11.1 课时1 杠杆及其平衡条件(共31张PPT)2024-2025学年教科版(2024)初中物理八年级下册
文档属性
| 名称 | 11.1 课时1 杠杆及其平衡条件(共31张PPT)2024-2025学年教科版(2024)初中物理八年级下册 |
|
|
| 格式 | pptx | ||
| 文件大小 | 47.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 教科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-06-03 00:00:00 | ||
图片预览

文档简介
(共31张PPT)
第11章 机械与功
第1节 课时1 杠杆及其平衡条件
1.通过生活中的实物,感受杠杆的作用,建构杠杆模型。
2.了解杠杆的五要素。
3.通过实验探究杠杆的平衡条件。(重点)
4.能找到并画出五要素并画出。(难点)
“给我一个支点,我能撬动整个地球。”
——阿基米德
是什么给这一不可能的事情增添了可能性呢?
人类在漫长的历史中创造了各种各样的工具,使工作更省力、更方便,这些工具统称为机械。
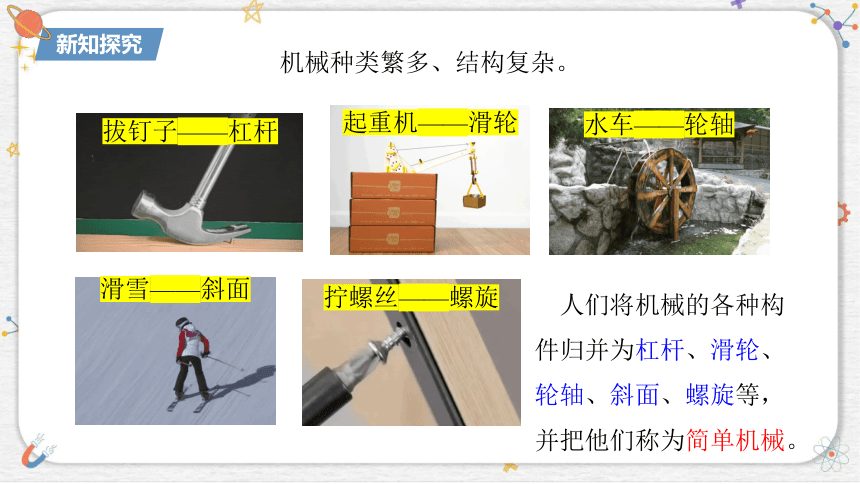
起重机——滑轮
水车——轮轴
滑雪——斜面
拧螺丝——螺旋
机械种类繁多、结构复杂。
人们将机械的各种构件归并为杠杆、滑轮、轮轴、斜面、螺旋等,并把他们称为简单机械。
拔钉子——杠杆
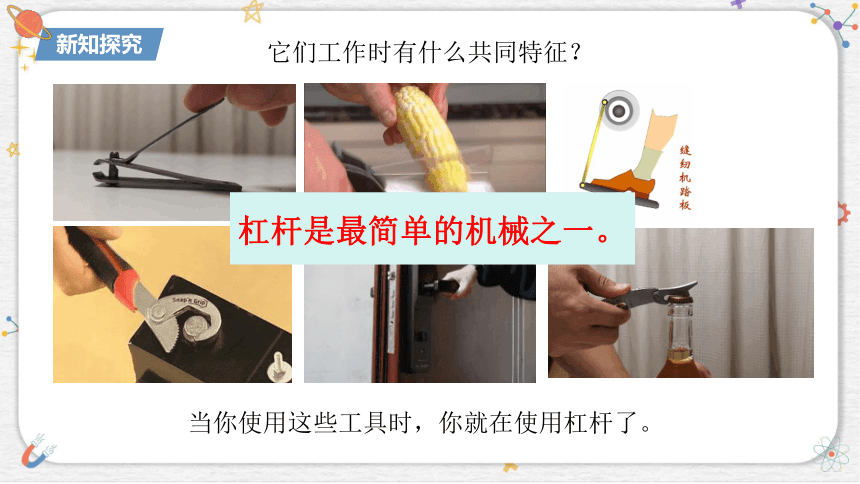
杠杆是最简单的机械之一。
当你使用这些工具时,你就在使用杠杆了。
它们工作时有什么共同特征?
