4.14 编程控制倒垃圾——小型系统控制 教学设计-2024-2025学年六年级上册《信息科技》(安徽版2024)
文档属性
| 名称 | 4.14 编程控制倒垃圾——小型系统控制 教学设计-2024-2025学年六年级上册《信息科技》(安徽版2024) |
|
|
| 格式 | doc | ||
| 文件大小 | 1.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2025-07-02 00:00:00 | ||
图片预览
文档简介
4.14 编程控制倒垃圾——小型系统控制
教学设计
一、学习内容
本课是“制作智能垃圾桶”最后一个子项目,通过编程控制垃圾桶的自动开关盖功能。在此环节,对已搭建的硬件原型,学生需要确认控制流程,确定控制参数,编写控制程序,并进行测试和调整。通过这个子项目,学生的逻辑思维、创新能力和解决复杂问题的能力将得到显著提升。
二、学习基础
通过前两课的智能垃圾桶的设计与硬件搭建,学生对此项目有了一定的了解,同时具备基本的逻辑思维能力和动手操作能力。小组合作中也在不断提高参与度和协作能力。在编程控制方面,能够理解并绘制简单的流程图,能够根据流程图编写出相应的程序。这些知识和技能的储备将为学生顺利完成编程控制智能垃圾桶的任务打下坚实的基础。
三、问题梳理
1.素养问题
如何鼓励创新思维,以解决超声波垃圾桶项目中可能遇到的技术难题?
2.项目问题
如何确保超声波垃圾桶的性能稳定可靠,满足预期的使用标准?
四、学习目标与重难点
1.学习目标
(1)项目目标
学会编写控制程序,实现智能垃圾桶的“来人自动检测”与“自动开、关盖”。
(2)素养目标
能够通过编程实现常见传感器和执行器的控制。
2.学习重点和难点
(1)学习重点
选择合适的编程软件编写控制程序,实现垃圾桶的自动开关盖功能。
(2)学习难点
理解每条指令的作用,学会测试程序并进一步优化程序,实现合理的运行控制。
五、学习策略(学习规划、实验规划)
1.实验准备阶段
学生通过自主探索和团队合作的方式确认控制流程、确定控制参数,记录信号端口。
2.实验过程阶段
教师引导与师生协作,在此过程中,教师将扮演指导者的角色,帮助学生完成。软件连接以及程序编写与调试等任务。
3.实验结论阶段
小组讨论与记录,学生们将以小组为单位讨论实验结果,并共同填写实验记录单。
4.实验拓展阶段
知识延伸与创新思考,教师会向学生介绍更多关于开源硬件的知识,并鼓励他们思考如何利用这些智能设备来改善日常生活。
5.实验评价阶段
持续评估,整个学习过程中都包含对学生表现的过程性评价;同时,在每个环节结束时也进行总结性评价,确保每位同学都能从中受益并有所成长。
六、环境与资源
教学课件、配套课程资源包、开源硬件器材、必要的编程环境和工具等。
七、学习过程
(一)创设情境,明确目标
1.创设情境
在探索智能科技的奇妙旅程中,我们已共同完成了智能垃圾桶的设计与搭建。从创意初现到实物成型,每一步都满载着对智能生活的向往。如何实现智能垃圾桶从静态到动态,从简单到智能的华丽蜕变!我们将深入编程,用代码编织梦想,赋予智能垃圾桶真正的“智慧”。
2.明确实验目标
(1)通过编程控制传感器和执行器,实现垃圾桶盖的自动开关。
(2)思考如何利用智能硬件改善日常生活?
