第一章 动量与动量守恒定律 提升课·专题集训 人船模型 高中物理教科版选择性必修第一册(42页PPT)
文档属性
| 名称 | 第一章 动量与动量守恒定律 提升课·专题集训 人船模型 高中物理教科版选择性必修第一册(42页PPT) |
|
|
| 格式 | pptx | ||
| 文件大小 | 3.0MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 教科版(2019) | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-06-15 00:00:00 | ||
图片预览
文档简介
(共42张PPT)
第一章 动量与动量守恒定律
提升课·专题集训
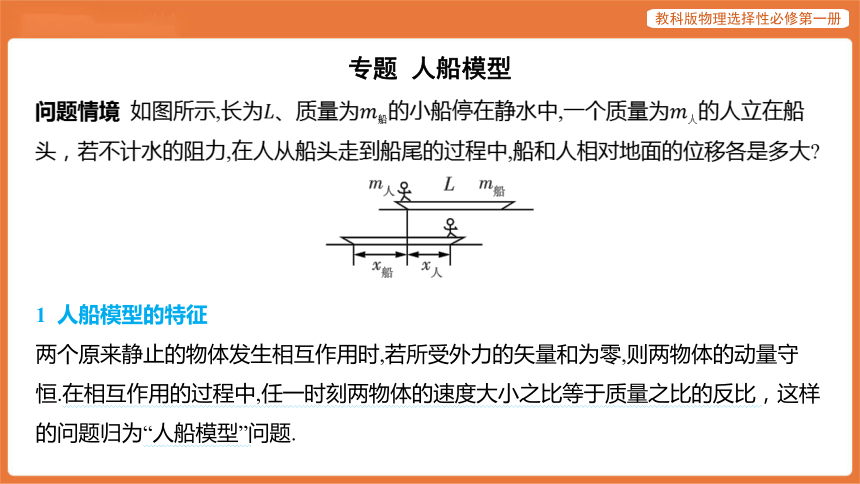
专题 人船模型
问题情境 如图所示,长为、质量为的小船停在静水中,一个质量为 的人立在船
头,若不计水的阻力,在人从船头走到船尾的过程中,船和人相对地面的位移各是多大
1 人船模型的特征
两个原来静止的物体发生相互作用时,若所受外力的矢量和为零,则两物体的动量守
恒.在相互作用的过程中,任一时刻两物体的速度大小之比等于质量之比的反比,这样
的问题归为“人船模型”问题.
. .
. .
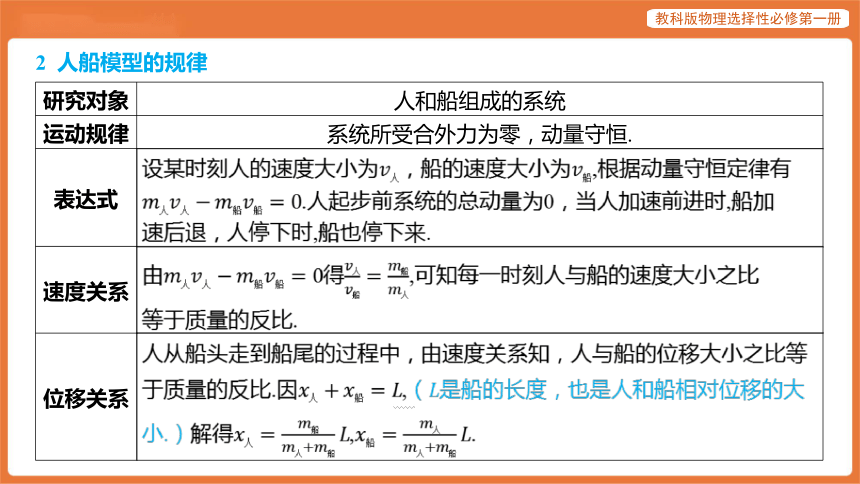
2 人船模型的规律
研究对象 人和船组成的系统
运动规律 系统所受合外力为零,动量守恒.
表达式
速度关系
位移关系
. .
特别提醒(1)“人船模型”问题中,两物体的运动特点是“人”走“船”行、“人”停“船”
停、“人”快“船”快、“人”慢“船”慢.
(2)、 的大小与人运动的时间和运动状态无关.
(3)当系统的动量守恒时,任意一段时间内的平均动量也守恒.
