专题训练四 计算综合训练 (有答案)2025年中考物理一轮复习
文档属性
| 名称 | 专题训练四 计算综合训练 (有答案)2025年中考物理一轮复习 |
|
|
| 格式 | docx | ||
| 文件大小 | 631.6KB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-03-25 00:00:00 | ||
图片预览


文档简介
中小学教育资源及组卷应用平台
专题训练四 计算综合训练
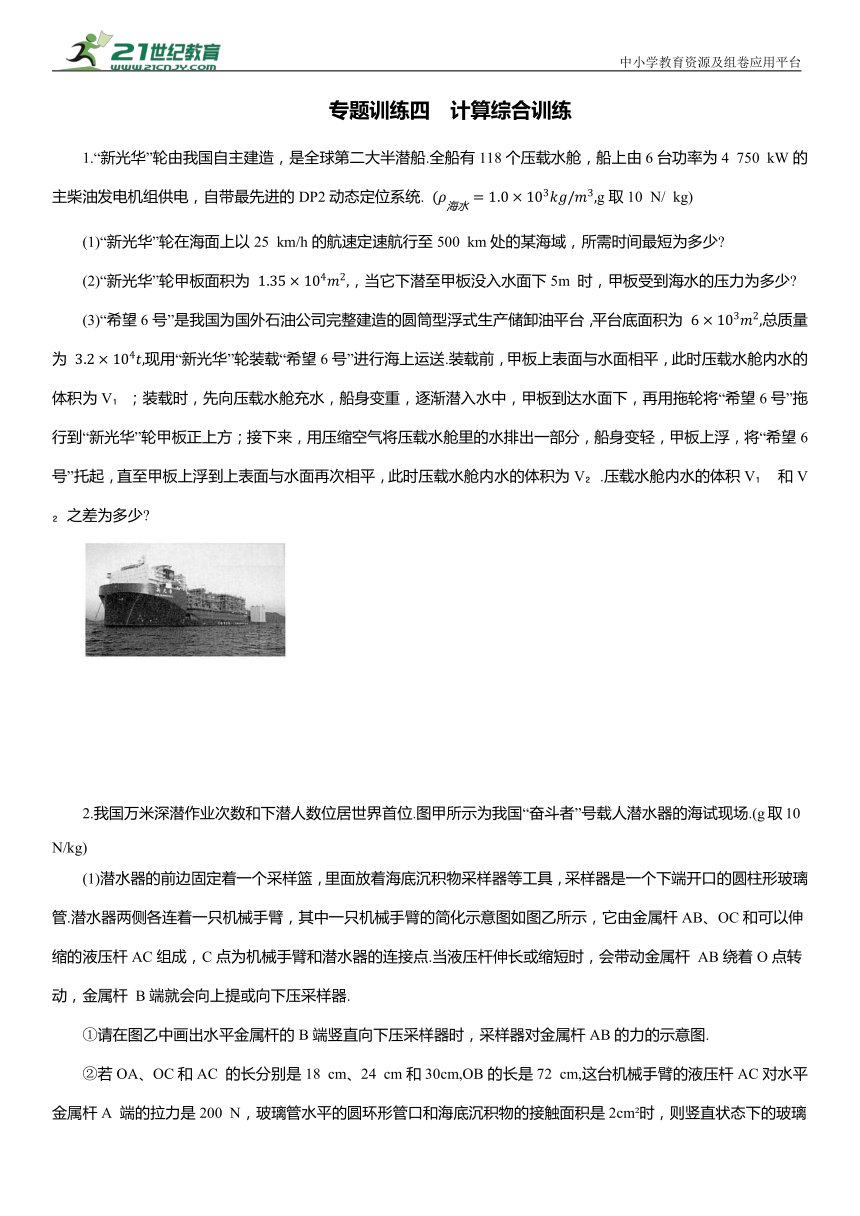
1.“新光华”轮由我国自主建造,是全球第二大半潜船.全船有118个压载水舱,船上由6台功率为4 750 kW的主柴油发电机组供电,自带最先进的DP2动态定位系统. g取10 N/ kg)
(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需时间最短为多少
(2)“新光华”轮甲板面积为 ,当它下潜至甲板没入水面下5m 时,甲板受到海水的压力为多少
(3)“希望6号”是我国为国外石油公司完整建造的圆筒型浮式生产储卸油平台,平台底面积为 总质量为 现用“新光华”轮装载“希望6号”进行海上运送.装载前,甲板上表面与水面相平,此时压载水舱内水的体积为V ;装载时,先向压载水舱充水,船身变重,逐渐潜入水中,甲板到达水面下,再用拖轮将“希望6号”拖行到“新光华”轮甲板正上方;接下来,用压缩空气将压载水舱里的水排出一部分,船身变轻,甲板上浮,将“希望6号”托起,直至甲板上浮到上表面与水面再次相平,此时压载水舱内水的体积为V .压载水舱内水的体积V 和V 之差为多少
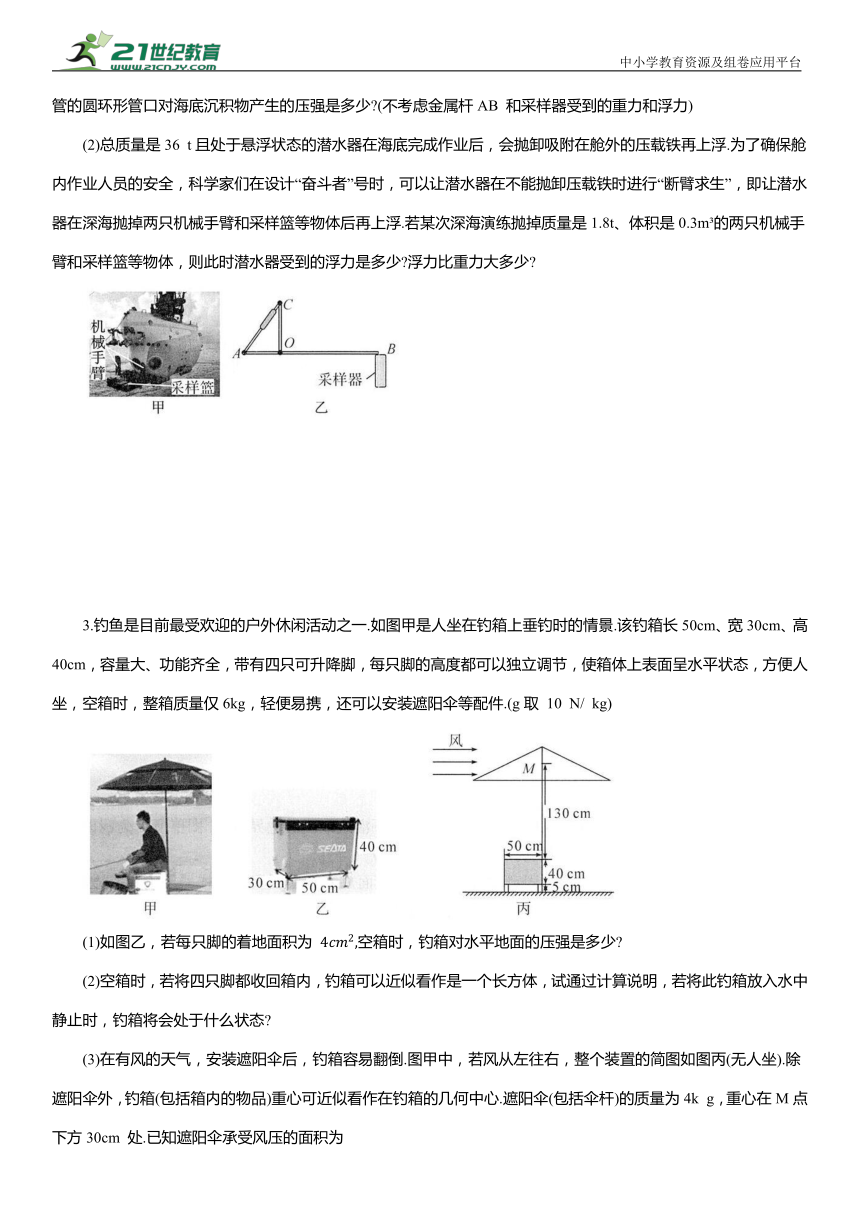
2.我国万米深潜作业次数和下潜人数位居世界首位.图甲所示为我国“奋斗者”号载人潜水器的海试现场.(g取10 N/kg)
(1)潜水器的前边固定着一个采样篮,里面放着海底沉积物采样器等工具,采样器是一个下端开口的圆柱形玻璃管.潜水器两侧各连着一只机械手臂,其中一只机械手臂的简化示意图如图乙所示,它由金属杆AB、OC和可以伸缩的液压杆AC组成,C点为机械手臂和潜水器的连接点.当液压杆伸长或缩短时,会带动金属杆 AB绕着O点转动,金属杆 B端就会向上提或向下压采样器.
①请在图乙中画出水平金属杆的B端竖直向下压采样器时,采样器对金属杆AB的力的示意图.