【设计意图:让学生明确实验的目标、方向和预期结果,从而指导整个实验过程。】
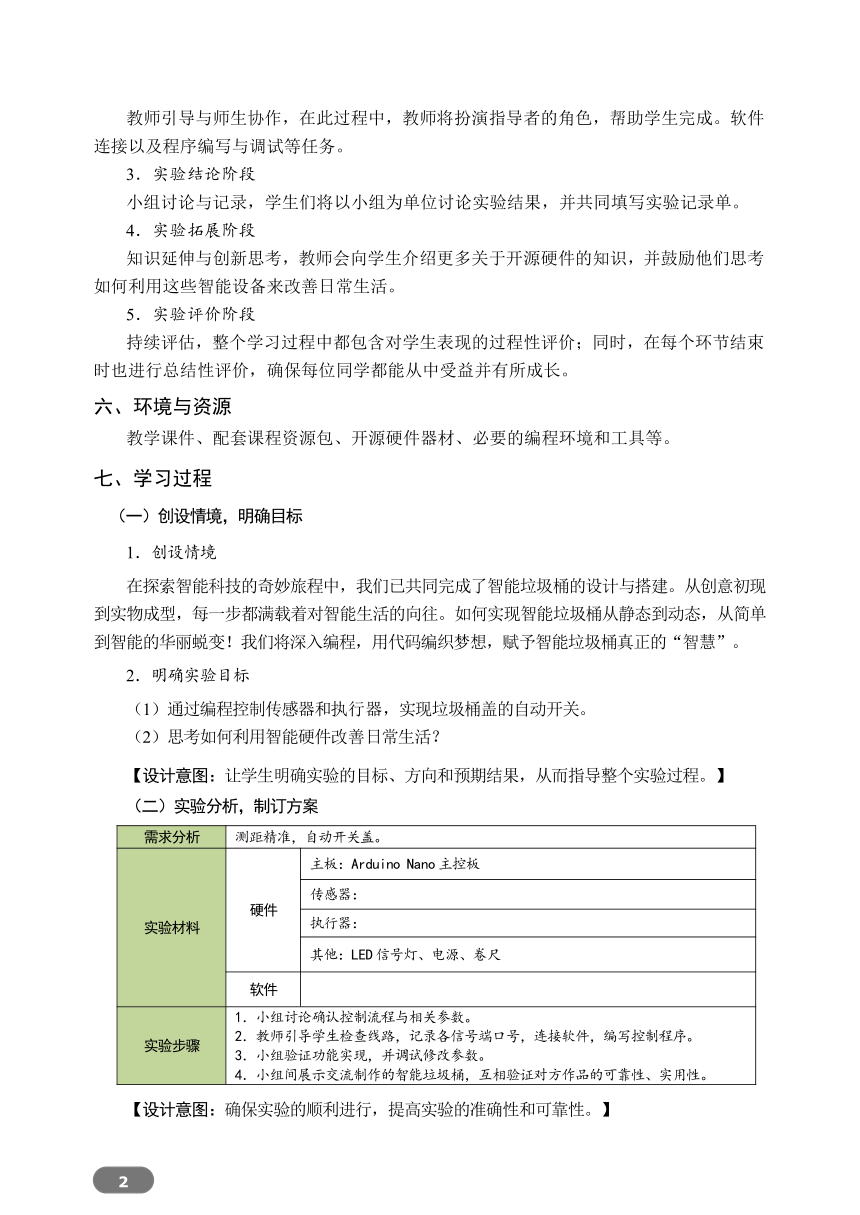
(二)实验分析,制订方案
需求分析 测距精准,自动开关盖。
实验材料 硬件 主板:Arduino Nano主控板
传感器:
执行器:
其他:LED信号灯、电源、卷尺
软件
实验步骤 1.小组讨论确认控制流程与相关参数。2.教师引导学生检查线路,记录各信号端口号,连接软件,编写控制程序。3.小组验证功能实现,并调试修改参数。4.小组间展示交流制作的智能垃圾桶,互相验证对方作品的可靠性、实用性。
【设计意图:确保实验的顺利进行,提高实验的准确性和可靠性。】
(三)实验准备
活动1:确认控制流程
学习评价 评价结果
能够结合设计方案和硬件搭建,完善智能垃圾桶编程控制流程图,明确各环节的位置,对控制流程有清晰的理解。 ☆☆☆
【设计意图:确认编程控制流程是为了确保程序能够按照预期的方式运行,实现既定的功能和目标。】
活动2:确定控制参数
编写智能垃圾桶“检测来人”“控制开关盖”功能的程序时,需要先确定相关的控制参数。
通过超声波传感器测量距离,当距离______设定值时,舵机转动开盖;当距离_____设定值时,舵机转动关盖。(填写“<=”或“>”)
学习评价 评价结果
在确定控制参数时,能与同学们积极讨论,合理填写检测来人的响应距离、开关盖时舵机转动的度数和放入垃圾的时长等参数。 ☆☆☆
【设计意图:确认编程控制参数它关系到程序是否能够成功实现预定目标,以及在实际运行中的表现。通过精心设计和不断优化,可以提高程序的质量和用户满意度。】
活动3:记录信号端口
小组合作,检查智能垃圾桶各部件线路连接,并记录各信号端口连接主板的端口号。
(实验注意事项:确保所有电线连接正确且牢固,避免松动导致接触不良。)
学习评价 评价结果
可以积极对实物模型进行检查,并记录下各个信号接口所对应的主板端口号。 ☆☆☆
【设计意图:检查线路是为了确保智能垃圾桶的正常运行,提高其稳定性和可靠性。】
(四)实验过程
活动1:编写控制程序(重点)
小组合作编写控制程序,师巡视指导。
有困惑的小组可以参考“微课2:编程控制智能垃圾桶1.mp4”或“图1:智能垃圾桶程序.png”。(实验注意事项:程序中的端口要与搭建时连接的端口对应。)
【设计意图:为了引导学生完成程序的编写,采用引导、微课、半成品形式来突破重点。】
学习评价 评价结果
在编写程序时,确保正确配置舵机、超声波传感器和数字LED发光模块的控制引脚,并合理设置延时等待时间以确保超声波传感器能够准确测量距离。 ☆☆☆