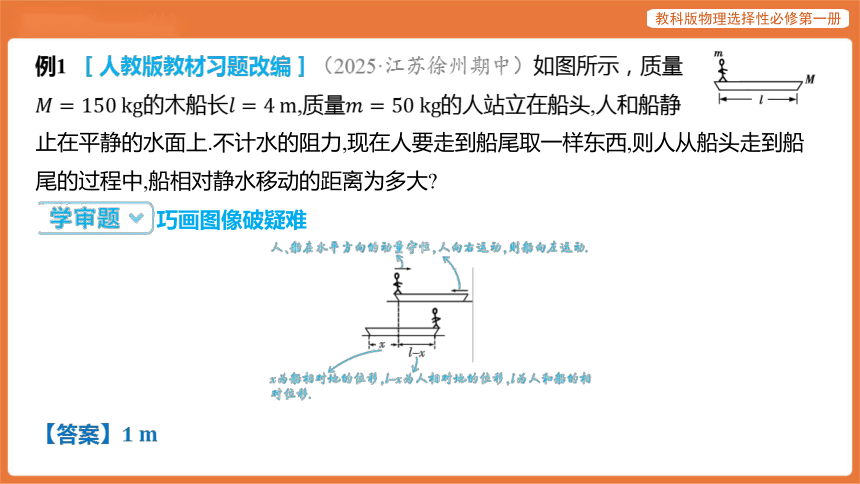
例1 [人教版教材习题改编](2025·江苏徐州期中)如图所示,质量
的木船长,质量 的人站立在船头,人和船静
巧画图像破疑难
【答案】
止在平静的水面上.不计水的阻力,现在人要走到船尾取一样东西,则人从船头走到船
尾的过程中,船相对静水移动的距离为多大
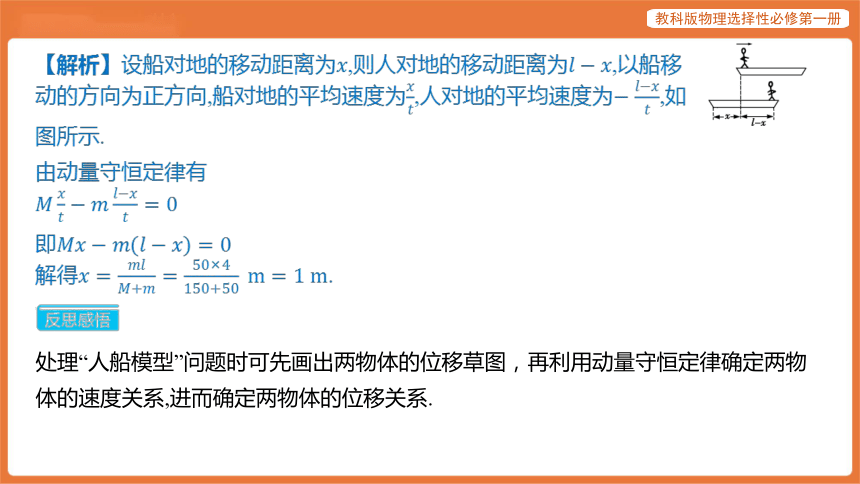
【解析】设船对地的移动距离为,则人对地的移动距离为 ,以船移
动的方向为正方向,船对地的平均速度为,人对地的平均速度为 ,如
处理“人船模型”问题时可先画出两物体的位移草图,再利用动量守恒定律确定两物
体的速度关系,进而确定两物体的位移关系.
图所示.
由动量守恒定律有
即
解得 .
3 人船模型的应用
(1)水平方向上类似“人船模型”的问题
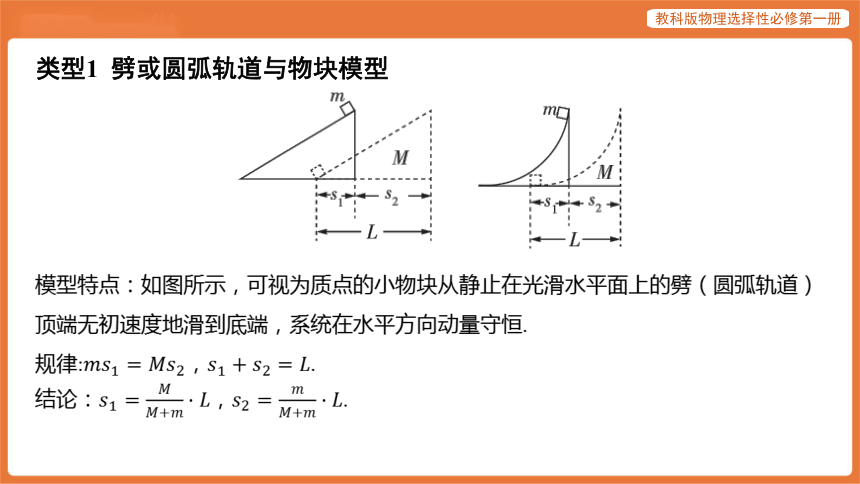
类型1 劈或圆弧轨道与物块模型
模型特点:如图所示,可视为质点的小物块从静止在光滑水平面上的劈(圆弧轨道)
顶端无初速度地滑到底端,系统在水平方向动量守恒.
规律:, .
结论:, .
