四川省绵阳中学2024-2025学年高一(上)期末物理试卷B(含解析)
文档属性
| 名称 | 四川省绵阳中学2024-2025学年高一(上)期末物理试卷B(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 307.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-02-07 00:00:00 | ||
图片预览

文档简介
四川省绵阳中学2024-2025学年高一(上)期末物理试卷B
一、单选题:本大题共8小题,共32分。
1.年月日点分,嫦娥五号上升器成功与轨返组合体交会对接,并于点分将样品容器安全转移至返回器中。下列说法正确的是( )
A. 点分和点分是时间
B. 上升器与轨返组合体交会对接时可以将上升器看成质点
C. 对接成功后,组合体绕月球运动一圈后又返回到原位置,其位移为零,路程不为零
D. 将样品容器安全转移至返回器过程中,样品容器的惯性会减小
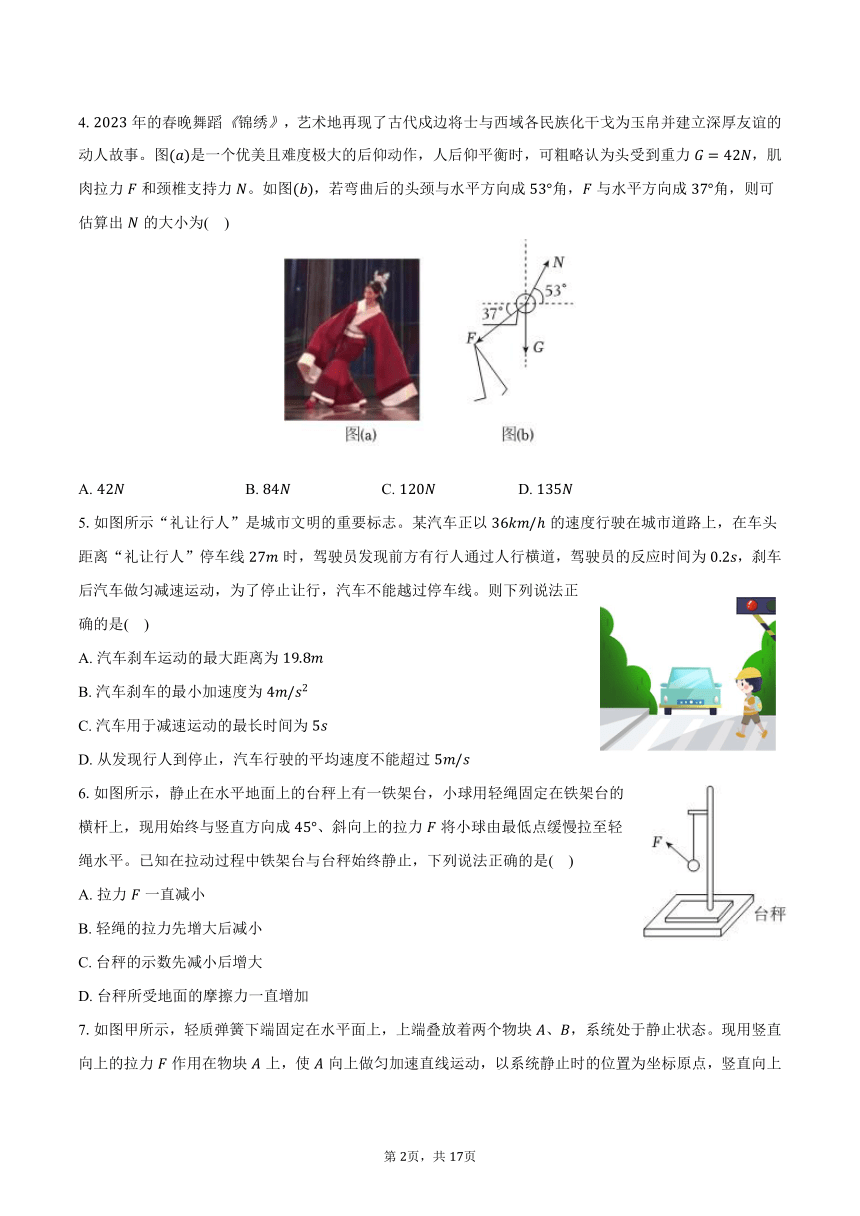
2.某同学站在力的传感器上连续完成多次下蹲起立。某时刻作为计时起点,传感器与计算机连接,经计算机处理后得到力的传感器示数随时间变化的情况如图所示。已知该同学质量,重力加速度。下列说法正确的是( )
A. 完成了两次下蹲过程
B. 该同学向下的最大加速度约为
C. 该同学向上的最大加速度约为
D. 该同学向下速度达到最大
3.如图一只小鸟落在了树枝上,树枝发生了弯曲,小鸟处于静止状态,下列说法正确的是( )
A. 树枝发生了弯曲,是因为小鸟对树枝的压力大于树枝对小鸟的支持力
B. 树枝对小鸟的支持力是由树枝发生形变产生的
C. 树枝对小鸟作用力的方向斜向上偏右
D. 小鸟起飞瞬间,翅膀对空气的作用力大于空气对翅膀的作用力
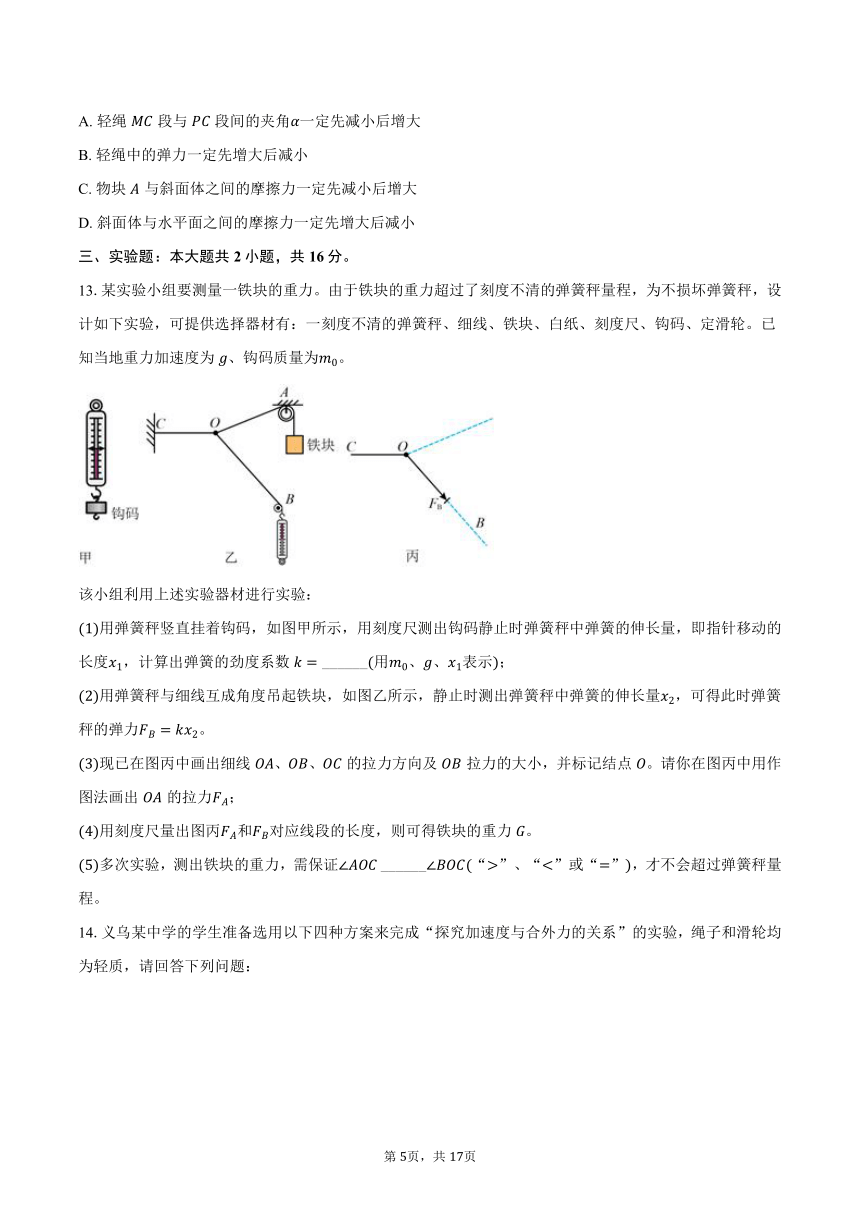
4.年的春晚舞蹈锦绣,艺术地再现了古代戍边将士与西域各民族化干戈为玉帛并建立深厚友谊的动人故事。图是一个优美且难度极大的后仰动作,人后仰平衡时,可粗略认为头受到重力,肌肉拉力和颈椎支持力。如图,若弯曲后的头颈与水平方向成角,与水平方向成角,则可估算出的大小为( )
A. B. C. D.
5.如图所示“礼让行人”是城市文明的重要标志。某汽车正以的速度行驶在城市道路上,在车头距离“礼让行人”停车线时,驾驶员发现前方有行人通过人行横道,驾驶员的反应时间为,刹车后汽车做匀减速运动,为了停止让行,汽车不能越过停车线。则下列说法正确的是( )
A. 汽车刹车运动的最大距离为
B. 汽车刹车的最小加速度为
C. 汽车用于减速运动的最长时间为
D. 从发现行人到停止,汽车行驶的平均速度不能超过
6.如图所示,静止在水平地面上的台秤上有一铁架台,小球用轻绳固定在铁架台的横杆上,现用始终与竖直方向成、斜向上的拉力将小球由最低点缓慢拉至轻绳水平。已知在拉动过程中铁架台与台秤始终静止,下列说法正确的是( )
A. 拉力一直减小
B. 轻绳的拉力先增大后减小
C. 台秤的示数先减小后增大
D. 台秤所受地面的摩擦力一直增加