【设计意图:通过这些选择题,学生可以在思考的过程中逐渐理解程序的作用,并在选择正确答案的过程中巩固所学知识。同时,还可以根据回答情况,及时调整教学策略,帮助学生更好地掌握程序的相关知识。】
活动2:实验验证,调试修改参数(难点)
使用数据线连接主控板与电脑,下载程序后接通电源。按设想流程测试运行,记录结论。连续运行垃圾桶程序,观察其稳定性,确保超声波垃圾桶性能可靠,满足使用标准。
实验次数 探测距离(厘米) 舵机开盖角度 舵机关盖角度 等待时间(秒) 运行效果
1 30 90 0 5 关盖时翘边,等待时间过长
2
3
最终得到的实验数据是探测距离(厘米)______,舵机开盖角度______,舵机关盖角度______,等待时间(秒)______。
学习评价 评价结果
在测试控制效果时,能认真记录运行结果,并根据测试结果调整相关数据或结构,直到智能垃圾桶稳定运行。 ☆☆☆
【设计意图:实验验证,调试修改参数是为了提高智能垃圾桶的稳定性。】
(四)实验总结
1.分析评估实验结果:
小组间展示交流制作的智能垃圾桶,互相验证对方作品的可靠性、实用性,小组互评,根据评价结果完善作品。
实验结论:______________直接影响桶盖开启的灵敏度。
2.编程控制小型系统的要点:__________________________________________。
【设计意图:帮助学生梳理知识点,并强调注意事项。】
(五)实验拓展
为了进一步提高智能垃圾桶的便捷性,需要在智能垃圾桶上增加一红一绿两个警示灯,在智能垃圾桶盖打开的时候红灯亮起,红灯闪烁3秒之后再关闭,然后绿灯亮起。想一想,该如何改写智能垃圾桶的控制程序?
【设计意图:培养学生的持续学习兴趣。培养学生的跨学科思维,提高学生的综合素质。】
八、实验评价
评价标准 评价结果
通过调整超声波测距的阈值,能灵活控制垃圾桶盖的开启灵敏度。 ☆☆☆
连续运行垃圾桶程序一段时间,观察是否出现故障或异常情况,能评估系统的稳定性。 ☆☆☆
能认识到生活中的小型控制系统中可能会存在安全风险。 ☆☆☆
这节课我点亮了_____颗☆
九、学习反思
通过本次实验,我们深入了解了Arduino主控板、超声波传感器、舵机的工作原理和应用方法。在实际操作中遇到了一些问题和挑战,但也通过不断的调试和改进找到了解决方案。未来可以进一步优化系统的性能和稳定性,并探索更多的自动化应用场景。
结合设计方案和搭建的硬件,按智能垃圾桶运行的典型环节,确认控制流程。
线路连接注意事项:
超声波传感器:
VCC(红色线) —— 5V
GND(黑色线) —— GND
Trig(绿色线)—— ?
Echo(白色线)—— ?
舵机:
VCC(红色线) —— 5V
GND(粽色线) —— GND
信号线(黄色线)—— ?