1. 定义:在力的作用下能够绕支撑点转动的坚实物体都可以看作杠杆。
2. 特点:
①有力的作用
②能够绕支撑点转动
③不易发生形变的坚实物体
杠杆不一定是直棒,也可以是弯的或其他形状,如剪刀、羊角锤等。
知识点一:认识杠杆
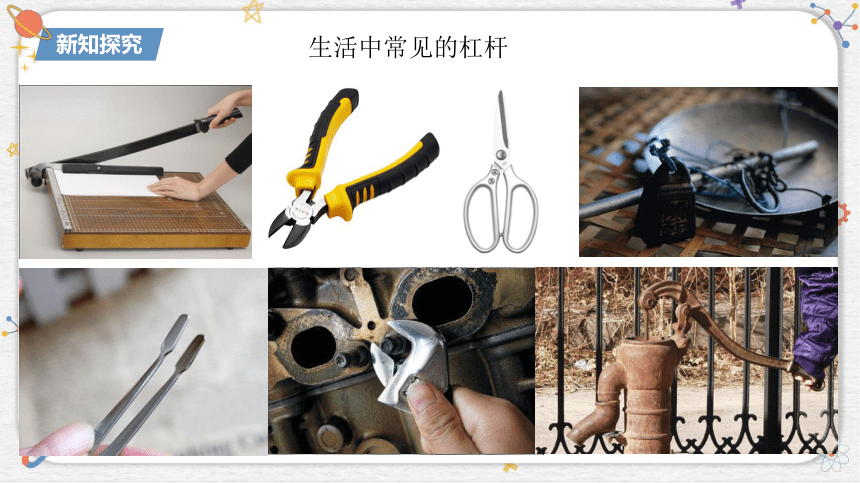
生活中常见的杠杆
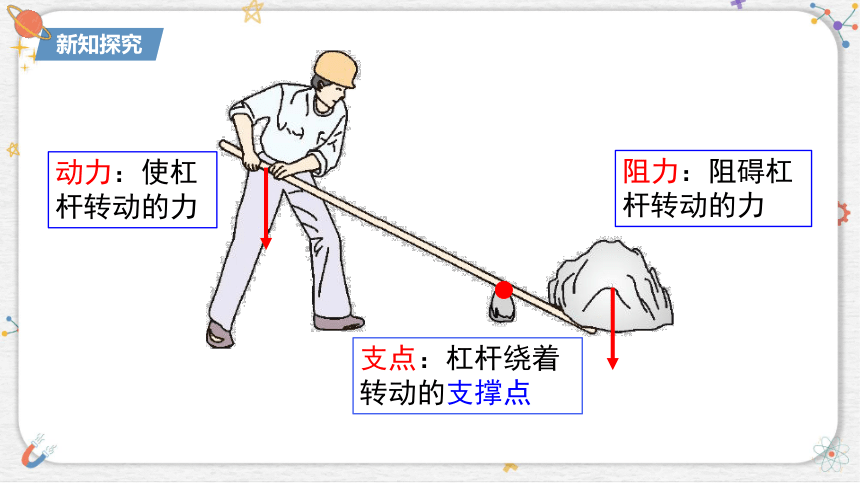
支点:杠杆绕着转动的支撑点
动力:使杠杆转动的力
阻力:阻碍杠杆转动的力
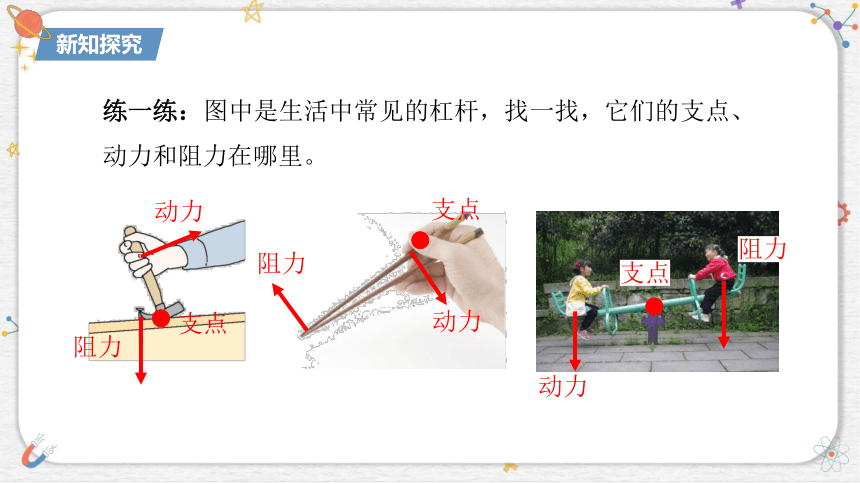
练一练:图中是生活中常见的杠杆,找一找,它们的支点、动力和阻力在哪里。
支点
动力
阻力
支点
动力
阻力
支点
动力
阻力
复杂的机械是由简单机械组成的。挖掘机、拖拉机、汽车、起重机等许多机器中都包含了各式各样的杠杆。
在使用杠杆中,杠杆的平衡状态是一种非常重要的状态。
杠杆平衡
当动力和阻力对杠杆的转动效果互相抵消时,杠杆将处于平衡状态,这种状态叫作杠杆平衡。
杠杆在满足什么条件时才会平衡?