②若OA、OC和AC 的长分别是18 cm、24 cm和30cm,OB的长是72 cm,这台机械手臂的液压杆AC对水平金属杆A 端的拉力是200 N,玻璃管水平的圆环形管口和海底沉积物的接触面积是2cm 时,则竖直状态下的玻璃管的圆环形管口对海底沉积物产生的压强是多少 (不考虑金属杆AB 和采样器受到的重力和浮力)
(2)总质量是36 t且处于悬浮状态的潜水器在海底完成作业后,会抛卸吸附在舱外的压载铁再上浮.为了确保舱内作业人员的安全,科学家们在设计“奋斗者”号时,可以让潜水器在不能抛卸压载铁时进行“断臂求生”,即让潜水器在深海抛掉两只机械手臂和采样篮等物体后再上浮.若某次深海演练抛掉质量是1.8t、体积是0.3m 的两只机械手臂和采样篮等物体,则此时潜水器受到的浮力是多少 浮力比重力大多少
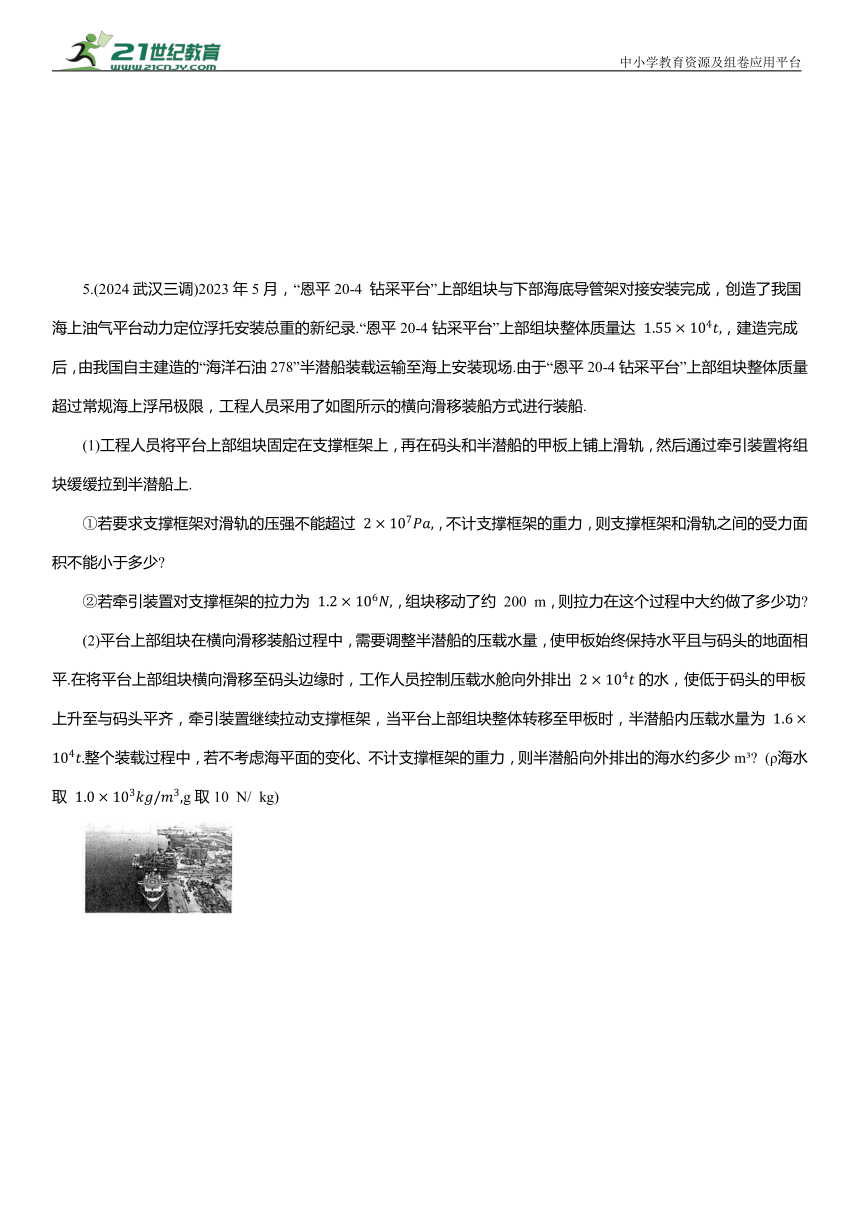
3.钓鱼是目前最受欢迎的户外休闲活动之一.如图甲是人坐在钓箱上垂钓时的情景.该钓箱长50cm、宽30cm、高40cm,容量大、功能齐全,带有四只可升降脚,每只脚的高度都可以独立调节,使箱体上表面呈水平状态,方便人坐,空箱时,整箱质量仅6kg,轻便易携,还可以安装遮阳伞等配件.(g取 10 N/ kg)
(1)如图乙,若每只脚的着地面积为 空箱时,钓箱对水平地面的压强是多少
(2)空箱时,若将四只脚都收回箱内,钓箱可以近似看作是一个长方体,试通过计算说明,若将此钓箱放入水中静止时,钓箱将会处于什么状态
(3)在有风的天气,安装遮阳伞后,钓箱容易翻倒.图甲中,若风从左往右,整个装置的简图如图丙(无人坐).除遮阳伞外,钓箱(包括箱内的物品)重心可近似看作在钓箱的几何中心.遮阳伞(包括伞杆)的质量为4k g,重心在M点下方30cm 处.已知遮阳伞承受风压的面积为
3.某时刻风压为 风压作用点可视为M点.当人离开钓箱后,为了使钓箱不翻倒,至少应该在钓箱内放多少千克的重物 (空气对遮阳伞的升力忽略不计)
4.如图甲所示是我国自主研发的一款水陆两栖车,它是一种结合了车与船的双重性能的特种车辆,既可以像汽车一样在陆地上行驶,又可以像船一样在水上浮渡.该车车长5.89m,轴距3.2m,整车质量2.4 t,最大承载量600 kg.(g取10 N/ kg)
(1)水陆两栖车的轮胎表面有较深的花纹,是为了 (选填“增大”或“减小”)摩擦.请在图乙中画出该车轮对地面压力的示意图.
(2)水陆两栖车能浮于水面,是因为特殊的车体和四个较大的相同车轮都提供了浮力.当该车满载在水中浮渡时,除四个车轮都浸没外,车体浸入水中的体积为2.4m ,则每个车轮排开水的体积是多少立方米
(3)当该车空载在水平路面上直线行驶时,若重力作用线到前轮轴的距离为1.2m,假设重心位于整车左、右两侧中轴线上,每个车轮与路面的接触面积为 0.05 m ,如图丙所示,求前、后车轮对路面的压强差是多少帕 (不计驾驶员的重力)
5.(2024武汉三调)2023年5月,“恩平20-4 钻采平台”上部组块与下部海底导管架对接安装完成,创造了我国海上油气平台动力定位浮托安装总重的新纪录.“恩平20-4钻采平台”上部组块整体质量达 ,建造完成后,由我国自主建造的“海洋石油278”半潜船装载运输至海上安装现场.由于“恩平20-4钻采平台”上部组块整体质量超过常规海上浮吊极限,工程人员采用了如图所示的横向滑移装船方式进行装船.
(1)工程人员将平台上部组块固定在支撑框架上,再在码头和半潜船的甲板上铺上滑轨,然后通过牵引装置将组块缓缓拉到半潜船上.
①若要求支撑框架对滑轨的压强不能超过 ,不计支撑框架的重力,则支撑框架和滑轨之间的受力面积不能小于多少
②若牵引装置对支撑框架的拉力为 ,组块移动了约 200 m,则拉力在这个过程中大约做了多少功
(2)平台上部组块在横向滑移装船过程中,需要调整半潜船的压载水量,使甲板始终保持水平且与码头的地面相平.在将平台上部组块横向滑移至码头边缘时,工作人员控制压载水舱向外排出 的水,使低于码头的甲板上升至与码头平齐,牵引装置继续拉动支撑框架,当平台上部组块整体转移至甲板时,半潜船内压载水量为 整个装载过程中,若不考虑海平面的变化、不计支撑框架的重力,则半潜船向外排出的海水约多少m (ρ海水取 g取10 N/ kg)
6.(2024武汉)2024年4月19日,我国海洋油气生产平台“海基二号”总体结构完成安装,它刷新了高度、质量、作业水深和建造速度等多项亚洲纪录,“海基二号”由上部组块和水下的导管架组成.图甲是质量为6×10 t的“海洋石油-229”驳船将质量为 的导管架运载至安装海域的情景.(ρ海水取 g取10 N/ kg)
(1)如图甲所示,导管架的底部固定着4块面积非常大的钢板,这4块钢板的作用是 .“海基二号”在指定海域成功安装后,这4块钢板处于水深324 m的海底处,它们受到海水的压强是 Pa.
(2)导管架和驳船拖航的速度约为100m/min,它们到达240 km外的安装海域所需要的时间约为 h.导管架和驳船沿直线向右匀速航行时,若以图乙中的长方形表示驳船上的导管架,请在图中画出导管架受力的示意图.
