第十二章 简单机械 杠杆和滑轮 重点作图题 专题练 2024-2025学年下期初中物理人教版八年级下册(新教材)
文档属性
| 名称 | 第十二章 简单机械 杠杆和滑轮 重点作图题 专题练 2024-2025学年下期初中物理人教版八年级下册(新教材) |
|
|
| 格式 | docx | ||
| 文件大小 | 2.6MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 人教版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-06-03 00:00:00 | ||
图片预览

文档简介
中小学教育资源及组卷应用平台
简单机械 杠杆和滑轮 重点作图题 专题练 2024-2025学年 下期初中物理人教版八年级下册(新教材)
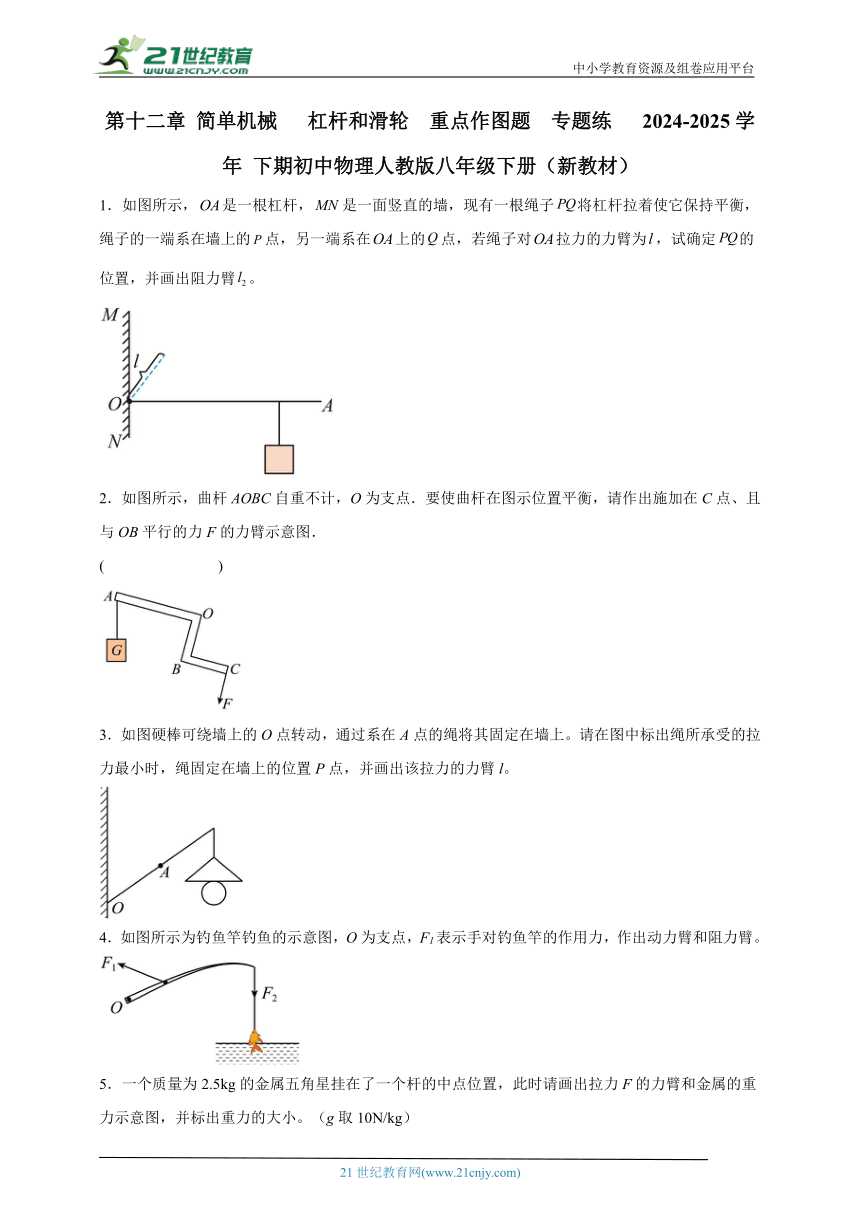
1.如图所示,是一根杠杆,是一面竖直的墙,现有一根绳子将杠杆拉着使它保持平衡,绳子的一端系在墙上的点,另一端系在上的点,若绳子对拉力的力臂为,试确定的位置,并画出阻力臂。
2.如图所示,曲杆AOBC自重不计,O为支点.要使曲杆在图示位置平衡,请作出施加在C点、且与OB平行的力F的力臂示意图.