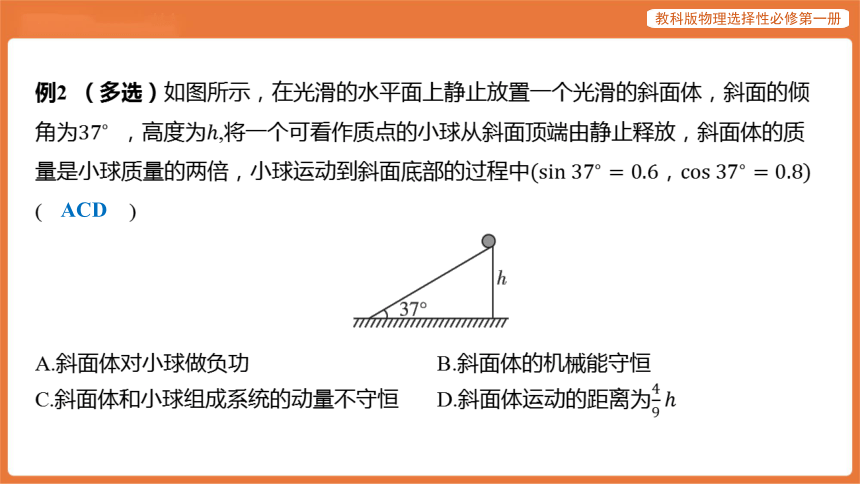
例2 (多选)如图所示,在光滑的水平面上静止放置一个光滑的斜面体,斜面的倾
角为 ,高度为 ,将一个可看作质点的小球从斜面顶端由静止释放,斜面体的质
量是小球质量的两倍,小球运动到斜面底部的过程中,
( )
ACD
A.斜面体对小球做负功 B.斜面体的机械能守恒
C.斜面体和小球组成系统的动量不守恒 D.斜面体运动的距离为
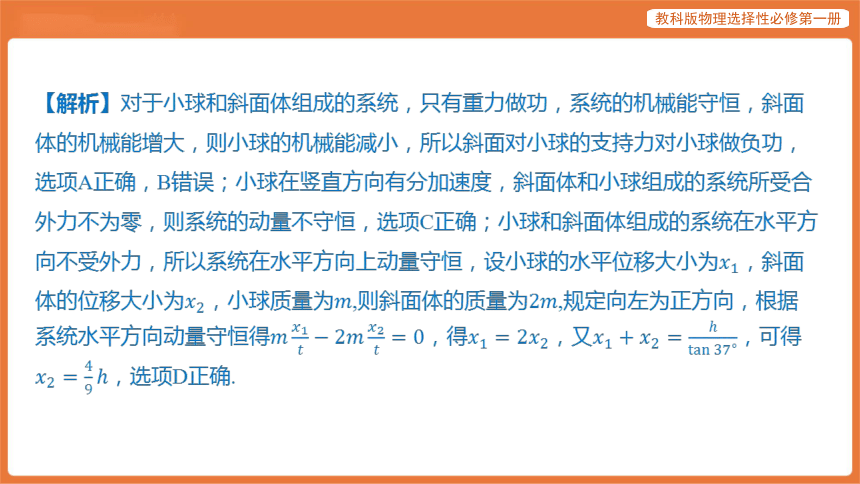
【解析】对于小球和斜面体组成的系统,只有重力做功,系统的机械能守恒,斜面
体的机械能增大,则小球的机械能减小,所以斜面对小球的支持力对小球做负功,
选项A正确,B错误;小球在竖直方向有分加速度,斜面体和小球组成的系统所受合
外力不为零,则系统的动量不守恒,选项C正确;小球和斜面体组成的系统在水平方
向不受外力,所以系统在水平方向上动量守恒,设小球的水平位移大小为 ,斜面
体的位移大小为,小球质量为,则斜面体的质量为 ,规定向左为正方向,根据
系统水平方向动量守恒得,得,又 ,可得
,选项D正确.
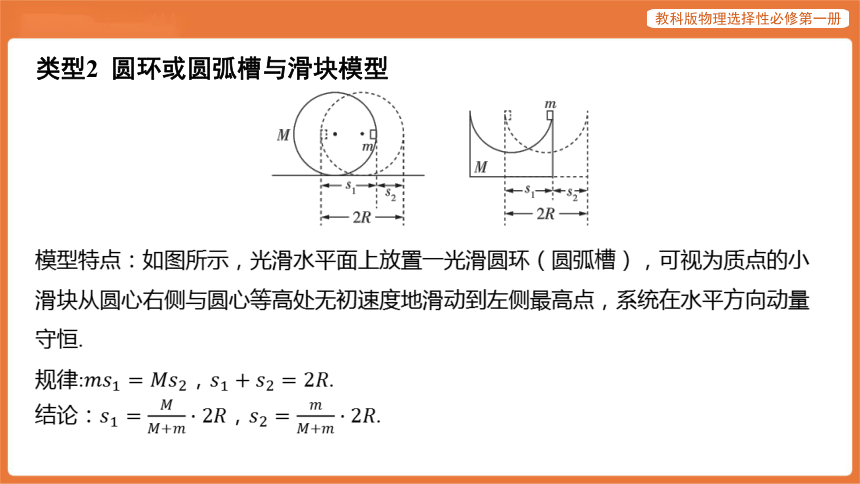
类型2 圆环或圆弧槽与滑块模型
模型特点:如图所示,光滑水平面上放置一光滑圆环(圆弧槽),可视为质点的小
滑块从圆心右侧与圆心等高处无初速度地滑动到左侧最高点,系统在水平方向动量
守恒.
规律:, .
结论:, .
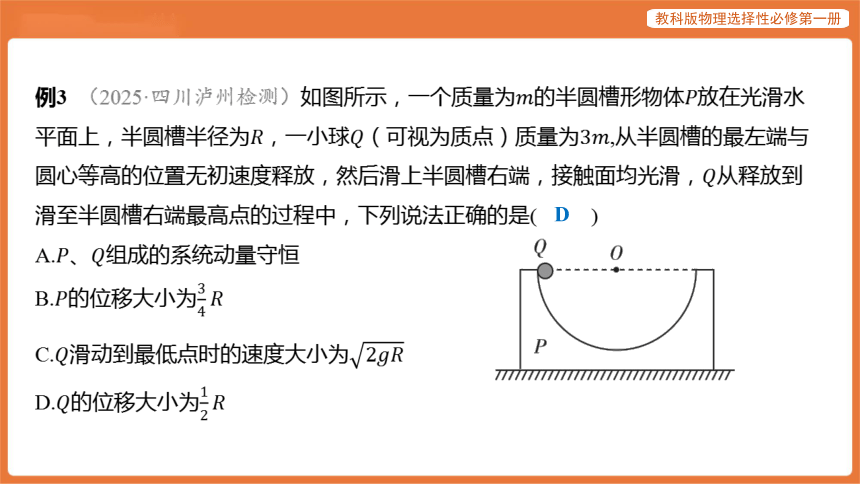
例3 (2025·四川泸州检测)如图所示,一个质量为的半圆槽形物体 放在光滑水
平面上,半圆槽半径为,一小球(可视为质点)质量为 ,从半圆槽的最左端与
圆心等高的位置无初速度释放,然后滑上半圆槽右端,接触面均光滑, 从释放到
滑至半圆槽右端最高点的过程中,下列说法正确的是( )
D
A.、 组成的系统动量守恒
B.的位移大小为
C.滑动到最低点时的速度大小为
D.的位移大小为
【解析】
类型3 小车或滑块与小球模型
模型特点:如图所示,光滑的水平面(杆)
上放置(套上)小车(滑块),系在小车
(滑块)上的可视为质点的小球由静止从
与 点等高处释放,不计空气阻力,小球
运动到最低点的过程中,系统水平方向动
量守恒.