所谓平衡状态
杠杆处于静止状态或绕支点匀速转动的状态都叫平衡状态。
知识点二:杠杆的平衡条件
思考
杠杆的平衡不仅与动力和阻力的大小有关,还与力的作用点及力的方向有关。
力的作用点
力的方向
动力的作用点
阻力的作用点
动力的方向
阻力的方向
动力的作用线
阻力的作用线
1. 力的作用线
2. 杠杆的五要素
支点
O
动力 F1
阻力 F2
动力臂L1
阻力臂 L2
支点:杠杆可以绕其转动的点(O点)
动力:使杠杆转动的力(F1)
阻力:阻碍杠杆转动的力(F2)
动力臂: 从支点到动力F1作用线的距离(L1)
阻力臂:从支点到阻力F2作用线的距离(L2)
1. 杠杆的支点一定在杠杆上吗?
力臂是支点到力的作用线的距离,不是支点到力的作用点的距离,若力的作用线过支点,则力臂为零。
杠杆的支点一定在杠杆上,可以在杠杆的一端,也可以在杠杆中间的某点。
2. 力臂是支点到力的作用点的距离吗?
3. 若力的作用点不变,但改变力的方向,力臂改变吗?
会改变,力的方向改变,力的作用线也会改变,力臂也会改变。
思考
(1)找支点;
(2)找力的作用线,即过力的作用点沿力的方向(或反方向)画一条直线;
(3)过支点作力的作用线的垂线段,标上垂足;
(4)用大括号标出支点到垂足间的线段,标字母 L1 或 L2,该线段就是力臂。
3. 力臂的画法
动力F1
阻力F2
动力臂L1
阻力臂L2
支点
O
试一试:画出图中杠杆各力的力臂。
F1
F2
l1
l2
F1
F2
l1
O
l2
O
4. 杠杆的平衡条件
杠杆在什么条件下才平衡?
杠杆、钩码、弹簧测力计等。
【实验器材】
【实验设计】利用图中的实验装置,通过改变支点两边悬挂钩码的个数和悬挂位置,探究杠杆平衡时动力、动力臂和阻力、阻力臂之间的关系。
杠杆两端的两个螺母是起什么作用的?
【实验步骤】
1. 调节杠杆两端的螺母,使杠杆保持水平并静止,达到平衡状态。
开始不挂钩码时调节杠杆平衡
2. 如图所示,在杠杆两侧分别挂上不同数量的钩码,调节钩码的位置,使杠杆在水平位置重新平衡。将动力、动力臂、阻力、阻力臂的大小记录在表格中。
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1
2
3
3.如图所示,用弹簧测力计代替一组钩码,此时动力和阻力作用在支点同侧,方向相反,使杠杆在水平位置平衡,并将动力、动力臂、阻力、阻力臂的大小记录在表格中。
4. 重复上面的实验,并将实验数据记录在表格中。
【实验步骤】
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1
2
3
【收集证据】
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1 1.0 0.05 0.5 0.10
2 1.5 0.05 0.5 0.15
3 1.5 0.10 1.0 0.15
4 1.0 0.15 1.0 0.15
5 1.5 0.05 0.5 0.15
【交流与合作】
1. 使用时将杠杆调至水平平衡,目的是什么?
避免杠杆自身重力对实验造成影响,此时杠杆重力的作用线通过支点,其力臂为0。
2. 实验要多次测量,目的是什么?
避免偶然性,得到普遍规律。
【分析与论证】
根据表中记录的实验数据得出的结论是:
杠杆每次平衡时,动力与动力臂的乘积都等于阻力与阻力臂的乘积。
【结论】
杠杆平衡的条件是:
动力×动力臂=阻力×阻力臂
即 F1 L1 = F2 L2
五要素
平衡条件
力臂的画法
杠 杆
定义
动力×动力臂=阻力×阻力臂
即 F1 l1 = F2 l2.
