2
C. 物体第2秒内的位移大小为16 D. 物体前4秒内的位移大小为48
第 3 页,共 12 页
11.某物体从足够高处由静止开始下落,下落过程中受到的空气阻力随速度增大而增大,其加速度 随时间
变化的关系图像如图所示,已知该物体质量 = 2 ,重力加速度 = 10 / 2,下列说法正确的是
A. 物体先做加速运动再做减速运动 B. 2 时物体所受阻力大小为10
C. 物体下落过程中最大速度为20 / D. 0 4 内物体的平均速度等于10 /
12.如图所示, , 两小球分别用一轻弹簧 和轻质细线 悬挂在天花板上,轻弹簧 和轻质细线 与水平方
向的夹角分别为30°和53°, , 两小球间拴接的轻弹簧 劲度系数是轻弹簧 的劲度系数的3倍且恰好处于
水平状态。设重力加速度为 ,已知 53° = 0.8, 53° = 0.6,则
A. 轻弹簧 和轻质细线 的拉力大小之比为√ 3 ∶ 5
B. 轻弹簧 和轻弹簧 的形变量之比为2√ 3 ∶ 1
C. 、 两小球的质量之比为√ 3 ∶ 4
4
D. 剪断轻质细绳 的瞬间,小球 的瞬时加速度大小为
3
三、实验题:本大题共 2 小题,共 14 分。
13.某物理兴趣小组利用三根完全相同、满足胡克定律的橡皮筋进行“验证力的平行四边形定则”实验(橡
皮筋的形变均在弹性限度内)。如图甲所示,在水平木板上固定一张白纸,将三根橡皮筋的一端系在同一结
点 上,小组同学互相配合,沿三个不同方向用力拉这三根橡皮筋的另一端。已知橡皮筋原长均为10.00 。
(1)当三根橡皮筋稳定时,需在白纸上标记结点 的位置,测量三根橡皮筋的长度,还要记录
________________。
第 4 页,共 12 页
(2)(单选)当结点静止时,三根橡皮筋的长度不可能是________。
A. 1 = 14.20 , 2 = 12.50 , 3 = 15.00
B. 1 = 13.00 , 2 = 11.20 , 3 = 11.40
C. 1 = 12.00 , 2 = 11.50 , 3 = 11.50
(3)(单选)在某次实验中,三根橡皮筋的方向如图乙所示,保持结点 的位置与 段橡皮筋长度、方向不变,
保持 段橡皮筋的方向不变,将 段橡皮筋缓慢逆时针旋转45°,则在此过程中 段与 段橡皮筋的弹力
大小变化正确的是________。
A. 段橡皮筋弹力先减小后增大
B. 段橡皮筋弹力一直减小
C. 段橡皮筋弹力先增大后减小
D. 段橡皮筋弹力一直增大
14.“探究加速度与力、质量的关系”的实验装置如图甲所示。小车后面固定一条纸带,穿过电火花打点计
时器,细线一端连着小车,另一端绕过光滑的定滑轮和质量不计的动滑轮与挂在竖直平面内的拉力传感器
相连,拉力传感器用于测小车受到拉力的大小。
(1)实验中__________(填写“需要”或“不需要”)满足所挂钩码质量远小于小车质量。
第 5 页,共 12 页
(2)若某同学实验过程中忘记了平衡摩擦力,其他操作都正确,则他所得到的小车 关系图像应是下图中
的___________(图中纵坐标表示小车的加速度 ,横坐标表示细线对小车的拉力 )。
A. .
C. .
(3)某小组在实验中打出的纸带如图乙所示,图中相邻两计数点间还有4个点未画出,打点计时器使用的交
流电源的频率为50 。则小车的加速度大小为__________ / 2(结果保留两位有效数字)。
(4)若所有操作都正确,现测得小车的质量为 ,小车的加速度为 ,当地重力加速度为 ,则钩码的总质量
=__________(用 、 、 表示)。
四、计算题:本大题共 4 小题,共 42 分。
15.随着科技的普及和推广,消费者对于新技术和新设备的接受度逐渐提高。如图所示的送餐机器人作为一
种新颖的服务方式,吸引了不少消费者的注意力。它通过先进的导航技术和多传感器系统,能够自主避障,
实现快速准确的送餐服务。若餐具与机器人水平托盘之间的动摩擦因数 = 0.75,机器人的速度不超过
1.5 / ,现让机器人从静止启动沿水平方向做匀加速直线运动。餐具与水平托盘间的最大静摩擦力等于滑
动摩擦力,取 = 10 / 2。求:
第 6 页,共 12 页
(1)机器人送餐过程的最大加速度是多少?