( )
3.如图硬棒可绕墙上的O点转动,通过系在A点的绳将其固定在墙上。请在图中标出绳所承受的拉力最小时,绳固定在墙上的位置P点,并画出该拉力的力臂l。
4.如图所示为钓鱼竿钓鱼的示意图,O为支点,F1表示手对钓鱼竿的作用力,作出动力臂和阻力臂。
5.一个质量为2.5kg的金属五角星挂在了一个杆的中点位置,此时请画出拉力F的力臂和金属的重力示意图,并标出重力的大小。(g取10N/kg)
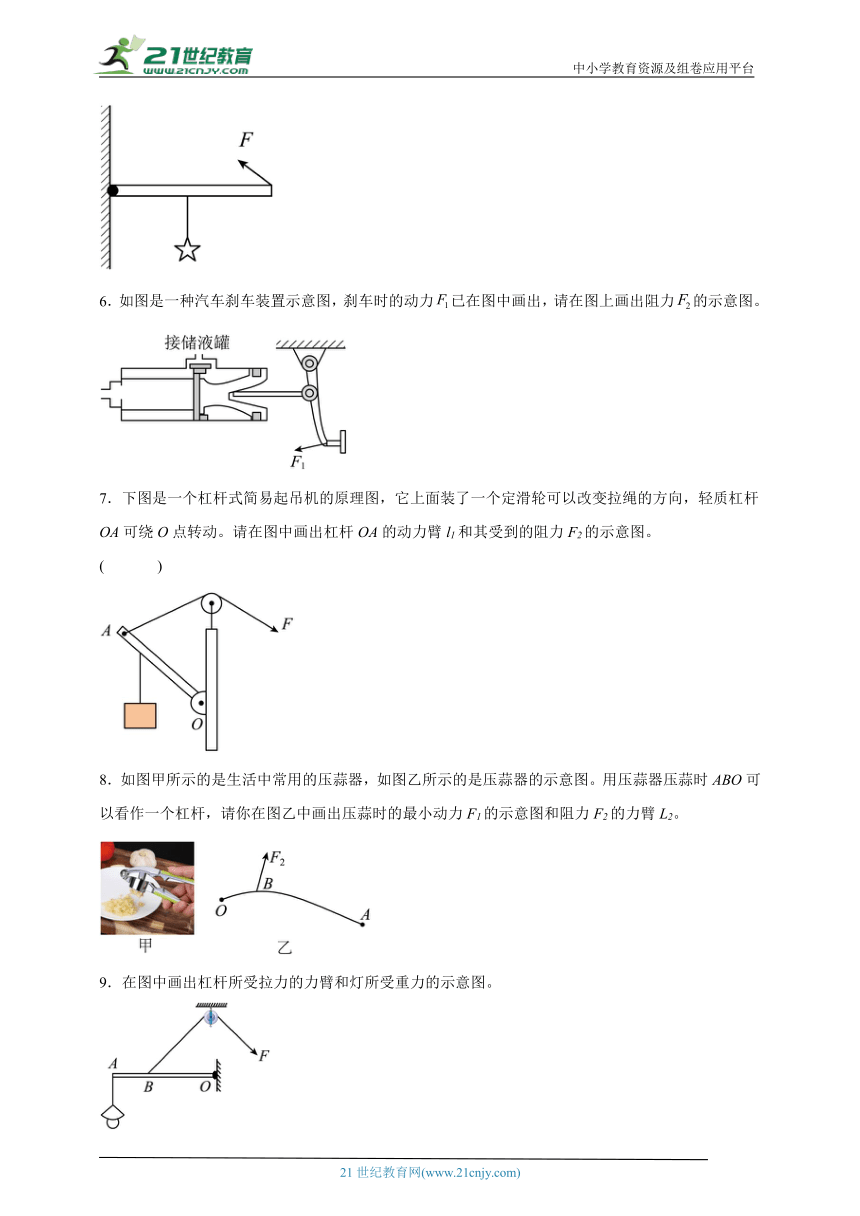
6.如图是一种汽车刹车装置示意图,刹车时的动力已在图中画出,请在图上画出阻力的示意图。
7.下图是一个杠杆式简易起吊机的原理图,它上面装了一个定滑轮可以改变拉绳的方向,轻质杠杆OA可绕O点转动。请在图中画出杠杆OA的动力臂l1和其受到的阻力F2的示意图。
( )
8.如图甲所示的是生活中常用的压蒜器,如图乙所示的是压蒜器的示意图。用压蒜器压蒜时ABO可以看作一个杠杆,请你在图乙中画出压蒜时的最小动力F1的示意图和阻力F2的力臂L2。
9.在图中画出杠杆所受拉力的力臂和灯所受重力的示意图。
10.为使轻质杠杆AB在如图所示位置静止,请你在杠杆上画出所施加最小动力F1的示意图,并作出阻力F2的力臂l2.