规律:, .
结论:, .
例4 (2025·黑龙江哈尔滨九中期中,多选)如图所示,一质
量为 的小车静止在光滑水平面上,车上固定一个竖直支架,
轻绳一端固定在支架上,另一端连接一质量为 的小球,轻
绳长为 ,将小球向右拉至轻绳水平后,从静止释放小球,不
计空气阻力,则在接下来的运动中( )
CD
A.小球和小车组成的系统满足动量守恒
B.小球每次运动到最低点时,小车速度都水平向右
C.小球能向左摆到原高度
D.小车向右移动的最大距离为
【解析】根据题意可知,系统在水平方向所受合力为零,在竖直方向所受合力不为
零,故系统在水平方向动量守恒,而系统总动量不守恒,故A错误;根据系统水平
方向动量守恒及系统机械能守恒可知,小球摆到左侧最高点时系统的速度为零,则
小球仍能向左摆到原高度,故C正确;小球向左摆到原高度后,速度为零,然后再向
右摆动,向右摆到最低点时,根据水平方向动量守恒知,此时小车速度方向向左,
故B错误;分析可知,当小球向左摆到最大高度时小车向右的位移最大,此时小球相
对于小车的位移最大,大小为 ,系统水平方向动量守恒,设小球在水平方向上的
平均速度大小为,小车在水平方向上的平均速度大小为 ,由动量守恒定律有
,再结合运动学公式有,又有 ,联立解得
小车向右移动的最大距离为 ,故D正确.
类型4 棒与双球模型
模型特点:如图所示,可视为质点的两个小球固定
于轻杆的两端并竖直放置在光滑水平地面上,某时
刻给质量为 的小球一个微小扰动,该小球落到地
面的过程中,系统水平方向动量守恒.
规律:, .
结论:, .
例5 如图所示,质量分别为和的、两个可视为质点的小球用长为
的刚性轻杆连接,竖直静止地立于光滑的水平地面上,由于微小扰动,轻杆开始自
由倒下.已知整个过程中球不离开地面,重力加速度 ,不计空气阻力.在
球 落地过程中,求:
(1)球落地时速度大小 (可保留根号);
【答案】
【解析】落地时,、在水平方向共速,设水平速度大小为 ,落地过程系统水平
方向动量守恒,则有
可得
落地过程中,由机械能守恒定律有
解得 .
(2)球的位移大小 ;
【答案】
【解析】、 组成的系统在水平方向动量守恒,结合运动学知识,有
如图所示,设的水平速度为,竖直速度为 ,因
、组成的系统在水平方向动量守恒,则
A、 沿杆方向速度相等,则
系统机械能守恒,则
联立各式解得 .
(3)当轻杆与水平地面夹角为 时,球的速度大小 .
【答案】
(2)竖直方向上类似“人船模型”的问题
模型特点:如图,无风环境中,气球质量为,下端有一条不计质量的软绳,质量为
的人沿绳下滑,气球所受浮力等于气球和人的总重力,系统动量守恒.
规律:, .
结论:, .
例6 (多选)如图所示,载有物资的热气球的总质量为,静止于距离水平地面 的
高处.现将质量为的物资以相对地面竖直向下的速度 投出,物资落地时与热气球
的距离为.设整个过程中热气球所受浮力不变,重力加速度为 ,不计空气阻力,忽
略物资受到的浮力.下列说法正确的是( )
AD
A.物资落地前,热气球与其组成的系统动量守恒
B.投出物资后,热气球匀速上升
C.物资落地时,热气球上升的高度为
D.
【解析】物资抛出之前,物资和热气球组成的系统所受合外力为零,物资抛出后,
热气球和物资所受合外力不变,则系统所受的合外力仍为零,因此物资落地前,热
气球与被投出的物资组成的系统动量守恒,故A正确;投出物资后,热气球受到的
浮力大于重力,热气球所受合外力向上,则热气球向上做匀加速直线运动,故B错误;
设物资落地时,热气球上升的高度为 ,则对物资和热气球组成的系统,取竖直向上
为正方向,由动量守恒定律可得,解得 ,则
,故C错误,D正确.
强化集训
针对训练
1.如图所示,质量为的平板车放置在光滑水平面上,一辆质量为 的电动玩
具车放在平板车上,其前端距离平板车左端 .现启动电动玩具车,则( )
D
A.玩具车开始向左运动后,平板车仍然静止
B.玩具车突然不动时,平板车仍然向右运动
C.玩具车运动得越快,平板车运动得越慢
D.玩具车前端运动到平板车左端时,平板车在水平面上移动
【解析】平板车和玩具车组成的系统动量守恒,根据动量守恒定律,玩具车开始向
左运动后,平板车向右运动,A错误;根据动量守恒定律,玩具车突然不动时,平
板车也立即停止运动,B错误;根据动量守恒定律,玩具车运动得越快,平板车运动
得越快,C错误;根据动量守恒定律有 ,玩具车前端运动到平板
车左端时,有,解得, ,故玩具车前端运动
到平板车左端时,平板车在水平面上移动 ,D正确.
