人教版中考物理复习第十二章简单机械第一课时杠杆和滑轮课件(55页ppt)
文档属性
| 名称 | 人教版中考物理复习第十二章简单机械第一课时杠杆和滑轮课件(55页ppt) |
|
|
| 格式 | ppt | ||
| 文件大小 | 2.0MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-05-26 00:00:00 | ||
图片预览
文档简介
(共55张PPT)
教材梳理
第十二章 简 单 机 械
第一课时 杠杆和滑轮
1. 知道简单机械。探究并了解杠杆的平衡条件。
2. 知道滑轮及其特点,知道使用滑轮时拉力与物重的关系,会组装简单的滑轮组。
3. 探究杠杆的平衡条件。(必做实验)
课程标准
考点梳理
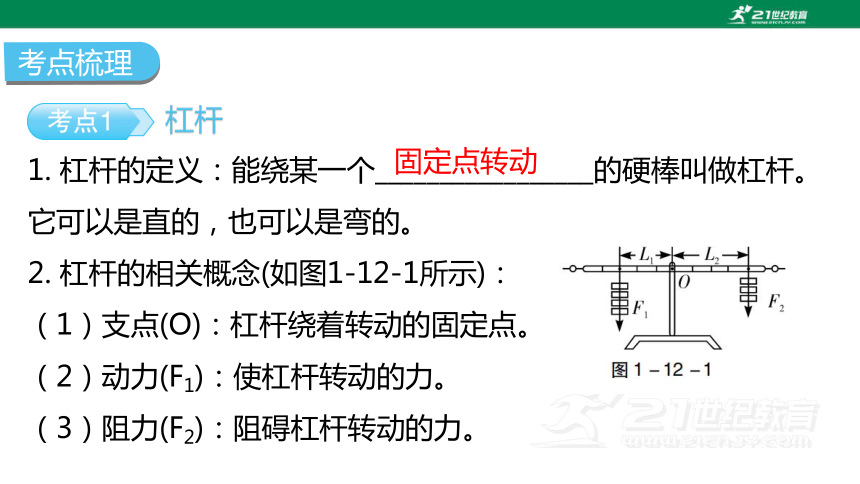
1. 杠杆的定义:能绕某一个_________________的硬棒叫做杠杆。它可以是直的,也可以是弯的。
2. 杠杆的相关概念(如图1-12-1所示):
(1)支点(O):杠杆绕着转动的固定点。
(2)动力(F1):使杠杆转动的力。
(3)阻力(F2):阻碍杠杆转动的力。
固定点转动
杠杆
(4)动力臂(L1):从__________到______________的距离。
(5)阻力臂(L2):从__________到______________的距离。
3. 力臂作图分为三步:
(1)找到支点。
(2)过__________作___________________的垂线并标出垂直符号。
(3)用大括号或双箭头标出力臂L。
支点
动力作用线
支点
阻力作用线
支点
力的作用线
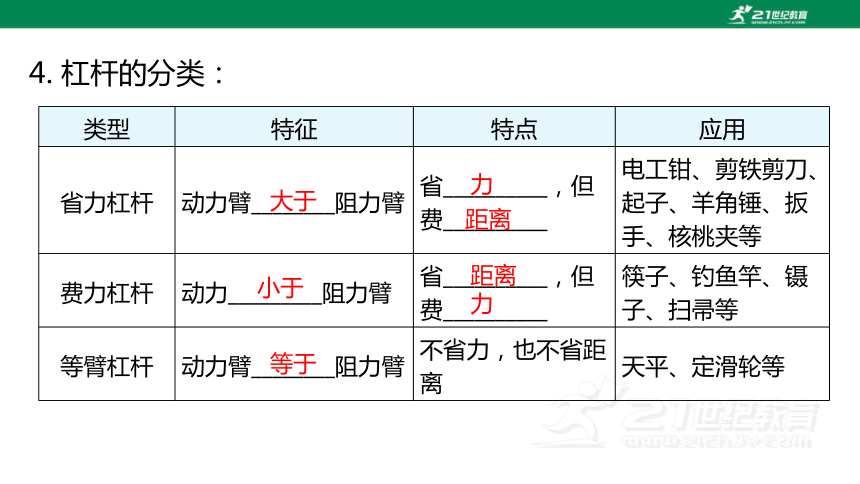
4. 杠杆的分类:
类型 特征 特点 应用
省力杠杆 动力臂________阻力臂 省__________,但费__________ 电工钳、剪铁剪刀、起子、羊角锤、扳手、核桃夹等
费力杠杆 动力_________阻力臂 省__________,但费__________ 筷子、钓鱼竿、镊子、扫帚等
等臂杠杆 动力臂________阻力臂 不省力,也不省距离 天平、定滑轮等
大于
力
距离
小于
距离
力
等于
注意:(1)动力和阻力的作用点和支点一样,都在杠杆上。(2)“力臂”相当于数学中的“点到直线的距离”,这里的点就是支点,这里的直线就是动力作用线或者阻力作用线(有时需用虚线将力的作用线延长)。
杠杆的平衡条件