( )
11.如图所示,杠杆处于静止状态,请画出力的力臂及力。(已知垂直于杆)
12.植树节当天,学校初二年级开展植树活动。同学们分工合作,如图甲,小高正在用铁锹铲土。将铁锹视为杠杆,O为支点,请在图乙中画出:①手在A处施加的最小动力F的示意图;②F的力臂L。
13.如图所示,装置吊重为G的物体,要使杠杆平衡,画出在A点所加最小力F的示意图,并作出F的力臂。
14.图甲是自行车的手闸,其中ABO部分可视为一种杠杆,其简化示意图如图乙所示,O为支点,F2为阻力,请在图乙中画出:(1)作用在A点的最小动力F1及其力臂;(2)阻力F2的力臂。
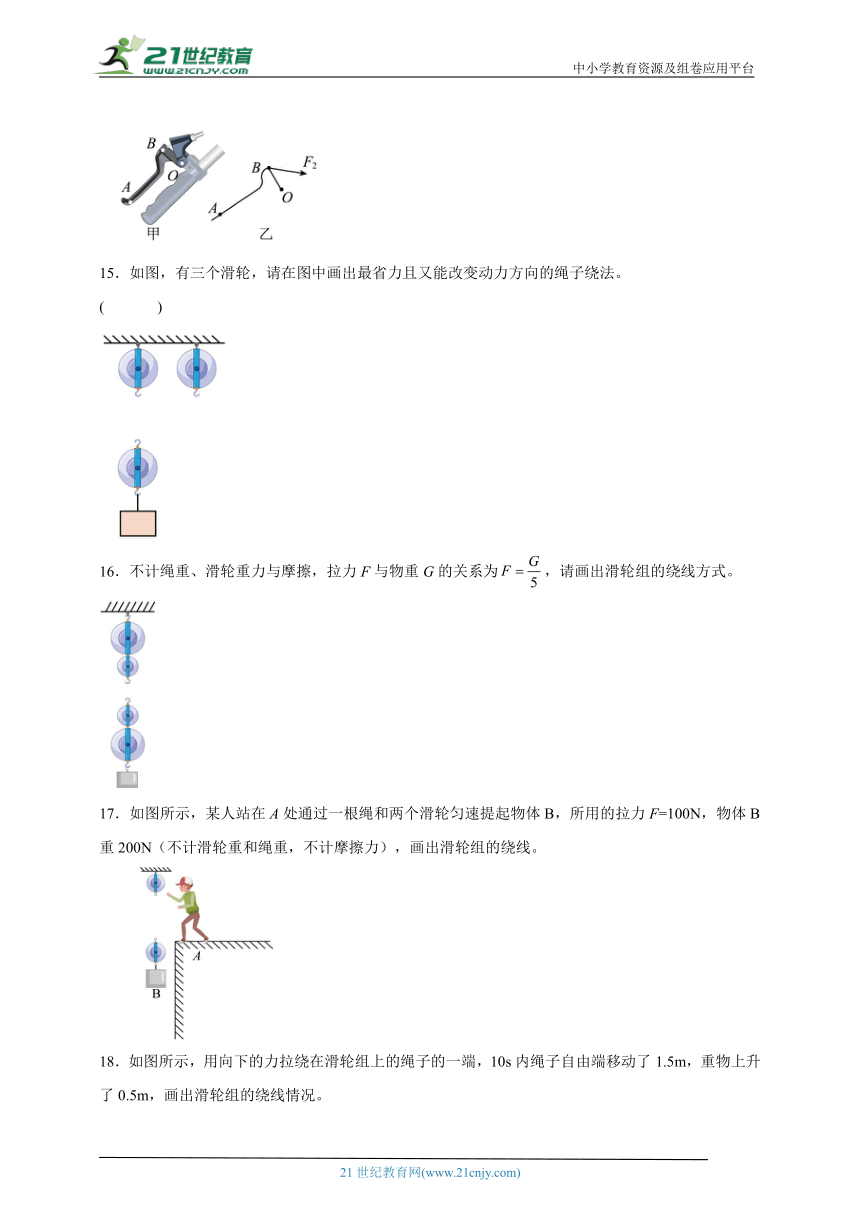