2.(2025·山东泰安期中)如图,在光滑水平面上有一辆质量为、长度为 的平板
车,车的两端分别站着可视为质点的人和,的质量为,的质量为 .最初
人和车都处于静止状态.现让两人同时由静止开始相向而行,并同时到达对方开始时
的位置,此时平板车的位置在原来的左侧,则平板车移动的位移为( )
D
A. B. C. D.
【解析】两人与车组成的系统动量守恒,开始时系统动量为零,设平板车移动的位
移为,运动时间为 ,取向左为正方向,由动量守恒定律有
,解得 ,故选D.
3.(2025·清华大学附属中学朝阳学校尖子生测试,多选)在光滑水平面上放有一质
量为的小车,一质量为的小球用长为 的轻质细线悬挂于小车顶端.现从图中位
置(细线伸直且水平)同时由静止释放小球和小车,设小球到达最低点时的速度为 .
从开始释放到小球到达最低点的过程中,细线对小球做的功为 .从释放开始小车离
开初位置的最大距离为,重力加速度为 ,则下列说法正确的有( )
BC
A. B. C. D.
【解析】从开始释放到小球到达最低点的过程中,小球与小车组成的系统水平方向
动量守恒,由动量守恒定律和能量守恒定律得 ,
,解得 ,故A错误,B正确;从开始释放到小球到
达最低点的过程中,对小球,由动能定理得,解得 ,
故C正确;从释放开始小车离开初位置的最大距离发生在小球摆至最高点时,此时小
球与车的速度均为零,由能量守恒知小球回到原高度,由人船模型规律得
,,解得 ,故D错误.
4.(2025·山东济宁一中月考)
如图所示,在一次打靶训练中,起初人和车一起静止在光滑水平面上,人和靶分别
在车的两端,车、人、枪、靶总质量为(不含子弹),每颗子弹质量为 ,一共
有发.枪与靶之间距离为 ,子弹击中靶后会嵌入其中,射击时总是等上一发击中后
再打下一发,不计空气阻力.则以下说法正确的是( )
C
A.射击过程中,车向左移动
B.射击完成后,车会向右做匀速运动
C.每发射一颗子弹,车移动的距离为
D.全部子弹打完后,车移动的总距离为
【解析】水平面光滑,车、人、枪、靶和子弹组成的系统所受外力的合力为零,系
统动量守恒,起初人和车一起静止,射击过程中,子弹向左运动,人和车向右移动,
射击完成后,车仍然静止,故A、B错误;设子弹出枪口的速度为 ,车向右运动的
速度为 ,以向左为正方向,第一发子弹刚射出枪口时,根据动量守恒定律有
,则有 ,子弹向左运动的
同时,车向右运动,则有 ,在每一发子弹射击过程中,小车所移动的距
离,联立解得,故C正确;结合上述分析可知, 发子弹射击完毕后,
小车移动的总距离 ,故D错误.
5.(2025·山东菏泽期中)如图所示,质量 的木船静止在湖岸附近的水面
上,船面可看作水平面,并且比湖岸高出.在船尾处有一质量 的
铁块,铁块将一端固定的轻弹簧压缩后再用细线拴住,铁块与弹簧不拴接,此时铁
块到船头的距离,船头到湖岸的水平距离 .将细线烧断后铁块恰好
能落到湖岸上,忽略船在水中运动时受到水的阻力以及其他一切摩擦力,重力加速
度 .求:
(1)铁块脱离木船时的瞬时速度大小 ;
【答案】
【解析】烧断细线后,木船和铁块组成的系统在水平方向所受合外力为零,故系统
在水平方向动量守恒,(【点关键】轻弹簧的质量不计,可将轻弹簧与木船看作整
体,弹簧的弹力为系统的内力.由平均动量守恒得 )
有
又
联立解得,
铁块离开木船后做平抛运动,在水平方向有
在竖直方向有
解得, .
. .
. .
(2)木船最终的速度大小 ;
【答案】
【解析】铁块与木船相互作用时,由动量守恒得
解得 .
(3)弹簧释放的弹性势能 .
【答案】
【解析】由机械能守恒定律得
解得 .
6.(2025·山东省实验中学诊断考试)如图所示,质量 的匀质凹槽放在光滑
的水平地面上,凹槽内有一光滑曲面轨道,点是凹槽左右侧面最高点的中点, 点
到凹槽右侧的距离,点到凹槽最低点的高度 .一个质量
的小球(可看成质点),初始时刻从凹槽的右端点由静止开始下滑,整
个过程凹槽不翻转,取重力加速度大小 .求:
(1)小球第一次运动到凹槽最低点时的速度大小;
【答案】
【解析】小球和凹槽组成的系统水平方向动量守恒,设小球第一次运动到凹槽最低
点的速度大小为,此时凹槽的速度大小为 ,取向左为正方向,有
该过程中系统机械能守恒,有
解得 .
(2)整个运动过程中,凹槽相对于初始时刻运动的最大位移.
【答案】
【解析】因小球和凹槽组成的系统在任何时候水平方向都动量守恒,即有
两边同时乘可得
其中为小球的位移大小, 为凹槽的位移大小.整个运动过程中,当小球运动到凹
槽左侧最高点时,凹槽相对于初始时刻有最大位移,此时
联立解得 .