支点、动力、阻力、动力臂、阻力臂
在力的作用下能绕着固定点转动的硬棒
1.两个力作用在杠杆两端使杠杆平衡,则( )
A.这两个力的大小必须相等
B.这两个力的力臂长必须相等
C.力臂较长的那个力比较大
D.力臂较长的那个力比较小
D
2.下列杠杆平衡的是(杆重和摩擦力均不计) ( )
C
3.如图所示的杠杆处于水平平衡,若在杠杆两边的钩码下再加一个钩码(钩码的质量都相同),杠杆将( )
A.还继续处于水平平衡
B.右端上升,左端下降
C.右端下降,左端上升
D.无法确定杠杆的运动状态
C
4.如图,在刻度均匀的轻质杠杆的 A 点悬挂一个重为 4 N 的物体,在 B 点施加一个竖直向下的作用力 F,使杠杆在水平位置保持平衡,则 F =____N;若保持物体悬挂的位置不变,改变力F的方向(如图虚线所示),杠杆仍在水平位置保持平衡,则力 F 将________(选填“不变”“变大”或“变小”)。
3
变大
5.如图是小兰探究“杠杆平衡条件”的实验装置和操作图。关于此实验,下列说法正确的是( )
A.为使图甲中杠杆在水平位置平衡,应将平衡螺母向右调
B.实验过程中不能再调节平衡螺母
C.图乙中要使杠杆保持水平平衡,需要在 D点
挂5个相同的钩码
D.为了保持杠杆在水平位置平衡,在D点施加
拉力的方向由①位置到②位置的过程中,所
需施加的拉力大小不变
B
第11章 机械与功
第1节 课时1 杠杆及其平衡条件
1.通过生活中的实物,感受杠杆的作用,建构杠杆模型。
2.了解杠杆的五要素。
3.通过实验探究杠杆的平衡条件。(重点)
4.能找到并画出五要素并画出。(难点)
“给我一个支点,我能撬动整个地球。”
——阿基米德
是什么给这一不可能的事情增添了可能性呢?
人类在漫长的历史中创造了各种各样的工具,使工作更省力、更方便,这些工具统称为机械。
起重机——滑轮
水车——轮轴
滑雪——斜面
拧螺丝——螺旋
机械种类繁多、结构复杂。
人们将机械的各种构件归并为杠杆、滑轮、轮轴、斜面、螺旋等,并把他们称为简单机械。
拔钉子——杠杆
杠杆是最简单的机械之一。
当你使用这些工具时,你就在使用杠杆了。
它们工作时有什么共同特征?
1. 定义:在力的作用下能够绕支撑点转动的坚实物体都可以看作杠杆。
2. 特点:
①有力的作用
②能够绕支撑点转动
③不易发生形变的坚实物体
杠杆不一定是直棒,也可以是弯的或其他形状,如剪刀、羊角锤等。
知识点一:认识杠杆
生活中常见的杠杆
支点:杠杆绕着转动的支撑点
动力:使杠杆转动的力
阻力:阻碍杠杆转动的力
练一练:图中是生活中常见的杠杆,找一找,它们的支点、动力和阻力在哪里。
支点
动力
阻力
支点
动力
阻力
支点
动力
阻力
复杂的机械是由简单机械组成的。挖掘机、拖拉机、汽车、起重机等许多机器中都包含了各式各样的杠杆。
在使用杠杆中,杠杆的平衡状态是一种非常重要的状态。
杠杆平衡
当动力和阻力对杠杆的转动效果互相抵消时,杠杆将处于平衡状态,这种状态叫作杠杆平衡。
杠杆在满足什么条件时才会平衡?
所谓平衡状态
杠杆处于静止状态或绕支点匀速转动的状态都叫平衡状态。
知识点二:杠杆的平衡条件
思考
杠杆的平衡不仅与动力和阻力的大小有关,还与力的作用点及力的方向有关。
力的作用点
力的方向
动力的作用点
阻力的作用点
动力的方向
阻力的方向
动力的作用线
阻力的作用线
1. 力的作用线
2. 杠杆的五要素
支点
O
动力 F1
阻力 F2
动力臂L1
阻力臂 L2
支点:杠杆可以绕其转动的点(O点)
动力:使杠杆转动的力(F1)
阻力:阻碍杠杆转动的力(F2)
动力臂: 从支点到动力F1作用线的距离(L1)
阻力臂:从支点到阻力F2作用线的距离(L2)
1. 杠杆的支点一定在杠杆上吗?
力臂是支点到力的作用线的距离,不是支点到力的作用点的距离,若力的作用线过支点,则力臂为零。
杠杆的支点一定在杠杆上,可以在杠杆的一端,也可以在杠杆中间的某点。
2. 力臂是支点到力的作用点的距离吗?