1. 杠杆的平衡条件:动力×动力臂=阻力×阻力臂,即______________________。
2. 找最小动力的方法:根据杠杆平衡条件F1L1=F2L2可知,阻力和阻力臂一定时,当力垂直于支点与动力作用点的连线时,动力臂最长,动力最小。
拓展:画出最小动力的方法:用虚线连接支点和动力作用点(杠杆上距离支点最远处),这两个点之间的距离为最长力臂,然后在动力作用点画出垂直于这个力臂的力(根据动力和阻力使杠杆转动的方向相反,确定动力的方向),即为最小动力。
F1L1=F2L2
滑轮
1. 定滑轮:轮轴不随物体运动的滑轮。
(1)定滑轮可以看作是一个__________杠杆。
(2)使用定滑轮不省力,也不省距离,但_______________拉力的方向。
2. 动滑轮:轮轴随物体运动而运动的滑轮。使用动滑轮可以__________力,但__________拉力的方向,而且__________距离。
等臂
可以改变
省
不改变
费
3. 滑轮组:由动滑轮和定滑轮组成的简单机械。使用滑轮组,可以省力,也可以改变拉力的方向。
4. 使用滑轮组时,滑轮组的省力情况由承担动滑轮和物重的绳子股数n决定,而拉力F大小与物重G物、动滑轮重G动、绳重、摩擦等有关。
(1)若不计绳重和摩擦,F=__________________。
(2)若不计滑轮重、绳重和摩擦,F=____________。
拓展:(1)使用滑轮时,重物上升的高度用h表示,绳子自由端移动的距离用s表示。则在定滑轮中,s=h;在动滑轮中,
s=2h;在滑轮组中,s=nh。
(2)使用滑轮时,重物上升的速度用vG表示,绳子自由端移动的速度用vF表示。则在定滑轮中,vF=vG;在动滑轮中,
vF=2vG;在滑轮组中,vF=nvG。
课本简练
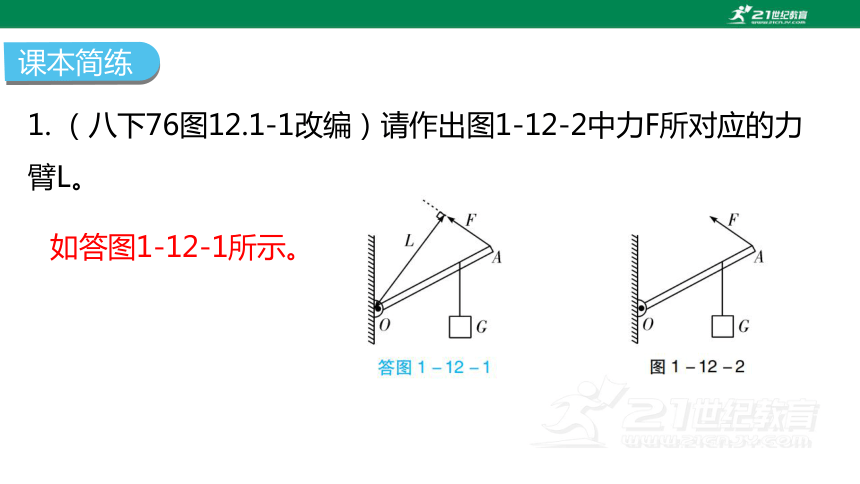
1. (八下76图12.1-1改编)请作出图1-12-2中力F所对应的力臂L。
如答图1-12-1所示。
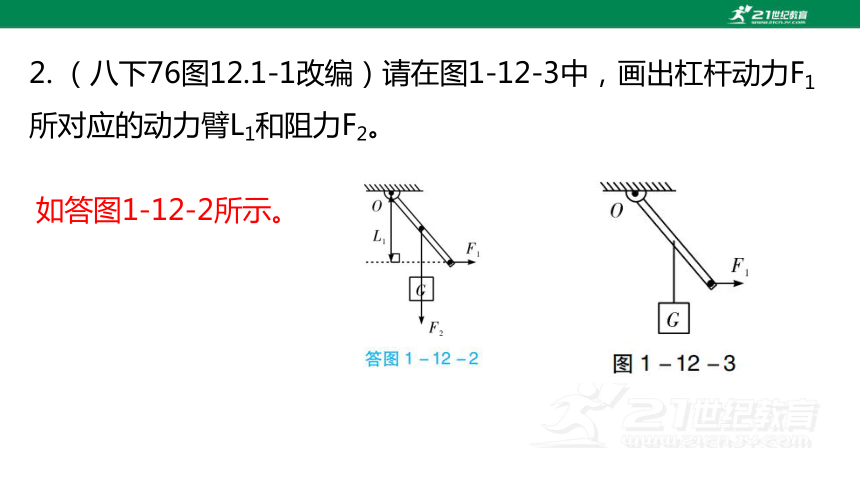
2. (八下76图12.1-1改编)请在图1-12-3中,画出杠杆动力F1所对应的动力臂L1和阻力F2。
如答图1-12-2所示。
3. (八下P78例题改编)如图1-12-4所示,轻质杠杆OB可绕O点转动,其中OA=AB=20 cm。在杠杆的B端挂一个重为40 N的物体,在A点施加竖直向上的拉力F1,能使图中的杠杆处于静止状态,则拉力F1的大小为多少牛?
