专题二 培优点2 力学三大观点的综合应用(含解析)
文档属性
| 名称 | 专题二 培优点2 力学三大观点的综合应用(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 284.8KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-03-06 00:00:00 | ||
图片预览
文档简介
培优练2 力学三大观点的综合应用
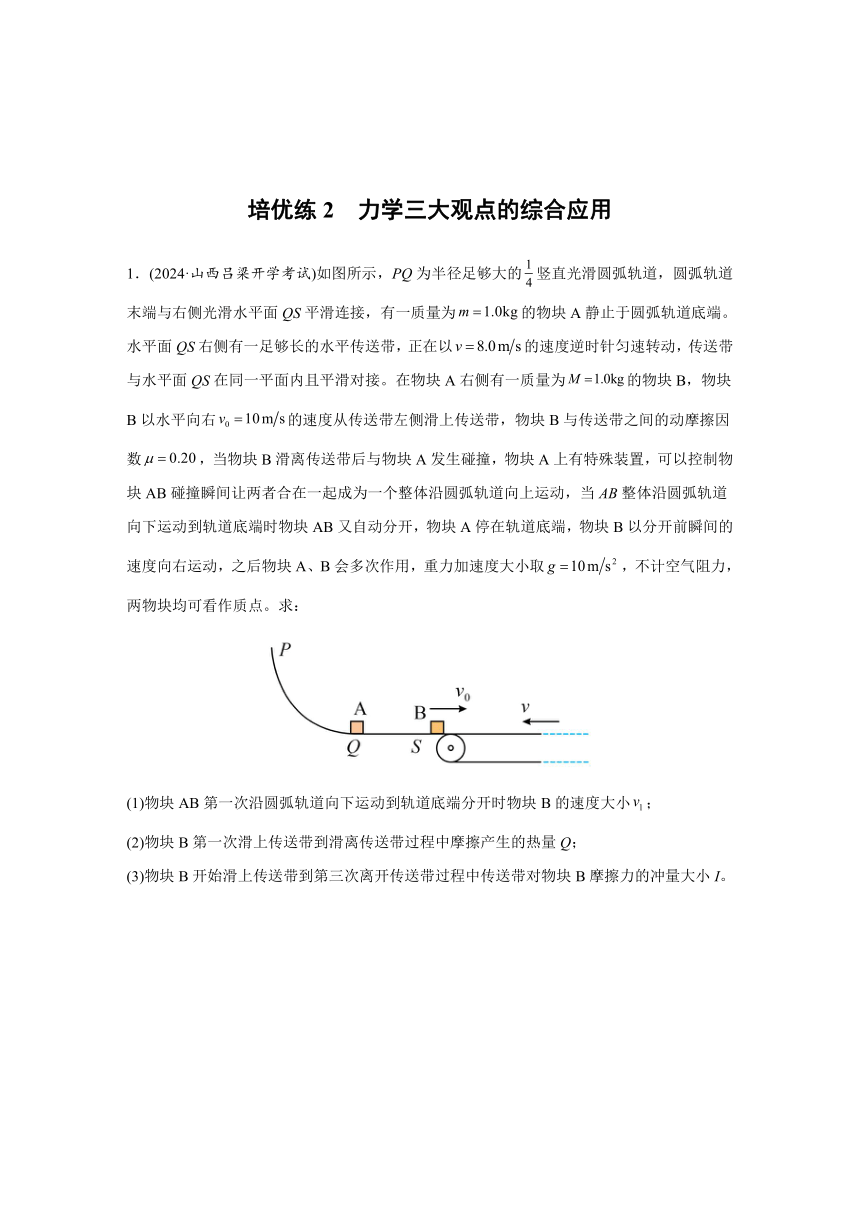
1.(2024·山西吕梁开学考试)如图所示,PQ为半径足够大的竖直光滑圆弧轨道,圆弧轨道末端与右侧光滑水平面QS平滑连接,有一质量为的物块A静止于圆弧轨道底端。水平面QS右侧有一足够长的水平传送带,正在以的速度逆时针匀速转动,传送带与水平面QS在同一平面内且平滑对接。在物块A右侧有一质量为的物块B,物块B以水平向右的速度从传送带左侧滑上传送带,物块B与传送带之间的动摩擦因数,当物块B滑离传送带后与物块A发生碰撞,物块A上有特殊装置,可以控制物块AB碰撞瞬间让两者合在一起成为一个整体沿圆弧轨道向上运动,当AB整体沿圆弧轨道向下运动到轨道底端时物块AB又自动分开,物块A停在轨道底端,物块B以分开前瞬间的速度向右运动,之后物块A、B会多次作用,重力加速度大小取,不计空气阻力,两物块均可看作质点。求:
(1)物块AB第一次沿圆弧轨道向下运动到轨道底端分开时物块B的速度大小;
(2)物块B第一次滑上传送带到滑离传送带过程中摩擦产生的热量Q;
(3)物块B开始滑上传送带到第三次离开传送带过程中传送带对物块B摩擦力的冲量大小I。
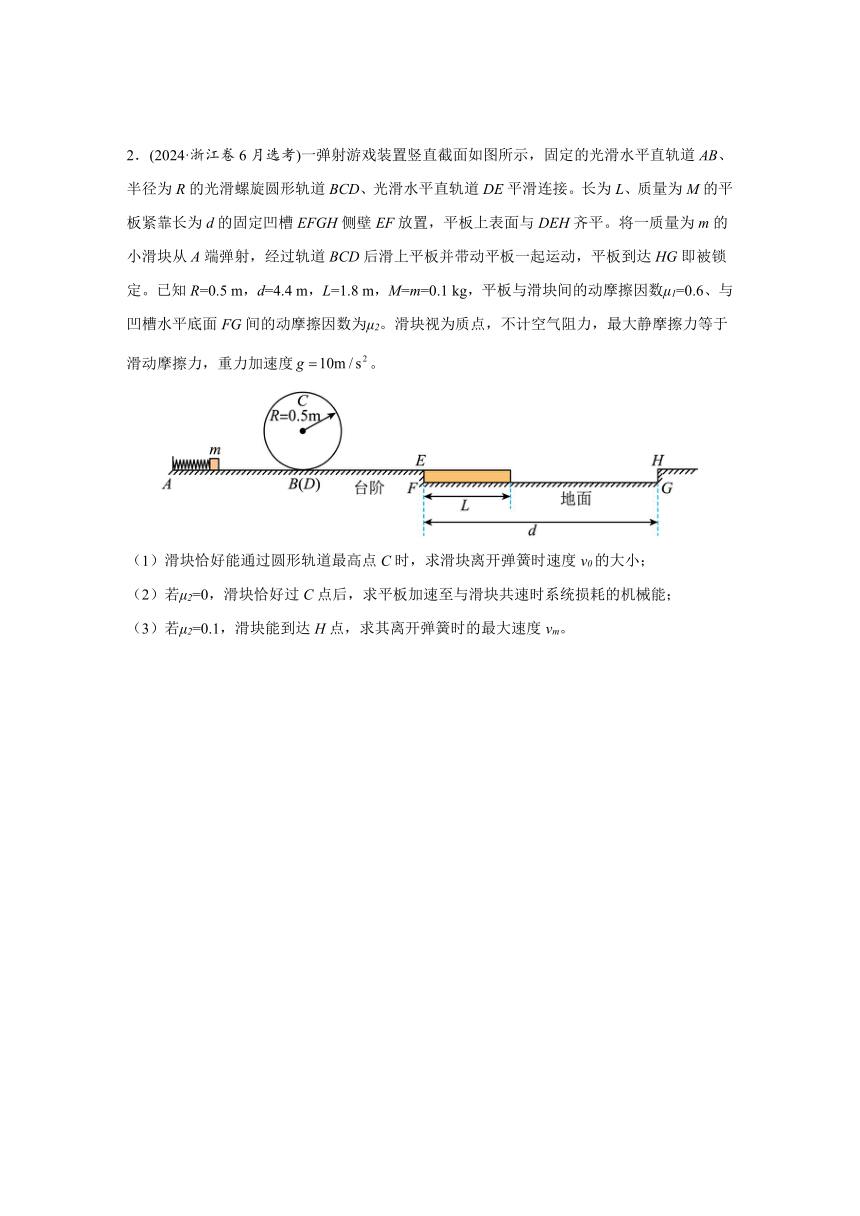