15.如图,有三个滑轮,请在图中画出最省力且又能改变动力方向的绳子绕法。
( )
16.不计绳重、滑轮重力与摩擦,拉力F与物重G的关系为,请画出滑轮组的绕线方式。
17.如图所示,某人站在A处通过一根绳和两个滑轮匀速提起物体B,所用的拉力F=100N,物体B重200N(不计滑轮重和绳重,不计摩擦力),画出滑轮组的绕线。
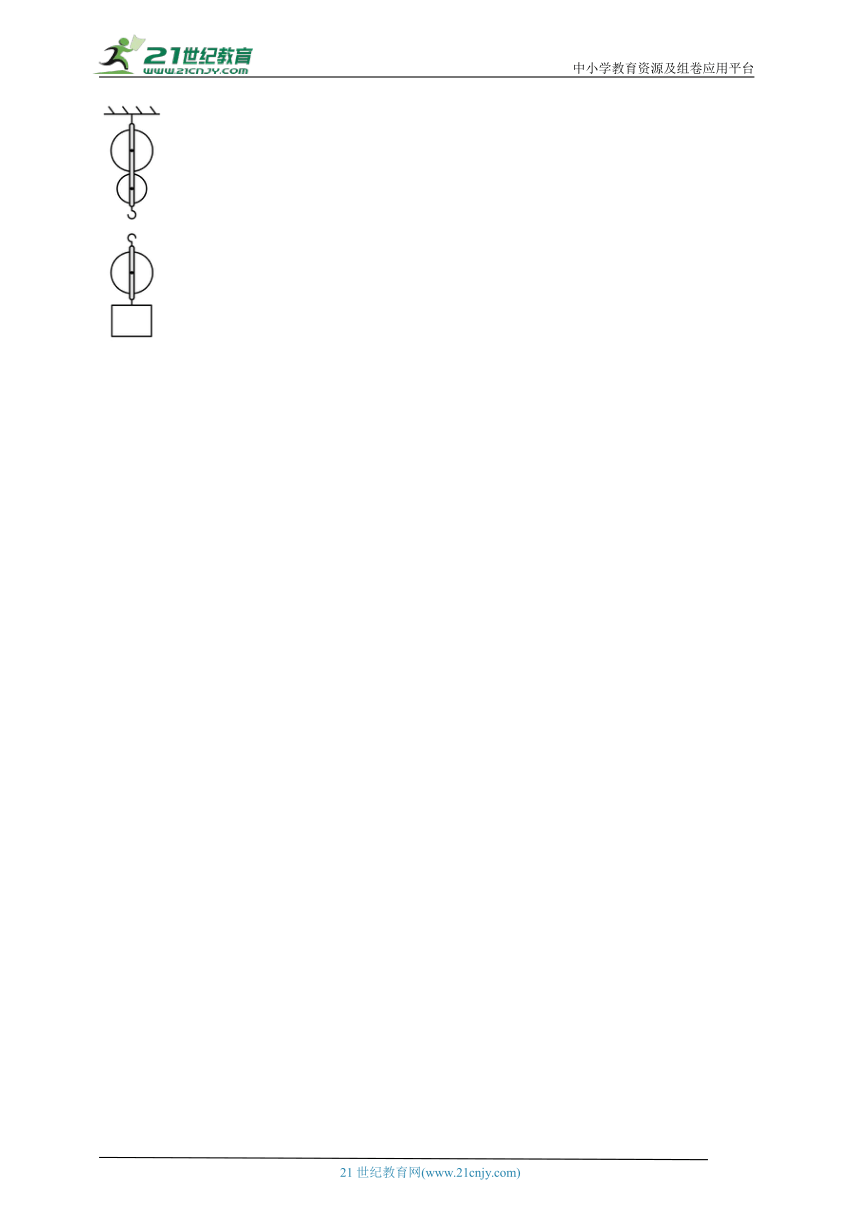
18.如图所示,用向下的力拉绕在滑轮组上的绳子的一端,10s内绳子自由端移动了1.5m,重物上升了0.5m,画出滑轮组的绕线情况。
参考答案
1.
