专题12 功和机械能(一)(含答案+解析)-【中考真题汇编】2025年中考物理真题分类汇编(全国通用)
文档属性
| 名称 | 专题12 功和机械能(一)(含答案+解析)-【中考真题汇编】2025年中考物理真题分类汇编(全国通用) |
|
|
| 格式 | docx | ||
| 文件大小 | 2.6MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-07-12 00:00:00 | ||
图片预览
文档简介
专题12 功和机械能(一)
一、选择题
1.(2025·长沙) 在紧急救援时,可用充氦浮空器将发电机组升至高空发电,为现场提供照明和通信。当浮空器匀速升空时,它的( )
A.动能增大 B.动能减小
C.重力势能增大 D.机械能减小
2.(2025·陕西)如图,是我国为满足森林灭火和水上救援等迫切需求而研制的大型水陆两栖飞机“鲲龙”AG600。工作时,它可在20秒内吸水12吨,并在4秒内倾泻完毕,能实现水源与火场之间多次往返。下列关于“鲲龙”的说法正确的是( )
A.停在水面上不工作时,处于平衡状态
B.停在水面上吸水过程中,下表面受到水的压强不变
C.在空中水平匀速飞行时,机翼上方空气流速大,压强大
D.降落过程中,重力势能不变
3.(2025·陕西)周末,小明在家进行大扫除,如图所示为小明竖直向上施力抬起沙发时的情景。已知沙发的质量为50,沙发的重心在其中心位置,重心上升的高度为20,g取10。下列说法正确的是
A.沙发扶手的高度约为50
B.小明抬沙发时,沙发相当于一个费力杠杆
C.在图示位置静止时,小明对沙发的力为250N
D.小明对沙发做的功为200J
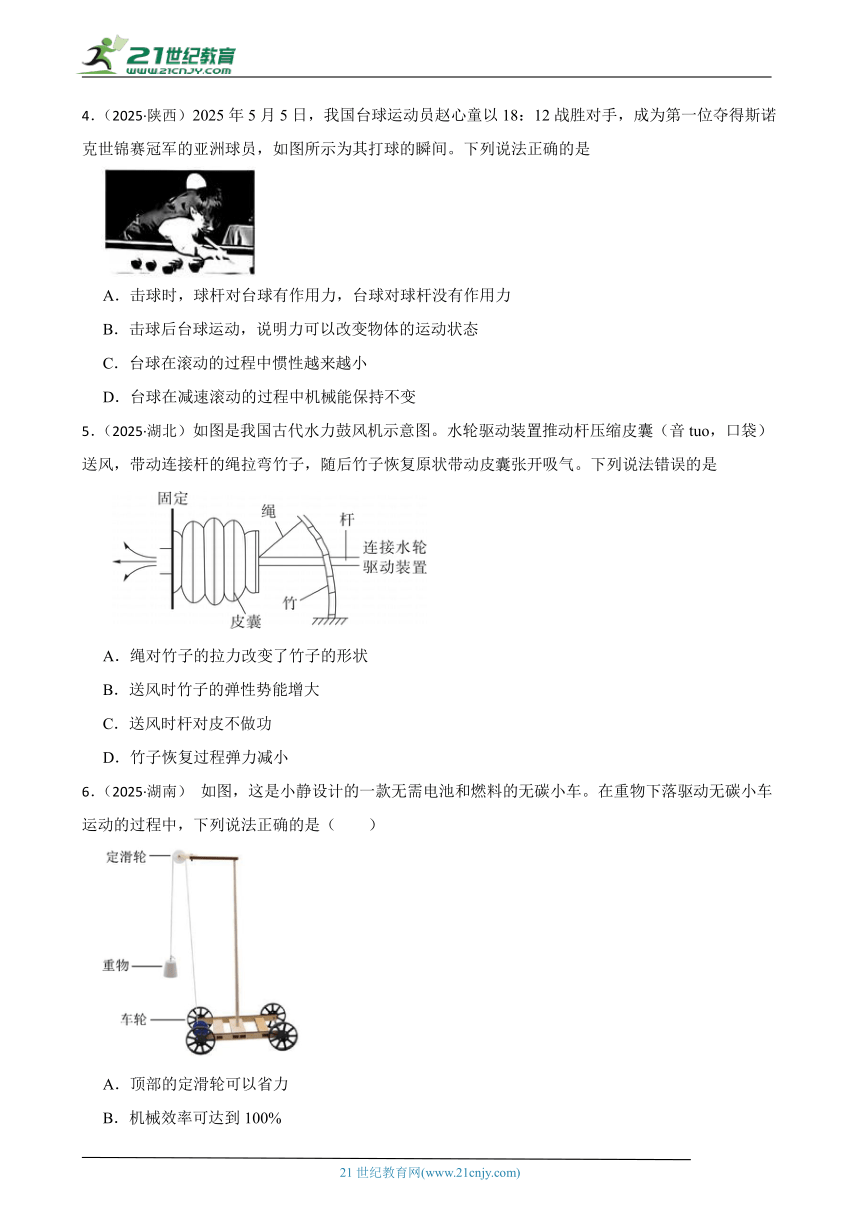
4.(2025·陕西)2025年5月5日,我国台球运动员赵心童以18:12战胜对手,成为第一位夺得斯诺克世锦赛冠军的亚洲球员,如图所示为其打球的瞬间。下列说法正确的是