7.如图甲所示,轻质弹簧下端固定在水平面上,上端叠放着两个物块、,系统处于静止状态。现用竖直向上的拉力作用在物块上,使向上做匀加速直线运动,以系统静止时的位置为坐标原点,竖直向上为位移正方向,得到随的变化图像如图乙所示。已知物块的质量,重力加速度,则下列说法正确的是( )
A. 物块的质量为
B. 物块做匀加速直线运动的加速度大小为
C. 作用瞬间,、之间的弹力大小为
D. 弹簧的劲度系数为
8.A、两物体同时受到同样的水平拉力后,分别在水平面上从静止开始做匀加速直线运动,后,同时撤去拉力,它们均做匀减速直线运动,直到停止,其图像如图所示,重力加速度取。在、整个运动过程中,下列说法正确的是( )
A. A、两物体质量之比为:
B. A、两物体受到摩擦力之比为:
C. A、两物体位移之比为:
D. A、两物体与水平面间动摩擦因数之比为:
二、多选题:本大题共4小题,共16分。
9.越野车和自动驾驶车沿同一公路上向东行驶,自动驾驶车由静止开始运动时,越野车刚好以速度从旁边加速驶过,如图所示分别为越野车和自动驾驶车的图线,根据这些信息,可以判断( )
A. 末两车速度均为
B. 时刻之后,两车会相遇两次
C. 末两车相遇
D. 加速阶段自动驾驶车的加速度是越野车的倍
10.如图所示,质量为的滑块在水平面上撞向弹簧,当滑块将弹簧压缩了时速度减小到零,然后滑块又被弹簧向右弹开。已知弹簧的劲度系数为,滑块与水平面间的动摩擦因数为,弹簧与水平面间的摩擦不计,重力加速度为,整个过程中弹簧未超过其弹性限度,则下列判断正确的是( )
A. 滑块向右运动的过程中,先做加速运动,离开弹簧后才做减速运动
B. 滑块与弹簧接触过程中的最大加速度为
C. 滑块向左运动的过程中,始终做减速运动
D. 滑块向右运动的过程中,当弹簧形变量时,滑块的速度最大
11.如图甲所示,倾斜的传送带正以恒定速率沿顺时针方向转动,传送带的倾角为。一物块以初速度从传送带的底部冲上传送带并沿传送带向上运动,其运动的图像如图乙所示,物块到传送带顶端时速度恰好为零,,,取,则( )
A. 传送带的速度为
B. 摩擦力方向一直与物块运动的方向相反
C. 物块与传送带间的动摩擦因数为
D. 传送带转动的速率越大,物块到达传送带顶端时的速度就会越大
12.如图所示,一个光滑大圆环竖直固定,其水平直径左端固定有一光滑小圆环,一轻绳跨过小圆环后左端与物块相连,右端系于大圆环上的点。将物块置于静止在粗糙水平面上的粗糙斜面体上,轻绳段与斜面平行,将悬挂有重物的光滑轻质动滑轮置于轻绳段上,稳定后,整个系统处于静止状态。现将轻绳右端从点沿大圆环缓慢移至下方关于直径对称的点,斜面体与物块始终保持静止状态,则在此过程中( )
A. 轻绳段与段间的夹角一定先减小后增大
B. 轻绳中的弹力一定先增大后减小
C. 物块与斜面体之间的摩擦力一定先减小后增大
D. 斜面体与水平面之间的摩擦力一定先增大后减小
三、实验题:本大题共2小题,共16分。
13.某实验小组要测量一铁块的重力。由于铁块的重力超过了刻度不清的弹簧秤量程,为不损坏弹簧秤,设计如下实验,可提供选择器材有:一刻度不清的弹簧秤、细线、铁块、白纸、刻度尺、钩码、定滑轮。已知当地重力加速度为、钩码质量为。
该小组利用上述实验器材进行实验:
用弹簧秤竖直挂着钩码,如图甲所示,用刻度尺测出钩码静止时弹簧秤中弹簧的伸长量,即指针移动的长度,计算出弹簧的劲度系数 ______用、、表示;
用弹簧秤与细线互成角度吊起铁块,如图乙所示,静止时测出弹簧秤中弹簧的伸长量,可得此时弹簧秤的弹力。
现已在图丙中画出细线、、的拉力方向及拉力的大小,并标记结点。请你在图丙中用作图法画出的拉力;
用刻度尺量出图丙和对应线段的长度,则可得铁块的重力。
多次实验,测出铁块的重力,需保证 ______“”、“”或“”,才不会超过弹簧秤量程。
14.义乌某中学的学生准备选用以下四种方案来完成“探究加速度与合外力的关系”的实验,绳子和滑轮均为轻质,请回答下列问题:
四种方案中,需要进行“补偿阻力”的方案是______选填甲、乙、丙、丁。
四种方案中,需要满足重物或钩码质量远小于小车的质量的方案是______选填甲、乙、丙、丁。
某一小组同学用图乙的装置进行实验,得到如图所示的一条纸带相邻两计数点间还有四个点没有画出,已知打点计时器使用的是频率为的交流电。根据纸带可求出小车在点的瞬时速度为______,加速度为______计算结果保留三位有效数字。
另一组学生用图乙的装置测量小车的质量,及小车与木板的动摩擦因数,通过增减悬挂钩码的数目进行多次实验,通过分析纸带求出相应实验时小车的加速度,得到多组拉力传感器示数和小车加速度的数据,作出如图所示的图像。由图像可求得小车的质量 ______,小车与长木板间的动摩擦因数 ______计算结果保留位有效数字。
四、计算题:本大题共3小题,共36分。
15.如图所示,重力为的物块甲通过三段轻绳悬挂,三段轻绳的结点为,轻绳平行于倾角为的斜面,且端与放置在斜面上的重力为的物块乙相连,轻绳与竖直方向的夹角也为,物块甲、乙都处于静止状态,求:
轻绳、上的拉力大小、;
物块乙所受的摩擦力。
16.大雾天气,有甲、乙两车在同一平直车道上匀速行驶,甲车在后速度为,乙车在前速度为,某时刻甲车车头与乙车车尾间的距离为,此时乙车突然以大小为的加速度刹车,经过时间甲车车头与乙车车尾间的距离减为,为了两车避免相撞,此时甲车也立即刹车做匀减速直线运动,求:
的值。
刹车后,甲车做匀减速直线运动的加速度至少多大?
17.质量的小物块,由静止从距斜面底端高的粗糙斜面上滑下,斜面倾角,小物块到达斜面底端后速度大小不变滑上足够长的长木板,小物块与斜面、长木板间的动摩擦因数均为,长木板与水平地面间的动摩擦因数为,长木板的质量,小物块滑上长木板立即受到大小的水平向右的恒力作用,当小物块与长木板速度相同时,撤去恒力,求:
小物块滑到斜面底端时的速度大小;
从滑上长木板开始,经多长时间物块、木板速度相同,此时物块距木板左端的距离;
最终木板距斜面末端的距离。
答案和解析
1.
【解析】、点分和点分分别指的两个时间点,都是时刻,故A错误;
B、上升器与轨返组合体交会对接时不能忽略上升器与轨返组合体的形状和大小,不能看成质点,故B错误;
C、位移是起点到终点的有向线段长,轨迹是物体实际路径,对接成功后,组合体绕月球运动一圈后又返回到原位置,其位移为零,路程不为零,故C正确;
D、惯性大小和物体的质量有关,将样品容器安全转移至返回器过程中,质量不变,惯性不变,故D错误。
故选:。
2.
