2024-2025学年物理人教版八年级下册 12.1 课时1 杠杆及其平衡条件(18页)课件
文档属性
| 名称 | 2024-2025学年物理人教版八年级下册 12.1 课时1 杠杆及其平衡条件(18页)课件 |
|
|
| 格式 | pptx | ||
| 文件大小 | 7.2MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-04-18 00:00:00 | ||
图片预览
文档简介
(共18张PPT)
12.1 课时1 杠杆及其平衡条件
第十二章 简单机械
1.认识杠杆,并能准确找出支点、动力、阻力、动力臂、阻力臂。
2.通过实验,探究杠杆的平衡条件。
3.利用 F1l1=F2l2 进行相关计算。
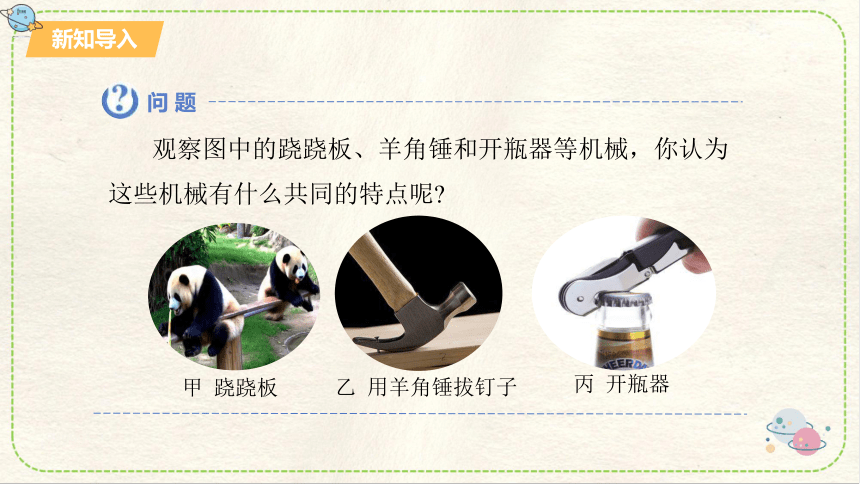
观察图中的跷跷板、羊角锤和开瓶器等机械,你认为这些机械有什么共同的特点呢
问 题
甲 跷跷板
乙 用羊角锤拔钉子
丙 开瓶器
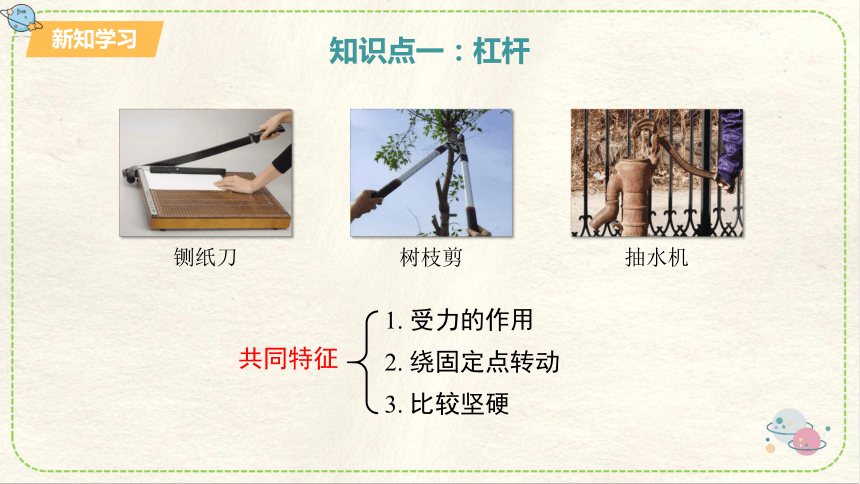
铡纸刀
树枝剪
抽水机
知识点一:杠杆
1. 受力的作用
2. 绕固定点转动
3. 比较坚硬
共同特征
1.定义:在力的作用下能绕着固定点转动的硬棒就称为杠杆。
注意:
(1)“硬棒” 是指在力的作用不发生形变。
(2)杠杆可以是直的,也可以是弯曲的。
O
l1
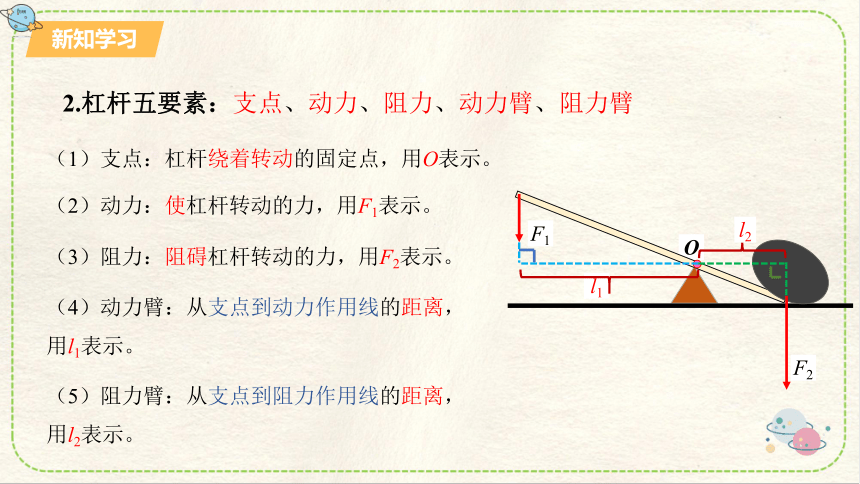
2.杠杆五要素:支点、动力、阻力、动力臂、阻力臂
(1)支点:杠杆绕着转动的固定点,用O表示。
(2)动力:使杠杆转动的力,用F1表示。
(3)阻力:阻碍杠杆转动的力,用F2表示。
(4)动力臂:从支点到动力作用线的距离,用l1表示。
(5)阻力臂:从支点到阻力作用线的距离,用l2表示。
l2
F1
F2
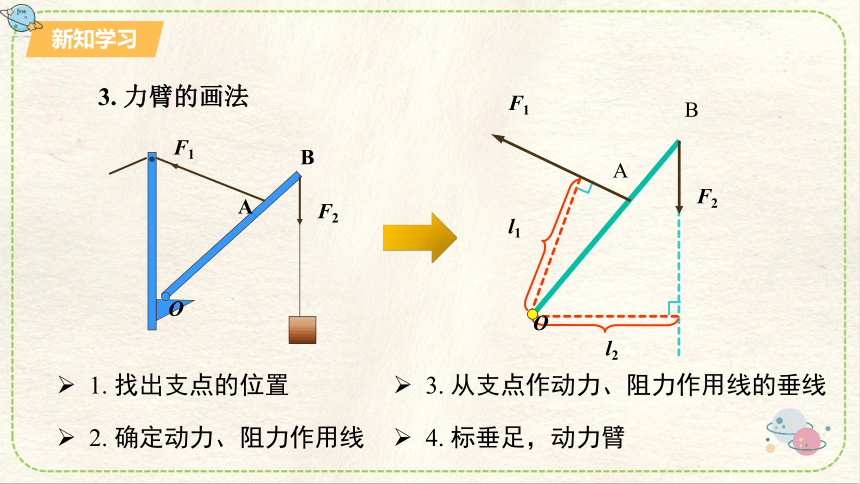