(2)机器人加速至最大速度的最小位移是多少?
16.如图所示,倾角为37°、质量为15 0的斜面体 放在水平面上,质量为5 0的重物 放在斜面 上,质量
为 0的重物 与重物 通过细绳相连于 点,其中细绳 处于水平状态,另一根与 点相连的细绳悬挂于天
花板上且与竖直方向夹角为37°, 、 、 都处于静止状态。已知重力加速度大小为 , 37° = 0.6, 37° =
0.8。求:
(1)水平细绳 的拉力;
(2)斜面 对重物 的摩擦力;
(3)地面对斜面 的支持力。
17.近些年来,国家大力发展低空经济,无人机的应用越来越广泛。质量为5 的轻型无人机悬停在距离地
面高度为77.5 的空中,由于突发故障,动力突然消失致使无人机自由下落,2 后动力装置恢复正常,可
提供竖直向上的升力。
已知无人机着地速度不能超过3 / ,不计空气阻力,重力加速度 取10 / 2。求:
(1)动力装置恢复正常时无人机距离地面的高度;
(2)动力装置所提供的升力至少多大;
(3)若动力装置恢复正常后提供的竖直升力为80 ,则升力作用5 后无人机距离地面的高度是多少?
18.现代化的工厂车间通常采用流水线生产作业,如图所示是某流水线一部分的示意图:光滑的水平面上有
一固定光滑平台,平台左侧静置一质量 1 = 0.5 的运输平板小车,小车上表面与平台等高。平台右侧紧
贴一传送带,传送带与水平面成 = 30 角。某次操作工人进行测试时,让传送带以速度 = 0.5 / 顺时针
稳定运行,然后再让质量 2 = 1.0 的小工件(视为质点)从小车的左端以某一初速度 0向右滑上小车,发
第 7 页,共 12 页
现当工件滑至小车最右端时,恰好与小车达到共同速度 1 = 2.0 / ,此后当小车与平台相撞后,工件保持
√ 3
速度大小不变经平台滑上传送带。已知工件与传送带间的动摩擦因数 = ,工件从平台转至传送带时速
6
度大小保持不变,传送带足够长,取 = 10 / 2。求:
(1)工件滑上小车时初速度 0的大小;
(2)工件在传送带上运动的时间 ;(结果可保留根号)
(3)若工件在传送带上相对滑动时会留下划痕,则传送带上的划痕为多长。(结果可保留根号)
第 8 页,共 12 页
1.【答案】
2.【答案】
3.【答案】
4.【答案】
5.【答案】
6.【答案】
7.【答案】
8.【答案】
9.【答案】
10.【答案】
11.【答案】
12.【答案】
13.【答案】(1)三根橡皮筋的方向;(2) ;(3) 。
14.【答案】(1)不需要
(2)
(3)2.0
4
(4)
2
15.【答案】解:(1)设餐具及食物质量为 ,当它们与机器人托盘之间的摩擦力达到最大静摩擦力时,机器
人送餐过程的加速度最大,
根据牛顿第二定律有 = ,
可求得 2 = 7.5 / 。
(2)根据匀变速直线运动规律知,当机器人以最大加速度加速时位移最小,
则加速阶段有 2 = 2 ,
代入数据求得 = 0.15 。
第 9 页,共 12 页
16.【答案】解:(1)对 点进行受力分析,可知 受到 的拉力, 的拉力以及左侧绳子的拉力,受力如图
根据平衡条件可得 1 = tan37
0,
解得 1 = 0.75 0 。
(2)物体 受到重力、斜面支持力、绳子的拉力以及斜面的摩擦力,受力如图
沿斜面的方向 sin37
+ 1cos37
= ,
垂直斜面方向 + 1 37° = 37°,
解得 = 3.55 0 , = 3.6 0 。
(3)斜面 受到重力、地面的支持力、 对 的压力以及 对 的摩擦力,地面对 的摩擦力,受力如图
第 10 页,共 12 页
根据牛顿第三定律 = ′ , = ′ ,
竖直方向 = + cos37 + sin37 ,
解得 = 20 0 .