A.击球时,球杆对台球有作用力,台球对球杆没有作用力
B.击球后台球运动,说明力可以改变物体的运动状态
C.台球在滚动的过程中惯性越来越小
D.台球在减速滚动的过程中机械能保持不变
5.(2025·湖北)如图是我国古代水力鼓风机示意图。水轮驱动装置推动杆压缩皮囊(音tuo,口袋)送风,带动连接杆的绳拉弯竹子,随后竹子恢复原状带动皮囊张开吸气。下列说法错误的是
A.绳对竹子的拉力改变了竹子的形状
B.送风时竹子的弹性势能增大
C.送风时杆对皮不做功
D.竹子恢复过程弹力减小
6.(2025·湖南) 如图,这是小静设计的一款无需电池和燃料的无碳小车。在重物下落驱动无碳小车运动的过程中,下列说法正确的是( )
A.顶部的定滑轮可以省力
B.机械效率可达到100%
C.主要是利用重力势能转化为动能
D.给车轮轴承加润滑油可以增大摩擦力
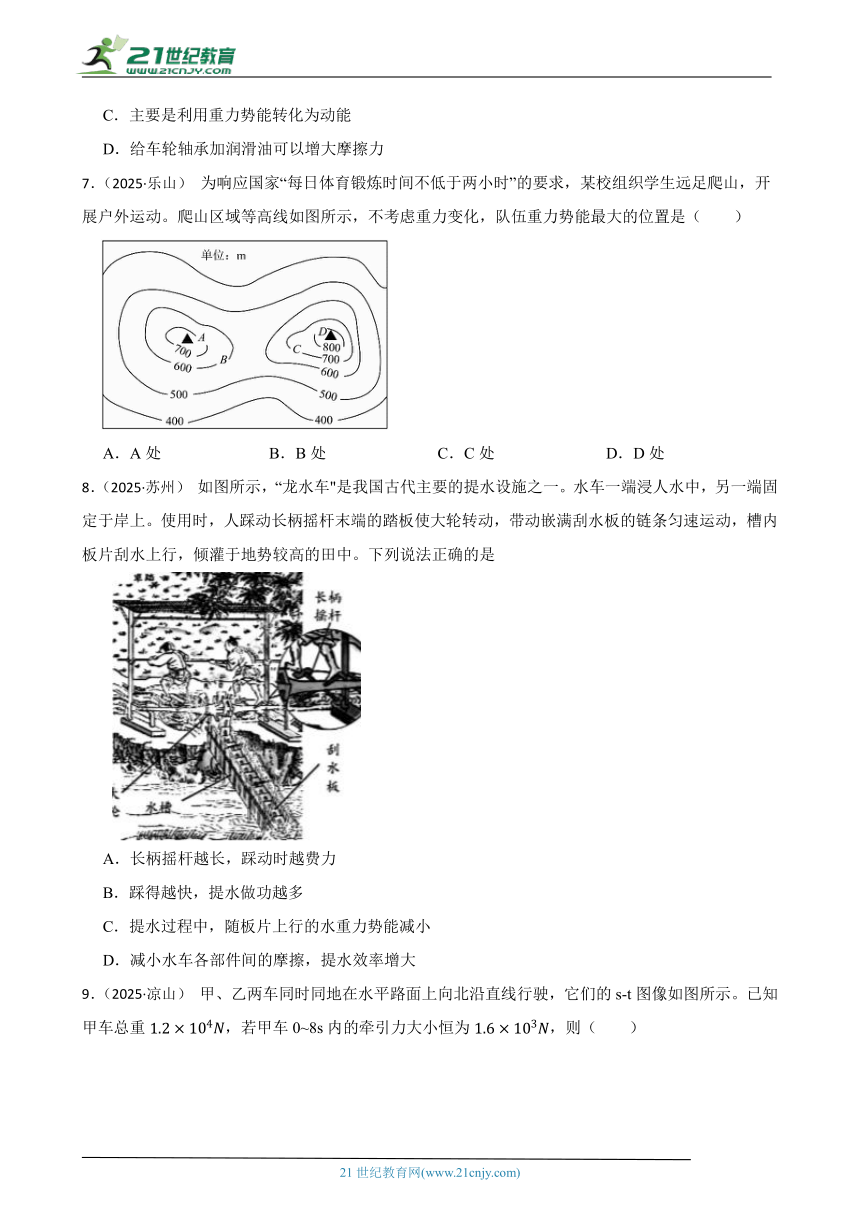
7.(2025·乐山) 为响应国家“每日体育锻炼时间不低于两小时”的要求,某校组织学生远足爬山,开展户外运动。爬山区域等高线如图所示,不考虑重力变化,队伍重力势能最大的位置是( )
A.A处 B.B处 C.C处 D.D处
8.(2025·苏州) 如图所示,“龙水车"是我国古代主要的提水设施之一。水车一端浸人水中,另一端固定于岸上。使用时,人踩动长柄摇杆末端的踏板使大轮转动,带动嵌满刮水板的链条匀速运动,槽内板片刮水上行,倾灌于地势较高的田中。下列说法正确的是
A.长柄摇杆越长,踩动时越费力
B.踩得越快,提水做功越多
C.提水过程中,随板片上行的水重力势能减小
D.减小水车各部件间的摩擦,提水效率增大
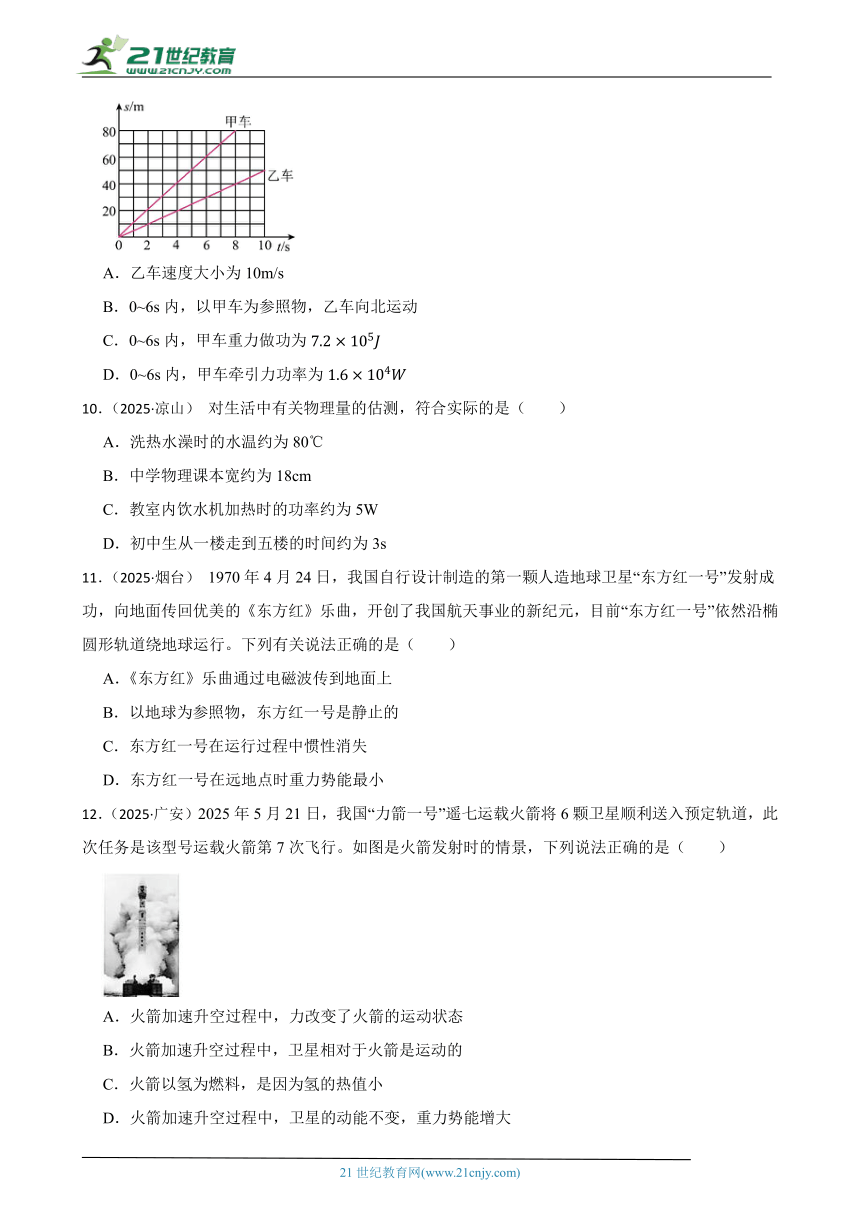
9.(2025·凉山) 甲、乙两车同时同地在水平路面上向北沿直线行驶,它们的s-t图像如图所示。已知甲车总重,若甲车0~8s内的牵引力大小恒为,则( )
A.乙车速度大小为10m/s