(3)这次海上安装采用了滑移下水方式:工程人员将驳船船头水舱的水排出一部分,又向船尾水舱注入一部分水,使驳船小角度倾斜,最后将驳船和导管架之间的连接点切割分离,导管架就在自身重力作用下顶端朝前沿着轨道滑入海中.若驳船船头水舱排出的水和船尾水舱注入的水的体积分别为 和 时,导管架顶端浸入海水中的体积为200 m ,则驳船和固定在驳船上的导管架总共受到的浮力是多少
7.(2024江汉)2023 年12月,排水量为12万吨的国产LNG(液态天然气)运输船“峨眉号”成功下海,如图甲所示. LNG运输船建造难度极大,为了使天然气维持液态,货仓内温度必须控制在 以下,这就需要用到一种耐低温的材料——殷瓦钢.[g取 J
(1)殷瓦钢的焊接工艺难度极大,一块殷瓦钢板材厚度只有0.7mm,相当于一张薄薄白纸的厚度,焊接时,室温需控制在25℃.已知焊机的电功率为1400 W,每次焊接时可认为钢材表面只有 1 cm 的面积在均匀受热,为了不焊穿钢材(焊接时温度不能超过殷瓦钢的熔点1425 ℃),每次焊接的时间不能超过多少秒 (不考虑焊接时的热量损失)
(2)LNG运输船货仓内的温度极低,水蒸气在此温度下容易 (填物态变化名称)成小冰晶,因此在往货仓内装载LNG前必须将空气全部置换出去.图乙为置换过程的简化结构图,常温下先打开C口,将置换气体从A 管注入货仓底部,使空气从C口排尽.再关闭C口,将气态天然气从B管注入货仓上方,货仓中的置换气体将几乎全部从A管回到置换气体仓内.这样才能进行下一步的LNG 灌装工作.结合下列密度表中的数据分析,表中 (填气体名称)可以作为置换气体.
一些气体的密度(常温常压)
气体名称 天然气 空气 氖气 氦气 氩气
密度/(kg·m ) 0.717 4 1.29 0.9 0.134 7 1.784
(3)在灌装 LNG前,空载的LNG运输船需向水舱内注入压载水稳定船身,灌装 LNG的过程中再匀速排出压载水.某次工作中,先往水舱内注入一定量的压载水,此时船身有 的体积露出水面.再开始向运输船灌装LNG,当灌装了7.2万吨LNG后,运输船达到满载状态,此时船身有 的体积露出水面,水舱内压载水的体积为灌装前的 .此次灌装LNG 的过程用时160 h,这个过程中水舱每小时排出多少m 的压载水
8.(2024武昌)随着我国城镇化建设的快速发展,在城市排污过程中有时会面临着地下管道堵塞现象,需要进行清淤作业,但人工作业难度大、效率低,有时还发生中毒等危险.水下清淤机器人可以很好地解决这一难题.如图甲是我国自主研发的一款水下履带式清淤机器人,可通过计算机控制视频探头对管道内堵塞情况进行探查,应用专业设备对堵塞进行清除.其质量为500 kg,最大功率为5 000 W,清淤时最大行驶速度为1.8km/h.
(1)当该清淤机器人以最大功率,沿平直管道以最快速度匀速前进时,机器人行进时的牵引力是多少
(2)当该机器人在水下作业时,履带对受力面的压强为2 500 Pa,受力面积为1.08 m ,求机器人此时受到的浮力是多少
(3)在某次水下作业时,该机器人的机械臂抓起质量为30kg的石块,如图乙:AO与BO垂直,AO长40 cm,BO长30cm,CO长1.2m,CO与水平面夹角为60°,液压杆AB对OC的作用力沿AB方向,石块的重心在C点的正下方.求此时液压杆对机械臂OC的作用力是多少 (不计机械臂所受到的重力和浮力,石块的密度为 g取 10 N/ kg)
9.(2024江岸)漫步江城,风景正好!景观照明工程让武汉城市面貌焕然一新.在景观照明灯的安装过程中,施工人员常会用到如图甲所示的曲臂登高车进行高空作业.登高车空载时总质量8.5t,工作平台最大荷载460kg,车长8.9m,其简化图如图乙所示.该车机械臂(含工作平台)总质量2t,分为主臂和副臂,两臂均可在液压装置作用下转动,主臂MO长6m,副臂ON 可伸缩且可绕O点自由旋转.(g取10 N/kg)
(1)该车空载沿水平道路匀速直线行驶10km,若行驶过程中所受阻力为重力的0.06倍,则这一过程中牵引力所做的功为多少焦
(2)该车4个相同的车轮与地面接触良好,以最大荷载在水平地面上作业时,为控制车辆对地面的压强不超过 则每个车轮与地面接触面积不小于多少平方米
(3)如图乙所示,某次施工时,要将质量为100 kg的照明组件送至位置1处,液压杆先将主臂MO顶至与水平方向成60°角,再将副臂ON伸长至位置1处,此时机械臂和照明组件重心在A点,液压杆对主臂的作用力为( 卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动 至位置2处,此时机械臂重心在 B点,( 求卸下照明组件前后,液压杆对主臂作用力的变化量△F 是多少
专题训练四 计算综合训练
1.“新光华”轮由我国自主建造,是全球第二大半潜船.全船有118个压载水舱,船上由6台功率为4 750 kW的主柴油发电机组供电,自带最先进的DP2动态定位系统. g取10 N/ kg)
(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需时间最短为多少
(2)“新光华”轮甲板面积为 当它下潜至甲板没入水面下5m 时,甲板受到海水的压力为多少
(3)“希望6号”是我国为国外石油公司完整建造的圆筒型浮式生产储卸油平台,平台底面积为 总质量为3.2×10 t,现用“新光华”轮装载“希望6号”进行海上运送.装载前,甲板上表面与水面相平,此时压载水舱内水的体积为V ;装载时,先向压载水舱充水,船身变重,逐渐潜入水中,甲板到达水面下,再用拖轮将“希望6号”拖行到“新光华”轮甲板正上方;接下来,用压缩空气将压载水舱里的水排出一部分,船身变轻,甲板上浮,将“希望6号”托起,直至甲板上浮到上表面与水面再次相平,此时压载水舱内水的体积为V .压载水舱内水的体积V 和V 之差为多少
解:(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需最短时间:
(2)甲板没入水面下5m 时受到的压强: 10 N/kg×5m=5×10 Pa.
甲板受到海水的压力:
(3)由阿基米德原理和力的平衡知识可知压载水舱内减少的水的重力等于“希望6号”的重力,即
根据G=mg和m=ρV可得压载水舱内水的体积V 和V 之差
2.我国万米深潜作业次数和下潜人数位居世界首位.图甲所示为我国“奋斗者”号载人潜水器的海试现场.(g取10 N/kg)
(1)潜水器的前边固定着一个采样篮,里面放着海底沉积物采样器等工具,采样器是一个下端开口的圆柱形玻璃管.潜水器两侧各连着一只机械手臂,其中一只机械手臂的简化示意图如图乙所示,它由金属杆AB、OC和可以伸缩的液压杆AC 组成,C点为机械手臂和潜水器的连接点.当液压杆伸长或缩短时,会带动金属杆AB绕着O 点转动,金属杆 B端就会向上提或向下压采样器.
①请在图乙中画出水平金属杆的B端竖直向下压采样器时,采样器对金属杆AB 的力的示意图.
②若OA、OC和AC 的长分别是18 cm、24 cm和30cm,OB 的长是72 cm,这台机械手臂的液压杆AC对水平金属杆A 端的拉力是200 N,玻璃管水平的圆环形管口和海底沉积物的接触面积是2cm 时,则竖直状态下的玻璃管的圆环形管口对海底沉积物产生的压强是多少 (不考虑金属杆AB 和采样器受到的重力和浮力)
(2)总质量是36 t且处于悬浮状态的潜水器在海底完成作业后,会抛卸吸附在舱外的压载铁再上浮.为了确保舱内作业人员的安全,科学家们在设计“奋斗者”号时,可以让潜水器在不能抛卸压载铁时进行“断臂求生”,即让潜水器在深海抛掉两只机械手臂和采样篮等物体后再上浮.若某次深海演练抛掉质量是1.8t、体积是0.3m 的两只机械手臂和采样篮等物体,则此时潜水器受到的浮力是多少 浮力比重力大多少
解:(1)①如图所示.
②液压杆 AC 对水平金属杆 A 端拉力的力臂: 金属杆 B端对采样器的压力: 圆环形管口对海底沉积物产生的压强:
(2)潜水器处于悬浮状态,受到的总浮力为: 潜水器抛掉机械手臂等物体后,减小的浮力:△ 3=3×10 N,
减小的重力: 潜水器剩下的重力: 抛掉机械手臂等物体后潜水器受到的浮力: 抛掉机械手臂等物体后浮力比重力大△
3.钓鱼是目前最受欢迎的户外休闲活动之一.如图甲是人坐在钓箱上垂钓时的情景.该钓箱长50cm、宽30cm、高40cm,容量大、功能齐全,带有四只可升降脚,每只脚的高度都可以独立调节,使箱体上表面呈水平状态,方便人坐,空箱时,整箱质量仅6kg,轻便易携,还可以安装遮阳伞等配件.(g取10 N/ kg)
(1)如图乙,若每只脚的着地面积为4 cm ,空箱时,钓箱对水平地面的压强是多少
(2)空箱时,若将四只脚都收回箱内,钓箱可以近似看作是一个长方体,试通过计算说明,若将此钓箱放入水中静止时,钓箱将会处于什么状态
(3)在有风的天气,安装遮阳伞后,钓箱容易翻倒.图甲中,若风从左往右,整个装置的简图如图丙(无人坐).除遮阳伞外,钓箱(包括箱内的物品)重心可近似看作在钓箱的几何中心.遮阳伞(包括伞杆)的质量为4kg,重心在M点下方30cm处.已知遮阳伞承受风压的面积为1.2m ,某时刻风压为40 N/m ,风压作用点可视为M点.当人离开钓箱后,为了使钓箱不翻倒,至少应该在钓箱内放多少千克的重物 (空气对遮阳伞的升力忽略不计)
解:(1)空箱时,钓箱对水平地面的压力等于自身的重力,即F=G= mg=6kg×10 N/ kg=60 N,空箱时,钓箱对水平地面的压强:
(2)钓箱浸没时受到的浮力: N>60N,将此钓箱放入水中,浸没时其受到的浮力大于重力,钓箱会上浮,静止时,钓箱将会处于漂浮状态.
