专题二 培优练1 板块模型的综合分析(含解析)
文档属性
| 名称 | 专题二 培优练1 板块模型的综合分析(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 442.1KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 人教版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-03-06 00:00:00 | ||
图片预览
文档简介
培优练1 板块模型的综合分析
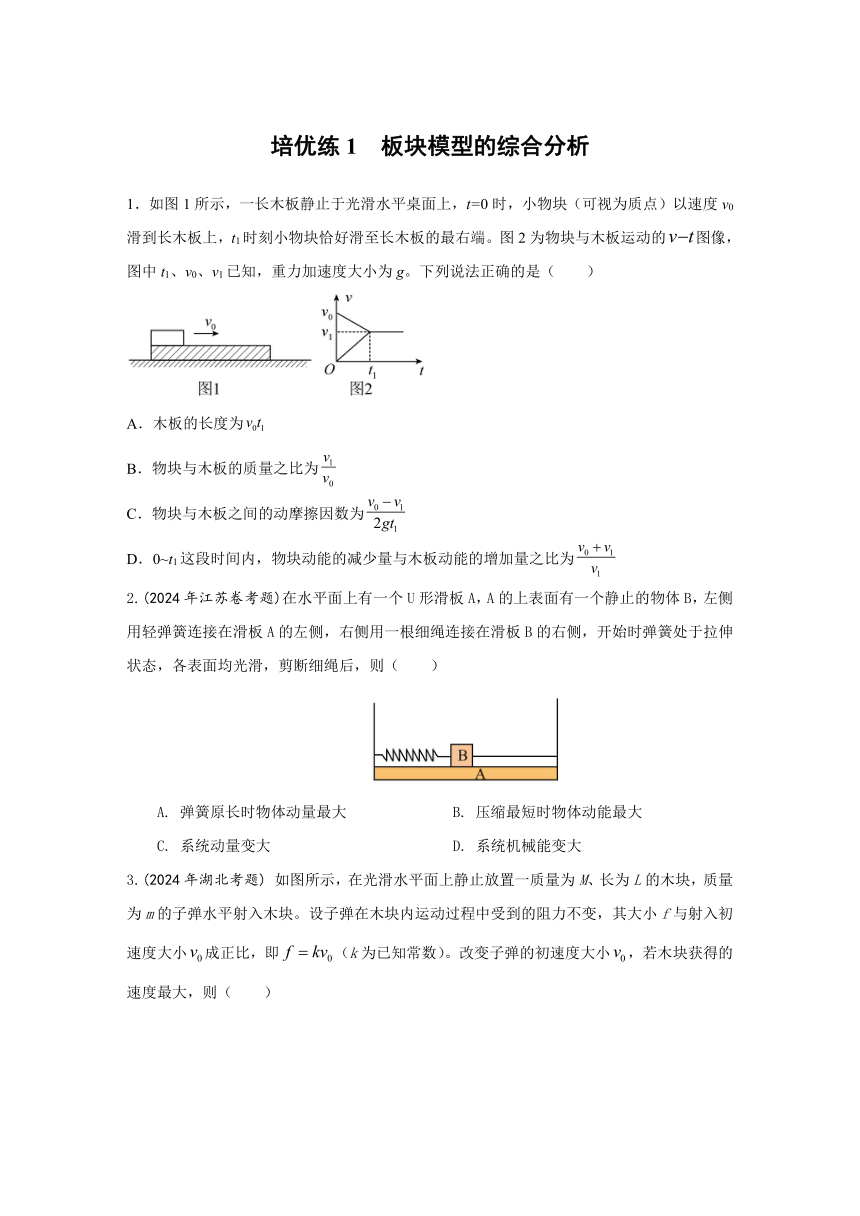
1.如图1所示,一长木板静止于光滑水平桌面上,t=0时,小物块(可视为质点)以速度v0滑到长木板上,t1时刻小物块恰好滑至长木板的最右端。图2为物块与木板运动的图像,图中t1、v0、v1已知,重力加速度大小为g。下列说法正确的是( )
A.木板的长度为
B.物块与木板的质量之比为
C.物块与木板之间的动摩擦因数为
D.0~t1这段时间内,物块动能的减少量与木板动能的增加量之比为
2.(2024年江苏卷考题)在水平面上有一个U形滑板A,A的上表面有一个静止的物体B,左侧用轻弹簧连接在滑板A的左侧,右侧用一根细绳连接在滑板B的右侧,开始时弹簧处于拉伸状态,各表面均光滑,剪断细绳后,则( )
A. 弹簧原长时物体动量最大 B. 压缩最短时物体动能最大
C. 系统动量变大 D. 系统机械能变大
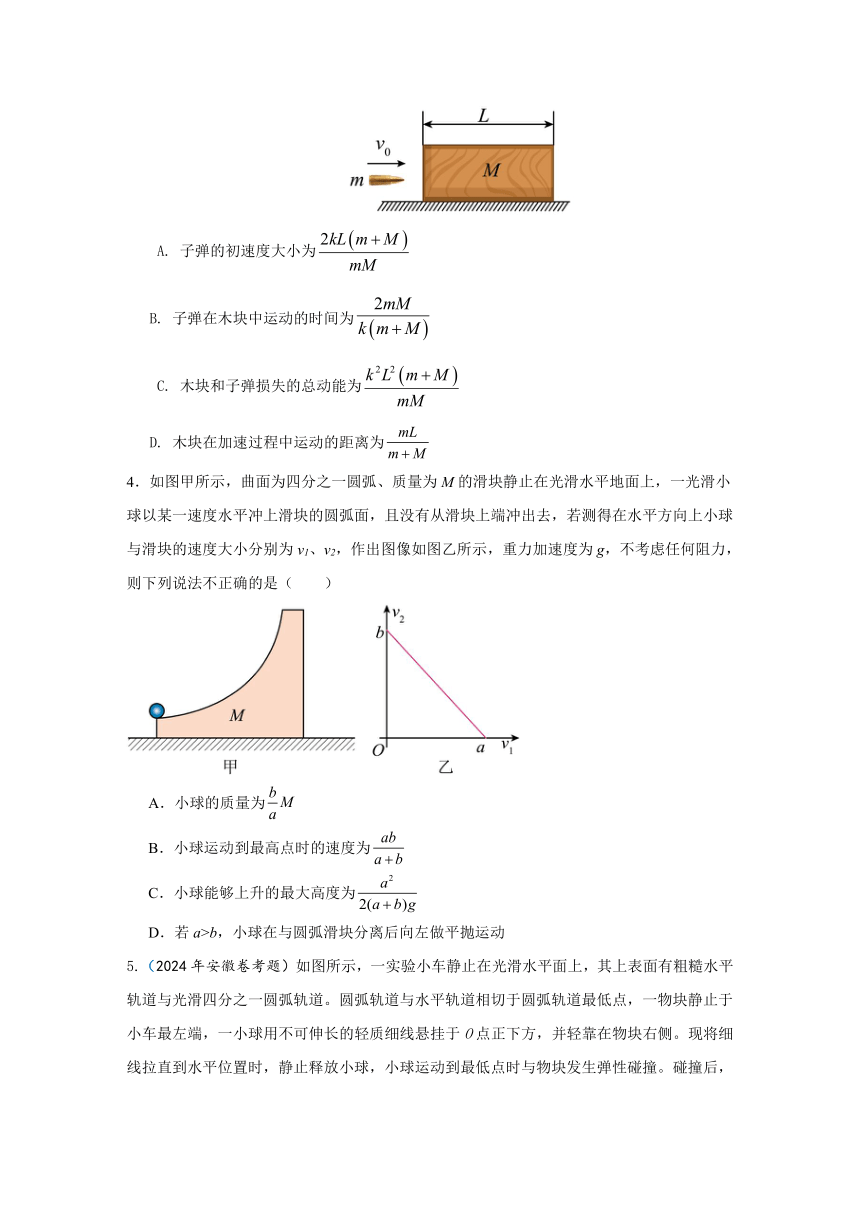
3.(2024年湖北考题) 如图所示,在光滑水平面上静止放置一质量为M、长为L的木块,质量为m的子弹水平射入木块。设子弹在木块内运动过程中受到的阻力不变,其大小f与射入初速度大小成正比,即(k为已知常数)。改变子弹的初速度大小,若木块获得的速度最大,则( )
子弹的初速度大小为
B. 子弹在木块中运动的时间为
C. 木块和子弹损失的总动能为
D. 木块在加速过程中运动的距离为
4.如图甲所示,曲面为四分之一圆弧、质量为M的滑块静止在光滑水平地面上,一光滑小球以某一速度水平冲上滑块的圆弧面,且没有从滑块上端冲出去,若测得在水平方向上小球与滑块的速度大小分别为v1、v2,作出图像如图乙所示,重力加速度为g,不考虑任何阻力,则下列说法不正确的是( )