B.0~6s内,以甲车为参照物,乙车向北运动
C.0~6s内,甲车重力做功为
D.0~6s内,甲车牵引力功率为
10.(2025·凉山) 对生活中有关物理量的估测,符合实际的是( )
A.洗热水澡时的水温约为80℃
B.中学物理课本宽约为18cm
C.教室内饮水机加热时的功率约为5W
D.初中生从一楼走到五楼的时间约为3s
11.(2025·烟台) 1970年4月24日,我国自行设计制造的第一颗人造地球卫星“东方红一号”发射成功,向地面传回优美的《东方红》乐曲,开创了我国航天事业的新纪元,目前“东方红一号”依然沿椭圆形轨道绕地球运行。下列有关说法正确的是( )
A.《东方红》乐曲通过电磁波传到地面上
B.以地球为参照物,东方红一号是静止的
C.东方红一号在运行过程中惯性消失
D.东方红一号在远地点时重力势能最小
12.(2025·广安)2025年5月21日,我国“力箭一号”遥七运载火箭将6颗卫星顺利送入预定轨道,此次任务是该型号运载火箭第7次飞行。如图是火箭发射时的情景,下列说法正确的是( )
A.火箭加速升空过程中,力改变了火箭的运动状态
B.火箭加速升空过程中,卫星相对于火箭是运动的
C.火箭以氢为燃料,是因为氢的热值小
D.火箭加速升空过程中,卫星的动能不变,重力势能增大
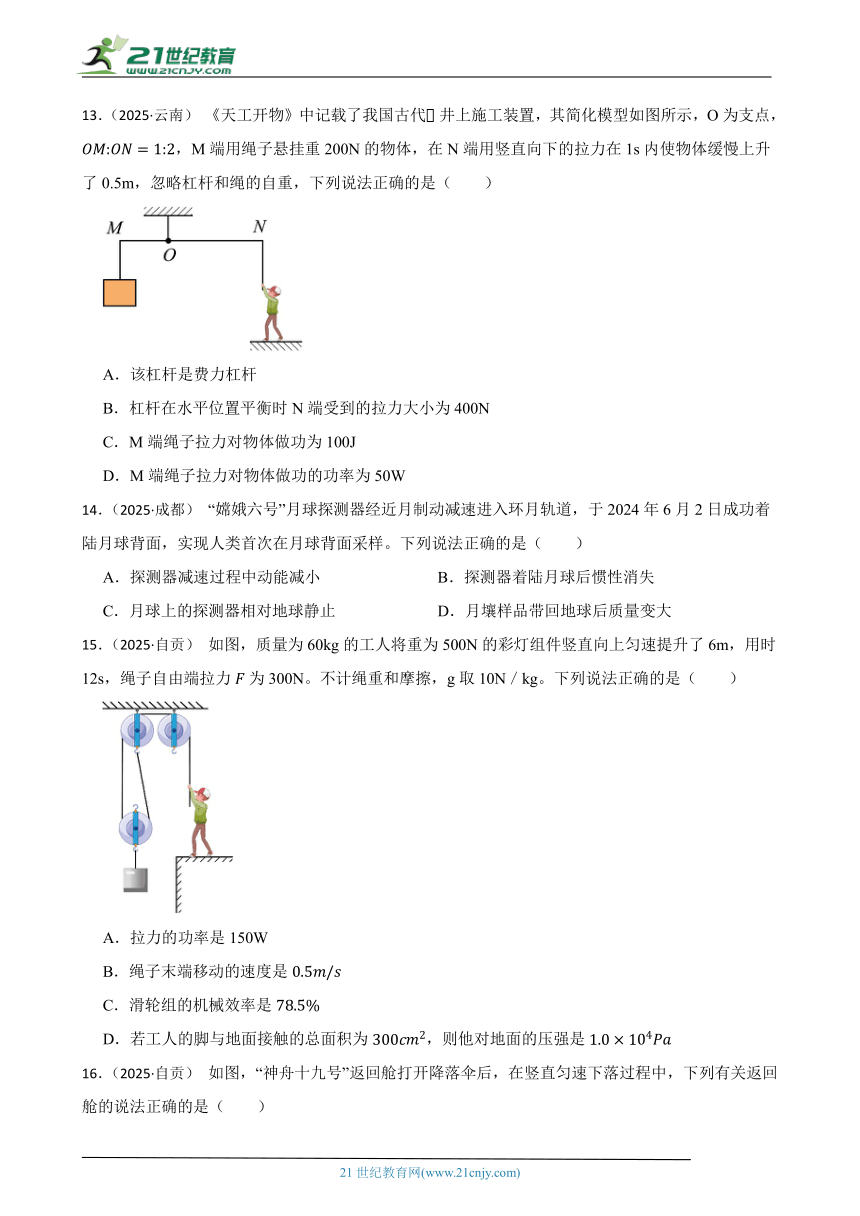
13.(2025·云南) 《天工开物》中记载了我国古代井上施工装置,其简化模型如图所示,O为支点,,M端用绳子悬挂重200N的物体,在N端用竖直向下的拉力在1s内使物体缓慢上升了0.5m,忽略杠杆和绳的自重,下列说法正确的是( )
A.该杠杆是费力杠杆
B.杠杆在水平位置平衡时N端受到的拉力大小为400N
C.M端绳子拉力对物体做功为100J
D.M端绳子拉力对物体做功的功率为50W
14.(2025·成都) “嫦娥六号”月球探测器经近月制动减速进入环月轨道,于2024年6月2日成功着陆月球背面,实现人类首次在月球背面采样。下列说法正确的是( )