【详解】因为力的作用线与力臂垂直,所以过力臂的另一端点作与力臂垂直的直线交MN于P,交OA于Q,即为绳子PQ,由题意可知,阻力为物体通过绳子对杠杆施加的拉力,因此过O点向阻力作用线作垂线即为阻力臂,如图所示:
2.
【详解】反向延长力F的作用线,过支点O点作力F作用线的垂线L即为F的力臂,如下图所示:
3.
【详解】在阻力和阻力臂不变时,要使动力(拉力)最小,需使动力臂最大,绳对杠杆的拉力作用在A点,只有OA作为动力臂时,动力最小,故过A点做与硬棒垂直的直线代表绳子,与墙壁交于P点,即为绳子的位置。OA为动力臂,用大括号标出,并标l,如图:
4.
【详解】力臂是支点到力的作用线的距离,过O点做力F1的作用线的垂线段为动力臂l1;过O点做阻力F2的作用线的垂线段为阻力臂l2,如图
5.
【详解】拉力F的力臂为支点到拉力F作用线的垂线段;五角星受到的重力竖直向下,大小为
作用点为物体的重心上,如图所示:
6.
【详解】刹车时,踏杆的上端为支点,刹车时的动力推动连杆向左运动,连杆给踏板向左的力F2为阻力,如图所示:
7.
【详解】杠杆OA受到绳子的拉力斜向上,从支点O向动力作用线作垂线段,即为动力臂l1;物体对杠杆的拉力为阻力F2,方向竖直向下,标上字母F2;如图所示:
8.
【详解】图中的压蒜器在压蒜时,支点在O点,由图知,阻力F2的方向向上,阻力有绕着O点逆时针转动的效果,为使杠杆平衡,则动力F1应绕着O点按顺时针方向转动,故动力F1的方向斜向下方,作用点在A点,根据杠杆平衡条件,当动力F1垂直OA时,OA为最大动力臂,动力最小,如下图所示,由支点O向阻力F2的作用线作垂线段,即为阻力臂L2,如下图所示
9.
【详解】绳子对杠杆的拉力作用在B点,拉力的方向斜向右上方,过支点O作这条拉力作用线的垂线段,即拉力的力臂l;重力的方向是竖直向下的,过照明灯重心画一条带箭头的竖直向下的有向线段,用G表示,即为其所受重力的示意图。如图所示
10.
【详解】在阻力与阻力臂的乘积一定的情况下,最省力,即动力臂最长,由图知OB比OA长,所以OB做动力臂最长,过B点与OB垂直向上作垂线就得到动力F的方向,如下图所示:
做出阻力作用线,则支点O到阻力作用线的垂直距离为阻力臂L2.
11.
【详解】过支点O做力F1的垂线段即为F1的力臂l1;已知F2的力臂,过力臂l2的上端点做一条垂线,垂线与杠杆的交点为F2的作用点,方向水平向左,如图所示:
12.
【详解】手在A处施加最小动力F时,由杠杆平衡条件可知,此时动力臂最长,最长的动力臂为OA,过A点做垂直于OA向上的力为最小动力F,如下图所示:
13.
【详解】根据杠杆的平衡条件:F1l1=F2l2可知,在阻力和阻力臂不变的情况下,要使动力最小,就要使动力臂最大,即在杠杆上找一点,使其到支点的距离最长,这个距离即为动力臂。由图可知,在杠杆上A点到支点O的距离最大,过A沿斜向上的方向做OA的垂线即为最小的动力F。OA即为F的力臂l。如图所示:
14.
【详解】(1)由杠杆平衡条件可知,当阻力与阻力臂乘积一定时,动力臂越长,动力越小,图中O为支点,因此OA作为动力臂最长;动力方向应该向下,过点A垂直于OA向下作出最小动力F1的示意图。
(2)从支点O作阻力F2作用线的垂线,支点到垂足的距离为阻力臂,如图所示:
15.
【详解】由于要求既可以省力又可以改变力的方向,所以绳子自由端拉力的方向必须向下,则绳子从动滑轮上面的挂钩开始绕起,如图所示:
。
16.
【详解】不计绳重、滑轮重力与摩擦,绳末端的拉力为,根据题意,n=5,则连接动滑轮绳子的股数是5股,根据偶定奇动,作图如图所示:
17.