【解析】由力的传感器示数随时间变化的情况图,知人的重力为,人完成一次下蹲动作,先加速向下后减速向下,人先失重后超重,即人完成一次下蹲动作,应先小于后大于,所以由图像可知内人只完成了一次下蹲过程,故A错误;
由力的传感器示数随时间变化的情况图知,在时最小为,此时该同学向下运动,合外力最大,加速度达最大,由于此时人的重力大于,人将继续向下加速,速度继续增大,在时达到最大,根据牛顿第二定律得人向下运动的最大加速度
故B正确,D错误;
C.由力的传感器示数随时间变化的情况图可知,在时最大为,此时该同学向下减速,向上的加速度达最大,有
故C错误。
故选:。
3.
【解析】解树枝发生了弯曲,是因为小鸟对树枝的压力使树枝反生了形变,故A错误;
B.树枝发生形变产生了树枝对小鸟的支持力,故B正确;
C.树枝对小鸟作用力和重力是一对平衡力,方向竖直向上,故C错误;
D.小鸟起飞瞬间,翅膀和空气的作用力是一对相互作用力,翅膀对空气的作用力等于空气对翅膀的作用力,故D错误。
故选:。
4.
【解析】根据图,对头部受力分析,头受到重力,肌肉拉力和颈椎支持力,正交分解,由平衡条件可知
代入,联立可得
,故ABD错误,C正确。
故选:。
5.
【解析】驾驶员的反应时间为,汽车正以的速度行驶,在内做匀速运动的位移为
则汽车刹车滑行的最大距离为
,解得
故A错误;
B.汽车刹车的最小加速度为
故B错误;
C.汽车用于减速运动的最长时间为
故C正确;
D.汽车从发现前方有行人通过人行横道到停下来过程的平均速度不高于以最小加速度刹车时全程的平均速度
故D错误。
故选:。
6.
【解析】用图解法,作出小球受力对应图像如下
由平行四边形定则和平衡条件可知,小球在上升的过程中,拉力一直增大,轻绳的拉力先减小后增大,故AB错误;
对整体受力分析如下
由平衡条件可知,增大时,铁架台受台秤的支持力逐渐减小,摩擦力逐渐增大,由牛顿第三定律可知,台秤的示数逐渐减小,台秤所受地面的摩擦力一直增大,故C错误,D正确。
故选:。
7.
【解析】、设物块质量为,静止时弹簧压缩量为,对、整体,由平衡条件得:
分离之前有,由牛顿第二定律得:
整理得:
图像的斜率等于劲度系数,故D错误;
、由图乙所示图像可知,当时,,对、整体,由牛顿第二定律得:
分离时,,对,由牛顿第二定律得:
代入数据解得:,,故A正确,B错误;
C、施加拉力的瞬间,设、之间的弹力为,对,由牛顿第二定律得:
代入数据解得:,故C错误。
故选:。
8.
【解析】D、撤去拉力后,两物体均做匀减速直线运动,对物体受力分析,由牛顿第二定律得:
解得
图像的斜率表示加速度,由图像得:
则、两物体与水平面间动摩擦因数之比为,故D错误;
A、,两物体均从静止开始做匀加速直线运动,对物体受力分析,由牛顿第二定律得:
解得,加速度为
由图像得:
则,
所以,故A错误;
B、、两物体受到摩擦力之比为,故B正确;
C、图像中,图像与坐标轴围成的面积表示位移,所以、两物体位移之比为,故C错误。
故选:。
9.
【解析】令的速度为,,,,根据越野车和自动驾驶车的图线可知
解得
故A正确;
B.由于图像与时间轴所围几何图形的面积表示位移,时刻两者并排在一起,可知,时刻两者位移相等,即时刻两者相遇,此时自动驾驶车开始做匀速直线运动,其速度大于越野车的速度,越野车做匀加速直线运动,时两者速度再一次相等,之后,越野车的速度大于自动驾驶车的速度,可知,两者一定还要相遇一次,即时刻之后,两车会相遇两次,故B正确;
C.时两者相遇,随后,自动驾驶车在越野车的前方,两者间距逐渐增大,时两者速度再一次相等,此时两者间距达到最大值,故C错误;
D.图像的斜率表示加速度,则加速阶段自动驾驶车与越野车的加速度分别为
,
可知,加速阶段自动驾驶车的加速度是越野车的倍,故D错误。
故选:。
10.
【解析】滑块向右滑动的过程中,以弹簧的弹力等于滑块所受到的滑动摩擦力时的位置为界,在该位置左侧时,弹簧弹力大于摩擦力,滑块做加速运动,在该位置右侧时,弹簧弹力小于滑动摩擦力,滑块做减速运动,故A错误;
B.当滑块将弹簧压缩了时速度减小到零,当弹簧弹力和摩擦力方向相同且弹簧弹力最大时,滑块的加速度最大,
则最大加速度为
故B错误;
C.滑块在向左滑动过程中,滑动摩擦力和弹簧弹力方向与运动方向相反,故滑块一直做减速运动,故C正确;
D.当弹簧弹力与滑动摩擦力大小相等,方向相反时,此时滑块加速度为零,速度最大,即
故D正确。
故选:。
11.
【解析】、由图乙所示图像可知,物块的初速度为,物块做匀减速直线运动,物块的加速度大小,
物块做匀减速直线运动,当物块的速度与传送带速度相等后,物块相对传送带向上滑动,摩擦力反向,继续做匀减速直线运动直到速度减为零,所以传送带的速度,故A正确;
、在内,物块的速度大于传送带速度,传送带对物块的摩擦力沿传送带向下,与物块运动的方向相反,
对物块,由牛顿第二定律得:
在内,物块的速度小于传送带速度,传送带对物块的摩擦力沿传送带向上,与物块运动的方向相同,
根据牛顿第二定律得:
代入数据解得:,故B错误,C正确;
D、若传送带的速度时,物块在传送带上一直做加速度大小为的匀减速直线运动,则
则物块的速度:,此时,无论传送带的速度为多大,物块到达传送带顶端时的速度都相等,故D错误。
故选:。
12.