A.探测器减速过程中动能减小 B.探测器着陆月球后惯性消失
C.月球上的探测器相对地球静止 D.月壤样品带回地球后质量变大
15.(2025·自贡) 如图,质量为60kg的工人将重为500N的彩灯组件竖直向上匀速提升了6m,用时12s,绳子自由端拉力为300N。不计绳重和摩擦,g取10N/kg。下列说法正确的是( )
A.拉力的功率是150W
B.绳子末端移动的速度是
C.滑轮组的机械效率是
D.若工人的脚与地面接触的总面积为,则他对地面的压强是
16.(2025·自贡) 如图,“神舟十九号”返回舱打开降落伞后,在竖直匀速下落过程中,下列有关返回舱的说法正确的是( )
A.重力势能减小 B.动能增大
C.重力势能转化为动能 D.机械能守恒
17.(2025·重庆市) 乒乓球是我国全民喜爱的体育项目。下列说法正确的是( )
A.球拍面上的橡胶是导体
B.乒乓球从桌上弹起上升过程重力势能减小
C.新球拍有橡胶味说明分子在不停地做无规则运动
D.乒乓球被击出后继续运动是因为受到惯性的作用
18.(2025·南充)新学期,老师组织同学们进行了一场有意义的劳动——搬新书,在下列过程中,同学们对书不做功的是
A.甲图中将书从地面提起的过程 B.乙图中在水平路面推车的过程
C.丙图中将书搬上教学楼的过程 D.丁图中将书堆放在桌面的过程
19.(2025·南充)近年来,我国科技取得了巨大成就,下列分析不合理的是
A.四川舰上的电磁弹射系统工作原理与电动机相同
B.人形机器人对舞台的压力大小等于地面对它的支持力大小
C.运-20大型运输机获得的升力利用了流体压强与流速的关系
D.天宫二号由近地点向远地点运动时重力势能减小,动能增加
20.(2024·连云港) 2024年4月25日,我国长征运载火箭成功将神舟十八号载人飞船送往预定轨道。载人飞船离开地面加速上升的过程中( )
A.动能增大,重力势能不变 B.动能增大,重力势能增大