(2024·浙江卷6月选考)一弹射游戏装置竖直截面如图所示,固定的光滑水平直轨道AB、半径为R的光滑螺旋圆形轨道BCD、光滑水平直轨道DE平滑连接。长为L、质量为M的平板紧靠长为d的固定凹槽EFGH侧壁EF放置,平板上表面与DEH齐平。将一质量为m的小滑块从A端弹射,经过轨道BCD后滑上平板并带动平板一起运动,平板到达HG即被锁定。已知R=0.5 m,d=4.4 m,L=1.8 m,M=m=0.1 kg,平板与滑块间的动摩擦因数μ1=0.6、与凹槽水平底面FG间的动摩擦因数为μ2。滑块视为质点,不计空气阻力,最大静摩擦力等于滑动摩擦力,重力加速度。
(1)滑块恰好能通过圆形轨道最高点C时,求滑块离开弹簧时速度v0的大小;
(2)若μ2=0,滑块恰好过C点后,求平板加速至与滑块共速时系统损耗的机械能;
(3)若μ2=0.1,滑块能到达H点,求其离开弹簧时的最大速度vm。
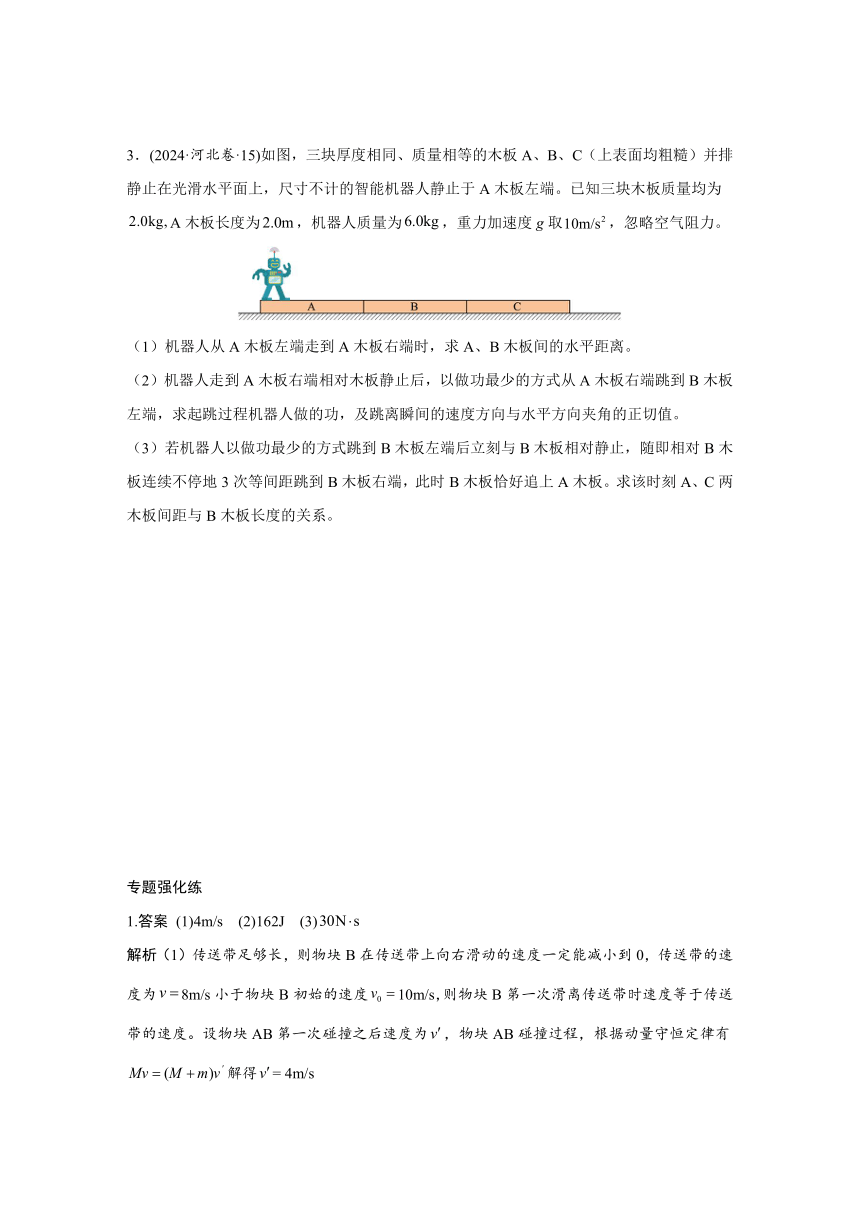
(2024·河北卷·15)如图,三块厚度相同、质量相等的木板A、B、C(上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于A木板左端。已知三块木板质量均为A木板长度为,机器人质量为,重力加速度g取,忽略空气阻力。
(1)机器人从A木板左端走到A木板右端时,求A、B木板间的水平距离。
(2)机器人走到A木板右端相对木板静止后,以做功最少的方式从A木板右端跳到B木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值。