1
17.【答案】解:(1)自由下落的高度 21 = 1, 2
下落2 时距离地面的高度 2 = 1 = 57.5 。
(2)自由下落,过了2 后的速度 1 = 1,
恢复正常操控后向下匀减速直线运动的过程中(选向下为正方向) 2 20 1 = 2 1 2,
1 = 1,
联立可求得: 1 = 67 。
(3)无人机动力系统提供的作用力为80 时 2 = 2,
1
5 内下落高度 3 = 1
2
2 , 2 2 2
此时距离地面的高度 ′ = 2 3 = 32.5 。
18.【答案】(1)设工件与小车上表面间的动摩擦因数为 0 ,对工件根据牛顿第二定律有
0 2 = 2 2
根据速度与时间公式有
1 = 0 2 0
对小车根据牛顿第二定律有
0 2 = 1 1
1 = 1 0
第 11 页,共 12 页
联立解得
0 = 3 /
(2)当工件速度大于传送带的速度,减速到与传送带同速的过程:
2 cos + 2 sin = 2 3
= 1 3 1
+ 1
1 = 1 2
当工件速度小于传送带的速度,向上减速到零的过程:
2 sin 2 cos = 2 4
0 = 4 2
2 = 2 2
工件下滑过程
1
1 + 2 =
2
4 3 2
工件在传送带上运动总时间
= 1 + 2 + 3 = (0.4 + 0.2√ 6)
(3)当工件速度大于传送带的速度,工件相对传送带向上
1 = 1 1
当工件速度小于传送带的速度,工件相对传送带向下
2 = 2 2
工件向下运动过程中
3 = 1 + 2 + 3
综上所述划痕总长为
= 2 + 3 = (0.35 + 0.1√ 6)
第 12 页,共 12 页
一、单选题:本大题共 8 小题,共 24 分。
1.2024年8月1日凌晨,在巴黎奥运会游泳项目男子100米自由泳决赛中,中国选手潘展乐以46秒40的成绩
夺得冠军,并打破世界纪录。比赛中,他表现出了惊人的爆发力、世界顶尖的半程转身技术和稳定的冲刺
能力。国际标准游泳池长度为50 。下列说法中正确的是
A. 项目的100米是指运动员位移的大小 B. 比赛成绩46秒40是指他夺冠的那一时刻
C. 研究他的转身技术时不可以把他看作质点 D. 冲刺阶段他的惯性随着速度增大而变大
2.如图所示,将小球从 点竖直向下抛出,小球落地后竖直反弹回 点不再上升,不计空气阻力,下列说法
正确的是
A. 小球下落过程中,加速度方向向下 B. 小球上升过程中,加速度方向向上
C. 小球下落过程中,加速度越来越大 D. 小球上升过程中,加速度越来越小
3.如图甲、乙所示, , 两球均保持静止。甲图中两球靠在一起放在水平地面上,乙图中 球用轻绳拴住
并悬挂在竖直墙上, 球在水平地面上。已知所有接触面均光滑,关于两球受力情况下列说法中正确的是
A. 两图中 球均受三个力
B. 两图中 球受到地面的支持力均等于它的重力
C. 图甲中 球对地面的压力就是它的重力
D. 图乙中 球受到 球的弹力是因为 球产生形变
第 1 页,共 12 页
4.某司机驾驶汽车正以20 / 的速度行驶,在距离人行横道停车线48 处看到有行人通行,司机经过一定
反应时间后采取制动措施。制动后,汽车以5 / 2的加速度做匀减速直线运动。为了在停车线前停车,该
司机的反应时间不应超过
A. 0.5 B. 0.4 C. 0.3 D. 0.2
5. 两物体同时开始沿直线运动, 物体的位移—时间图像和 物体的速度—时间图像分别如图甲、图乙所
示,下列说法正确的是( )
A. 0 3 内, 物体做单向直线运动
B. 0 3 内, 物体做单向直线运动
C. 2 4 内, 物体位移大小为零
D. 2 4 内, 物体平均速度大小为4 /