A.小球的质量为
B.小球运动到最高点时的速度为
C.小球能够上升的最大高度为
D.若a>b,小球在与圆弧滑块分离后向左做平抛运动
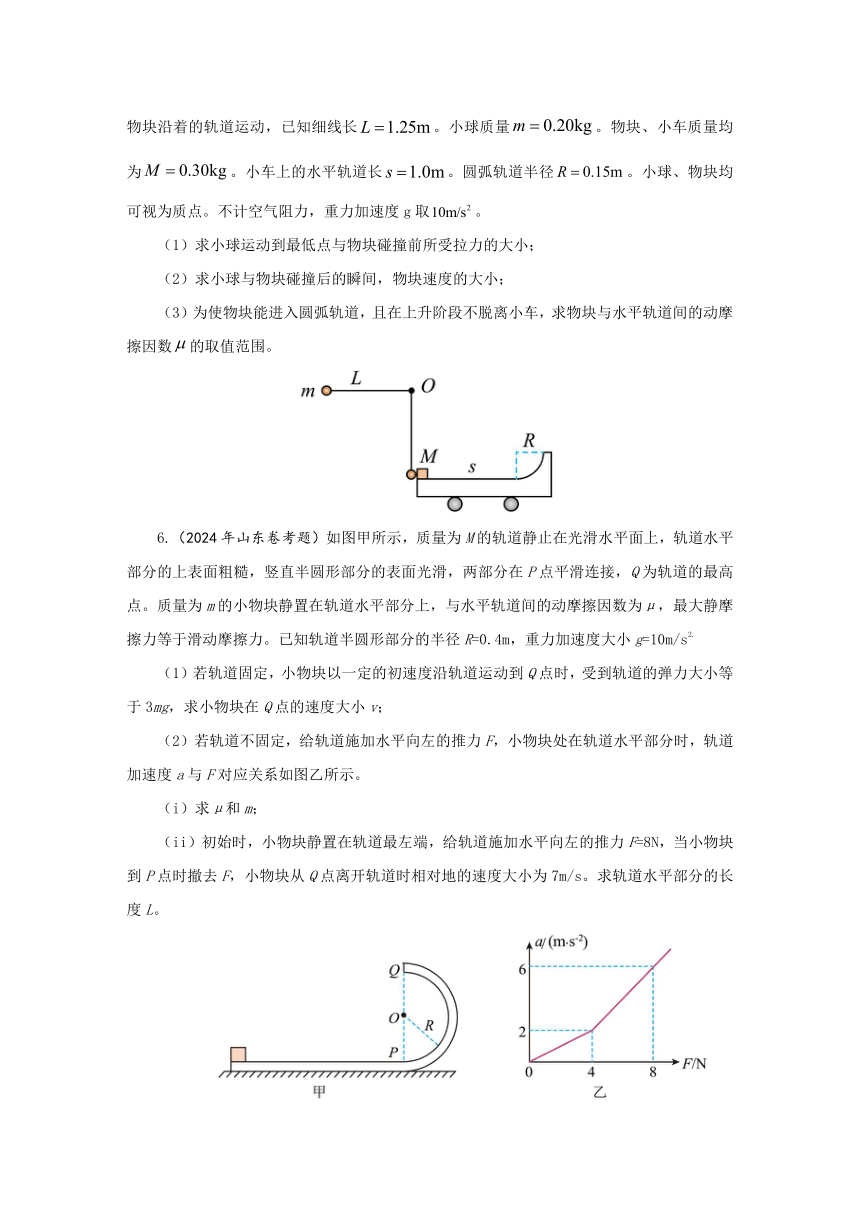
5.(2024年安徽卷考题)如图所示,一实验小车静止在光滑水平面上,其上表面有粗糙水平轨道与光滑四分之一圆弧轨道。圆弧轨道与水平轨道相切于圆弧轨道最低点,一物块静止于小车最左端,一小球用不可伸长的轻质细线悬挂于O点正下方,并轻靠在物块右侧。现将细线拉直到水平位置时,静止释放小球,小球运动到最低点时与物块发生弹性碰撞。碰撞后,物块沿着的轨道运动,已知细线长。小球质量。物块、小车质量均为。小车上的水平轨道长。圆弧轨道半径。小球、物块均可视为质点。不计空气阻力,重力加速度g取。
(1)求小球运动到最低点与物块碰撞前所受拉力的大小;
(2)求小球与物块碰撞后的瞬间,物块速度的大小;
(3)为使物块能进入圆弧轨道,且在上升阶段不脱离小车,求物块与水平轨道间的动摩擦因数的取值范围。
6.(2024年山东卷考题)如图甲所示,质量为M的轨道静止在光滑水平面上,轨道水平部分的上表面粗糙,竖直半圆形部分的表面光滑,两部分在P点平滑连接,Q为轨道的最高点。质量为m的小物块静置在轨道水平部分上,与水平轨道间的动摩擦因数为μ,最大静摩擦力等于滑动摩擦力。已知轨道半圆形部分的半径R=0.4m,重力加速度大小g=10m/s2.
(1)若轨道固定,小物块以一定的初速度沿轨道运动到Q点时,受到轨道的弹力大小等于3mg,求小物块在Q点的速度大小v;
(2)若轨道不固定,给轨道施加水平向左的推力F,小物块处在轨道水平部分时,轨道加速度a与F对应关系如图乙所示。
(i)求μ和m;
(ii)初始时,小物块静置在轨道最左端,给轨道施加水平向左的推力F=8N,当小物块到P点时撤去F,小物块从Q点离开轨道时相对地的速度大小为7m/s。求轨道水平部分的长度L。
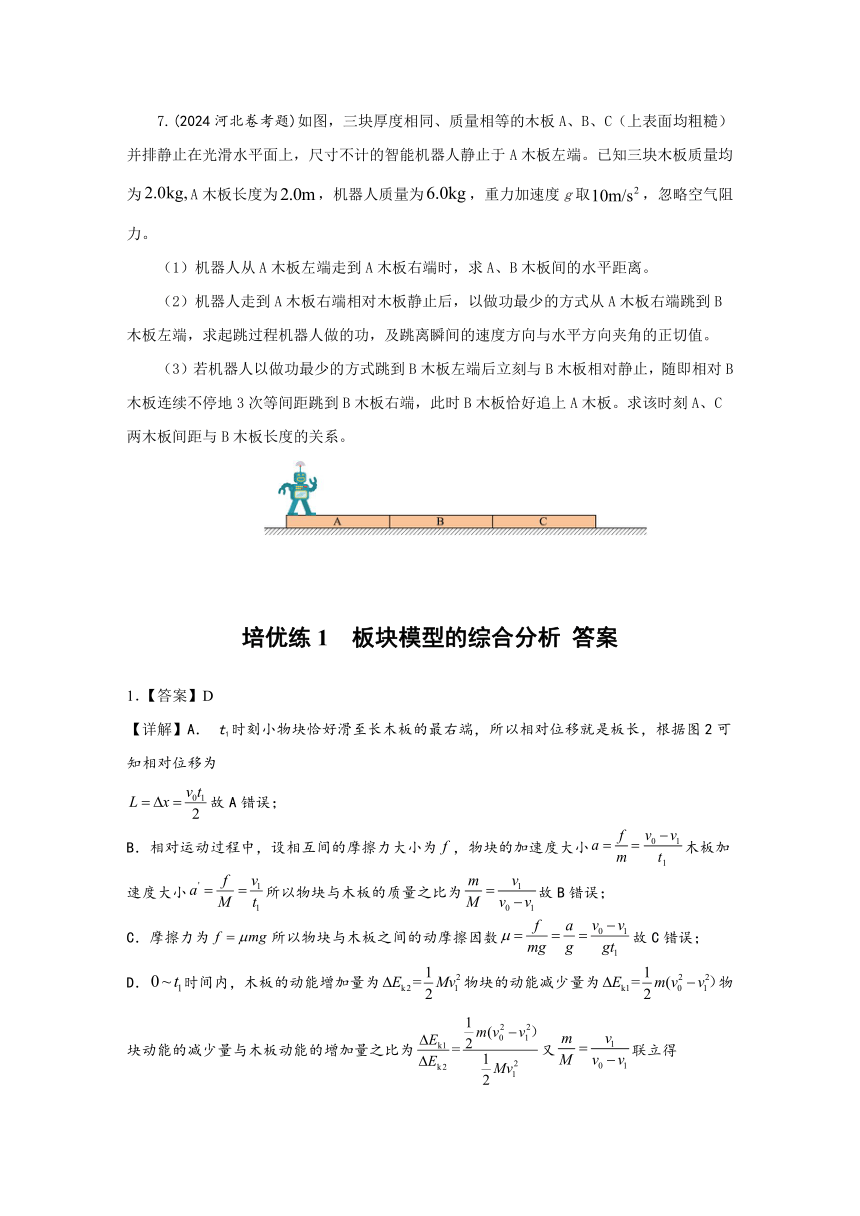
7.(2024河北卷考题)如图,三块厚度相同、质量相等的木板A、B、C(上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于A木板左端。已知三块木板质量均为A木板长度为,机器人质量为,重力加速度g取,忽略空气阻力。