(3)遮阳伞承受风压的面积为1.2m ,某时刻风压为40 N/m ,则风力的大小: 48 N,根据杠杆平衡条件可得 即
解方程可得 钓箱内放重物的质量:
4.(2023武汉四调)如图甲所示是我国自主研发的一款水陆两栖车,它是一种结合了车与船的双重性能的特种车辆,既可以像汽车一样在陆地上行驶,又可以像船一样在水上浮渡.该车车长5.89m,轴距3.2m,整车质量2.4t,最大承载量600 kg.(g取10 N/ kg)
(1)水陆两栖车的轮胎表面有较深的花纹,是为了 增大 (选填“增大”或“减小”)摩擦.请在图乙中画出该车轮对地面压力的示意图.
(2)水陆两栖车能浮于水面,是因为特殊的车体和四个较大的相同车轮都提供了浮力.当该车满载在水中浮渡时,除四个车轮都浸没外,车体浸入水中的体积为2.4m ,则每个车轮排开水的体积是多少立方米
(3)当该车空载在水平路面上直线行驶时,若重力作用线到前轮轴的距离为1.2m,假设重心位于整车左、右两侧中轴线上,每个车轮与路面的接触面积为( ,如图丙所示,求前、后车轮对路面的压强差是多少帕 (不计驾驶员的重力)
解:(1)如图所示.
(2)水陆两栖车满载时漂浮在水面,则 ;由 可得两栖车排开水的总体积: 车体浸入水中的体积为2.4m ,则四个车轮排开水的体积: 所以每个车轮排开水的体积:
(3)水陆两栖车空载时的质量,则空车的重力: =2.4×10 N;前轮对地面的压力与地面对前轮的支持力是一对相互作用力,其大小相等,把车当作杠杆,以后轮为支点时,根据杠杆平衡条件 可得 即 2m--1.2m),解得 ;两栖车空载在水平路面上,竖直方向上受力平衡,地面对前后轮的支持力大小等于空车的重力,地面对后轮的支持力与后轮对地面的压力是一对相互作用力,则 N-15 000 N=9 000 N;前后轮对路面的压力差: 由于前后各2个轮子,故受力面积为2S,则前后轮对路面的压强差:
5.(2024武汉三调)2023年5月,“恩平20-4 钻采平台”上部组块与下部海底导管架对接安装完成,创造了我国海上油气平台动力定位浮托安装总重的新纪录.“恩平 20-4钻采平台”上部组块整体质量达1.55×10 t,,建造完成后,由我国自主建造的“海洋石油278”半潜船装载运输至海上安装现场.由于“恩平20-4钻采平台”上部组块整体质量超过常规海上浮吊极限,工程人员采用了如图所示的横向滑移装船方式进行装船.
(1)工程人员将平台上部组块固定在支撑框架上,再在码头和半潜船的甲板上铺上滑轨,然后通过牵引装置将组块缓缓拉到半潜船上.
①若要求支撑框架对滑轨的压强不能超过2×10 Pa,不计支撑框架的重力,则支撑框架和滑轨之间的受力面积不能小于多少
②若牵引装置对支撑框架的拉力为1.2×10 N,组块移动了约 200m,则拉力在这个过程中大约做了多少功
(2)平台上部组块在横向滑移装船过程中,需要调整半潜船的压载水量,使甲板始终保持水平且与码头的地面相平.在将平台上部组块横向滑移至码头边缘时,工作人员控制压载水舱向外排出 的水,使低于码头的甲板上升至与码头平齐,牵引装置继续拉动支撑框架,当平台上部组块整体转移至甲板时,半潜船内压载水量为1.6×10 t.整个装载过程中,若不考虑海平面的变化、不计支撑框架的重力,则半潜船向外排出的海水约多少m (ρ海水取1.0×10 kg/m ,g取10 N/ kg)
解:(1)①平台上部组块的重力:G
支撑框架和滑轨之间的受力面积不能小于:
②拉力在这个过程中做的功:
(2)为了使低于码头的甲板上升至与码头平齐,第一次半潜船向外排出海水的体积:
当组块整体转移至半潜船的甲板上时,半潜船排开水的体积没有改变,即半潜船受到的浮力没有改变.又因为半潜船是漂浮的,所以半潜船的总重也没有改变.
因此半潜船向外排出海水的重力:
第二次半潜船向外排出海水的体积: 10 m ,整个装载过程中,则半潜船向外排出的海水:\
6.(2024武汉)2024年4月19日,我国海洋油气生产平台“海基二号”总体结构完成安装,它刷新了高度、质量、作业水深和建造速度等多项亚洲纪录,“海基二号”由上部组块和水下的导管架组成.图甲是质量为( 的“海洋石油-229”驳船将质量为 的导管架运载至安装海域的情景.(ρ海水取 g取10 N/ kg)
(1)如图甲所示,导管架的底部固定着4块面积非常大的钢板,这4块钢板的作用是 增大受力面积,减小压强 .“海基二号”在指定海域成功安装后,这4块钢板处于水深324m的海底处,它们受到海水的压强是 3.24×10 Pa.
(2)导管架和驳船拖航的速度约为100m/min,它们到达240 km外的安装海域所需要的时间约为 40 h.导管架和驳船沿直线向右匀速航行时,若以图乙中的长方形表示驳船上的导管架,请在图中画出导管架受力的示意图.
(3)这次海上安装采用了滑移下水方式:工程人员将驳船船头水舱的水排出一部分,又向船尾水舱注入一部分水,使驳船小角度倾斜,最后将驳船和导管架之间的连接点切割分离,导管架就在自身重力作用下顶端朝前沿着轨道滑入海中.若驳船船头水舱排出的水和船尾水舱注入的水的体积分别为 和 时,导管架顶端浸入海水中的体积为200m ,则驳船和固定在驳船上的导管架总共受到的浮力是多少
解:(2)如图所示.
(3)驳船小角度倾斜前,驳船和导管架的总重力:
G ,
驳船小角度倾斜时,水舱中水增加的重力:
△C 0 N,
驳船小角度倾斜时处于漂浮状态,总浮力等于总重力,即
F J.
7.(2024江汉)2023 年12月,排水量为12万吨的国产LNG(液态天然气)运输船“峨眉号”成功下海,如图甲所示. LNG运输船建造难度极大,为了使天然气维持液态,货仓内温度必须控制在—163℃以下,这就需要用到一种耐低温的材料——殷瓦钢.[g取10 N/kg,m海水= ]
(1)殷瓦钢的焊接工艺难度极大,一块殷瓦钢板材厚度只有0.7mm,相当于一张薄薄白纸的厚度,焊接时,室温需控制在 已知焊机的电功率为1400 W,每次焊接时可认为钢材表面只有 的面积在均匀受热,为了不焊穿钢材(焊接时温度不能超过殷瓦钢的熔点 每次焊接的时间不能超过多少秒 (不考虑焊接时的热量损失)
(2)LNG运输船货仓内的温度极低,水蒸气在此温度下容易凝华 (填物态变化名称)成小冰晶,因此在往货仓内装载LNG前必须将空气全部置换出去.图乙为置换过程的简化结构图,常温下先打开C口,将置换气体从A 管注入货仓底部,使空气从C口排尽.再关闭C口,将气态天然气从B管注入货仓上方,货仓中的置换气体将几乎全部从A管回到置换气体仓内.这样才能进行下一步的 LNG灌装工作.结合下列密度表中的数据分析,表中 氩气 (填气体名称)可以作为置换气体.