3. 若力的作用点不变,但改变力的方向,力臂改变吗?
会改变,力的方向改变,力的作用线也会改变,力臂也会改变。
思考
(1)找支点;
(2)找力的作用线,即过力的作用点沿力的方向(或反方向)画一条直线;
(3)过支点作力的作用线的垂线段,标上垂足;
(4)用大括号标出支点到垂足间的线段,标字母 L1 或 L2,该线段就是力臂。
3. 力臂的画法
动力F1
阻力F2
动力臂L1
阻力臂L2
支点
O
试一试:画出图中杠杆各力的力臂。
F1
F2
l1
l2
F1
F2
l1
O
l2
O
4. 杠杆的平衡条件
杠杆在什么条件下才平衡?
杠杆、钩码、弹簧测力计等。
【实验器材】
【实验设计】利用图中的实验装置,通过改变支点两边悬挂钩码的个数和悬挂位置,探究杠杆平衡时动力、动力臂和阻力、阻力臂之间的关系。
杠杆两端的两个螺母是起什么作用的?
【实验步骤】
1. 调节杠杆两端的螺母,使杠杆保持水平并静止,达到平衡状态。
开始不挂钩码时调节杠杆平衡
2. 如图所示,在杠杆两侧分别挂上不同数量的钩码,调节钩码的位置,使杠杆在水平位置重新平衡。将动力、动力臂、阻力、阻力臂的大小记录在表格中。
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1
2
3
3.如图所示,用弹簧测力计代替一组钩码,此时动力和阻力作用在支点同侧,方向相反,使杠杆在水平位置平衡,并将动力、动力臂、阻力、阻力臂的大小记录在表格中。
4. 重复上面的实验,并将实验数据记录在表格中。
【实验步骤】
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1
2
3
【收集证据】
实验次数 动力F1/N 动力臂L1/m 阻力F2/N 阻力臂L2/m
1 1.0 0.05 0.5 0.10
2 1.5 0.05 0.5 0.15
3 1.5 0.10 1.0 0.15
4 1.0 0.15 1.0 0.15
5 1.5 0.05 0.5 0.15
【交流与合作】
1. 使用时将杠杆调至水平平衡,目的是什么?
避免杠杆自身重力对实验造成影响,此时杠杆重力的作用线通过支点,其力臂为0。
2. 实验要多次测量,目的是什么?
避免偶然性,得到普遍规律。
【分析与论证】
根据表中记录的实验数据得出的结论是:
杠杆每次平衡时,动力与动力臂的乘积都等于阻力与阻力臂的乘积。
【结论】
杠杆平衡的条件是:
动力×动力臂=阻力×阻力臂
即 F1 L1 = F2 L2
五要素
平衡条件
力臂的画法
杠 杆
定义
动力×动力臂=阻力×阻力臂
即 F1 l1 = F2 l2.
支点、动力、阻力、动力臂、阻力臂
在力的作用下能绕着固定点转动的硬棒
1.两个力作用在杠杆两端使杠杆平衡,则( )
A.这两个力的大小必须相等
B.这两个力的力臂长必须相等
C.力臂较长的那个力比较大
D.力臂较长的那个力比较小
D
2.下列杠杆平衡的是(杆重和摩擦力均不计) ( )
C
3.如图所示的杠杆处于水平平衡,若在杠杆两边的钩码下再加一个钩码(钩码的质量都相同),杠杆将( )
A.还继续处于水平平衡
B.右端上升,左端下降
C.右端下降,左端上升
D.无法确定杠杆的运动状态
C
4.如图,在刻度均匀的轻质杠杆的 A 点悬挂一个重为 4 N 的物体,在 B 点施加一个竖直向下的作用力 F,使杠杆在水平位置保持平衡,则 F =____N;若保持物体悬挂的位置不变,改变力F的方向(如图虚线所示),杠杆仍在水平位置保持平衡,则力 F 将________(选填“不变”“变大”或“变小”)。
3
变大
5.如图是小兰探究“杠杆平衡条件”的实验装置和操作图。关于此实验,下列说法正确的是( )
A.为使图甲中杠杆在水平位置平衡,应将平衡螺母向右调
B.实验过程中不能再调节平衡螺母
C.图乙中要使杠杆保持水平平衡,需要在 D点
挂5个相同的钩码
D.为了保持杠杆在水平位置平衡,在D点施加
拉力的方向由①位置到②位置的过程中,所
需施加的拉力大小不变
B
同课章节目录