(1)机器人从A木板左端走到A木板右端时,求A、B木板间的水平距离。
(2)机器人走到A木板右端相对木板静止后,以做功最少的方式从A木板右端跳到B木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值。
(3)若机器人以做功最少的方式跳到B木板左端后立刻与B木板相对静止,随即相对B木板连续不停地3次等间距跳到B木板右端,此时B木板恰好追上A木板。求该时刻A、C两木板间距与B木板长度的关系。
培优练1 板块模型的综合分析 答案
1.【答案】D
【详解】A. t1时刻小物块恰好滑至长木板的最右端,所以相对位移就是板长,根据图2可知相对位移为
故A错误;
B.相对运动过程中,设相互间的摩擦力大小为,物块的加速度大小木板加速度大小所以物块与木板的质量之比为故B错误;
C.摩擦力为所以物块与木板之间的动摩擦因数故C错误;
D.时间内,木板的动能增加量为物块的动能减少量为物块动能的减少量与木板动能的增加量之比为又联立得故D正确。故选D。
2.【答案】A
【解析】对整个系统分析可知合外力为0,A和B组成的系统动量守恒,得
设弹簧的初始弹性势能为,整个系统只有弹簧弹力做功,机械能守恒,当弹簧原长时得
联立得
故可知弹簧原长时物体速度最大,此时动量最大,动能最大。
故选A。
3.【答案】AD
【解析】A.子弹和木块相互作用过程系统动量守恒,令子弹穿出木块后子弹和木块的速度的速度分别为,则有
子弹和木块相互作用过程中合力都为,因此子弹和物块的加速度分别为
由运动学公式可得子弹和木块的位移分别为
联立上式可得
因此木块的速度最大即取极值即可,该函数在到无穷单调递减,因此当木块的速度最大,A正确;
B.则子弹穿过木块时木块的速度为
由运动学公式 ,可得 ,故B错误;
C.由能量守恒可得子弹和木块损失的能量转化为系统摩擦生热,即
故C错误;
D.木块加速过程运动的距离为 ,故D正确。
故选AD。
4.【答案】C
【详解】A.设小球的质量为m,初速度为v0,在水平方向上由动量守恒定律得
结合图乙可得
所以
,
故A正确,不符合题意;
D.对小球和圆弧滑块组成的系统,有
解得小球在与圆弧滑块分离时的速度为
即a>b时,小球的速度方向向左,所以小球与圆弧分离时向左做平抛运动,故D正确,不符合题意;
B.小球运动到最高点时,竖直方向速度为零,在水平方向上与滑块具有相同的速度,在水平方向上由动量守恒定律得