C.动能不变,重力势能不变 D.动能不变,重力势能增大
21.(2025·黑龙江) 如图,2025年4月19日,我国在太原卫星发射中心使用长征六号改运载火箭成功将试验二十七号卫星01星﹣06星发射。有关发射的描述正确的是( )
A.发射前,以发射塔为参照物,运载火箭是运动的
B.发射时,发射塔周围出现大量“白气”是升华现象
C.加速升空过程中,卫星的动能转化为重力势能
D.加速升空过程中,卫星的机械能增大
二、填空题
22.(2025·绥化) 哈尔滨冰雪大世界的超长大滑梯是人们喜爱的冰雪项目。当游客滑下时,他的重力势能 (选填“变大”“变小”或“不变”);以游客为参照物,地面是 (选填“运动”或“静止”)的。
23.(2025·山东) 山东潍坊风筝是国家级非物质文化遗产之一,其制作主要经过“扎”“绘”“糊”“放”等过程。
(1)“扎”的过程,用力将竹篾弯折,说明力可以改变物体的 ;
(2)“绘”的过程,闻到颜料淡淡的气味,是因为分子在不停地做 ;
(3)“糊”的过程,胶水能将纸和框架粘住主要是因为分子间存在 ;
(4)“放”的过程,风筝上升时,其重力势能 (选填“变大”“变小”或“不变”)。
24.(2025·天津市)我国大力发展新质生产力。最新研发的人形机器人,关节处有液态润滑剂形成的润滑膜,可减小 ,使其动作更灵活;山区果农用无人机将一筐橙子从山上运往山下的过程中,这筐橙子的重力势能 (选填“增大”“减小”或“不变”)。
25.(2025·湖南) 科技赋能乡村振兴,农业无人机以其安全可靠、高效灵活、成本低廉的优势而广泛应用。图是无人机正在喷洒农药的场景。
(1)工作人员熟练操作手柄,通过 波无线遥控无人机,实现定点起飞。无人机沿水平方向匀速直线飞行300m,用时20s,则无人机水平飞行时的速度大小为 m/s。
(2)装载农药的无人机水平匀速直线飞行100s,消耗的电能为0.25kW·h,若该无人机消耗的电能转化为机械能的效率为80%,则此过程中无人机内电动机的机械功率为 W。