一些气体的密度(常温常压)
气体名称 天然气 空气 氖气 氦气 氩气
密度/(kg·m ) 0.717 4 1.29 0.9 0.134 7 1.784
(3)在灌装 LNG前,空载的LNG运输船需向水舱内注入压载水稳定船身,灌装 LNG的过程中再匀速排出压载水.某次工作中,先往水舱内注入一定量的压载水,此时船身有 的体积露出水面.再开始向运输船灌装LNG,当灌装了7.2万吨LNG后,运输船达到满载状态,此时船身有 的体积露出水面,水舱内压载水的体积为灌装前的 .此次灌装LNG 的过程用时160 h,这个过程中水舱每小时排出多少m 的压载水
解:(1)1 cm 殷瓦钢的体积:
1 cm 殷瓦钢的质量:开始后每一直腹瓦钢 Vexk的=8×10 kg/m ×7×10 m =5.6×10 kg,
钢材吸收的最大热量:Q吸=C极瓦锅 n最无限△t=0.5×10 J/(kg·℃)×5.6×10 kg×(1425℃-25℃)=392J,由题意知,不考虑焊接时的热量损失,则
则每次焊接的最大时间:
(3)由题意知,灌装了7.2万吨LNG后,运输船达到“满载状态”,此时运输船排开水的质量: 10 kg,运输船排开水的体积:
灌装的LNG 受到的重力: 由阿基米德原理可得,运输船满载时受到的浮力:
由于运输船处于漂浮状态,则其受到的浮力等于船和灌装的LNG以及压载水受到的总重力,即
灌装LNG 前,运输船往水舱内注入一定量的压载水,此时船身有 的体积露出水面,则此时运输船排开水的体积
此时运输船受到的浮力 由于运输船处于漂浮状态,则其受到的浮力等于船和压载水受到的总重力,即 由题意知,运输船达到满载状态,水舱内压载水的体积为灌装前的
由G= mg=ρgVi可得
由①②解得
则水舱排出水的重力:
排出水的质量:
排出水的体积:
则整个灌装过程,水舱每小时排出水的体积:
8.(2024武昌)随着我国城镇化建设的快速发展,在城市排污过程中有时会面临着地下管道堵塞现象,需要进行清淤作业,但人工作业难度大、效率低,有时还发生中毒等危险.水下清淤机器人可以很好地解决这一难题.如图甲是我国自主研发的一款水下履带式清淤机器人,可通过计算机控制视频探头对管道内堵塞情况进行探查,应用专业设备对堵塞进行清除.其质量为500 kg,最大功率为5 000 W,清淤时最大行驶速度为1.8km/h.
(1)当该清淤机器人以最大功率,沿平直管道以最快速度匀速前进时,机器人行进时的牵引力是多少
(2)当该机器人在水下作业时,履带对受力面的压强为2 500 Pa,受力面积为1.08 m ,求机器人此时受到的浮力是多少
(3)在某次水下作业时,该机器人的机械臂抓起质量为30kg的石块,如图乙:AO与BO垂直,AO长40cm,BO长30cm,CO长1.2m,CO与水平面夹角为60°,液压杆AB对OC的作用力沿AB方向,石块的重心在C点的正下方.求此时液压杆对机械臂OC的作用力是多少 (不计机械臂所受到的重力和浮力,石块的密度为 g取10 N/ kg)
解: 由 =Fv可得,机器人行进时的牵引力:
(2)履带对受力面的压力:
由于力的作用是相互的,履带受到受力面的支持力
对机器人进行受力分析可知,其受到向上的浮力和支持力和向下的重力,
受到的重力:
则受到的浮力:
(3)石块的重力:Gx=m=g=30kg×10 N/ kg=300N,
石块的体积:
则石块受到的浮力:F
则杠杆C点受到的阻力:
液压杆对机械臂OC的作用力为动力F .在图中分别作出动力、动力臂、阻力和阻力臂,如图所示.
运用数学知识可求得动力臂 阻力臂 根据杠杆平衡条件 则此时液压杆对机械臂OC的作用力
9.(2024江岸)漫步江城,风景正好!景观照明工程让武汉城市面貌焕然一新.在景观照明灯的安装过程中,施工人员常会用到如图甲所示的曲臂登高车进行高空作业.登高车空载时总质量8.5t,工作平台最大荷载460kg,车长8.9m,其简化图如图乙所示.该车机械臂(含工作平台)总质量2t,分为主臂和副臂,两臂均可在液压装置作用下转动,主臂MO长6m,副臂ON 可伸缩且可绕O点自由旋转.(g取10 N/kg)
(1)该车空载沿水平道路匀速直线行驶10 km,若行驶过程中所受阻力为重力的0.06倍,则这一过程中牵引力所做的功为多少焦
(2)该车4个相同的车轮与地面接触良好,以最大荷载在水平地面上作业时,为控制车辆对地面的压强不超过 则每个车轮与地面接触面积不小于多少平方米
(3)如图乙所示,某次施工时,要将质量为100kg的照明组件送至位置1处,液压杆先将主臂MO顶至与水平方向成60°角,再将副臂ON伸长至位置1处,此时机械臂和照明组件重心在 A 点,液压杆对主臂的作用力为( .卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动120°至位置2处,此时机械臂重心在B点,OA=4m,OB=2m,求卸下照明组件前后,液压杆对主臂作用力的变化量△F 是多少
解:(1)由题意知,登高车空载时总质量8.5t,行驶过程中所受阻力为重力的0.06倍,该车空载沿水平道路匀速行驶过程中处于平衡状态,则牵引力等于阻力,则 F=∫=0.06G=0.06mg=0.06
牵引力所做的功:
(2)以最大荷载在水平地面上作业时,车对地面的压力: +460kg×10 N/ kg=8.96×10 N,
为控制车辆对地面的压强不超过7×10 Pa,则每个车轮与地面接触面积不小于:
(3)机械臂与照明组件所受的重力:G =2×10 kg×10 N/ kg+100kg×10 N/ kg=2.1×10 N,AM-AO+OM=4m+6m=10m,
由数学知识可知,阻力臂:
则根据杠杆平衡的条件可知
解得
卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动120°至位置2处,此时机械臂重心在B点,机械臂所受重力:
由数学知识可知,阻力臂:
则根据杠杆平衡的条件可知
则动力:
因此卸下照明组件前后,液压杆对主臂作用力的变化量:
专题训练四 计算综合训练
1.“新光华”轮由我国自主建造,是全球第二大半潜船.全船有118个压载水舱,船上由6台功率为4 750 kW的主柴油发电机组供电,自带最先进的DP2动态定位系统. g取10 N/ kg)
(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需时间最短为多少
(2)“新光华”轮甲板面积为 ,当它下潜至甲板没入水面下5m 时,甲板受到海水的压力为多少
(3)“希望6号”是我国为国外石油公司完整建造的圆筒型浮式生产储卸油平台,平台底面积为 总质量为 现用“新光华”轮装载“希望6号”进行海上运送.装载前,甲板上表面与水面相平,此时压载水舱内水的体积为V ;装载时,先向压载水舱充水,船身变重,逐渐潜入水中,甲板到达水面下,再用拖轮将“希望6号”拖行到“新光华”轮甲板正上方;接下来,用压缩空气将压载水舱里的水排出一部分,船身变轻,甲板上浮,将“希望6号”托起,直至甲板上浮到上表面与水面再次相平,此时压载水舱内水的体积为V .压载水舱内水的体积V 和V 之差为多少
2.我国万米深潜作业次数和下潜人数位居世界首位.图甲所示为我国“奋斗者”号载人潜水器的海试现场.(g取10 N/kg)
(1)潜水器的前边固定着一个采样篮,里面放着海底沉积物采样器等工具,采样器是一个下端开口的圆柱形玻璃管.潜水器两侧各连着一只机械手臂,其中一只机械手臂的简化示意图如图乙所示,它由金属杆AB、OC和可以伸缩的液压杆AC组成,C点为机械手臂和潜水器的连接点.当液压杆伸长或缩短时,会带动金属杆 AB绕着O点转动,金属杆 B端就会向上提或向下压采样器.
①请在图乙中画出水平金属杆的B端竖直向下压采样器时,采样器对金属杆AB的力的示意图.
②若OA、OC和AC 的长分别是18 cm、24 cm和30cm,OB的长是72 cm,这台机械手臂的液压杆AC对水平金属杆A 端的拉力是200 N,玻璃管水平的圆环形管口和海底沉积物的接触面积是2cm 时,则竖直状态下的玻璃管的圆环形管口对海底沉积物产生的压强是多少 (不考虑金属杆AB 和采样器受到的重力和浮力)
(2)总质量是36 t且处于悬浮状态的潜水器在海底完成作业后,会抛卸吸附在舱外的压载铁再上浮.为了确保舱内作业人员的安全,科学家们在设计“奋斗者”号时,可以让潜水器在不能抛卸压载铁时进行“断臂求生”,即让潜水器在深海抛掉两只机械手臂和采样篮等物体后再上浮.若某次深海演练抛掉质量是1.8t、体积是0.3m 的两只机械手臂和采样篮等物体,则此时潜水器受到的浮力是多少 浮力比重力大多少
3.钓鱼是目前最受欢迎的户外休闲活动之一.如图甲是人坐在钓箱上垂钓时的情景.该钓箱长50cm、宽30cm、高40cm,容量大、功能齐全,带有四只可升降脚,每只脚的高度都可以独立调节,使箱体上表面呈水平状态,方便人坐,空箱时,整箱质量仅6kg,轻便易携,还可以安装遮阳伞等配件.(g取 10 N/ kg)
(1)如图乙,若每只脚的着地面积为 空箱时,钓箱对水平地面的压强是多少
(2)空箱时,若将四只脚都收回箱内,钓箱可以近似看作是一个长方体,试通过计算说明,若将此钓箱放入水中静止时,钓箱将会处于什么状态
(3)在有风的天气,安装遮阳伞后,钓箱容易翻倒.图甲中,若风从左往右,整个装置的简图如图丙(无人坐).除遮阳伞外,钓箱(包括箱内的物品)重心可近似看作在钓箱的几何中心.遮阳伞(包括伞杆)的质量为4k g,重心在M点下方30cm 处.已知遮阳伞承受风压的面积为
3.某时刻风压为 风压作用点可视为M点.当人离开钓箱后,为了使钓箱不翻倒,至少应该在钓箱内放多少千克的重物 (空气对遮阳伞的升力忽略不计)
4.如图甲所示是我国自主研发的一款水陆两栖车,它是一种结合了车与船的双重性能的特种车辆,既可以像汽车一样在陆地上行驶,又可以像船一样在水上浮渡.该车车长5.89m,轴距3.2m,整车质量2.4 t,最大承载量600 kg.(g取10 N/ kg)
(1)水陆两栖车的轮胎表面有较深的花纹,是为了 (选填“增大”或“减小”)摩擦.请在图乙中画出该车轮对地面压力的示意图.