解得
故B正确,不符合题意;
C.小球从开始运动到最高点的过程中,由机械能守恒定律得
解得
故C错误,符合题意。
故选C。
5.【答案】(1)6N;(2)4m/s;(3)
【解析】(1)对小球摆动到最低点的过程中,由动能定理
解得
在最低点,对小球由牛顿第二定律
解得,小球运动到最低点与物块碰撞前所受拉力的大小为
(2)小球与物块碰撞过程中,由动量守恒定律和机械能守恒定律
解得小球与物块碰撞后的瞬间,物块速度的大小为
(3)若物块恰好运动到圆弧轨道的最低点,此时两者共速,则对物块与小车整体由水平方向动量守恒
由能量守恒定律
解得
若物块恰好运动到与圆弧圆心等高位置,此时两者共速,则对物块与小车整体由水平方向动量守恒
由能量守恒定律
解得
综上所述物块与水平轨道间的动摩擦因数的取值范围为
6.【答案】(1);(2)(i),;(3)
【解析】(1)根据题意可知小物块在Q点由合力提供向心力有
代入数据解得
(2)(i)根据题意可知当F≤4N时,小物块与轨道是一起向左加速,根据牛顿第二定律可知
根据图乙有
当外力时,轨道与小物块有相对滑动,则对轨道有
结合题图乙有
可知
截距
联立以上各式可得 ,,
(ii)由图乙可知,当F=8N时,轨道的加速度为6m/s2,小物块的加速度为
当小物块运动到P点时,经过t0时间,则轨道有
小物块有
在这个过程中系统机械能守恒有
水平方向动量守恒,以水平向左的正方向,则有
联立解得
根据运动学公式有
代入数据解得
7.【答案】(1);(2)90J,2;(3)
【解析】(1)机器人从A木板左端走到A木板右端,机器人与A木板组成的系统动量守恒,设机器人质量为M,三个木板质量为m,根据人船模型得
同时有
解得A、B木板间的水平距离
(2)设机器人起跳的速度大小为,方向与水平方向的夹角为,从A木板右端跳到B木板左端时间为t,根据斜抛运动规律得
联立解得
机器人跳离A的过程,系统水平方向动量守恒
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时,W取最小值,代入数值得此时
(3)根据可得,根据
得
分析可知A木板以该速度向左匀速运动,机器人跳离A木板到与B木板相对静止的过程中,机器人与BC木板组成的系统在水平方向动量守恒,得
解得
该过程A木板向左运动的距离为