6.如图甲所示,质量为0.4 的物块在水平力 的作用下由静止释放,物块与足够高的竖直墙面间的动摩擦
因数为0.4,力 随时间 变化的关系图像如图乙所示,最大静摩擦力等于滑动摩擦力,取重力加速度大小 =
10 / 2,下列说法正确的是
A. = 2 前物块一直做加速运动 B. = 2 后物块受静摩擦力
C. = 2 时物块离出发点最远 D. 物块受到的摩擦力的最大值等于4
7.如图所示,三根不可伸长的轻质细绳一端拴在同一结点 上, 绳另一端固定在右侧竖直墙面上, 绳
另一端拴接一砖块, 绳跨过左侧光滑定滑轮拴接一相同砖块,整个装置处于静止状态。测出 绳与竖直
第 2 页,共 12 页
墙面的夹角为 = 55°,则结点 左侧绳与竖直方向的夹角 为
A. 45° B. 55° C. 60° D. 70°
8.甲、乙两车(均可视为质点)在平直公路上沿两平行车道同向直线行驶,两车运动的 图像如图所示( 为
位移)。已知 = 0时乙车在甲车前面8 处,下列说法正确的是
A. 2 后甲车超过乙车 B. 两车在 = 2 时速度相等
C. 两车相距最近距离为6.5 D. 甲车的加速度大小为0.5 / 2
二、多选题:本大题共 4 小题,共 20 分。
9.在物理学研究过程中,科学家们创造了许多重要的物理学研究方法,高一上学期我们学习了理想实验法、
控制变量法、微元法、极限思想法和理想模型法等,以下关于物理学研究方法的叙述正确的是
A. 在研究合力和分力的关系时,采用了极限思想法
B. 著名的伽利略斜面实验,应用了理想实验的方法
C. 忽略物体的大小和形状,用质点代替物体,采用了等效替代法
D. 探究加速度 和合外力 、质量 关系的实验,主要应用了控制变量法
10.一个物体做匀变速直线运动,物体的位置随时间变化的函数关系是 = 2 2 + 4 + 5( ),则根据此函数
式可以得到
A. 物体的初速度大小为4 / B. 物体的加速度大小为2 / 2
C. 物体第2秒内的位移大小为16 D. 物体前4秒内的位移大小为48
第 3 页,共 12 页
11.某物体从足够高处由静止开始下落,下落过程中受到的空气阻力随速度增大而增大,其加速度 随时间
变化的关系图像如图所示,已知该物体质量 = 2 ,重力加速度 = 10 / 2,下列说法正确的是
A. 物体先做加速运动再做减速运动 B. 2 时物体所受阻力大小为10
C. 物体下落过程中最大速度为20 / D. 0 4 内物体的平均速度等于10 /
12.如图所示, , 两小球分别用一轻弹簧 和轻质细线 悬挂在天花板上,轻弹簧 和轻质细线 与水平方
向的夹角分别为30°和53°, , 两小球间拴接的轻弹簧 劲度系数是轻弹簧 的劲度系数的3倍且恰好处于
水平状态。设重力加速度为 ,已知 53° = 0.8, 53° = 0.6,则
A. 轻弹簧 和轻质细线 的拉力大小之比为√ 3 ∶ 5
B. 轻弹簧 和轻弹簧 的形变量之比为2√ 3 ∶ 1
C. 、 两小球的质量之比为√ 3 ∶ 4
4
D. 剪断轻质细绳 的瞬间,小球 的瞬时加速度大小为
3
三、实验题:本大题共 2 小题,共 14 分。
13.某物理兴趣小组利用三根完全相同、满足胡克定律的橡皮筋进行“验证力的平行四边形定则”实验(橡
皮筋的形变均在弹性限度内)。如图甲所示,在水平木板上固定一张白纸,将三根橡皮筋的一端系在同一结
点 上,小组同学互相配合,沿三个不同方向用力拉这三根橡皮筋的另一端。已知橡皮筋原长均为10.00 。
(1)当三根橡皮筋稳定时,需在白纸上标记结点 的位置,测量三根橡皮筋的长度,还要记录