(3)若机器人以做功最少的方式跳到B木板左端后立刻与B木板相对静止,随即相对B木板连续不停地3次等间距跳到B木板右端,此时B木板恰好追上A木板。求该时刻A、C两木板间距与B木板长度的关系。
专题强化练
1.答案 (1)4m/s (2)162J (3)
解析(1)传送带足够长,则物块B在传送带上向右滑动的速度一定能减小到0,传送带的速度为8m/s小于物块B初始的速度10m/s,则物块B第一次滑离传送带时速度等于传送带的速度。设物块AB第一次碰撞之后速度为,物块AB碰撞过程,根据动量守恒定律有解得= 4m/s
物块AB碰撞之后沿圆弧轨道向上运动和返回过程中系统的机械能守恒,即AB分开前瞬间它们的速度为= 4m/s,所以AB分开时的物块B的速度仍为=4m/s。
(2)物块B在传送带上向右减速运动过程,根据牛顿第二定律有
解得
物块B减速到0的时间为=5s
物块B和传送带运动的位移分别为和,减速过程中相对滑动的位移为
m
物块B在传送带上向左加速运动加速度还为,物块B向左加速到与传送速度相等时不再发生相对滑动,加速过程时间s
加速过程物块B和传送带运动的位移分别为和,加速过程中相对滑动的位移为m,
产生的热量为J
物块B以速度= 4m/s第二次滑上传送带,物块B的速度小于传送带的速度,则物块向右减速到0后再向左加速,减速和加速过程的加速度大小相等,根据运动的对称性可知物块B离开传送带时速度大小也为4m/s,物块B在第二次传送带运动的时间为
s
设物块AB第二次碰撞之后速度为,物块AB碰撞过程,根据动量守恒定律有
解得= 2m/s.
物块B以速度以=2m/s第三次滑上传送带,物块B的速度小于传送带的速度,则物块向右减速到0后再向左加速,减速和加速过程的加速度大小相等,根据运动的对称性可知物块B离开传送带时速度大小也为2m/s,物块B在传送带运动的时间为