机器人连续3次等间距跳到B木板右端,整个过程机器人和B木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为,B木板的速度大小为,机器人每次跳跃的时间为,取向右为正方向,得 ①
每次跳跃时机器人和B木板的相对位移为,可得 ②
机器人到B木板右端时,B木板恰好追上A木板,从机器人跳到B左端到跳到B右端的过程中,AB木板的位移差为
可得 ③
联立①②③解得
故A、C两木板间距为
解得
1.如图1所示,一长木板静止于光滑水平桌面上,t=0时,小物块(可视为质点)以速度v0滑到长木板上,t1时刻小物块恰好滑至长木板的最右端。图2为物块与木板运动的图像,图中t1、v0、v1已知,重力加速度大小为g。下列说法正确的是( )
A.木板的长度为
B.物块与木板的质量之比为
C.物块与木板之间的动摩擦因数为
D.0~t1这段时间内,物块动能的减少量与木板动能的增加量之比为
2.(2024年江苏卷考题)在水平面上有一个U形滑板A,A的上表面有一个静止的物体B,左侧用轻弹簧连接在滑板A的左侧,右侧用一根细绳连接在滑板B的右侧,开始时弹簧处于拉伸状态,各表面均光滑,剪断细绳后,则( )
A. 弹簧原长时物体动量最大 B. 压缩最短时物体动能最大
C. 系统动量变大 D. 系统机械能变大
3.(2024年湖北考题) 如图所示,在光滑水平面上静止放置一质量为M、长为L的木块,质量为m的子弹水平射入木块。设子弹在木块内运动过程中受到的阻力不变,其大小f与射入初速度大小成正比,即(k为已知常数)。改变子弹的初速度大小,若木块获得的速度最大,则( )
子弹的初速度大小为
B. 子弹在木块中运动的时间为
C. 木块和子弹损失的总动能为
D. 木块在加速过程中运动的距离为
4.如图甲所示,曲面为四分之一圆弧、质量为M的滑块静止在光滑水平地面上,一光滑小球以某一速度水平冲上滑块的圆弧面,且没有从滑块上端冲出去,若测得在水平方向上小球与滑块的速度大小分别为v1、v2,作出图像如图乙所示,重力加速度为g,不考虑任何阻力,则下列说法不正确的是( )
A.小球的质量为
B.小球运动到最高点时的速度为
C.小球能够上升的最大高度为
D.若a>b,小球在与圆弧滑块分离后向左做平抛运动