________________。
第 4 页,共 12 页
(2)(单选)当结点静止时,三根橡皮筋的长度不可能是________。
A. 1 = 14.20 , 2 = 12.50 , 3 = 15.00
B. 1 = 13.00 , 2 = 11.20 , 3 = 11.40
C. 1 = 12.00 , 2 = 11.50 , 3 = 11.50
(3)(单选)在某次实验中,三根橡皮筋的方向如图乙所示,保持结点 的位置与 段橡皮筋长度、方向不变,
保持 段橡皮筋的方向不变,将 段橡皮筋缓慢逆时针旋转45°,则在此过程中 段与 段橡皮筋的弹力
大小变化正确的是________。
A. 段橡皮筋弹力先减小后增大
B. 段橡皮筋弹力一直减小
C. 段橡皮筋弹力先增大后减小
D. 段橡皮筋弹力一直增大
14.“探究加速度与力、质量的关系”的实验装置如图甲所示。小车后面固定一条纸带,穿过电火花打点计
时器,细线一端连着小车,另一端绕过光滑的定滑轮和质量不计的动滑轮与挂在竖直平面内的拉力传感器
相连,拉力传感器用于测小车受到拉力的大小。
(1)实验中__________(填写“需要”或“不需要”)满足所挂钩码质量远小于小车质量。
第 5 页,共 12 页
(2)若某同学实验过程中忘记了平衡摩擦力,其他操作都正确,则他所得到的小车 关系图像应是下图中
的___________(图中纵坐标表示小车的加速度 ,横坐标表示细线对小车的拉力 )。
A. .
C. .
(3)某小组在实验中打出的纸带如图乙所示,图中相邻两计数点间还有4个点未画出,打点计时器使用的交
流电源的频率为50 。则小车的加速度大小为__________ / 2(结果保留两位有效数字)。
(4)若所有操作都正确,现测得小车的质量为 ,小车的加速度为 ,当地重力加速度为 ,则钩码的总质量
=__________(用 、 、 表示)。
四、计算题:本大题共 4 小题,共 42 分。
15.随着科技的普及和推广,消费者对于新技术和新设备的接受度逐渐提高。如图所示的送餐机器人作为一
种新颖的服务方式,吸引了不少消费者的注意力。它通过先进的导航技术和多传感器系统,能够自主避障,
实现快速准确的送餐服务。若餐具与机器人水平托盘之间的动摩擦因数 = 0.75,机器人的速度不超过
1.5 / ,现让机器人从静止启动沿水平方向做匀加速直线运动。餐具与水平托盘间的最大静摩擦力等于滑
动摩擦力,取 = 10 / 2。求:
第 6 页,共 12 页
(1)机器人送餐过程的最大加速度是多少?
(2)机器人加速至最大速度的最小位移是多少?
16.如图所示,倾角为37°、质量为15 0的斜面体 放在水平面上,质量为5 0的重物 放在斜面 上,质量
为 0的重物 与重物 通过细绳相连于 点,其中细绳 处于水平状态,另一根与 点相连的细绳悬挂于天
花板上且与竖直方向夹角为37°, 、 、 都处于静止状态。已知重力加速度大小为 , 37° = 0.6, 37° =
0.8。求:
(1)水平细绳 的拉力;
(2)斜面 对重物 的摩擦力;
(3)地面对斜面 的支持力。
17.近些年来,国家大力发展低空经济,无人机的应用越来越广泛。质量为5 的轻型无人机悬停在距离地
面高度为77.5 的空中,由于突发故障,动力突然消失致使无人机自由下落,2 后动力装置恢复正常,可
提供竖直向上的升力。
已知无人机着地速度不能超过3 / ,不计空气阻力,重力加速度 取10 / 2。求:
(1)动力装置恢复正常时无人机距离地面的高度;
(2)动力装置所提供的升力至少多大;
(3)若动力装置恢复正常后提供的竖直升力为80 ,则升力作用5 后无人机距离地面的高度是多少?