4. (八下P82实验改编)两个滑轮组合后匀速提升重为20 N的物体,如图1-12-5所示。其中A是________滑轮;若不计摩擦和滑轮重,F的大小为__________N;要使重物上升1 m,绳子自由端应拉下__________m。
定
10
2
5. (八下P84动手动脑物理4改编)请在图1-12-6中画出滑轮组的绳子的绕法。
如答图1-12-3所示。
易错精讲
【例1】杠杆AB可绕O点转动,受力情况如图1-12-7所示。请在图中作出杠杆受到的阻力F′及力臂L,并画出作用在B点的最小作用力F。
易错点1
力臂作图
如答图1-12-4所示。
思路点拨:(1)画力时,注意动力和阻力的作用点均在杠杆上。(2)画力臂时,注意力臂是支点O到力的作用线的距离,它不一定在杠杆上。
【变式1】如图1-12-8所示,杠杆处于静止状态,L1是力F1的力臂,请在图中画出动力F1,并画出F2的力臂。
如答图1-12-5所示。
【例2】【模型建构】图1-12-9甲是某斜拉索桥的实景图,可逐步抽象成如图1-12-9乙、丙所示的模型,为了减小钢索承受的拉力,在可能的前提下,下列做法可行的是( )
A. 增加桥塔高度
B. 降低桥塔高度
C. 选用更粗的钢索
D. 增加桥面厚度
易错点2
杠杆平衡条件的应用
A
【变式2】【传统文化】龙舟比赛是中国传统运动项目之一。图1-12-10是某运动员手中划动的船桨示意图,其中一只手握住O点处,另一只手对船桨A处施加力。船桨可看作一个__________杠杆,若想使水对龙舟产生更大的推力,A点可适当__________(填“远离”或“靠近”)O点。
费力
远离
易错点3
滑轮组的作用力分析
C
【例3】如图1-12-11所示,三种方式分别拉动同一物体沿相同水平地面匀速运动,拉力分别为F1、F2、F3,不计滑轮与轴之间的摩擦,比较它们的大小,则( )
A. F1<F2<F3 B. F1>F2=F3
C. F2>F1>F3 D. F1=F2>F3
【变式3】图1-12-12中加在绳子自由端与滑轮所提重物的重力G之间的关系:(不计滑轮与绳子的重力及摩擦)
(1)F1=__________G。
(2)F2=__________G。
(3)F3=_________G。
(4)F4=_________G。
1
实验 探究杠杆的平衡条件(10年1考:2022年)
重点实验
实验名称 探究杠杆的平衡条件
实验器材 弹簧测力计、钩码、杠杆等
考点归纳 (1)杠杆的平衡状态:杠杆静止或匀速转动
(2)使杠杆在水平位置平衡的目的:使力臂
落在杠杆上,便于读出力臂
考点归纳 (3)实验前通过“左沉旋右”的方法调节杠杆任意一端的平衡螺母,使杠杆保持水平并静止
(4)实验过程中不能调节平衡螺母
(5)用弹簧测力计代替钩码进行探究,
当拉力方向由竖直改为倾斜,要使杠杆仍
在水平位置平衡,则弹簧测力计的示数变大,因为阻力和阻力臂不变时,拉力的力臂(动力臂)变小_了
(6)多次实验的目的:一次实验的数据具有偶然性,多次实验能使结论具有普遍性
实验结论 动力×动力臂=阻力×阻力臂
【例】【科学探究】如图1-12-13所示,小宇利用杠杆(杠杆上的每小格距离都相等)、6个相同的钩码、弹簧测力计探究杠杆的平衡条件。
【实验器材】
(1)如图甲所示,把质量分布均匀的杠杆中点O作为__________,其目的是消除杠杆自重对实验的影响。调节A、B两端的平衡螺母使杠杆在水平位置平衡,目的是便于______________。
(2)实验中可以用弹簧测力计代替钩码进行探究,其中一个好处是可以改变力的__________。
支点
测量力臂
方向
【实验操作】
(3)实验前,杠杆静止在如图乙所示的位置,此时杠杆处于__________(填“平衡”或“非平衡”)状态。接下来应将平衡螺母向__________(填“左”或“右”)调节,使杠杆在水平位置平衡。
平衡
右