5.(2024年安徽卷考题)如图所示,一实验小车静止在光滑水平面上,其上表面有粗糙水平轨道与光滑四分之一圆弧轨道。圆弧轨道与水平轨道相切于圆弧轨道最低点,一物块静止于小车最左端,一小球用不可伸长的轻质细线悬挂于O点正下方,并轻靠在物块右侧。现将细线拉直到水平位置时,静止释放小球,小球运动到最低点时与物块发生弹性碰撞。碰撞后,物块沿着的轨道运动,已知细线长。小球质量。物块、小车质量均为。小车上的水平轨道长。圆弧轨道半径。小球、物块均可视为质点。不计空气阻力,重力加速度g取。
(1)求小球运动到最低点与物块碰撞前所受拉力的大小;
(2)求小球与物块碰撞后的瞬间,物块速度的大小;
(3)为使物块能进入圆弧轨道,且在上升阶段不脱离小车,求物块与水平轨道间的动摩擦因数的取值范围。
6.(2024年山东卷考题)如图甲所示,质量为M的轨道静止在光滑水平面上,轨道水平部分的上表面粗糙,竖直半圆形部分的表面光滑,两部分在P点平滑连接,Q为轨道的最高点。质量为m的小物块静置在轨道水平部分上,与水平轨道间的动摩擦因数为μ,最大静摩擦力等于滑动摩擦力。已知轨道半圆形部分的半径R=0.4m,重力加速度大小g=10m/s2.
(1)若轨道固定,小物块以一定的初速度沿轨道运动到Q点时,受到轨道的弹力大小等于3mg,求小物块在Q点的速度大小v;
(2)若轨道不固定,给轨道施加水平向左的推力F,小物块处在轨道水平部分时,轨道加速度a与F对应关系如图乙所示。
(i)求μ和m;
(ii)初始时,小物块静置在轨道最左端,给轨道施加水平向左的推力F=8N,当小物块到P点时撤去F,小物块从Q点离开轨道时相对地的速度大小为7m/s。求轨道水平部分的长度L。
7.(2024河北卷考题)如图,三块厚度相同、质量相等的木板A、B、C(上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于A木板左端。已知三块木板质量均为A木板长度为,机器人质量为,重力加速度g取,忽略空气阻力。
(1)机器人从A木板左端走到A木板右端时,求A、B木板间的水平距离。
(2)机器人走到A木板右端相对木板静止后,以做功最少的方式从A木板右端跳到B木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值。
(3)若机器人以做功最少的方式跳到B木板左端后立刻与B木板相对静止,随即相对B木板连续不停地3次等间距跳到B木板右端,此时B木板恰好追上A木板。求该时刻A、C两木板间距与B木板长度的关系。