【解析】设轻绳段长为,、两点间的水平距离为,由数学关系可得
将轻绳右端从点沿大圆环缓慢移至点过程中,不变,先增大后减小,所以先增大后减小,故A错误;
B.轻绳中的弹力记为,分析轻质动滑轮处的受力情况,有
由先增大后减小可知先增大后减小,故B正确;
C.由于斜面倾角及动摩擦因数未知,分析物块的受力情况,、的质量大小也未知,无法明确所受的摩擦力,故在轻绳中的弹力先增大后减小的过程中,的大小变化情况存在多种可能,故C错误;
D.设斜面体与水平面之间的摩擦力为,斜面倾角为,对物块和斜面体整体进行受力分析,正交分解后可得
由于不变、先增大后减小,所以先增大后减小,故D正确。
故选:。
13.
【解析】弹簧的劲度系数为
作图法画出如图所示
由数学知识可知只有满足,才能保证,才不会超过弹簧秤量程。
故答案为:;见详解;。
14.甲、乙、丙 丙
【解析】四种方案中,甲、乙、丙三个方案中小车均受到比较大的摩擦阻力作用,都需要进行“补偿阻力”,丁方案中由于滑块与气垫导轨间的摩擦力可以忽略不计,则不需要进行“补偿阻力”。故四种方案中,需要进行“补偿阻力”的方案是:甲、乙、丙。
四种方案中,甲方案可以通过弹簧测力计测得绳子拉力,乙、丁方案都可以通过力传感器测得绳子拉力,而丙方案需要用重物的重力近似等于绳子拉力,为了减小误差,丙方案需要满足重物质量远小于小车的质量。
相邻两计数点间还有四个点没有画出,可知相邻计数点时间间隔为
根据匀变速直线运动中间时刻速度等于该段过程的平均速度,则小车在点的瞬时速度为
根据逐差法有
以小车为对象,根据牛顿第二定律可得
可得
图像的斜率为
解得小车的质量为
纵轴截距为
解得
故答案为:甲、乙、丙;丙;;;;
15.对结点受力分析,受到三段轻绳的拉力,合力为零,如下图所示
根据平衡可得
,解得
,解得
乙物块处于静止状态,受力平衡,对乙受力分析,受到重力、斜面的支持力、绳的拉力以及静摩擦力,根据平衡条件可知,沿着斜面方向有
,解得
方向沿斜面向上。
答:轻绳上的拉力大小等于,上的拉力大小等于;
物块乙所受的摩擦力大小等于,方向沿斜面向上。
16.在时间内,甲、乙两车运动位移分别为
据题有
解得:
甲车开始刹车时,乙车速度为
若甲车刹车后经时间两车速度相等均为,两车恰好避免相撞,则
在时间内甲、乙两车运动位移分别为
又有
联立以上各式解得:
即甲车刹车加速度至少为。
答:的值为;
刹车后,甲车做匀减速直线运动的加速度至少为。
17.小物块滑到斜面底端过程中,根据动能定理可得
解得
从滑上长木板开始,经时间物块、木板速度相同,则对小物块研究
解得
对木板研究
解得
则
解得
此时物块距木板左端的距离为
由于木板与物块之间的滑动摩擦力大于木板与地面之间的滑动摩擦力,则共速后,二者一起做匀减速运动,则共速后,根据牛顿第二定律可得
解得
此过程中移动距离为
最终木板距斜面末端的距离为
答:小物块滑到斜面底端时的速度大小等于;
从滑上长木板开始,经时间物块、木板速度相同,此时物块距木板左端的距离等于;
最终木板距斜面末端的距离等于。
第14页,共17页
一、单选题:本大题共8小题,共32分。
1.年月日点分,嫦娥五号上升器成功与轨返组合体交会对接,并于点分将样品容器安全转移至返回器中。下列说法正确的是( )
A. 点分和点分是时间
B. 上升器与轨返组合体交会对接时可以将上升器看成质点
C. 对接成功后,组合体绕月球运动一圈后又返回到原位置,其位移为零,路程不为零
D. 将样品容器安全转移至返回器过程中,样品容器的惯性会减小
2.某同学站在力的传感器上连续完成多次下蹲起立。某时刻作为计时起点,传感器与计算机连接,经计算机处理后得到力的传感器示数随时间变化的情况如图所示。已知该同学质量,重力加速度。下列说法正确的是( )
A. 完成了两次下蹲过程
B. 该同学向下的最大加速度约为
C. 该同学向上的最大加速度约为
D. 该同学向下速度达到最大
3.如图一只小鸟落在了树枝上,树枝发生了弯曲,小鸟处于静止状态,下列说法正确的是( )
A. 树枝发生了弯曲,是因为小鸟对树枝的压力大于树枝对小鸟的支持力
B. 树枝对小鸟的支持力是由树枝发生形变产生的
C. 树枝对小鸟作用力的方向斜向上偏右
D. 小鸟起飞瞬间,翅膀对空气的作用力大于空气对翅膀的作用力
4.年的春晚舞蹈锦绣,艺术地再现了古代戍边将士与西域各民族化干戈为玉帛并建立深厚友谊的动人故事。图是一个优美且难度极大的后仰动作,人后仰平衡时,可粗略认为头受到重力,肌肉拉力和颈椎支持力。如图,若弯曲后的头颈与水平方向成角,与水平方向成角,则可估算出的大小为( )