高考链接
7.(2024·河北卷节选)如图,三块厚度相同、质量相等的木板、、 (上表面均
粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于 木板左端.已知三
块木板质量均为,木板长度为,机器人质量为,重力加速度 取
,忽略空气阻力.
(1)机器人从木板左端走到木板右端时,求、 木板间的水平距离.
【答案】
【解析】机器人从木板左端走到木板右端的过程中,机器人与 木板组成的系统
动量守恒,设机器人质量为,三块木板质量均为,机器人从木板左端走到 木
板右端时,机器人、木板运动的位移大小分别为、 ,取向右为正方向,则有
同时有
解得、木板间的水平距离 .
(2)机器人走到木板右端相对木板静止后,以做功最少的方式从木板右端跳到 木
板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值.
【答案】
【解析】设机器人起跳的速度大小为,方向与水平方向的夹角为 ,从 木板右端
跳到木板左端时间为 ,根据斜抛运动规律得
联立解得
机器人跳离的过程,机器人和 木板组成的系统水平方向动量守恒,有
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时, 取最小值,代入数值得此
时 .
第一章 动量与动量守恒定律
提升课·专题集训
专题 人船模型
问题情境 如图所示,长为、质量为的小船停在静水中,一个质量为 的人立在船
头,若不计水的阻力,在人从船头走到船尾的过程中,船和人相对地面的位移各是多大
1 人船模型的特征
两个原来静止的物体发生相互作用时,若所受外力的矢量和为零,则两物体的动量守
恒.在相互作用的过程中,任一时刻两物体的速度大小之比等于质量之比的反比,这样
的问题归为“人船模型”问题.
. .
. .
2 人船模型的规律
研究对象 人和船组成的系统
运动规律 系统所受合外力为零,动量守恒.
表达式
速度关系
位移关系
. .
特别提醒(1)“人船模型”问题中,两物体的运动特点是“人”走“船”行、“人”停“船”
停、“人”快“船”快、“人”慢“船”慢.
(2)、 的大小与人运动的时间和运动状态无关.
(3)当系统的动量守恒时,任意一段时间内的平均动量也守恒.
例1 [人教版教材习题改编](2025·江苏徐州期中)如图所示,质量
的木船长,质量 的人站立在船头,人和船静
巧画图像破疑难
【答案】
止在平静的水面上.不计水的阻力,现在人要走到船尾取一样东西,则人从船头走到船
尾的过程中,船相对静水移动的距离为多大
【解析】设船对地的移动距离为,则人对地的移动距离为 ,以船移
动的方向为正方向,船对地的平均速度为,人对地的平均速度为 ,如
处理“人船模型”问题时可先画出两物体的位移草图,再利用动量守恒定律确定两物
体的速度关系,进而确定两物体的位移关系.
图所示.
由动量守恒定律有
即
解得 .
3 人船模型的应用
(1)水平方向上类似“人船模型”的问题
类型1 劈或圆弧轨道与物块模型
模型特点:如图所示,可视为质点的小物块从静止在光滑水平面上的劈(圆弧轨道)
顶端无初速度地滑到底端,系统在水平方向动量守恒.
规律:, .
结论:, .
例2 (多选)如图所示,在光滑的水平面上静止放置一个光滑的斜面体,斜面的倾
角为 ,高度为 ,将一个可看作质点的小球从斜面顶端由静止释放,斜面体的质
量是小球质量的两倍,小球运动到斜面底部的过程中,
( )
ACD
A.斜面体对小球做负功 B.斜面体的机械能守恒
C.斜面体和小球组成系统的动量不守恒 D.斜面体运动的距离为
【解析】对于小球和斜面体组成的系统,只有重力做功,系统的机械能守恒,斜面
体的机械能增大,则小球的机械能减小,所以斜面对小球的支持力对小球做负功,
选项A正确,B错误;小球在竖直方向有分加速度,斜面体和小球组成的系统所受合
外力不为零,则系统的动量不守恒,选项C正确;小球和斜面体组成的系统在水平方
向不受外力,所以系统在水平方向上动量守恒,设小球的水平位移大小为 ,斜面
体的位移大小为,小球质量为,则斜面体的质量为 ,规定向左为正方向,根据
系统水平方向动量守恒得,得,又 ,可得
,选项D正确.
类型2 圆环或圆弧槽与滑块模型
模型特点:如图所示,光滑水平面上放置一光滑圆环(圆弧槽),可视为质点的小
滑块从圆心右侧与圆心等高处无初速度地滑动到左侧最高点,系统在水平方向动量
守恒.
规律:, .
结论:, .
例3 (2025·四川泸州检测)如图所示,一个质量为的半圆槽形物体 放在光滑水
平面上,半圆槽半径为,一小球(可视为质点)质量为 ,从半圆槽的最左端与
圆心等高的位置无初速度释放,然后滑上半圆槽右端,接触面均光滑, 从释放到
滑至半圆槽右端最高点的过程中,下列说法正确的是( )
D
A.、 组成的系统动量守恒
B.的位移大小为
C.滑动到最低点时的速度大小为
D.的位移大小为
【解析】
类型3 小车或滑块与小球模型
模型特点:如图所示,光滑的水平面(杆)
上放置(套上)小车(滑块),系在小车
(滑块)上的可视为质点的小球由静止从
与 点等高处释放,不计空气阻力,小球
运动到最低点的过程中,系统水平方向动
量守恒.
规律:, .
结论:, .