(2)水陆两栖车能浮于水面,是因为特殊的车体和四个较大的相同车轮都提供了浮力.当该车满载在水中浮渡时,除四个车轮都浸没外,车体浸入水中的体积为2.4m ,则每个车轮排开水的体积是多少立方米
(3)当该车空载在水平路面上直线行驶时,若重力作用线到前轮轴的距离为1.2m,假设重心位于整车左、右两侧中轴线上,每个车轮与路面的接触面积为 0.05 m ,如图丙所示,求前、后车轮对路面的压强差是多少帕 (不计驾驶员的重力)
5.(2024武汉三调)2023年5月,“恩平20-4 钻采平台”上部组块与下部海底导管架对接安装完成,创造了我国海上油气平台动力定位浮托安装总重的新纪录.“恩平20-4钻采平台”上部组块整体质量达 ,建造完成后,由我国自主建造的“海洋石油278”半潜船装载运输至海上安装现场.由于“恩平20-4钻采平台”上部组块整体质量超过常规海上浮吊极限,工程人员采用了如图所示的横向滑移装船方式进行装船.
(1)工程人员将平台上部组块固定在支撑框架上,再在码头和半潜船的甲板上铺上滑轨,然后通过牵引装置将组块缓缓拉到半潜船上.
①若要求支撑框架对滑轨的压强不能超过 ,不计支撑框架的重力,则支撑框架和滑轨之间的受力面积不能小于多少
②若牵引装置对支撑框架的拉力为 ,组块移动了约 200 m,则拉力在这个过程中大约做了多少功
(2)平台上部组块在横向滑移装船过程中,需要调整半潜船的压载水量,使甲板始终保持水平且与码头的地面相平.在将平台上部组块横向滑移至码头边缘时,工作人员控制压载水舱向外排出 的水,使低于码头的甲板上升至与码头平齐,牵引装置继续拉动支撑框架,当平台上部组块整体转移至甲板时,半潜船内压载水量为 整个装载过程中,若不考虑海平面的变化、不计支撑框架的重力,则半潜船向外排出的海水约多少m (ρ海水取 g取10 N/ kg)
6.(2024武汉)2024年4月19日,我国海洋油气生产平台“海基二号”总体结构完成安装,它刷新了高度、质量、作业水深和建造速度等多项亚洲纪录,“海基二号”由上部组块和水下的导管架组成.图甲是质量为6×10 t的“海洋石油-229”驳船将质量为 的导管架运载至安装海域的情景.(ρ海水取 g取10 N/ kg)
(1)如图甲所示,导管架的底部固定着4块面积非常大的钢板,这4块钢板的作用是 .“海基二号”在指定海域成功安装后,这4块钢板处于水深324 m的海底处,它们受到海水的压强是 Pa.
(2)导管架和驳船拖航的速度约为100m/min,它们到达240 km外的安装海域所需要的时间约为 h.导管架和驳船沿直线向右匀速航行时,若以图乙中的长方形表示驳船上的导管架,请在图中画出导管架受力的示意图.
(3)这次海上安装采用了滑移下水方式:工程人员将驳船船头水舱的水排出一部分,又向船尾水舱注入一部分水,使驳船小角度倾斜,最后将驳船和导管架之间的连接点切割分离,导管架就在自身重力作用下顶端朝前沿着轨道滑入海中.若驳船船头水舱排出的水和船尾水舱注入的水的体积分别为 和 时,导管架顶端浸入海水中的体积为200 m ,则驳船和固定在驳船上的导管架总共受到的浮力是多少
7.(2024江汉)2023 年12月,排水量为12万吨的国产LNG(液态天然气)运输船“峨眉号”成功下海,如图甲所示. LNG运输船建造难度极大,为了使天然气维持液态,货仓内温度必须控制在 以下,这就需要用到一种耐低温的材料——殷瓦钢.[g取 J
(1)殷瓦钢的焊接工艺难度极大,一块殷瓦钢板材厚度只有0.7mm,相当于一张薄薄白纸的厚度,焊接时,室温需控制在25℃.已知焊机的电功率为1400 W,每次焊接时可认为钢材表面只有 1 cm 的面积在均匀受热,为了不焊穿钢材(焊接时温度不能超过殷瓦钢的熔点1425 ℃),每次焊接的时间不能超过多少秒 (不考虑焊接时的热量损失)
(2)LNG运输船货仓内的温度极低,水蒸气在此温度下容易 (填物态变化名称)成小冰晶,因此在往货仓内装载LNG前必须将空气全部置换出去.图乙为置换过程的简化结构图,常温下先打开C口,将置换气体从A 管注入货仓底部,使空气从C口排尽.再关闭C口,将气态天然气从B管注入货仓上方,货仓中的置换气体将几乎全部从A管回到置换气体仓内.这样才能进行下一步的LNG 灌装工作.结合下列密度表中的数据分析,表中 (填气体名称)可以作为置换气体.
一些气体的密度(常温常压)
气体名称 天然气 空气 氖气 氦气 氩气
密度/(kg·m ) 0.717 4 1.29 0.9 0.134 7 1.784
(3)在灌装 LNG前,空载的LNG运输船需向水舱内注入压载水稳定船身,灌装 LNG的过程中再匀速排出压载水.某次工作中,先往水舱内注入一定量的压载水,此时船身有 的体积露出水面.再开始向运输船灌装LNG,当灌装了7.2万吨LNG后,运输船达到满载状态,此时船身有 的体积露出水面,水舱内压载水的体积为灌装前的 .此次灌装LNG 的过程用时160 h,这个过程中水舱每小时排出多少m 的压载水
8.(2024武昌)随着我国城镇化建设的快速发展,在城市排污过程中有时会面临着地下管道堵塞现象,需要进行清淤作业,但人工作业难度大、效率低,有时还发生中毒等危险.水下清淤机器人可以很好地解决这一难题.如图甲是我国自主研发的一款水下履带式清淤机器人,可通过计算机控制视频探头对管道内堵塞情况进行探查,应用专业设备对堵塞进行清除.其质量为500 kg,最大功率为5 000 W,清淤时最大行驶速度为1.8km/h.
(1)当该清淤机器人以最大功率,沿平直管道以最快速度匀速前进时,机器人行进时的牵引力是多少
(2)当该机器人在水下作业时,履带对受力面的压强为2 500 Pa,受力面积为1.08 m ,求机器人此时受到的浮力是多少
(3)在某次水下作业时,该机器人的机械臂抓起质量为30kg的石块,如图乙:AO与BO垂直,AO长40 cm,BO长30cm,CO长1.2m,CO与水平面夹角为60°,液压杆AB对OC的作用力沿AB方向,石块的重心在C点的正下方.求此时液压杆对机械臂OC的作用力是多少 (不计机械臂所受到的重力和浮力,石块的密度为 g取 10 N/ kg)
9.(2024江岸)漫步江城,风景正好!景观照明工程让武汉城市面貌焕然一新.在景观照明灯的安装过程中,施工人员常会用到如图甲所示的曲臂登高车进行高空作业.登高车空载时总质量8.5t,工作平台最大荷载460kg,车长8.9m,其简化图如图乙所示.该车机械臂(含工作平台)总质量2t,分为主臂和副臂,两臂均可在液压装置作用下转动,主臂MO长6m,副臂ON 可伸缩且可绕O点自由旋转.(g取10 N/kg)
(1)该车空载沿水平道路匀速直线行驶10km,若行驶过程中所受阻力为重力的0.06倍,则这一过程中牵引力所做的功为多少焦
(2)该车4个相同的车轮与地面接触良好,以最大荷载在水平地面上作业时,为控制车辆对地面的压强不超过 则每个车轮与地面接触面积不小于多少平方米
(3)如图乙所示,某次施工时,要将质量为100 kg的照明组件送至位置1处,液压杆先将主臂MO顶至与水平方向成60°角,再将副臂ON伸长至位置1处,此时机械臂和照明组件重心在A点,液压杆对主臂的作用力为( 卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动 至位置2处,此时机械臂重心在 B点,( 求卸下照明组件前后,液压杆对主臂作用力的变化量△F 是多少
专题训练四 计算综合训练
1.“新光华”轮由我国自主建造,是全球第二大半潜船.全船有118个压载水舱,船上由6台功率为4 750 kW的主柴油发电机组供电,自带最先进的DP2动态定位系统. g取10 N/ kg)
(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需时间最短为多少
(2)“新光华”轮甲板面积为 当它下潜至甲板没入水面下5m 时,甲板受到海水的压力为多少
(3)“希望6号”是我国为国外石油公司完整建造的圆筒型浮式生产储卸油平台,平台底面积为 总质量为3.2×10 t,现用“新光华”轮装载“希望6号”进行海上运送.装载前,甲板上表面与水面相平,此时压载水舱内水的体积为V ;装载时,先向压载水舱充水,船身变重,逐渐潜入水中,甲板到达水面下,再用拖轮将“希望6号”拖行到“新光华”轮甲板正上方;接下来,用压缩空气将压载水舱里的水排出一部分,船身变轻,甲板上浮,将“希望6号”托起,直至甲板上浮到上表面与水面再次相平,此时压载水舱内水的体积为V .压载水舱内水的体积V 和V 之差为多少
解:(1)“新光华”轮在海面上以25 km/h的航速定速航行至500 km处的某海域,所需最短时间:
(2)甲板没入水面下5m 时受到的压强: 10 N/kg×5m=5×10 Pa.