26.(2025·乐山) 如图所示,在斜面上将一个重10N的物体匀速拉到高处,沿斜面向上的拉力,斜面长、高,则拉力所做的功为 J;把重物直接提升h所做的功作为有用功,忽略弹簧测力计的重力和空气阻力,则斜面对物体的摩擦力为 N。
27.(2025·泸州)小兴学习了简单机械后,设计了如图所示的装置,粗糙斜面长1m、高0.5m,滑轮组位于斜面顶端,不计绳重、滑轮重、滑轮的摩擦,各段绳子均与斜面平行。她把重为24N的物体从斜面底端匀速拉到顶端,用时10s,弹膏测力计示数为5N, 则对物体做的有用功为 J.绳子末拉力做功功率为 W,物体受到斜面的摩擦力大小为 N
28.(2025·扬州)如图是《天工开物》记载的我国古人磨面的场景.水从高处流下来, 能转化为 能,冲击水轮机带动石磨转动.石磨接触面粗糙,是为了增大 .
29.(2025·烟台) 汽油机是燃油汽车的动力来源之一。如图所示是某台汽油机工作时的能量数据,图中横线处应填写的内容是:① ② 。若汽油的热值为,则该工作过程中消耗的汽油质量为 kg。
30.(2025·达州) “奇思妙想”小组组装了如图所示装置,测量滑动摩擦力大小。长木板B置于水平面,在水平拉力作用下向右做匀速直线运动,速度为0.15m/s,弹簧测力计的示数为2N。拉力F的功率为 W,B受到水平面的摩擦力为 N(不计绳重及绳与滑轮间摩擦、弹簧测力计始终保持竖直状态)。
31.(2025·达州) 周末,小明陪同爸爸到“八台山”旅游,携带如图所示的“水气压计”向山顶攀登过程中,“水气压计”管内液面会 (选填“上升”、“下降”或“不变”);小明的重力势能会 (选填“增大”、“减小”或“不变”)。
32.(2025·自贡) 如图为初中体育均衡检测中握力计的工作原理简图,电源电压恒为3V,R的阻值大小与其连入电路的长度成正比,R0为保护电阻,弹簧电阻不计。握力F为零时,P在A端;握力F最大时,P在B端。P从A端滑至B端过程中,弹簧的弹性势能将 (选填“减小”“增大”或“不变”)。电路中电流表的变化范围是0.1-0.6A,R连入电路的阻值变化范围是 。