(4)实验中,在支点的左边,离支点2格的P处挂有3个钩码,如图丙所示,为使杠杆恢复水平平衡,请在支点的右边挂上钩码(用两种方法),你的方法是①在位置2处挂__________个钩码;②在位置________处挂________个钩码。
3
3
2
【实验结论】
(5)实验中测得的数据如下表所示,根据表格中的数据,可初步得出杠杆的平衡条件是_________________________________。由此推断,表格中漏填的数据为________N。
动力×动力臂=阻力×阻力臂
1
测量序号 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 1 20 2 10
2 2 15 1.5 20
3 3 5 15
【实验拓展】
(6)若用弹簧测力计进行实验,如图丁所示,则此时弹簧测力计的示数是________N;将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,此时拉力的力臂将________,弹簧测力计的示数将______。(后两空均填“变大”“变小”或“不变”)
1.8
变小
变大
考点1 杠杆[10年6考:2015年(作图)、2017年(作图)、2018年(作图和计算)、2019年(作图)、2020年(作图)、2021年(计算)考查]
考点精练
1. 【物理学与日常生活】(2024广东)图1-12-14为某款剪刀的示意图。握住手柄修剪树枝时,剪刀可视为杠杆,该杠杆的特点是( )
A. 省力
B. 费力
C. 省功
D. 省距离
A
2. 【模型建构】(2019广东)如图1-12-15所示,拉杆式行李箱在拉力F的作用下静止在斜坡上,请画出行李箱受到的重力G以及拉力F到O点的力臂L。
如答图1-12-6所示。
3. 【模型建构】(2024广元)图1-12-16甲是压制饺子皮的“神器”。压皮时压杆可视为一个杠杆,图1-12-16乙是其简化示意图,O为支点,F2为压饺子皮时作用在B点的阻力。请在图乙中画出压饺子皮时作用在A点的最小动力F1及阻力F2的力臂L2。
如答图1-12-7所示。
考点2 杠杆的平衡条件[10年3考:2016年(填空)、2022年(实验)、2023年(实验和综合)考查]
4. 【物理学与日常生活】(2023济南)图1-12-17甲所示的
案秤是生活中测量质量的常用工具,与3个各标有“0.5 kg”
“1 kg”“5 kg”和2个标有“2 kg”的增砣配套使用。如果把如图1-12-17乙所示的标有“2 kg”的增砣放在秤盘中称量它的质量,测量结果应该( )
A. 大于2 kg B. 等于2 kg
C. 小于2 kg D. 无法判断
C
5. 【科学思维】(2024镇江)小明用如图1-12-18所示装置探究杠杆的平衡条件,实验中杠杆始终保持水平平衡,此时弹簧测力计处于竖直方向,他发现弹簧测力计的示数稍稍超过其最大测量值。为了完成实验,下列方案可行的是( )
A. 适当增加钩码的数量
B. 适当向左移动钩码的位置
C. 将弹簧测力计转到图中虚线位置
D. 适当向左移动弹簧测力计的位置
D
6. (2016广东)如图1-12-19所示,由不同物质制成的甲和乙两种实心球的体积相等,此时杠杆平衡(杠杆自重、挂盘和细线的质量忽略不计)。则杠杆左右两边的力臂之比为__________,1个甲球和1个乙球的质量之比为__________,甲球和乙球的密度之比为__________。
2∶1
1∶3
1∶3
7. 【物理学与工程实践】(2021广东)杆秤是从我国古代沿用至今的称量工具。图1-12-20是小明制作的杆秤的示意图,使用时,将待称物体挂在秤钩上,用手提起B或C处(相当于支点)的秤纽,移动秤砣在秤杆上的位置D,使秤杆达到水平平衡的状态时可读出待称物体的质量,此秤最大
称量是10 kg,秤砣最远可移至E点。
秤杆和秤钩的质量忽略不计,AB、
BC、BE的长度如图所示。问:
(g取10 N/kg)
(1)提起哪处的秤纽,此秤的称量最大?
(2)秤砣的质量为多少?
(3)当提起C处秤纽称一袋质量为2 kg的荔枝时,D与C之间的距离为多少?