甲板受到海水的压力:
(3)由阿基米德原理和力的平衡知识可知压载水舱内减少的水的重力等于“希望6号”的重力,即
根据G=mg和m=ρV可得压载水舱内水的体积V 和V 之差
2.我国万米深潜作业次数和下潜人数位居世界首位.图甲所示为我国“奋斗者”号载人潜水器的海试现场.(g取10 N/kg)
(1)潜水器的前边固定着一个采样篮,里面放着海底沉积物采样器等工具,采样器是一个下端开口的圆柱形玻璃管.潜水器两侧各连着一只机械手臂,其中一只机械手臂的简化示意图如图乙所示,它由金属杆AB、OC和可以伸缩的液压杆AC 组成,C点为机械手臂和潜水器的连接点.当液压杆伸长或缩短时,会带动金属杆AB绕着O 点转动,金属杆 B端就会向上提或向下压采样器.
①请在图乙中画出水平金属杆的B端竖直向下压采样器时,采样器对金属杆AB 的力的示意图.
②若OA、OC和AC 的长分别是18 cm、24 cm和30cm,OB 的长是72 cm,这台机械手臂的液压杆AC对水平金属杆A 端的拉力是200 N,玻璃管水平的圆环形管口和海底沉积物的接触面积是2cm 时,则竖直状态下的玻璃管的圆环形管口对海底沉积物产生的压强是多少 (不考虑金属杆AB 和采样器受到的重力和浮力)
(2)总质量是36 t且处于悬浮状态的潜水器在海底完成作业后,会抛卸吸附在舱外的压载铁再上浮.为了确保舱内作业人员的安全,科学家们在设计“奋斗者”号时,可以让潜水器在不能抛卸压载铁时进行“断臂求生”,即让潜水器在深海抛掉两只机械手臂和采样篮等物体后再上浮.若某次深海演练抛掉质量是1.8t、体积是0.3m 的两只机械手臂和采样篮等物体,则此时潜水器受到的浮力是多少 浮力比重力大多少
解:(1)①如图所示.
②液压杆 AC 对水平金属杆 A 端拉力的力臂: 金属杆 B端对采样器的压力: 圆环形管口对海底沉积物产生的压强:
(2)潜水器处于悬浮状态,受到的总浮力为: 潜水器抛掉机械手臂等物体后,减小的浮力:△ 3=3×10 N,
减小的重力: 潜水器剩下的重力: 抛掉机械手臂等物体后潜水器受到的浮力: 抛掉机械手臂等物体后浮力比重力大△
3.钓鱼是目前最受欢迎的户外休闲活动之一.如图甲是人坐在钓箱上垂钓时的情景.该钓箱长50cm、宽30cm、高40cm,容量大、功能齐全,带有四只可升降脚,每只脚的高度都可以独立调节,使箱体上表面呈水平状态,方便人坐,空箱时,整箱质量仅6kg,轻便易携,还可以安装遮阳伞等配件.(g取10 N/ kg)
(1)如图乙,若每只脚的着地面积为4 cm ,空箱时,钓箱对水平地面的压强是多少
(2)空箱时,若将四只脚都收回箱内,钓箱可以近似看作是一个长方体,试通过计算说明,若将此钓箱放入水中静止时,钓箱将会处于什么状态
(3)在有风的天气,安装遮阳伞后,钓箱容易翻倒.图甲中,若风从左往右,整个装置的简图如图丙(无人坐).除遮阳伞外,钓箱(包括箱内的物品)重心可近似看作在钓箱的几何中心.遮阳伞(包括伞杆)的质量为4kg,重心在M点下方30cm处.已知遮阳伞承受风压的面积为1.2m ,某时刻风压为40 N/m ,风压作用点可视为M点.当人离开钓箱后,为了使钓箱不翻倒,至少应该在钓箱内放多少千克的重物 (空气对遮阳伞的升力忽略不计)
解:(1)空箱时,钓箱对水平地面的压力等于自身的重力,即F=G= mg=6kg×10 N/ kg=60 N,空箱时,钓箱对水平地面的压强:
(2)钓箱浸没时受到的浮力: N>60N,将此钓箱放入水中,浸没时其受到的浮力大于重力,钓箱会上浮,静止时,钓箱将会处于漂浮状态.
(3)遮阳伞承受风压的面积为1.2m ,某时刻风压为40 N/m ,则风力的大小: 48 N,根据杠杆平衡条件可得 即
解方程可得 钓箱内放重物的质量:
4.(2023武汉四调)如图甲所示是我国自主研发的一款水陆两栖车,它是一种结合了车与船的双重性能的特种车辆,既可以像汽车一样在陆地上行驶,又可以像船一样在水上浮渡.该车车长5.89m,轴距3.2m,整车质量2.4t,最大承载量600 kg.(g取10 N/ kg)
(1)水陆两栖车的轮胎表面有较深的花纹,是为了 增大 (选填“增大”或“减小”)摩擦.请在图乙中画出该车轮对地面压力的示意图.
(2)水陆两栖车能浮于水面,是因为特殊的车体和四个较大的相同车轮都提供了浮力.当该车满载在水中浮渡时,除四个车轮都浸没外,车体浸入水中的体积为2.4m ,则每个车轮排开水的体积是多少立方米
(3)当该车空载在水平路面上直线行驶时,若重力作用线到前轮轴的距离为1.2m,假设重心位于整车左、右两侧中轴线上,每个车轮与路面的接触面积为( ,如图丙所示,求前、后车轮对路面的压强差是多少帕 (不计驾驶员的重力)
解:(1)如图所示.
(2)水陆两栖车满载时漂浮在水面,则 ;由 可得两栖车排开水的总体积: 车体浸入水中的体积为2.4m ,则四个车轮排开水的体积: 所以每个车轮排开水的体积:
(3)水陆两栖车空载时的质量,则空车的重力: =2.4×10 N;前轮对地面的压力与地面对前轮的支持力是一对相互作用力,其大小相等,把车当作杠杆,以后轮为支点时,根据杠杆平衡条件 可得 即 2m--1.2m),解得 ;两栖车空载在水平路面上,竖直方向上受力平衡,地面对前后轮的支持力大小等于空车的重力,地面对后轮的支持力与后轮对地面的压力是一对相互作用力,则 N-15 000 N=9 000 N;前后轮对路面的压力差: 由于前后各2个轮子,故受力面积为2S,则前后轮对路面的压强差:
5.(2024武汉三调)2023年5月,“恩平20-4 钻采平台”上部组块与下部海底导管架对接安装完成,创造了我国海上油气平台动力定位浮托安装总重的新纪录.“恩平 20-4钻采平台”上部组块整体质量达1.55×10 t,,建造完成后,由我国自主建造的“海洋石油278”半潜船装载运输至海上安装现场.由于“恩平20-4钻采平台”上部组块整体质量超过常规海上浮吊极限,工程人员采用了如图所示的横向滑移装船方式进行装船.
(1)工程人员将平台上部组块固定在支撑框架上,再在码头和半潜船的甲板上铺上滑轨,然后通过牵引装置将组块缓缓拉到半潜船上.
①若要求支撑框架对滑轨的压强不能超过2×10 Pa,不计支撑框架的重力,则支撑框架和滑轨之间的受力面积不能小于多少
②若牵引装置对支撑框架的拉力为1.2×10 N,组块移动了约 200m,则拉力在这个过程中大约做了多少功
(2)平台上部组块在横向滑移装船过程中,需要调整半潜船的压载水量,使甲板始终保持水平且与码头的地面相平.在将平台上部组块横向滑移至码头边缘时,工作人员控制压载水舱向外排出 的水,使低于码头的甲板上升至与码头平齐,牵引装置继续拉动支撑框架,当平台上部组块整体转移至甲板时,半潜船内压载水量为1.6×10 t.整个装载过程中,若不考虑海平面的变化、不计支撑框架的重力,则半潜船向外排出的海水约多少m (ρ海水取1.0×10 kg/m ,g取10 N/ kg)
解:(1)①平台上部组块的重力:G
支撑框架和滑轨之间的受力面积不能小于:
②拉力在这个过程中做的功:
(2)为了使低于码头的甲板上升至与码头平齐,第一次半潜船向外排出海水的体积:
当组块整体转移至半潜船的甲板上时,半潜船排开水的体积没有改变,即半潜船受到的浮力没有改变.又因为半潜船是漂浮的,所以半潜船的总重也没有改变.