33.(2025·重庆市) 在老旧小区改造中,工人用如图所示的装置把质量为的材料从地面竖直匀速提高,则绳子自由端移动的距离是 ,若拉力为,这个装置的机械效率是 %。
34.(2025·南充)如图所示,重为100N 的物体在水平拉力F为10N 的作用下,沿水平面向左做匀速直线运动,物体受到水平地面的摩擦力是其重力的0.12倍,若物体在10s内向左移动了 10m,则拉力所做的功为 J,滑轮组有用功的功率为 W。
35.(2025·威海) 某汽车加热坐椅的工作原理如图所示,R1、R2均为发热电阻,通过控制开关通断,实现高、中、低三挡加热功能,其中高、中档位的电功率分别为60W、30W,电源电压为12V。处于低档位时开关的通断情况为 ,此时电路消耗的总功率为 W。
36.(2025·威海) 如图所示,用150N的推力沿斜面向上将重为500N的小车从斜面(高1.2m,长5m)底端匀速推到顶端,用时20s。则推力做功为 J,有用功的功率为 W。
37.(2025·黑龙江) 如图所示,举重运动员将杠铃举起的过程中,举重运动员对杠铃 (填“做功”或“没做功”);当举重运动员将杠铃高高举起后保持静止时,地面对举重运动员的支持力与举重运动员受到的重力 (填“是”或“不是”)一对平衡力。
38.(2025·长沙) 无人机送快递为市民的生活带来了极大的便利。在某次取货途中,无人机载着空货箱竖直匀速上升36m用时30s。不计空气阻力,g取10N/kg。
(1)无人机上升时,以地面为参照物,它是 的;
(2)无人机竖直匀速上升时的速度为 m/s;
(3)在取货点,工作人员将快递放入货箱,无人机再次升空,竖直匀速上升30m用时30s。已知无人机配备的货箱质量为1kg,取货前后两次匀速升空过程中无人机对货箱拉力做功的功率之比为1∶2,放入货箱的快递质量为 kg。