培优练1 板块模型的综合分析 答案
1.【答案】D
【详解】A. t1时刻小物块恰好滑至长木板的最右端,所以相对位移就是板长,根据图2可知相对位移为
故A错误;
B.相对运动过程中,设相互间的摩擦力大小为,物块的加速度大小木板加速度大小所以物块与木板的质量之比为故B错误;
C.摩擦力为所以物块与木板之间的动摩擦因数故C错误;
D.时间内,木板的动能增加量为物块的动能减少量为物块动能的减少量与木板动能的增加量之比为又联立得故D正确。故选D。
2.【答案】A
【解析】对整个系统分析可知合外力为0,A和B组成的系统动量守恒,得
设弹簧的初始弹性势能为,整个系统只有弹簧弹力做功,机械能守恒,当弹簧原长时得
联立得
故可知弹簧原长时物体速度最大,此时动量最大,动能最大。
故选A。
3.【答案】AD
【解析】A.子弹和木块相互作用过程系统动量守恒,令子弹穿出木块后子弹和木块的速度的速度分别为,则有
子弹和木块相互作用过程中合力都为,因此子弹和物块的加速度分别为
由运动学公式可得子弹和木块的位移分别为
联立上式可得
因此木块的速度最大即取极值即可,该函数在到无穷单调递减,因此当木块的速度最大,A正确;
B.则子弹穿过木块时木块的速度为
由运动学公式 ,可得 ,故B错误;
C.由能量守恒可得子弹和木块损失的能量转化为系统摩擦生热,即
故C错误;
D.木块加速过程运动的距离为 ,故D正确。
故选AD。
4.【答案】C
【详解】A.设小球的质量为m,初速度为v0,在水平方向上由动量守恒定律得
结合图乙可得
所以
,
故A正确,不符合题意;
D.对小球和圆弧滑块组成的系统,有
解得小球在与圆弧滑块分离时的速度为
即a>b时,小球的速度方向向左,所以小球与圆弧分离时向左做平抛运动,故D正确,不符合题意;
B.小球运动到最高点时,竖直方向速度为零,在水平方向上与滑块具有相同的速度,在水平方向上由动量守恒定律得
解得
故B正确,不符合题意;
C.小球从开始运动到最高点的过程中,由机械能守恒定律得
解得
故C错误,符合题意。
故选C。
5.【答案】(1)6N;(2)4m/s;(3)
【解析】(1)对小球摆动到最低点的过程中,由动能定理
解得
在最低点,对小球由牛顿第二定律
解得,小球运动到最低点与物块碰撞前所受拉力的大小为
(2)小球与物块碰撞过程中,由动量守恒定律和机械能守恒定律