考点3 滑轮[10年6考:2015年(填空)、2016年(作图)、2018年(填空和作图)、2019年(计算)、2021年(填空)、2022年(选择)考查]
8. (2022广东)分别使用下列四种装置匀速提升同一重物,不计滑轮重、绳重和摩擦,最省力的是( )
A
9. (2020广东节选)如图1-12-21所示,人向下拉绳提升重物。已知物体重为400 N,动滑轮重为60 N,不计绳重及摩擦,将重物匀速提升0.5 m,人需用的拉力为_________N,绳子自由端移动的距离为__________m。
230
1
10. 请画出图1-12-22中滑轮组最省力且站在地面向下拉绳的绕法。
如答图1-12-8所示。
考点4 综合真题
11. 【科学思维】(2018广东)a、b两种实心物体的质量与体积的关系如图1-12-23甲所示,把体积相等的a、b物体挂在滑轮组下,若要使它们均处于静止状态,则图1-12-23乙的虚线框内悬挂b物体的个数是(不计绳重、滑轮重和摩擦)( )
A. 1 个 B. 2 个
C. 3 个 D. 4 个
B
12. (2021广东节选)用图1-12-24甲的滑轮组提升重为200 N的物体,已知拉力F为80 N,不计绳重和摩擦,物体和绳子自由端的运动情况如图1-12-24乙所示,反映绳子自由端运动的图线是__________(填“A”或“B”),动滑轮重为__________N。
A
40
13. 【科学探究】(2022广东)在“探究杠杆的平衡条件”实验中:
(1)小明安装好杠杆后,发现其左端下沉,如图1-12-25甲所示,为使杠杆在水平位置平衡,应将平衡螺母向__________调节。
右
(2)如图1-12-25乙所示,调节杠杆水平平衡后,在A处悬挂
3个钩码,每个钩码重为0.5 N。如果在B处施加一个拉力使杠杆在水平位置再次平衡,当方向为______________时,拉力最小,大小为__________N。
竖直向下
2
(3)课后,小明制作了一个简易杠杆,调节杠杆在水平位置平衡,然后在它两边恰当位置分别放上不同数量的同种硬币,使其在水平位置再次平衡,如图1-12-25丙所示,则力臂l1∶l2=__________,若两边同时各取走一枚硬币,则杠杆的_________端将下沉。
2∶1
右
14. 【物理学与工程实践】(2023广东)明代宋应星在《天工开物》中记载的农业生产汲水装置——辘轳,沿用至今。图1-12-26甲是一种辘轳,由具有共同转动轴的大轮和小轮组成。提水时,用力使大轮转动,小轮随之转动并缠绕井绳,提起水桶。
(1)图甲中的辘轳可视为不等臂杠杆,为方便提水,它是按照__________(填“省力”或“费力”)杠杆来设计的。某个时刻用辘轳提水的示意图如图1-12-26乙所示,它的支点是“A”“B”或“C”中的__________点。
省力
B
(2)设大轮与小轮的半径之比为3∶1,水桶受到的总重力为
90 N。使周长为3 m的大轮转动一圈,水桶匀速上升,井绳对水桶做功_______J;若要使辘轳静止在如图乙所示的位置,作用在C点处最小的力应为________N。(不计井绳的粗细和自重)
90
30
(3)如图1-12-26丙所示,水龙头开关的设计也应用了同样的原理,为了更省力,开关应选用________(填“①”或“②”)。
①
教材梳理
第十二章 简 单 机 械
第一课时 杠杆和滑轮
1. 知道简单机械。探究并了解杠杆的平衡条件。
2. 知道滑轮及其特点,知道使用滑轮时拉力与物重的关系,会组装简单的滑轮组。
3. 探究杠杆的平衡条件。(必做实验)
课程标准
考点梳理
1. 杠杆的定义:能绕某一个_________________的硬棒叫做杠杆。它可以是直的,也可以是弯的。
2. 杠杆的相关概念(如图1-12-1所示):
(1)支点(O):杠杆绕着转动的固定点。
(2)动力(F1):使杠杆转动的力。
(3)阻力(F2):阻碍杠杆转动的力。
固定点转动
杠杆
(4)动力臂(L1):从__________到______________的距离。
(5)阻力臂(L2):从__________到______________的距离。
3. 力臂作图分为三步:
(1)找到支点。
(2)过__________作___________________的垂线并标出垂直符号。
(3)用大括号或双箭头标出力臂L。
支点
动力作用线
支点
阻力作用线
支点
力的作用线
4. 杠杆的分类:
类型 特征 特点 应用
省力杠杆 动力臂________阻力臂 省__________,但费__________ 电工钳、剪铁剪刀、起子、羊角锤、扳手、核桃夹等
费力杠杆 动力_________阻力臂 省__________,但费__________ 筷子、钓鱼竿、镊子、扫帚等
等臂杠杆 动力臂________阻力臂 不省力,也不省距离 天平、定滑轮等
大于
力
距离
小于
距离
力
等于
注意:(1)动力和阻力的作用点和支点一样,都在杠杆上。(2)“力臂”相当于数学中的“点到直线的距离”,这里的点就是支点,这里的直线就是动力作用线或者阻力作用线(有时需用虚线将力的作用线延长)。