教学设计
一、学习内容
本课是“制作智能垃圾桶”最后一个子项目,通过编程控制垃圾桶的自动开关盖功能。在此环节,对已搭建的硬件原型,学生需要确认控制流程,确定控制参数,编写控制程序,并进行测试和调整。通过这个子项目,学生的逻辑思维、创新能力和解决复杂问题的能力将得到显著提升。
二、学习基础
通过前两课的智能垃圾桶的设计与硬件搭建,学生对此项目有了一定的了解,同时具备基本的逻辑思维能力和动手操作能力。小组合作中也在不断提高参与度和协作能力。在编程控制方面,能够理解并绘制简单的流程图,能够根据流程图编写出相应的程序。这些知识和技能的储备将为学生顺利完成编程控制智能垃圾桶的任务打下坚实的基础。
三、问题梳理
1.素养问题
如何鼓励创新思维,以解决超声波垃圾桶项目中可能遇到的技术难题?
2.项目问题
如何确保超声波垃圾桶的性能稳定可靠,满足预期的使用标准?
四、学习目标与重难点
1.学习目标
(1)项目目标
学会编写控制程序,实现智能垃圾桶的“来人自动检测”与“自动开、关盖”。
(2)素养目标
能够通过编程实现常见传感器和执行器的控制。
2.学习重点和难点
(1)学习重点
选择合适的编程软件编写控制程序,实现垃圾桶的自动开关盖功能。
(2)学习难点
理解每条指令的作用,学会测试程序并进一步优化程序,实现合理的运行控制。
五、学习策略(学习规划、实验规划)
1.实验准备阶段
学生通过自主探索和团队合作的方式确认控制流程、确定控制参数,记录信号端口。
2.实验过程阶段
教师引导与师生协作,在此过程中,教师将扮演指导者的角色,帮助学生完成。软件连接以及程序编写与调试等任务。
3.实验结论阶段
小组讨论与记录,学生们将以小组为单位讨论实验结果,并共同填写实验记录单。
4.实验拓展阶段
知识延伸与创新思考,教师会向学生介绍更多关于开源硬件的知识,并鼓励他们思考如何利用这些智能设备来改善日常生活。
5.实验评价阶段
持续评估,整个学习过程中都包含对学生表现的过程性评价;同时,在每个环节结束时也进行总结性评价,确保每位同学都能从中受益并有所成长。
六、环境与资源
教学课件、配套课程资源包、开源硬件器材、必要的编程环境和工具等。
七、学习过程
(一)创设情境,明确目标
1.创设情境
在探索智能科技的奇妙旅程中,我们已共同完成了智能垃圾桶的设计与搭建。从创意初现到实物成型,每一步都满载着对智能生活的向往。如何实现智能垃圾桶从静态到动态,从简单到智能的华丽蜕变!我们将深入编程,用代码编织梦想,赋予智能垃圾桶真正的“智慧”。
2.明确实验目标
(1)通过编程控制传感器和执行器,实现垃圾桶盖的自动开关。
(2)思考如何利用智能硬件改善日常生活?
【设计意图:让学生明确实验的目标、方向和预期结果,从而指导整个实验过程。】
(二)实验分析,制订方案
需求分析 测距精准,自动开关盖。
实验材料 硬件 主板:Arduino Nano主控板
传感器:
执行器:
其他:LED信号灯、电源、卷尺
软件
实验步骤 1.小组讨论确认控制流程与相关参数。2.教师引导学生检查线路,记录各信号端口号,连接软件,编写控制程序。3.小组验证功能实现,并调试修改参数。4.小组间展示交流制作的智能垃圾桶,互相验证对方作品的可靠性、实用性。
【设计意图:确保实验的顺利进行,提高实验的准确性和可靠性。】
(三)实验准备
活动1:确认控制流程
学习评价 评价结果
能够结合设计方案和硬件搭建,完善智能垃圾桶编程控制流程图,明确各环节的位置,对控制流程有清晰的理解。 ☆☆☆
【设计意图:确认编程控制流程是为了确保程序能够按照预期的方式运行,实现既定的功能和目标。】
活动2:确定控制参数
编写智能垃圾桶“检测来人”“控制开关盖”功能的程序时,需要先确定相关的控制参数。
通过超声波传感器测量距离,当距离______设定值时,舵机转动开盖;当距离_____设定值时,舵机转动关盖。(填写“<=”或“>”)
学习评价 评价结果
在确定控制参数时,能与同学们积极讨论,合理填写检测来人的响应距离、开关盖时舵机转动的度数和放入垃圾的时长等参数。 ☆☆☆