例4 (2025·黑龙江哈尔滨九中期中,多选)如图所示,一质
量为 的小车静止在光滑水平面上,车上固定一个竖直支架,
轻绳一端固定在支架上,另一端连接一质量为 的小球,轻
绳长为 ,将小球向右拉至轻绳水平后,从静止释放小球,不
计空气阻力,则在接下来的运动中( )
CD
A.小球和小车组成的系统满足动量守恒
B.小球每次运动到最低点时,小车速度都水平向右
C.小球能向左摆到原高度
D.小车向右移动的最大距离为
【解析】根据题意可知,系统在水平方向所受合力为零,在竖直方向所受合力不为
零,故系统在水平方向动量守恒,而系统总动量不守恒,故A错误;根据系统水平
方向动量守恒及系统机械能守恒可知,小球摆到左侧最高点时系统的速度为零,则
小球仍能向左摆到原高度,故C正确;小球向左摆到原高度后,速度为零,然后再向
右摆动,向右摆到最低点时,根据水平方向动量守恒知,此时小车速度方向向左,
故B错误;分析可知,当小球向左摆到最大高度时小车向右的位移最大,此时小球相
对于小车的位移最大,大小为 ,系统水平方向动量守恒,设小球在水平方向上的
平均速度大小为,小车在水平方向上的平均速度大小为 ,由动量守恒定律有
,再结合运动学公式有,又有 ,联立解得
小车向右移动的最大距离为 ,故D正确.
类型4 棒与双球模型
模型特点:如图所示,可视为质点的两个小球固定
于轻杆的两端并竖直放置在光滑水平地面上,某时
刻给质量为 的小球一个微小扰动,该小球落到地
面的过程中,系统水平方向动量守恒.
规律:, .
结论:, .
例5 如图所示,质量分别为和的、两个可视为质点的小球用长为
的刚性轻杆连接,竖直静止地立于光滑的水平地面上,由于微小扰动,轻杆开始自
由倒下.已知整个过程中球不离开地面,重力加速度 ,不计空气阻力.在
球 落地过程中,求:
(1)球落地时速度大小 (可保留根号);
【答案】
【解析】落地时,、在水平方向共速,设水平速度大小为 ,落地过程系统水平
方向动量守恒,则有
可得
落地过程中,由机械能守恒定律有
解得 .
(2)球的位移大小 ;
【答案】
【解析】、 组成的系统在水平方向动量守恒,结合运动学知识,有
如图所示,设的水平速度为,竖直速度为 ,因
、组成的系统在水平方向动量守恒,则
A、 沿杆方向速度相等,则
系统机械能守恒,则
联立各式解得 .
(3)当轻杆与水平地面夹角为 时,球的速度大小 .
【答案】
(2)竖直方向上类似“人船模型”的问题
模型特点:如图,无风环境中,气球质量为,下端有一条不计质量的软绳,质量为
的人沿绳下滑,气球所受浮力等于气球和人的总重力,系统动量守恒.
规律:, .
结论:, .
例6 (多选)如图所示,载有物资的热气球的总质量为,静止于距离水平地面 的
高处.现将质量为的物资以相对地面竖直向下的速度 投出,物资落地时与热气球
的距离为.设整个过程中热气球所受浮力不变,重力加速度为 ,不计空气阻力,忽
略物资受到的浮力.下列说法正确的是( )
AD
A.物资落地前,热气球与其组成的系统动量守恒
B.投出物资后,热气球匀速上升
C.物资落地时,热气球上升的高度为
D.
【解析】物资抛出之前,物资和热气球组成的系统所受合外力为零,物资抛出后,
热气球和物资所受合外力不变,则系统所受的合外力仍为零,因此物资落地前,热
气球与被投出的物资组成的系统动量守恒,故A正确;投出物资后,热气球受到的
浮力大于重力,热气球所受合外力向上,则热气球向上做匀加速直线运动,故B错误;
设物资落地时,热气球上升的高度为 ,则对物资和热气球组成的系统,取竖直向上
为正方向,由动量守恒定律可得,解得 ,则
,故C错误,D正确.
强化集训
针对训练
1.如图所示,质量为的平板车放置在光滑水平面上,一辆质量为 的电动玩
具车放在平板车上,其前端距离平板车左端 .现启动电动玩具车,则( )
D
A.玩具车开始向左运动后,平板车仍然静止
B.玩具车突然不动时,平板车仍然向右运动
C.玩具车运动得越快,平板车运动得越慢
D.玩具车前端运动到平板车左端时,平板车在水平面上移动
【解析】平板车和玩具车组成的系统动量守恒,根据动量守恒定律,玩具车开始向
左运动后,平板车向右运动,A错误;根据动量守恒定律,玩具车突然不动时,平
板车也立即停止运动,B错误;根据动量守恒定律,玩具车运动得越快,平板车运动
得越快,C错误;根据动量守恒定律有 ,玩具车前端运动到平板
车左端时,有,解得, ,故玩具车前端运动
到平板车左端时,平板车在水平面上移动 ,D正确.
2.(2025·山东泰安期中)如图,在光滑水平面上有一辆质量为、长度为 的平板
车,车的两端分别站着可视为质点的人和,的质量为,的质量为 .最初
人和车都处于静止状态.现让两人同时由静止开始相向而行,并同时到达对方开始时
的位置,此时平板车的位置在原来的左侧,则平板车移动的位移为( )
D
A. B. C. D.
【解析】两人与车组成的系统动量守恒,开始时系统动量为零,设平板车移动的位
移为,运动时间为 ,取向左为正方向,由动量守恒定律有
,解得 ,故选D.
3.(2025·清华大学附属中学朝阳学校尖子生测试,多选)在光滑水平面上放有一质
量为的小车,一质量为的小球用长为 的轻质细线悬挂于小车顶端.现从图中位
置(细线伸直且水平)同时由静止释放小球和小车,设小球到达最低点时的速度为 .