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,动力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。杠杆在满足什么条件时,才会平衡呢?
画出图中杠杆各力的力臂
知识点二:杠杆的平衡条件
杠杆的平衡条件:
当杠杆在动力和阻力的作用下静止时,我们就说此时杠杆处于平衡状态。
【猜想】杠杆在满足什么条件下会保持平衡?
探究杠杆平衡的条件
【实验器材】
带有刻度的杠杆、钩码、弹簧测力计、铁架台。
【实验过程】
1.调节平衡螺母,使杠杆水平平衡。
思考:为什么要调节在水平位置平衡?
保证力臂沿杠杆,便于测量力臂
2.杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
3.改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
4.在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
次数 动力F1 (钩码)/个 阻力F2 (钩码)/个 动力臂l1/格 阻力臂l2/格
1
2
3
4
3
4
4
3
6
4
2
3
4
2
2
4
2
2
2
2
【实验数据记录】
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂
F1l1=F2l2
动物园内,一位物理老师利用一个小小的弹簧测力计,就测出了一头大象的质量(图甲)。测量时用一根长度为12 m的槽钢作为杠杆。如图乙所示,吊钩固定于槽钢的中点0。当槽钢水平静止时,弹簧测力计的示数F1为200N。测得l1为6m,l2为4cm。若不计铁笼的质量请估算大象的质量。g取10 N/kg。
例题
解:如图所示:F1=200N,l1=6m,l2=4cm=0. 04m
O
l1=6m
l2=4cm
F1=200N
F2=?