杠杆的平衡条件
1. 杠杆的平衡条件:动力×动力臂=阻力×阻力臂,即______________________。
2. 找最小动力的方法:根据杠杆平衡条件F1L1=F2L2可知,阻力和阻力臂一定时,当力垂直于支点与动力作用点的连线时,动力臂最长,动力最小。
拓展:画出最小动力的方法:用虚线连接支点和动力作用点(杠杆上距离支点最远处),这两个点之间的距离为最长力臂,然后在动力作用点画出垂直于这个力臂的力(根据动力和阻力使杠杆转动的方向相反,确定动力的方向),即为最小动力。
F1L1=F2L2
滑轮
1. 定滑轮:轮轴不随物体运动的滑轮。
(1)定滑轮可以看作是一个__________杠杆。
(2)使用定滑轮不省力,也不省距离,但_______________拉力的方向。
2. 动滑轮:轮轴随物体运动而运动的滑轮。使用动滑轮可以__________力,但__________拉力的方向,而且__________距离。
等臂
可以改变
省
不改变
费
3. 滑轮组:由动滑轮和定滑轮组成的简单机械。使用滑轮组,可以省力,也可以改变拉力的方向。
4. 使用滑轮组时,滑轮组的省力情况由承担动滑轮和物重的绳子股数n决定,而拉力F大小与物重G物、动滑轮重G动、绳重、摩擦等有关。
(1)若不计绳重和摩擦,F=__________________。
(2)若不计滑轮重、绳重和摩擦,F=____________。
拓展:(1)使用滑轮时,重物上升的高度用h表示,绳子自由端移动的距离用s表示。则在定滑轮中,s=h;在动滑轮中,
s=2h;在滑轮组中,s=nh。
(2)使用滑轮时,重物上升的速度用vG表示,绳子自由端移动的速度用vF表示。则在定滑轮中,vF=vG;在动滑轮中,
vF=2vG;在滑轮组中,vF=nvG。
课本简练
1. (八下76图12.1-1改编)请作出图1-12-2中力F所对应的力臂L。
如答图1-12-1所示。
2. (八下76图12.1-1改编)请在图1-12-3中,画出杠杆动力F1所对应的动力臂L1和阻力F2。
如答图1-12-2所示。
3. (八下P78例题改编)如图1-12-4所示,轻质杠杆OB可绕O点转动,其中OA=AB=20 cm。在杠杆的B端挂一个重为40 N的物体,在A点施加竖直向上的拉力F1,能使图中的杠杆处于静止状态,则拉力F1的大小为多少牛?
4. (八下P82实验改编)两个滑轮组合后匀速提升重为20 N的物体,如图1-12-5所示。其中A是________滑轮;若不计摩擦和滑轮重,F的大小为__________N;要使重物上升1 m,绳子自由端应拉下__________m。
定
10
2
5. (八下P84动手动脑物理4改编)请在图1-12-6中画出滑轮组的绳子的绕法。
如答图1-12-3所示。
易错精讲
【例1】杠杆AB可绕O点转动,受力情况如图1-12-7所示。请在图中作出杠杆受到的阻力F′及力臂L,并画出作用在B点的最小作用力F。
易错点1
力臂作图
如答图1-12-4所示。
思路点拨:(1)画力时,注意动力和阻力的作用点均在杠杆上。(2)画力臂时,注意力臂是支点O到力的作用线的距离,它不一定在杠杆上。
【变式1】如图1-12-8所示,杠杆处于静止状态,L1是力F1的力臂,请在图中画出动力F1,并画出F2的力臂。
如答图1-12-5所示。
【例2】【模型建构】图1-12-9甲是某斜拉索桥的实景图,可逐步抽象成如图1-12-9乙、丙所示的模型,为了减小钢索承受的拉力,在可能的前提下,下列做法可行的是( )
A. 增加桥塔高度
B. 降低桥塔高度
C. 选用更粗的钢索
D. 增加桥面厚度
易错点2
杠杆平衡条件的应用
A
【变式2】【传统文化】龙舟比赛是中国传统运动项目之一。图1-12-10是某运动员手中划动的船桨示意图,其中一只手握住O点处,另一只手对船桨A处施加力。船桨可看作一个__________杠杆,若想使水对龙舟产生更大的推力,A点可适当__________(填“远离”或“靠近”)O点。
费力
远离
易错点3
滑轮组的作用力分析
C
【例3】如图1-12-11所示,三种方式分别拉动同一物体沿相同水平地面匀速运动,拉力分别为F1、F2、F3,不计滑轮与轴之间的摩擦,比较它们的大小,则( )
A. F1<F2<F3 B. F1>F2=F3
C. F2>F1>F3 D. F1=F2>F3
【变式3】图1-12-12中加在绳子自由端与滑轮所提重物的重力G之间的关系:(不计滑轮与绳子的重力及摩擦)
(1)F1=__________G。
(2)F2=__________G。
(3)F3=_________G。
(4)F4=_________G。
1
实验 探究杠杆的平衡条件(10年1考:2022年)
重点实验
实验名称 探究杠杆的平衡条件
实验器材 弹簧测力计、钩码、杠杆等
考点归纳 (1)杠杆的平衡状态:杠杆静止或匀速转动
(2)使杠杆在水平位置平衡的目的:使力臂
落在杠杆上,便于读出力臂
考点归纳 (3)实验前通过“左沉旋右”的方法调节杠杆任意一端的平衡螺母,使杠杆保持水平并静止
(4)实验过程中不能调节平衡螺母