【详解】不计滑轮重和绳重,不计摩擦力,承担物重的绳子段数为
滑轮组由2段绳子承担物重,根据“奇动偶定”原则可知,绳子的起点在定滑轮的挂钩上,绕线如图所示:
18.
【详解】由题意可知,向下拉绳子时,承担动滑轮和物体总重的绳子有效股数
根据“奇动偶定”的原则,绳子的固定端应先系在动滑轮挂钩上,据此绕线,如图所示:
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)
简单机械 杠杆和滑轮 重点作图题 专题练 2024-2025学年 下期初中物理人教版八年级下册(新教材)
1.如图所示,是一根杠杆,是一面竖直的墙,现有一根绳子将杠杆拉着使它保持平衡,绳子的一端系在墙上的点,另一端系在上的点,若绳子对拉力的力臂为,试确定的位置,并画出阻力臂。
2.如图所示,曲杆AOBC自重不计,O为支点.要使曲杆在图示位置平衡,请作出施加在C点、且与OB平行的力F的力臂示意图.
( )
3.如图硬棒可绕墙上的O点转动,通过系在A点的绳将其固定在墙上。请在图中标出绳所承受的拉力最小时,绳固定在墙上的位置P点,并画出该拉力的力臂l。
4.如图所示为钓鱼竿钓鱼的示意图,O为支点,F1表示手对钓鱼竿的作用力,作出动力臂和阻力臂。
5.一个质量为2.5kg的金属五角星挂在了一个杆的中点位置,此时请画出拉力F的力臂和金属的重力示意图,并标出重力的大小。(g取10N/kg)
6.如图是一种汽车刹车装置示意图,刹车时的动力已在图中画出,请在图上画出阻力的示意图。
7.下图是一个杠杆式简易起吊机的原理图,它上面装了一个定滑轮可以改变拉绳的方向,轻质杠杆OA可绕O点转动。请在图中画出杠杆OA的动力臂l1和其受到的阻力F2的示意图。
( )
8.如图甲所示的是生活中常用的压蒜器,如图乙所示的是压蒜器的示意图。用压蒜器压蒜时ABO可以看作一个杠杆,请你在图乙中画出压蒜时的最小动力F1的示意图和阻力F2的力臂L2。
9.在图中画出杠杆所受拉力的力臂和灯所受重力的示意图。
10.为使轻质杠杆AB在如图所示位置静止,请你在杠杆上画出所施加最小动力F1的示意图,并作出阻力F2的力臂l2.
( )
11.如图所示,杠杆处于静止状态,请画出力的力臂及力。(已知垂直于杆)
12.植树节当天,学校初二年级开展植树活动。同学们分工合作,如图甲,小高正在用铁锹铲土。将铁锹视为杠杆,O为支点,请在图乙中画出:①手在A处施加的最小动力F的示意图;②F的力臂L。
13.如图所示,装置吊重为G的物体,要使杠杆平衡,画出在A点所加最小力F的示意图,并作出F的力臂。
14.图甲是自行车的手闸,其中ABO部分可视为一种杠杆,其简化示意图如图乙所示,O为支点,F2为阻力,请在图乙中画出:(1)作用在A点的最小动力F1及其力臂;(2)阻力F2的力臂。
15.如图,有三个滑轮,请在图中画出最省力且又能改变动力方向的绳子绕法。
( )
16.不计绳重、滑轮重力与摩擦,拉力F与物重G的关系为,请画出滑轮组的绕线方式。
17.如图所示,某人站在A处通过一根绳和两个滑轮匀速提起物体B,所用的拉力F=100N,物体B重200N(不计滑轮重和绳重,不计摩擦力),画出滑轮组的绕线。
18.如图所示,用向下的力拉绕在滑轮组上的绳子的一端,10s内绳子自由端移动了1.5m,重物上升了0.5m,画出滑轮组的绕线情况。
参考答案
1.
【详解】因为力的作用线与力臂垂直,所以过力臂的另一端点作与力臂垂直的直线交MN于P,交OA于Q,即为绳子PQ,由题意可知,阻力为物体通过绳子对杠杆施加的拉力,因此过O点向阻力作用线作垂线即为阻力臂,如图所示:
2.
【详解】反向延长力F的作用线,过支点O点作力F作用线的垂线L即为F的力臂,如下图所示:
3.