由杠杆平衡条件 F1L1=F2L2 可得:
F2===3×104 N
大象所受的重力:G2=F2=3×104 N
大象的质量为:
m===3×103 kg = 3t
杠杆及其平衡条件
杠杆
在力的作用下,能绕固定点转动的硬棒,叫做杠杆。
支 点(O)
动 力(F1)
阻 力(F2)
动力臂(l1)
阻力臂(l2)
杠杆的五要素
杠杆的平衡条件
F1l1=F2l2
1.如图所示,OB是以O点为支点的杠杆,F是作用在杠杆B端的力。图中线段AB与力F的作用线在一条直线上,且OA⊥AB、AC⊥OB。线段__________表示力F的力臂。(选填“OA”或“AC”)
OA
l
G
2.作图,图中力 F 作用在杠杆的 A 端,画出它的力臂和石块所受重力的示意图。
3.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂( )个钩码。
A.1
B.2
C.3
D.4
C
12.1 课时1 杠杆及其平衡条件
第十二章 简单机械
1.认识杠杆,并能准确找出支点、动力、阻力、动力臂、阻力臂。
2.通过实验,探究杠杆的平衡条件。
3.利用 F1l1=F2l2 进行相关计算。
观察图中的跷跷板、羊角锤和开瓶器等机械,你认为这些机械有什么共同的特点呢
问 题
甲 跷跷板
乙 用羊角锤拔钉子
丙 开瓶器
铡纸刀
树枝剪
抽水机
知识点一:杠杆
1. 受力的作用
2. 绕固定点转动
3. 比较坚硬
共同特征
1.定义:在力的作用下能绕着固定点转动的硬棒就称为杠杆。
注意:
(1)“硬棒” 是指在力的作用不发生形变。
(2)杠杆可以是直的,也可以是弯曲的。
O
l1
2.杠杆五要素:支点、动力、阻力、动力臂、阻力臂
(1)支点:杠杆绕着转动的固定点,用O表示。
(2)动力:使杠杆转动的力,用F1表示。
(3)阻力:阻碍杠杆转动的力,用F2表示。
(4)动力臂:从支点到动力作用线的距离,用l1表示。
(5)阻力臂:从支点到阻力作用线的距离,用l2表示。
l2
F1
F2
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,动力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。杠杆在满足什么条件时,才会平衡呢?
画出图中杠杆各力的力臂
知识点二:杠杆的平衡条件
杠杆的平衡条件:
当杠杆在动力和阻力的作用下静止时,我们就说此时杠杆处于平衡状态。
【猜想】杠杆在满足什么条件下会保持平衡?
探究杠杆平衡的条件
【实验器材】
带有刻度的杠杆、钩码、弹簧测力计、铁架台。
【实验过程】
1.调节平衡螺母,使杠杆水平平衡。
思考:为什么要调节在水平位置平衡?
保证力臂沿杠杆,便于测量力臂
2.杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆水平平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
3.改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,再做几次实验。
4.在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录表格中。
次数 动力F1 (钩码)/个 阻力F2 (钩码)/个 动力臂l1/格 阻力臂l2/格
1
2
3
4
3
4
4
3
6
4
2
3
4
2
2
4
2
2
2
2
【实验数据记录】
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂
F1l1=F2l2
动物园内,一位物理老师利用一个小小的弹簧测力计,就测出了一头大象的质量(图甲)。测量时用一根长度为12 m的槽钢作为杠杆。如图乙所示,吊钩固定于槽钢的中点0。当槽钢水平静止时,弹簧测力计的示数F1为200N。测得l1为6m,l2为4cm。若不计铁笼的质量请估算大象的质量。g取10 N/kg。
例题
解:如图所示:F1=200N,l1=6m,l2=4cm=0. 04m
O
l1=6m
l2=4cm
F1=200N
F2=?
由杠杆平衡条件 F1L1=F2L2 可得:
F2===3×104 N
大象所受的重力:G2=F2=3×104 N
大象的质量为:
m===3×103 kg = 3t
杠杆及其平衡条件
杠杆
在力的作用下,能绕固定点转动的硬棒,叫做杠杆。
支 点(O)
动 力(F1)
阻 力(F2)
动力臂(l1)
阻力臂(l2)
杠杆的五要素
杠杆的平衡条件
F1l1=F2l2
1.如图所示,OB是以O点为支点的杠杆,F是作用在杠杆B端的力。图中线段AB与力F的作用线在一条直线上,且OA⊥AB、AC⊥OB。线段__________表示力F的力臂。(选填“OA”或“AC”)
OA
l
G
2.作图,图中力 F 作用在杠杆的 A 端,画出它的力臂和石块所受重力的示意图。
3.现有若干个规格相同的钩码,如图所示,为了使杠杆在水平位置平衡,应在杠杆的A点挂( )个钩码。
A.1
B.2
C.3
D.4
C