(5)用弹簧测力计代替钩码进行探究,
当拉力方向由竖直改为倾斜,要使杠杆仍
在水平位置平衡,则弹簧测力计的示数变大,因为阻力和阻力臂不变时,拉力的力臂(动力臂)变小_了
(6)多次实验的目的:一次实验的数据具有偶然性,多次实验能使结论具有普遍性
实验结论 动力×动力臂=阻力×阻力臂
【例】【科学探究】如图1-12-13所示,小宇利用杠杆(杠杆上的每小格距离都相等)、6个相同的钩码、弹簧测力计探究杠杆的平衡条件。
【实验器材】
(1)如图甲所示,把质量分布均匀的杠杆中点O作为__________,其目的是消除杠杆自重对实验的影响。调节A、B两端的平衡螺母使杠杆在水平位置平衡,目的是便于______________。
(2)实验中可以用弹簧测力计代替钩码进行探究,其中一个好处是可以改变力的__________。
支点
测量力臂
方向
【实验操作】
(3)实验前,杠杆静止在如图乙所示的位置,此时杠杆处于__________(填“平衡”或“非平衡”)状态。接下来应将平衡螺母向__________(填“左”或“右”)调节,使杠杆在水平位置平衡。
平衡
右
(4)实验中,在支点的左边,离支点2格的P处挂有3个钩码,如图丙所示,为使杠杆恢复水平平衡,请在支点的右边挂上钩码(用两种方法),你的方法是①在位置2处挂__________个钩码;②在位置________处挂________个钩码。
3
3
2
【实验结论】
(5)实验中测得的数据如下表所示,根据表格中的数据,可初步得出杠杆的平衡条件是_________________________________。由此推断,表格中漏填的数据为________N。
动力×动力臂=阻力×阻力臂
1
测量序号 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm
1 1 20 2 10
2 2 15 1.5 20
3 3 5 15
【实验拓展】
(6)若用弹簧测力计进行实验,如图丁所示,则此时弹簧测力计的示数是________N;将弹簧测力计沿虚线方向拉,仍然使杠杆在原来的位置平衡,此时拉力的力臂将________,弹簧测力计的示数将______。(后两空均填“变大”“变小”或“不变”)
1.8
变小
变大
考点1 杠杆[10年6考:2015年(作图)、2017年(作图)、2018年(作图和计算)、2019年(作图)、2020年(作图)、2021年(计算)考查]
考点精练
1. 【物理学与日常生活】(2024广东)图1-12-14为某款剪刀的示意图。握住手柄修剪树枝时,剪刀可视为杠杆,该杠杆的特点是( )
A. 省力
B. 费力
C. 省功
D. 省距离
A
2. 【模型建构】(2019广东)如图1-12-15所示,拉杆式行李箱在拉力F的作用下静止在斜坡上,请画出行李箱受到的重力G以及拉力F到O点的力臂L。
如答图1-12-6所示。
3. 【模型建构】(2024广元)图1-12-16甲是压制饺子皮的“神器”。压皮时压杆可视为一个杠杆,图1-12-16乙是其简化示意图,O为支点,F2为压饺子皮时作用在B点的阻力。请在图乙中画出压饺子皮时作用在A点的最小动力F1及阻力F2的力臂L2。
如答图1-12-7所示。
考点2 杠杆的平衡条件[10年3考:2016年(填空)、2022年(实验)、2023年(实验和综合)考查]
4. 【物理学与日常生活】(2023济南)图1-12-17甲所示的
案秤是生活中测量质量的常用工具,与3个各标有“0.5 kg”
“1 kg”“5 kg”和2个标有“2 kg”的增砣配套使用。如果把如图1-12-17乙所示的标有“2 kg”的增砣放在秤盘中称量它的质量,测量结果应该( )
A. 大于2 kg B. 等于2 kg
C. 小于2 kg D. 无法判断
C
5. 【科学思维】(2024镇江)小明用如图1-12-18所示装置探究杠杆的平衡条件,实验中杠杆始终保持水平平衡,此时弹簧测力计处于竖直方向,他发现弹簧测力计的示数稍稍超过其最大测量值。为了完成实验,下列方案可行的是( )
A. 适当增加钩码的数量
B. 适当向左移动钩码的位置
C. 将弹簧测力计转到图中虚线位置
D. 适当向左移动弹簧测力计的位置
D
6. (2016广东)如图1-12-19所示,由不同物质制成的甲和乙两种实心球的体积相等,此时杠杆平衡(杠杆自重、挂盘和细线的质量忽略不计)。则杠杆左右两边的力臂之比为__________,1个甲球和1个乙球的质量之比为__________,甲球和乙球的密度之比为__________。
2∶1
1∶3
1∶3
7. 【物理学与工程实践】(2021广东)杆秤是从我国古代沿用至今的称量工具。图1-12-20是小明制作的杆秤的示意图,使用时,将待称物体挂在秤钩上,用手提起B或C处(相当于支点)的秤纽,移动秤砣在秤杆上的位置D,使秤杆达到水平平衡的状态时可读出待称物体的质量,此秤最大
称量是10 kg,秤砣最远可移至E点。
秤杆和秤钩的质量忽略不计,AB、
BC、BE的长度如图所示。问:
(g取10 N/kg)
(1)提起哪处的秤纽,此秤的称量最大?