18.现代化的工厂车间通常采用流水线生产作业,如图所示是某流水线一部分的示意图:光滑的水平面上有
一固定光滑平台,平台左侧静置一质量 1 = 0.5 的运输平板小车,小车上表面与平台等高。平台右侧紧
贴一传送带,传送带与水平面成 = 30 角。某次操作工人进行测试时,让传送带以速度 = 0.5 / 顺时针
稳定运行,然后再让质量 2 = 1.0 的小工件(视为质点)从小车的左端以某一初速度 0向右滑上小车,发
第 7 页,共 12 页
现当工件滑至小车最右端时,恰好与小车达到共同速度 1 = 2.0 / ,此后当小车与平台相撞后,工件保持
√ 3
速度大小不变经平台滑上传送带。已知工件与传送带间的动摩擦因数 = ,工件从平台转至传送带时速
6
度大小保持不变,传送带足够长,取 = 10 / 2。求:
(1)工件滑上小车时初速度 0的大小;
(2)工件在传送带上运动的时间 ;(结果可保留根号)
(3)若工件在传送带上相对滑动时会留下划痕,则传送带上的划痕为多长。(结果可保留根号)
第 8 页,共 12 页
1.【答案】
2.【答案】
3.【答案】
4.【答案】
5.【答案】
6.【答案】
7.【答案】
8.【答案】
9.【答案】
10.【答案】
11.【答案】
12.【答案】
13.【答案】(1)三根橡皮筋的方向;(2) ;(3) 。
14.【答案】(1)不需要
(2)
(3)2.0
4
(4)
2
15.【答案】解:(1)设餐具及食物质量为 ,当它们与机器人托盘之间的摩擦力达到最大静摩擦力时,机器
人送餐过程的加速度最大,
根据牛顿第二定律有 = ,
可求得 2 = 7.5 / 。
(2)根据匀变速直线运动规律知,当机器人以最大加速度加速时位移最小,
则加速阶段有 2 = 2 ,
代入数据求得 = 0.15 。
第 9 页,共 12 页
16.【答案】解:(1)对 点进行受力分析,可知 受到 的拉力, 的拉力以及左侧绳子的拉力,受力如图
根据平衡条件可得 1 = tan37
0,
解得 1 = 0.75 0 。
(2)物体 受到重力、斜面支持力、绳子的拉力以及斜面的摩擦力,受力如图
沿斜面的方向 sin37
+ 1cos37
= ,
垂直斜面方向 + 1 37° = 37°,
解得 = 3.55 0 , = 3.6 0 。
(3)斜面 受到重力、地面的支持力、 对 的压力以及 对 的摩擦力,地面对 的摩擦力,受力如图
第 10 页,共 12 页
根据牛顿第三定律 = ′ , = ′ ,
竖直方向 = + cos37 + sin37 ,
解得 = 20 0 .
1
17.【答案】解:(1)自由下落的高度 21 = 1, 2
下落2 时距离地面的高度 2 = 1 = 57.5 。
(2)自由下落,过了2 后的速度 1 = 1,
恢复正常操控后向下匀减速直线运动的过程中(选向下为正方向) 2 20 1 = 2 1 2,
1 = 1,
联立可求得: 1 = 67 。
(3)无人机动力系统提供的作用力为80 时 2 = 2,
1
5 内下落高度 3 = 1
2
2 , 2 2 2
此时距离地面的高度 ′ = 2 3 = 32.5 。
18.【答案】(1)设工件与小车上表面间的动摩擦因数为 0 ,对工件根据牛顿第二定律有
0 2 = 2 2
根据速度与时间公式有
1 = 0 2 0
对小车根据牛顿第二定律有
0 2 = 1 1
1 = 1 0
第 11 页,共 12 页
联立解得
0 = 3 /
(2)当工件速度大于传送带的速度,减速到与传送带同速的过程:
2 cos + 2 sin = 2 3
= 1 3 1
+ 1
1 = 1 2
当工件速度小于传送带的速度,向上减速到零的过程:
2 sin 2 cos = 2 4
0 = 4 2
2 = 2 2
工件下滑过程
1
1 + 2 =
2
4 3 2
工件在传送带上运动总时间
= 1 + 2 + 3 = (0.4 + 0.2√ 6)
(3)当工件速度大于传送带的速度,工件相对传送带向上
1 = 1 1
当工件速度小于传送带的速度,工件相对传送带向下
2 = 2 2
工件向下运动过程中
3 = 1 + 2 + 3
综上所述划痕总长为
= 2 + 3 = (0.35 + 0.1√ 6)
第 12 页,共 12 页
同课章节目录