s
物块B在传送带上与传送带有相对滑动的过程中,物块B会受到水平向左的滑动摩擦力,速度与传送带速度相等之后不再受到摩擦力的作用,则摩擦力的作用时间为
摩擦力的冲量为
2.答案(1)5m/s;(2)0.625J;(3)6m/s
解析(1)滑块恰好能通过圆形轨道最高点C时
从滑块离开弹簧到C过程,根据动能定理,解得
(2)平板加速至与滑块共速过程,根据动量守恒
根能量守恒解得
(3)若μ2=0.1,平板与滑块相互作用过程中,加速度分别为,共速后,共同加速度大小为
考虑滑块可能一直减速直到H,也可能先与木板共速然后共同减速;假设先与木板共速然后共同减速,则共速过程共速过程,滑块、木板位移分别为,
共速时,相对位移应为解得,随后共同减速到达H速度
说明可以到达H,因此假设成立,若滑块初速度再增大,则会从木板右侧掉落。
3.答案(1);(2)90J,2;(3)
解析(1)机器人从A木板左端走到A木板右端,机器人与A木板组成的系统动量守恒,设机器人质量为M,三个木板质量为m,取向右为正方向,则
机器人从A木板左端走到A木板右端时,机器人、木板A运动位移分别为为、,则有同时有,解得A、B木板间的水平距离
(2)设机器人起跳的速度大小为,方向与水平方向的夹角为,从A木板右端跳到B木板左端时间为t,根据斜抛运动规律得, ,联立解得
机器人跳离A的过程,系统水平方向动量守恒
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时,W取最小值,代入数值得此时
(3)根据可得,根据,得
分析可知A木板以该速度向左匀速运动,机器人跳离A木板到与B木板相对静止的过程中,机器人与BC木板组成的系统在水平方向动量守恒,得
解得.