(2)秤砣的质量为多少?
(3)当提起C处秤纽称一袋质量为2 kg的荔枝时,D与C之间的距离为多少?
考点3 滑轮[10年6考:2015年(填空)、2016年(作图)、2018年(填空和作图)、2019年(计算)、2021年(填空)、2022年(选择)考查]
8. (2022广东)分别使用下列四种装置匀速提升同一重物,不计滑轮重、绳重和摩擦,最省力的是( )
A
9. (2020广东节选)如图1-12-21所示,人向下拉绳提升重物。已知物体重为400 N,动滑轮重为60 N,不计绳重及摩擦,将重物匀速提升0.5 m,人需用的拉力为_________N,绳子自由端移动的距离为__________m。
230
1
10. 请画出图1-12-22中滑轮组最省力且站在地面向下拉绳的绕法。
如答图1-12-8所示。
考点4 综合真题
11. 【科学思维】(2018广东)a、b两种实心物体的质量与体积的关系如图1-12-23甲所示,把体积相等的a、b物体挂在滑轮组下,若要使它们均处于静止状态,则图1-12-23乙的虚线框内悬挂b物体的个数是(不计绳重、滑轮重和摩擦)( )
A. 1 个 B. 2 个
C. 3 个 D. 4 个
B
12. (2021广东节选)用图1-12-24甲的滑轮组提升重为200 N的物体,已知拉力F为80 N,不计绳重和摩擦,物体和绳子自由端的运动情况如图1-12-24乙所示,反映绳子自由端运动的图线是__________(填“A”或“B”),动滑轮重为__________N。
A
40
13. 【科学探究】(2022广东)在“探究杠杆的平衡条件”实验中:
(1)小明安装好杠杆后,发现其左端下沉,如图1-12-25甲所示,为使杠杆在水平位置平衡,应将平衡螺母向__________调节。
右
(2)如图1-12-25乙所示,调节杠杆水平平衡后,在A处悬挂
3个钩码,每个钩码重为0.5 N。如果在B处施加一个拉力使杠杆在水平位置再次平衡,当方向为______________时,拉力最小,大小为__________N。
竖直向下
2
(3)课后,小明制作了一个简易杠杆,调节杠杆在水平位置平衡,然后在它两边恰当位置分别放上不同数量的同种硬币,使其在水平位置再次平衡,如图1-12-25丙所示,则力臂l1∶l2=__________,若两边同时各取走一枚硬币,则杠杆的_________端将下沉。
2∶1
右
14. 【物理学与工程实践】(2023广东)明代宋应星在《天工开物》中记载的农业生产汲水装置——辘轳,沿用至今。图1-12-26甲是一种辘轳,由具有共同转动轴的大轮和小轮组成。提水时,用力使大轮转动,小轮随之转动并缠绕井绳,提起水桶。
(1)图甲中的辘轳可视为不等臂杠杆,为方便提水,它是按照__________(填“省力”或“费力”)杠杆来设计的。某个时刻用辘轳提水的示意图如图1-12-26乙所示,它的支点是“A”“B”或“C”中的__________点。
省力
B
(2)设大轮与小轮的半径之比为3∶1,水桶受到的总重力为
90 N。使周长为3 m的大轮转动一圈,水桶匀速上升,井绳对水桶做功_______J;若要使辘轳静止在如图乙所示的位置,作用在C点处最小的力应为________N。(不计井绳的粗细和自重)
90
30
(3)如图1-12-26丙所示,水龙头开关的设计也应用了同样的原理,为了更省力,开关应选用________(填“①”或“②”)。
①
同课章节目录