A. B. C. D.
5.如图所示“礼让行人”是城市文明的重要标志。某汽车正以的速度行驶在城市道路上,在车头距离“礼让行人”停车线时,驾驶员发现前方有行人通过人行横道,驾驶员的反应时间为,刹车后汽车做匀减速运动,为了停止让行,汽车不能越过停车线。则下列说法正确的是( )
A. 汽车刹车运动的最大距离为
B. 汽车刹车的最小加速度为
C. 汽车用于减速运动的最长时间为
D. 从发现行人到停止,汽车行驶的平均速度不能超过
6.如图所示,静止在水平地面上的台秤上有一铁架台,小球用轻绳固定在铁架台的横杆上,现用始终与竖直方向成、斜向上的拉力将小球由最低点缓慢拉至轻绳水平。已知在拉动过程中铁架台与台秤始终静止,下列说法正确的是( )
A. 拉力一直减小
B. 轻绳的拉力先增大后减小
C. 台秤的示数先减小后增大
D. 台秤所受地面的摩擦力一直增加
7.如图甲所示,轻质弹簧下端固定在水平面上,上端叠放着两个物块、,系统处于静止状态。现用竖直向上的拉力作用在物块上,使向上做匀加速直线运动,以系统静止时的位置为坐标原点,竖直向上为位移正方向,得到随的变化图像如图乙所示。已知物块的质量,重力加速度,则下列说法正确的是( )
A. 物块的质量为
B. 物块做匀加速直线运动的加速度大小为
C. 作用瞬间,、之间的弹力大小为
D. 弹簧的劲度系数为
8.A、两物体同时受到同样的水平拉力后,分别在水平面上从静止开始做匀加速直线运动,后,同时撤去拉力,它们均做匀减速直线运动,直到停止,其图像如图所示,重力加速度取。在、整个运动过程中,下列说法正确的是( )
A. A、两物体质量之比为:
B. A、两物体受到摩擦力之比为:
C. A、两物体位移之比为:
D. A、两物体与水平面间动摩擦因数之比为:
二、多选题:本大题共4小题,共16分。
9.越野车和自动驾驶车沿同一公路上向东行驶,自动驾驶车由静止开始运动时,越野车刚好以速度从旁边加速驶过,如图所示分别为越野车和自动驾驶车的图线,根据这些信息,可以判断( )
A. 末两车速度均为
B. 时刻之后,两车会相遇两次
C. 末两车相遇
D. 加速阶段自动驾驶车的加速度是越野车的倍
10.如图所示,质量为的滑块在水平面上撞向弹簧,当滑块将弹簧压缩了时速度减小到零,然后滑块又被弹簧向右弹开。已知弹簧的劲度系数为,滑块与水平面间的动摩擦因数为,弹簧与水平面间的摩擦不计,重力加速度为,整个过程中弹簧未超过其弹性限度,则下列判断正确的是( )
A. 滑块向右运动的过程中,先做加速运动,离开弹簧后才做减速运动
B. 滑块与弹簧接触过程中的最大加速度为
C. 滑块向左运动的过程中,始终做减速运动
D. 滑块向右运动的过程中,当弹簧形变量时,滑块的速度最大
11.如图甲所示,倾斜的传送带正以恒定速率沿顺时针方向转动,传送带的倾角为。一物块以初速度从传送带的底部冲上传送带并沿传送带向上运动,其运动的图像如图乙所示,物块到传送带顶端时速度恰好为零,,,取,则( )
A. 传送带的速度为
B. 摩擦力方向一直与物块运动的方向相反
C. 物块与传送带间的动摩擦因数为
D. 传送带转动的速率越大,物块到达传送带顶端时的速度就会越大
12.如图所示,一个光滑大圆环竖直固定,其水平直径左端固定有一光滑小圆环,一轻绳跨过小圆环后左端与物块相连,右端系于大圆环上的点。将物块置于静止在粗糙水平面上的粗糙斜面体上,轻绳段与斜面平行,将悬挂有重物的光滑轻质动滑轮置于轻绳段上,稳定后,整个系统处于静止状态。现将轻绳右端从点沿大圆环缓慢移至下方关于直径对称的点,斜面体与物块始终保持静止状态,则在此过程中( )
A. 轻绳段与段间的夹角一定先减小后增大
B. 轻绳中的弹力一定先增大后减小
C. 物块与斜面体之间的摩擦力一定先减小后增大
D. 斜面体与水平面之间的摩擦力一定先增大后减小
三、实验题:本大题共2小题,共16分。
13.某实验小组要测量一铁块的重力。由于铁块的重力超过了刻度不清的弹簧秤量程,为不损坏弹簧秤,设计如下实验,可提供选择器材有:一刻度不清的弹簧秤、细线、铁块、白纸、刻度尺、钩码、定滑轮。已知当地重力加速度为、钩码质量为。
该小组利用上述实验器材进行实验:
用弹簧秤竖直挂着钩码,如图甲所示,用刻度尺测出钩码静止时弹簧秤中弹簧的伸长量,即指针移动的长度,计算出弹簧的劲度系数 ______用、、表示;
用弹簧秤与细线互成角度吊起铁块,如图乙所示,静止时测出弹簧秤中弹簧的伸长量,可得此时弹簧秤的弹力。
现已在图丙中画出细线、、的拉力方向及拉力的大小,并标记结点。请你在图丙中用作图法画出的拉力;
用刻度尺量出图丙和对应线段的长度,则可得铁块的重力。
多次实验,测出铁块的重力,需保证 ______“”、“”或“”,才不会超过弹簧秤量程。
14.义乌某中学的学生准备选用以下四种方案来完成“探究加速度与合外力的关系”的实验,绳子和滑轮均为轻质,请回答下列问题:
四种方案中,需要进行“补偿阻力”的方案是______选填甲、乙、丙、丁。
四种方案中,需要满足重物或钩码质量远小于小车的质量的方案是______选填甲、乙、丙、丁。
某一小组同学用图乙的装置进行实验,得到如图所示的一条纸带相邻两计数点间还有四个点没有画出,已知打点计时器使用的是频率为的交流电。根据纸带可求出小车在点的瞬时速度为______,加速度为______计算结果保留三位有效数字。
另一组学生用图乙的装置测量小车的质量,及小车与木板的动摩擦因数,通过增减悬挂钩码的数目进行多次实验,通过分析纸带求出相应实验时小车的加速度,得到多组拉力传感器示数和小车加速度的数据,作出如图所示的图像。由图像可求得小车的质量 ______,小车与长木板间的动摩擦因数 ______计算结果保留位有效数字。
四、计算题:本大题共3小题,共36分。
15.如图所示,重力为的物块甲通过三段轻绳悬挂,三段轻绳的结点为,轻绳平行于倾角为的斜面,且端与放置在斜面上的重力为的物块乙相连,轻绳与竖直方向的夹角也为,物块甲、乙都处于静止状态,求:
轻绳、上的拉力大小、;
物块乙所受的摩擦力。
16.大雾天气,有甲、乙两车在同一平直车道上匀速行驶,甲车在后速度为,乙车在前速度为,某时刻甲车车头与乙车车尾间的距离为,此时乙车突然以大小为的加速度刹车,经过时间甲车车头与乙车车尾间的距离减为,为了两车避免相撞,此时甲车也立即刹车做匀减速直线运动,求:
的值。
刹车后,甲车做匀减速直线运动的加速度至少多大?