该过程A木板向左运动的距离为
机器人连续3次等间距跳到B木板右端,整个过程机器人和B木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为,B木板的速度大小为,机器人每次跳跃的时间为,取向右为正方向,得①
每次跳跃时机器人和B木板的相对位移为,可得②
机器人到B木板右端时,B木板恰好追上A木板,从机器人跳到B左端到跳到B右端的过程中,AB木板的位移差为可得③
联立①②③解得
故A、C两木板间距为,,解得
1.(2024·山西吕梁开学考试)如图所示,PQ为半径足够大的竖直光滑圆弧轨道,圆弧轨道末端与右侧光滑水平面QS平滑连接,有一质量为的物块A静止于圆弧轨道底端。水平面QS右侧有一足够长的水平传送带,正在以的速度逆时针匀速转动,传送带与水平面QS在同一平面内且平滑对接。在物块A右侧有一质量为的物块B,物块B以水平向右的速度从传送带左侧滑上传送带,物块B与传送带之间的动摩擦因数,当物块B滑离传送带后与物块A发生碰撞,物块A上有特殊装置,可以控制物块AB碰撞瞬间让两者合在一起成为一个整体沿圆弧轨道向上运动,当AB整体沿圆弧轨道向下运动到轨道底端时物块AB又自动分开,物块A停在轨道底端,物块B以分开前瞬间的速度向右运动,之后物块A、B会多次作用,重力加速度大小取,不计空气阻力,两物块均可看作质点。求:
(1)物块AB第一次沿圆弧轨道向下运动到轨道底端分开时物块B的速度大小;
(2)物块B第一次滑上传送带到滑离传送带过程中摩擦产生的热量Q;
(3)物块B开始滑上传送带到第三次离开传送带过程中传送带对物块B摩擦力的冲量大小I。
(2024·浙江卷6月选考)一弹射游戏装置竖直截面如图所示,固定的光滑水平直轨道AB、半径为R的光滑螺旋圆形轨道BCD、光滑水平直轨道DE平滑连接。长为L、质量为M的平板紧靠长为d的固定凹槽EFGH侧壁EF放置,平板上表面与DEH齐平。将一质量为m的小滑块从A端弹射,经过轨道BCD后滑上平板并带动平板一起运动,平板到达HG即被锁定。已知R=0.5 m,d=4.4 m,L=1.8 m,M=m=0.1 kg,平板与滑块间的动摩擦因数μ1=0.6、与凹槽水平底面FG间的动摩擦因数为μ2。滑块视为质点,不计空气阻力,最大静摩擦力等于滑动摩擦力,重力加速度。
(1)滑块恰好能通过圆形轨道最高点C时,求滑块离开弹簧时速度v0的大小;
(2)若μ2=0,滑块恰好过C点后,求平板加速至与滑块共速时系统损耗的机械能;
(3)若μ2=0.1,滑块能到达H点,求其离开弹簧时的最大速度vm。
(2024·河北卷·15)如图,三块厚度相同、质量相等的木板A、B、C(上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于A木板左端。已知三块木板质量均为A木板长度为,机器人质量为,重力加速度g取,忽略空气阻力。
(1)机器人从A木板左端走到A木板右端时,求A、B木板间的水平距离。
(2)机器人走到A木板右端相对木板静止后,以做功最少的方式从A木板右端跳到B木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值。
(3)若机器人以做功最少的方式跳到B木板左端后立刻与B木板相对静止,随即相对B木板连续不停地3次等间距跳到B木板右端,此时B木板恰好追上A木板。求该时刻A、C两木板间距与B木板长度的关系。
专题强化练
1.答案 (1)4m/s (2)162J (3)
解析(1)传送带足够长,则物块B在传送带上向右滑动的速度一定能减小到0,传送带的速度为8m/s小于物块B初始的速度10m/s,则物块B第一次滑离传送带时速度等于传送带的速度。设物块AB第一次碰撞之后速度为,物块AB碰撞过程,根据动量守恒定律有解得= 4m/s