【设计意图:确认编程控制参数它关系到程序是否能够成功实现预定目标,以及在实际运行中的表现。通过精心设计和不断优化,可以提高程序的质量和用户满意度。】
活动3:记录信号端口
小组合作,检查智能垃圾桶各部件线路连接,并记录各信号端口连接主板的端口号。
(实验注意事项:确保所有电线连接正确且牢固,避免松动导致接触不良。)
学习评价 评价结果
可以积极对实物模型进行检查,并记录下各个信号接口所对应的主板端口号。 ☆☆☆
【设计意图:检查线路是为了确保智能垃圾桶的正常运行,提高其稳定性和可靠性。】
(四)实验过程
活动1:编写控制程序(重点)
小组合作编写控制程序,师巡视指导。
有困惑的小组可以参考“微课2:编程控制智能垃圾桶1.mp4”或“图1:智能垃圾桶程序.png”。(实验注意事项:程序中的端口要与搭建时连接的端口对应。)
【设计意图:为了引导学生完成程序的编写,采用引导、微课、半成品形式来突破重点。】
学习评价 评价结果
在编写程序时,确保正确配置舵机、超声波传感器和数字LED发光模块的控制引脚,并合理设置延时等待时间以确保超声波传感器能够准确测量距离。 ☆☆☆
【设计意图:通过这些选择题,学生可以在思考的过程中逐渐理解程序的作用,并在选择正确答案的过程中巩固所学知识。同时,还可以根据回答情况,及时调整教学策略,帮助学生更好地掌握程序的相关知识。】
活动2:实验验证,调试修改参数(难点)
使用数据线连接主控板与电脑,下载程序后接通电源。按设想流程测试运行,记录结论。连续运行垃圾桶程序,观察其稳定性,确保超声波垃圾桶性能可靠,满足使用标准。
实验次数 探测距离(厘米) 舵机开盖角度 舵机关盖角度 等待时间(秒) 运行效果
1 30 90 0 5 关盖时翘边,等待时间过长
2
3
最终得到的实验数据是探测距离(厘米)______,舵机开盖角度______,舵机关盖角度______,等待时间(秒)______。
学习评价 评价结果
在测试控制效果时,能认真记录运行结果,并根据测试结果调整相关数据或结构,直到智能垃圾桶稳定运行。 ☆☆☆
【设计意图:实验验证,调试修改参数是为了提高智能垃圾桶的稳定性。】
(四)实验总结
1.分析评估实验结果:
小组间展示交流制作的智能垃圾桶,互相验证对方作品的可靠性、实用性,小组互评,根据评价结果完善作品。
实验结论:______________直接影响桶盖开启的灵敏度。
2.编程控制小型系统的要点:__________________________________________。
【设计意图:帮助学生梳理知识点,并强调注意事项。】
(五)实验拓展
为了进一步提高智能垃圾桶的便捷性,需要在智能垃圾桶上增加一红一绿两个警示灯,在智能垃圾桶盖打开的时候红灯亮起,红灯闪烁3秒之后再关闭,然后绿灯亮起。想一想,该如何改写智能垃圾桶的控制程序?
【设计意图:培养学生的持续学习兴趣。培养学生的跨学科思维,提高学生的综合素质。】
八、实验评价
评价标准 评价结果
通过调整超声波测距的阈值,能灵活控制垃圾桶盖的开启灵敏度。 ☆☆☆
连续运行垃圾桶程序一段时间,观察是否出现故障或异常情况,能评估系统的稳定性。 ☆☆☆
能认识到生活中的小型控制系统中可能会存在安全风险。 ☆☆☆
这节课我点亮了_____颗☆
九、学习反思
通过本次实验,我们深入了解了Arduino主控板、超声波传感器、舵机的工作原理和应用方法。在实际操作中遇到了一些问题和挑战,但也通过不断的调试和改进找到了解决方案。未来可以进一步优化系统的性能和稳定性,并探索更多的自动化应用场景。
结合设计方案和搭建的硬件,按智能垃圾桶运行的典型环节,确认控制流程。
线路连接注意事项:
超声波传感器:
VCC(红色线) —— 5V
GND(黑色线) —— GND
Trig(绿色线)—— ?
Echo(白色线)—— ?
舵机:
VCC(红色线) —— 5V
GND(粽色线) —— GND
信号线(黄色线)—— ?
同课章节目录