从开始释放到小球到达最低点的过程中,细线对小球做的功为 .从释放开始小车离
开初位置的最大距离为,重力加速度为 ,则下列说法正确的有( )
BC
A. B. C. D.
【解析】从开始释放到小球到达最低点的过程中,小球与小车组成的系统水平方向
动量守恒,由动量守恒定律和能量守恒定律得 ,
,解得 ,故A错误,B正确;从开始释放到小球到
达最低点的过程中,对小球,由动能定理得,解得 ,
故C正确;从释放开始小车离开初位置的最大距离发生在小球摆至最高点时,此时小
球与车的速度均为零,由能量守恒知小球回到原高度,由人船模型规律得
,,解得 ,故D错误.
4.(2025·山东济宁一中月考)
如图所示,在一次打靶训练中,起初人和车一起静止在光滑水平面上,人和靶分别
在车的两端,车、人、枪、靶总质量为(不含子弹),每颗子弹质量为 ,一共
有发.枪与靶之间距离为 ,子弹击中靶后会嵌入其中,射击时总是等上一发击中后
再打下一发,不计空气阻力.则以下说法正确的是( )
C
A.射击过程中,车向左移动
B.射击完成后,车会向右做匀速运动
C.每发射一颗子弹,车移动的距离为
D.全部子弹打完后,车移动的总距离为
【解析】水平面光滑,车、人、枪、靶和子弹组成的系统所受外力的合力为零,系
统动量守恒,起初人和车一起静止,射击过程中,子弹向左运动,人和车向右移动,
射击完成后,车仍然静止,故A、B错误;设子弹出枪口的速度为 ,车向右运动的
速度为 ,以向左为正方向,第一发子弹刚射出枪口时,根据动量守恒定律有
,则有 ,子弹向左运动的
同时,车向右运动,则有 ,在每一发子弹射击过程中,小车所移动的距
离,联立解得,故C正确;结合上述分析可知, 发子弹射击完毕后,
小车移动的总距离 ,故D错误.
5.(2025·山东菏泽期中)如图所示,质量 的木船静止在湖岸附近的水面
上,船面可看作水平面,并且比湖岸高出.在船尾处有一质量 的
铁块,铁块将一端固定的轻弹簧压缩后再用细线拴住,铁块与弹簧不拴接,此时铁
块到船头的距离,船头到湖岸的水平距离 .将细线烧断后铁块恰好
能落到湖岸上,忽略船在水中运动时受到水的阻力以及其他一切摩擦力,重力加速
度 .求:
(1)铁块脱离木船时的瞬时速度大小 ;
【答案】
【解析】烧断细线后,木船和铁块组成的系统在水平方向所受合外力为零,故系统
在水平方向动量守恒,(【点关键】轻弹簧的质量不计,可将轻弹簧与木船看作整
体,弹簧的弹力为系统的内力.由平均动量守恒得 )
有
又
联立解得,
铁块离开木船后做平抛运动,在水平方向有
在竖直方向有
解得, .
. .
. .
(2)木船最终的速度大小 ;
【答案】
【解析】铁块与木船相互作用时,由动量守恒得
解得 .
(3)弹簧释放的弹性势能 .
【答案】
【解析】由机械能守恒定律得
解得 .
6.(2025·山东省实验中学诊断考试)如图所示,质量 的匀质凹槽放在光滑
的水平地面上,凹槽内有一光滑曲面轨道,点是凹槽左右侧面最高点的中点, 点
到凹槽右侧的距离,点到凹槽最低点的高度 .一个质量
的小球(可看成质点),初始时刻从凹槽的右端点由静止开始下滑,整
个过程凹槽不翻转,取重力加速度大小 .求:
(1)小球第一次运动到凹槽最低点时的速度大小;
【答案】
【解析】小球和凹槽组成的系统水平方向动量守恒,设小球第一次运动到凹槽最低
点的速度大小为,此时凹槽的速度大小为 ,取向左为正方向,有
该过程中系统机械能守恒,有
解得 .
(2)整个运动过程中,凹槽相对于初始时刻运动的最大位移.
【答案】
【解析】因小球和凹槽组成的系统在任何时候水平方向都动量守恒,即有
两边同时乘可得
其中为小球的位移大小, 为凹槽的位移大小.整个运动过程中,当小球运动到凹
槽左侧最高点时,凹槽相对于初始时刻有最大位移,此时
联立解得 .
高考链接
7.(2024·河北卷节选)如图,三块厚度相同、质量相等的木板、、 (上表面均
粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于 木板左端.已知三
块木板质量均为,木板长度为,机器人质量为,重力加速度 取
,忽略空气阻力.
(1)机器人从木板左端走到木板右端时,求、 木板间的水平距离.
【答案】
【解析】机器人从木板左端走到木板右端的过程中,机器人与 木板组成的系统
动量守恒,设机器人质量为,三块木板质量均为,机器人从木板左端走到 木
板右端时,机器人、木板运动的位移大小分别为、 ,取向右为正方向,则有
同时有
解得、木板间的水平距离 .
(2)机器人走到木板右端相对木板静止后,以做功最少的方式从木板右端跳到 木
板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值.
【答案】
【解析】设机器人起跳的速度大小为,方向与水平方向的夹角为 ,从 木板右端
跳到木板左端时间为 ,根据斜抛运动规律得
联立解得
机器人跳离的过程,机器人和 木板组成的系统水平方向动量守恒,有
根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当时,即时, 取最小值,代入数值得此
时 .
同课章节目录