物块AB碰撞之后沿圆弧轨道向上运动和返回过程中系统的机械能守恒,即AB分开前瞬间它们的速度为= 4m/s,所以AB分开时的物块B的速度仍为=4m/s。
(2)物块B在传送带上向右减速运动过程,根据牛顿第二定律有
解得
物块B减速到0的时间为=5s
物块B和传送带运动的位移分别为和,减速过程中相对滑动的位移为
m
物块B在传送带上向左加速运动加速度还为,物块B向左加速到与传送速度相等时不再发生相对滑动,加速过程时间s
加速过程物块B和传送带运动的位移分别为和,加速过程中相对滑动的位移为m,
产生的热量为J
物块B以速度= 4m/s第二次滑上传送带,物块B的速度小于传送带的速度,则物块向右减速到0后再向左加速,减速和加速过程的加速度大小相等,根据运动的对称性可知物块B离开传送带时速度大小也为4m/s,物块B在第二次传送带运动的时间为
s
设物块AB第二次碰撞之后速度为,物块AB碰撞过程,根据动量守恒定律有
解得= 2m/s.
物块B以速度以=2m/s第三次滑上传送带,物块B的速度小于传送带的速度,则物块向右减速到0后再向左加速,减速和加速过程的加速度大小相等,根据运动的对称性可知物块B离开传送带时速度大小也为2m/s,物块B在传送带运动的时间为
s
物块B在传送带上与传送带有相对滑动的过程中,物块B会受到水平向左的滑动摩擦力,速度与传送带速度相等之后不再受到摩擦力的作用,则摩擦力的作用时间为
摩擦力的冲量为
2.答案(1)5m/s;(2)0.625J;(3)6m/s
解析(1)滑块恰好能通过圆形轨道最高点C时
从滑块离开弹簧到C过程,根据动能定理,解得
(2)平板加速至与滑块共速过程,根据动量守恒
根能量守恒解得
(3)若μ2=0.1,平板与滑块相互作用过程中,加速度分别为,共速后,共同加速度大小为
考虑滑块可能一直减速直到H,也可能先与木板共速然后共同减速;假设先与木板共速然后共同减速,则共速过程共速过程,滑块、木板位移分别为,
共速时,相对位移应为解得,随后共同减速到达H速度
说明可以到达H,因此假设成立,若滑块初速度再增大,则会从木板右侧掉落。
3.答案(1);(2)90J,2;(3)
解析(1)机器人从A木板左端走到A木板右端,机器人与A木板组成的系统动量守恒,设机器人质量为M,三个木板质量为m,取向右为正方向,则
机器人从A木板左端走到A木板右端时,机器人、木板A运动位移分别为为、,则有同时有,解得A、B木板间的水平距离
(2)设机器人起跳的速度大小为,方向与水平方向的夹角为,从A木板右端跳到B木板左端时间为t,根据斜抛运动规律得, ,联立解得
机器人跳离A的过程,系统水平方向动量守恒
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时,W取最小值,代入数值得此时
(3)根据可得,根据,得
分析可知A木板以该速度向左匀速运动,机器人跳离A木板到与B木板相对静止的过程中,机器人与BC木板组成的系统在水平方向动量守恒,得
解得.
该过程A木板向左运动的距离为
机器人连续3次等间距跳到B木板右端,整个过程机器人和B木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为,B木板的速度大小为,机器人每次跳跃的时间为,取向右为正方向,得①
每次跳跃时机器人和B木板的相对位移为,可得②
机器人到B木板右端时,B木板恰好追上A木板,从机器人跳到B左端到跳到B右端的过程中,AB木板的位移差为可得③
联立①②③解得
故A、C两木板间距为,,解得
同课章节目录