17.质量的小物块,由静止从距斜面底端高的粗糙斜面上滑下,斜面倾角,小物块到达斜面底端后速度大小不变滑上足够长的长木板,小物块与斜面、长木板间的动摩擦因数均为,长木板与水平地面间的动摩擦因数为,长木板的质量,小物块滑上长木板立即受到大小的水平向右的恒力作用,当小物块与长木板速度相同时,撤去恒力,求:
小物块滑到斜面底端时的速度大小;
从滑上长木板开始,经多长时间物块、木板速度相同,此时物块距木板左端的距离;
最终木板距斜面末端的距离。
答案和解析
1.
【解析】、点分和点分分别指的两个时间点,都是时刻,故A错误;
B、上升器与轨返组合体交会对接时不能忽略上升器与轨返组合体的形状和大小,不能看成质点,故B错误;
C、位移是起点到终点的有向线段长,轨迹是物体实际路径,对接成功后,组合体绕月球运动一圈后又返回到原位置,其位移为零,路程不为零,故C正确;
D、惯性大小和物体的质量有关,将样品容器安全转移至返回器过程中,质量不变,惯性不变,故D错误。
故选:。
2.
【解析】由力的传感器示数随时间变化的情况图,知人的重力为,人完成一次下蹲动作,先加速向下后减速向下,人先失重后超重,即人完成一次下蹲动作,应先小于后大于,所以由图像可知内人只完成了一次下蹲过程,故A错误;
由力的传感器示数随时间变化的情况图知,在时最小为,此时该同学向下运动,合外力最大,加速度达最大,由于此时人的重力大于,人将继续向下加速,速度继续增大,在时达到最大,根据牛顿第二定律得人向下运动的最大加速度
故B正确,D错误;
C.由力的传感器示数随时间变化的情况图可知,在时最大为,此时该同学向下减速,向上的加速度达最大,有
故C错误。
故选:。
3.
【解析】解树枝发生了弯曲,是因为小鸟对树枝的压力使树枝反生了形变,故A错误;
B.树枝发生形变产生了树枝对小鸟的支持力,故B正确;
C.树枝对小鸟作用力和重力是一对平衡力,方向竖直向上,故C错误;
D.小鸟起飞瞬间,翅膀和空气的作用力是一对相互作用力,翅膀对空气的作用力等于空气对翅膀的作用力,故D错误。
故选:。
4.
【解析】根据图,对头部受力分析,头受到重力,肌肉拉力和颈椎支持力,正交分解,由平衡条件可知
代入,联立可得
,故ABD错误,C正确。
故选:。
5.
【解析】驾驶员的反应时间为,汽车正以的速度行驶,在内做匀速运动的位移为
则汽车刹车滑行的最大距离为
,解得
故A错误;
B.汽车刹车的最小加速度为
故B错误;
C.汽车用于减速运动的最长时间为
故C正确;
D.汽车从发现前方有行人通过人行横道到停下来过程的平均速度不高于以最小加速度刹车时全程的平均速度
故D错误。
故选:。
6.
【解析】用图解法,作出小球受力对应图像如下
由平行四边形定则和平衡条件可知,小球在上升的过程中,拉力一直增大,轻绳的拉力先减小后增大,故AB错误;
对整体受力分析如下
由平衡条件可知,增大时,铁架台受台秤的支持力逐渐减小,摩擦力逐渐增大,由牛顿第三定律可知,台秤的示数逐渐减小,台秤所受地面的摩擦力一直增大,故C错误,D正确。
故选:。
7.
【解析】、设物块质量为,静止时弹簧压缩量为,对、整体,由平衡条件得:
分离之前有,由牛顿第二定律得:
整理得:
图像的斜率等于劲度系数,故D错误;
、由图乙所示图像可知,当时,,对、整体,由牛顿第二定律得:
分离时,,对,由牛顿第二定律得:
代入数据解得:,,故A正确,B错误;
C、施加拉力的瞬间,设、之间的弹力为,对,由牛顿第二定律得:
代入数据解得:,故C错误。
故选:。
8.
【解析】D、撤去拉力后,两物体均做匀减速直线运动,对物体受力分析,由牛顿第二定律得:
解得
图像的斜率表示加速度,由图像得:
则、两物体与水平面间动摩擦因数之比为,故D错误;
A、,两物体均从静止开始做匀加速直线运动,对物体受力分析,由牛顿第二定律得:
解得,加速度为
由图像得:
则,
所以,故A错误;
B、、两物体受到摩擦力之比为,故B正确;
C、图像中,图像与坐标轴围成的面积表示位移,所以、两物体位移之比为,故C错误。
故选:。
9.