因此半潜船向外排出海水的重力:
第二次半潜船向外排出海水的体积: 10 m ,整个装载过程中,则半潜船向外排出的海水:\
6.(2024武汉)2024年4月19日,我国海洋油气生产平台“海基二号”总体结构完成安装,它刷新了高度、质量、作业水深和建造速度等多项亚洲纪录,“海基二号”由上部组块和水下的导管架组成.图甲是质量为( 的“海洋石油-229”驳船将质量为 的导管架运载至安装海域的情景.(ρ海水取 g取10 N/ kg)
(1)如图甲所示,导管架的底部固定着4块面积非常大的钢板,这4块钢板的作用是 增大受力面积,减小压强 .“海基二号”在指定海域成功安装后,这4块钢板处于水深324m的海底处,它们受到海水的压强是 3.24×10 Pa.
(2)导管架和驳船拖航的速度约为100m/min,它们到达240 km外的安装海域所需要的时间约为 40 h.导管架和驳船沿直线向右匀速航行时,若以图乙中的长方形表示驳船上的导管架,请在图中画出导管架受力的示意图.
(3)这次海上安装采用了滑移下水方式:工程人员将驳船船头水舱的水排出一部分,又向船尾水舱注入一部分水,使驳船小角度倾斜,最后将驳船和导管架之间的连接点切割分离,导管架就在自身重力作用下顶端朝前沿着轨道滑入海中.若驳船船头水舱排出的水和船尾水舱注入的水的体积分别为 和 时,导管架顶端浸入海水中的体积为200m ,则驳船和固定在驳船上的导管架总共受到的浮力是多少
解:(2)如图所示.
(3)驳船小角度倾斜前,驳船和导管架的总重力:
G ,
驳船小角度倾斜时,水舱中水增加的重力:
△C 0 N,
驳船小角度倾斜时处于漂浮状态,总浮力等于总重力,即
F J.
7.(2024江汉)2023 年12月,排水量为12万吨的国产LNG(液态天然气)运输船“峨眉号”成功下海,如图甲所示. LNG运输船建造难度极大,为了使天然气维持液态,货仓内温度必须控制在—163℃以下,这就需要用到一种耐低温的材料——殷瓦钢.[g取10 N/kg,m海水= ]
(1)殷瓦钢的焊接工艺难度极大,一块殷瓦钢板材厚度只有0.7mm,相当于一张薄薄白纸的厚度,焊接时,室温需控制在 已知焊机的电功率为1400 W,每次焊接时可认为钢材表面只有 的面积在均匀受热,为了不焊穿钢材(焊接时温度不能超过殷瓦钢的熔点 每次焊接的时间不能超过多少秒 (不考虑焊接时的热量损失)
(2)LNG运输船货仓内的温度极低,水蒸气在此温度下容易凝华 (填物态变化名称)成小冰晶,因此在往货仓内装载LNG前必须将空气全部置换出去.图乙为置换过程的简化结构图,常温下先打开C口,将置换气体从A 管注入货仓底部,使空气从C口排尽.再关闭C口,将气态天然气从B管注入货仓上方,货仓中的置换气体将几乎全部从A管回到置换气体仓内.这样才能进行下一步的 LNG灌装工作.结合下列密度表中的数据分析,表中 氩气 (填气体名称)可以作为置换气体.
一些气体的密度(常温常压)
气体名称 天然气 空气 氖气 氦气 氩气
密度/(kg·m ) 0.717 4 1.29 0.9 0.134 7 1.784
(3)在灌装 LNG前,空载的LNG运输船需向水舱内注入压载水稳定船身,灌装 LNG的过程中再匀速排出压载水.某次工作中,先往水舱内注入一定量的压载水,此时船身有 的体积露出水面.再开始向运输船灌装LNG,当灌装了7.2万吨LNG后,运输船达到满载状态,此时船身有 的体积露出水面,水舱内压载水的体积为灌装前的 .此次灌装LNG 的过程用时160 h,这个过程中水舱每小时排出多少m 的压载水
解:(1)1 cm 殷瓦钢的体积:
1 cm 殷瓦钢的质量:开始后每一直腹瓦钢 Vexk的=8×10 kg/m ×7×10 m =5.6×10 kg,
钢材吸收的最大热量:Q吸=C极瓦锅 n最无限△t=0.5×10 J/(kg·℃)×5.6×10 kg×(1425℃-25℃)=392J,由题意知,不考虑焊接时的热量损失,则
则每次焊接的最大时间:
(3)由题意知,灌装了7.2万吨LNG后,运输船达到“满载状态”,此时运输船排开水的质量: 10 kg,运输船排开水的体积:
灌装的LNG 受到的重力: 由阿基米德原理可得,运输船满载时受到的浮力:
由于运输船处于漂浮状态,则其受到的浮力等于船和灌装的LNG以及压载水受到的总重力,即
灌装LNG 前,运输船往水舱内注入一定量的压载水,此时船身有 的体积露出水面,则此时运输船排开水的体积
此时运输船受到的浮力 由于运输船处于漂浮状态,则其受到的浮力等于船和压载水受到的总重力,即 由题意知,运输船达到满载状态,水舱内压载水的体积为灌装前的
由G= mg=ρgVi可得
由①②解得
则水舱排出水的重力:
排出水的质量:
排出水的体积:
则整个灌装过程,水舱每小时排出水的体积:
8.(2024武昌)随着我国城镇化建设的快速发展,在城市排污过程中有时会面临着地下管道堵塞现象,需要进行清淤作业,但人工作业难度大、效率低,有时还发生中毒等危险.水下清淤机器人可以很好地解决这一难题.如图甲是我国自主研发的一款水下履带式清淤机器人,可通过计算机控制视频探头对管道内堵塞情况进行探查,应用专业设备对堵塞进行清除.其质量为500 kg,最大功率为5 000 W,清淤时最大行驶速度为1.8km/h.
(1)当该清淤机器人以最大功率,沿平直管道以最快速度匀速前进时,机器人行进时的牵引力是多少
(2)当该机器人在水下作业时,履带对受力面的压强为2 500 Pa,受力面积为1.08 m ,求机器人此时受到的浮力是多少
(3)在某次水下作业时,该机器人的机械臂抓起质量为30kg的石块,如图乙:AO与BO垂直,AO长40cm,BO长30cm,CO长1.2m,CO与水平面夹角为60°,液压杆AB对OC的作用力沿AB方向,石块的重心在C点的正下方.求此时液压杆对机械臂OC的作用力是多少 (不计机械臂所受到的重力和浮力,石块的密度为 g取10 N/ kg)
解: 由 =Fv可得,机器人行进时的牵引力:
(2)履带对受力面的压力:
由于力的作用是相互的,履带受到受力面的支持力
对机器人进行受力分析可知,其受到向上的浮力和支持力和向下的重力,
受到的重力:
则受到的浮力:
(3)石块的重力:Gx=m=g=30kg×10 N/ kg=300N,
石块的体积:
则石块受到的浮力:F
则杠杆C点受到的阻力:
液压杆对机械臂OC的作用力为动力F .在图中分别作出动力、动力臂、阻力和阻力臂,如图所示.
运用数学知识可求得动力臂 阻力臂 根据杠杆平衡条件 则此时液压杆对机械臂OC的作用力
9.(2024江岸)漫步江城,风景正好!景观照明工程让武汉城市面貌焕然一新.在景观照明灯的安装过程中,施工人员常会用到如图甲所示的曲臂登高车进行高空作业.登高车空载时总质量8.5t,工作平台最大荷载460kg,车长8.9m,其简化图如图乙所示.该车机械臂(含工作平台)总质量2t,分为主臂和副臂,两臂均可在液压装置作用下转动,主臂MO长6m,副臂ON 可伸缩且可绕O点自由旋转.(g取10 N/kg)
(1)该车空载沿水平道路匀速直线行驶10 km,若行驶过程中所受阻力为重力的0.06倍,则这一过程中牵引力所做的功为多少焦
(2)该车4个相同的车轮与地面接触良好,以最大荷载在水平地面上作业时,为控制车辆对地面的压强不超过 则每个车轮与地面接触面积不小于多少平方米
(3)如图乙所示,某次施工时,要将质量为100kg的照明组件送至位置1处,液压杆先将主臂MO顶至与水平方向成60°角,再将副臂ON伸长至位置1处,此时机械臂和照明组件重心在 A 点,液压杆对主臂的作用力为( .卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动120°至位置2处,此时机械臂重心在B点,OA=4m,OB=2m,求卸下照明组件前后,液压杆对主臂作用力的变化量△F 是多少
解:(1)由题意知,登高车空载时总质量8.5t,行驶过程中所受阻力为重力的0.06倍,该车空载沿水平道路匀速行驶过程中处于平衡状态,则牵引力等于阻力,则 F=∫=0.06G=0.06mg=0.06
牵引力所做的功:
(2)以最大荷载在水平地面上作业时,车对地面的压力: +460kg×10 N/ kg=8.96×10 N,
为控制车辆对地面的压强不超过7×10 Pa,则每个车轮与地面接触面积不小于:
(3)机械臂与照明组件所受的重力:G =2×10 kg×10 N/ kg+100kg×10 N/ kg=2.1×10 N,AM-AO+OM=4m+6m=10m,
由数学知识可知,阻力臂:
则根据杠杆平衡的条件可知
解得
卸下照明组件后,主臂位置不变,副臂回缩并绕O点转动120°至位置2处,此时机械臂重心在B点,机械臂所受重力:
由数学知识可知,阻力臂:
则根据杠杆平衡的条件可知
则动力:
因此卸下照明组件前后,液压杆对主臂作用力的变化量:
同课章节目录