【详解】在阻力和阻力臂不变时,要使动力(拉力)最小,需使动力臂最大,绳对杠杆的拉力作用在A点,只有OA作为动力臂时,动力最小,故过A点做与硬棒垂直的直线代表绳子,与墙壁交于P点,即为绳子的位置。OA为动力臂,用大括号标出,并标l,如图:
4.
【详解】力臂是支点到力的作用线的距离,过O点做力F1的作用线的垂线段为动力臂l1;过O点做阻力F2的作用线的垂线段为阻力臂l2,如图
5.
【详解】拉力F的力臂为支点到拉力F作用线的垂线段;五角星受到的重力竖直向下,大小为
作用点为物体的重心上,如图所示:
6.
【详解】刹车时,踏杆的上端为支点,刹车时的动力推动连杆向左运动,连杆给踏板向左的力F2为阻力,如图所示:
7.
【详解】杠杆OA受到绳子的拉力斜向上,从支点O向动力作用线作垂线段,即为动力臂l1;物体对杠杆的拉力为阻力F2,方向竖直向下,标上字母F2;如图所示:
8.
【详解】图中的压蒜器在压蒜时,支点在O点,由图知,阻力F2的方向向上,阻力有绕着O点逆时针转动的效果,为使杠杆平衡,则动力F1应绕着O点按顺时针方向转动,故动力F1的方向斜向下方,作用点在A点,根据杠杆平衡条件,当动力F1垂直OA时,OA为最大动力臂,动力最小,如下图所示,由支点O向阻力F2的作用线作垂线段,即为阻力臂L2,如下图所示
9.
【详解】绳子对杠杆的拉力作用在B点,拉力的方向斜向右上方,过支点O作这条拉力作用线的垂线段,即拉力的力臂l;重力的方向是竖直向下的,过照明灯重心画一条带箭头的竖直向下的有向线段,用G表示,即为其所受重力的示意图。如图所示
10.
【详解】在阻力与阻力臂的乘积一定的情况下,最省力,即动力臂最长,由图知OB比OA长,所以OB做动力臂最长,过B点与OB垂直向上作垂线就得到动力F的方向,如下图所示:
做出阻力作用线,则支点O到阻力作用线的垂直距离为阻力臂L2.
11.
【详解】过支点O做力F1的垂线段即为F1的力臂l1;已知F2的力臂,过力臂l2的上端点做一条垂线,垂线与杠杆的交点为F2的作用点,方向水平向左,如图所示:
12.
【详解】手在A处施加最小动力F时,由杠杆平衡条件可知,此时动力臂最长,最长的动力臂为OA,过A点做垂直于OA向上的力为最小动力F,如下图所示:
13.
【详解】根据杠杆的平衡条件:F1l1=F2l2可知,在阻力和阻力臂不变的情况下,要使动力最小,就要使动力臂最大,即在杠杆上找一点,使其到支点的距离最长,这个距离即为动力臂。由图可知,在杠杆上A点到支点O的距离最大,过A沿斜向上的方向做OA的垂线即为最小的动力F。OA即为F的力臂l。如图所示:
14.
【详解】(1)由杠杆平衡条件可知,当阻力与阻力臂乘积一定时,动力臂越长,动力越小,图中O为支点,因此OA作为动力臂最长;动力方向应该向下,过点A垂直于OA向下作出最小动力F1的示意图。
(2)从支点O作阻力F2作用线的垂线,支点到垂足的距离为阻力臂,如图所示:
15.
【详解】由于要求既可以省力又可以改变力的方向,所以绳子自由端拉力的方向必须向下,则绳子从动滑轮上面的挂钩开始绕起,如图所示:
。
16.
【详解】不计绳重、滑轮重力与摩擦,绳末端的拉力为,根据题意,n=5,则连接动滑轮绳子的股数是5股,根据偶定奇动,作图如图所示:
17.
【详解】不计滑轮重和绳重,不计摩擦力,承担物重的绳子段数为
滑轮组由2段绳子承担物重,根据“奇动偶定”原则可知,绳子的起点在定滑轮的挂钩上,绕线如图所示:
18.
【详解】由题意可知,向下拉绳子时,承担动滑轮和物体总重的绳子有效股数
根据“奇动偶定”的原则,绳子的固定端应先系在动滑轮挂钩上,据此绕线,如图所示:
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
21世纪教育网(www.21cnjy.com)