【解析】令的速度为,,,,根据越野车和自动驾驶车的图线可知
解得
故A正确;
B.由于图像与时间轴所围几何图形的面积表示位移,时刻两者并排在一起,可知,时刻两者位移相等,即时刻两者相遇,此时自动驾驶车开始做匀速直线运动,其速度大于越野车的速度,越野车做匀加速直线运动,时两者速度再一次相等,之后,越野车的速度大于自动驾驶车的速度,可知,两者一定还要相遇一次,即时刻之后,两车会相遇两次,故B正确;
C.时两者相遇,随后,自动驾驶车在越野车的前方,两者间距逐渐增大,时两者速度再一次相等,此时两者间距达到最大值,故C错误;
D.图像的斜率表示加速度,则加速阶段自动驾驶车与越野车的加速度分别为
,
可知,加速阶段自动驾驶车的加速度是越野车的倍,故D错误。
故选:。
10.
【解析】滑块向右滑动的过程中,以弹簧的弹力等于滑块所受到的滑动摩擦力时的位置为界,在该位置左侧时,弹簧弹力大于摩擦力,滑块做加速运动,在该位置右侧时,弹簧弹力小于滑动摩擦力,滑块做减速运动,故A错误;
B.当滑块将弹簧压缩了时速度减小到零,当弹簧弹力和摩擦力方向相同且弹簧弹力最大时,滑块的加速度最大,
则最大加速度为
故B错误;
C.滑块在向左滑动过程中,滑动摩擦力和弹簧弹力方向与运动方向相反,故滑块一直做减速运动,故C正确;
D.当弹簧弹力与滑动摩擦力大小相等,方向相反时,此时滑块加速度为零,速度最大,即
故D正确。
故选:。
11.
【解析】、由图乙所示图像可知,物块的初速度为,物块做匀减速直线运动,物块的加速度大小,
物块做匀减速直线运动,当物块的速度与传送带速度相等后,物块相对传送带向上滑动,摩擦力反向,继续做匀减速直线运动直到速度减为零,所以传送带的速度,故A正确;
、在内,物块的速度大于传送带速度,传送带对物块的摩擦力沿传送带向下,与物块运动的方向相反,
对物块,由牛顿第二定律得:
在内,物块的速度小于传送带速度,传送带对物块的摩擦力沿传送带向上,与物块运动的方向相同,
根据牛顿第二定律得:
代入数据解得:,故B错误,C正确;
D、若传送带的速度时,物块在传送带上一直做加速度大小为的匀减速直线运动,则
则物块的速度:,此时,无论传送带的速度为多大,物块到达传送带顶端时的速度都相等,故D错误。
故选:。
12.
【解析】设轻绳段长为,、两点间的水平距离为,由数学关系可得
将轻绳右端从点沿大圆环缓慢移至点过程中,不变,先增大后减小,所以先增大后减小,故A错误;
B.轻绳中的弹力记为,分析轻质动滑轮处的受力情况,有
由先增大后减小可知先增大后减小,故B正确;
C.由于斜面倾角及动摩擦因数未知,分析物块的受力情况,、的质量大小也未知,无法明确所受的摩擦力,故在轻绳中的弹力先增大后减小的过程中,的大小变化情况存在多种可能,故C错误;
D.设斜面体与水平面之间的摩擦力为,斜面倾角为,对物块和斜面体整体进行受力分析,正交分解后可得
由于不变、先增大后减小,所以先增大后减小,故D正确。
故选:。
13.
【解析】弹簧的劲度系数为
作图法画出如图所示
由数学知识可知只有满足,才能保证,才不会超过弹簧秤量程。
故答案为:;见详解;。
14.甲、乙、丙 丙
【解析】四种方案中,甲、乙、丙三个方案中小车均受到比较大的摩擦阻力作用,都需要进行“补偿阻力”,丁方案中由于滑块与气垫导轨间的摩擦力可以忽略不计,则不需要进行“补偿阻力”。故四种方案中,需要进行“补偿阻力”的方案是:甲、乙、丙。
四种方案中,甲方案可以通过弹簧测力计测得绳子拉力,乙、丁方案都可以通过力传感器测得绳子拉力,而丙方案需要用重物的重力近似等于绳子拉力,为了减小误差,丙方案需要满足重物质量远小于小车的质量。
相邻两计数点间还有四个点没有画出,可知相邻计数点时间间隔为
根据匀变速直线运动中间时刻速度等于该段过程的平均速度,则小车在点的瞬时速度为
根据逐差法有
以小车为对象,根据牛顿第二定律可得
可得
图像的斜率为
解得小车的质量为
纵轴截距为
解得
故答案为:甲、乙、丙;丙;;;;
15.对结点受力分析,受到三段轻绳的拉力,合力为零,如下图所示
根据平衡可得
,解得
,解得
乙物块处于静止状态,受力平衡,对乙受力分析,受到重力、斜面的支持力、绳的拉力以及静摩擦力,根据平衡条件可知,沿着斜面方向有
,解得
方向沿斜面向上。
答:轻绳上的拉力大小等于,上的拉力大小等于;
物块乙所受的摩擦力大小等于,方向沿斜面向上。
16.在时间内,甲、乙两车运动位移分别为
据题有
解得:
甲车开始刹车时,乙车速度为
若甲车刹车后经时间两车速度相等均为,两车恰好避免相撞,则
在时间内甲、乙两车运动位移分别为
又有
联立以上各式解得:
即甲车刹车加速度至少为。
答:的值为;
刹车后,甲车做匀减速直线运动的加速度至少为。
17.小物块滑到斜面底端过程中,根据动能定理可得
解得
从滑上长木板开始,经时间物块、木板速度相同,则对小物块研究
解得
对木板研究
解得
则
解得
此时物块距木板左端的距离为
由于木板与物块之间的滑动摩擦力大于木板与地面之间的滑动摩擦力,则共速后,二者一起做匀减速运动,则共速后,根据牛顿第二定律可得
解得
此过程中移动距离为
最终木板距斜面末端的距离为
答:小物块滑到斜面底端时的速度大小等于;
从滑上长木板开始,经时间物块、木板速度相同,此时物块距木板左端的距离等于;
最终木板距斜面末端的距离等于。
第14页,共17页
同课章节目录