解得小球与物块碰撞后的瞬间,物块速度的大小为
(3)若物块恰好运动到圆弧轨道的最低点,此时两者共速,则对物块与小车整体由水平方向动量守恒
由能量守恒定律
解得
若物块恰好运动到与圆弧圆心等高位置,此时两者共速,则对物块与小车整体由水平方向动量守恒
由能量守恒定律
解得
综上所述物块与水平轨道间的动摩擦因数的取值范围为
6.【答案】(1);(2)(i),;(3)
【解析】(1)根据题意可知小物块在Q点由合力提供向心力有
代入数据解得
(2)(i)根据题意可知当F≤4N时,小物块与轨道是一起向左加速,根据牛顿第二定律可知
根据图乙有
当外力时,轨道与小物块有相对滑动,则对轨道有
结合题图乙有
可知
截距
联立以上各式可得 ,,
(ii)由图乙可知,当F=8N时,轨道的加速度为6m/s2,小物块的加速度为
当小物块运动到P点时,经过t0时间,则轨道有
小物块有
在这个过程中系统机械能守恒有
水平方向动量守恒,以水平向左的正方向,则有
联立解得
根据运动学公式有
代入数据解得
7.【答案】(1);(2)90J,2;(3)
【解析】(1)机器人从A木板左端走到A木板右端,机器人与A木板组成的系统动量守恒,设机器人质量为M,三个木板质量为m,根据人船模型得
同时有
解得A、B木板间的水平距离
(2)设机器人起跳的速度大小为,方向与水平方向的夹角为,从A木板右端跳到B木板左端时间为t,根据斜抛运动规律得
联立解得
机器人跳离A的过程,系统水平方向动量守恒
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时,W取最小值,代入数值得此时
(3)根据可得,根据
得
分析可知A木板以该速度向左匀速运动,机器人跳离A木板到与B木板相对静止的过程中,机器人与BC木板组成的系统在水平方向动量守恒,得
解得
该过程A木板向左运动的距离为
机器人连续3次等间距跳到B木板右端,整个过程机器人和B木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为,B木板的速度大小为,机器人每次跳跃的时间为,取向右为正方向,得 ①
每次跳跃时机器人和B木板的相对位移为,可得 ②
机器人到B木板右端时,B木板恰好追上A木板,从机器人跳到B左端到跳到B右端的过程中,AB木板的位移差为
可得 ③
联立①②③解得
故A、C两木板间距为
解得
同课章节目录