39.(2025·吉林) 冰雪“出圈”,文化“出彩”,大美吉林的地域文化,为全国各地的游客带来了别具一格的体验。
(1)精彩纷呈的冰雪实景戏曲秀中,一位身着京剧戏服的小伙在雪道上飞驰。以他使用的滑雪板为参照物,小伙是 的,在加速下滑的过程中其动能 。
(2)游客沿着长度为200m的冰雪大滑梯滑下,历时25s,游客下滑的平均速度是 m/s,滑到底端时游客不能立刻停下,是因为游客具有 。
三、实验探究题
40.(2025·湖南) 小霞用如图甲所示的器材测量小灯泡的额定功率。已知电源电压为3V且保持不变。小灯泡额定电压为2.5V。
(1)请你用笔画线代替导线,将图甲中的实物图连接完整,要求导线不得交叉 ;
(2)正确连接好电路,闭合开关前,应将滑动变阻器的滑片P移到最 端;
(3)闭合开关后,移动滑片P,观察到电压表的示数为2.5V时,电流表的示数如图乙所示,则小灯泡的额定功率为 W;
(4)进行相同实验的另一同学,检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,此时观察到 表的指针有明显偏转。
41.(2025·威海) 如图1所示,我国部分古代建筑屋顶采用弧线型设计,“如鸟斯革,如翚斯飞”。屋顶为什么这样设计?某兴趣小组通过实验进行探究。
根据经验,雨水流过屋顶的时间越短,防雨效果越好,为此他们首先进行了实验一。
实验一:探究雨滴经过屋顶的时间与哪些因素有关
(1)猜想:影响雨滴流过屋顶(高度、宽度均相同)时间的因素可能为:雨滴在屋顶运动的初始位置、屋顶材料、屋顶形状(雨滴与屋顶碰撞之后的速度近似为零,他们认为可不用研究雨滴初始速度这一因素)
设计实验方案:
请写出1个测量时间的工具: 。
图2所示5个实验:用钢珠代替雨滴,将相同钢珠从屋顶不同位置静止释放,记录钢珠经过屋顶的时间。若研究该时间与屋顶材料的关系,应选择实验 进行研究。
测量与分析:
用传感器获得图2甲、乙中钢珠从屋顶顶端滑到底端完整的路程s和时间t实验数据,画出s-t关系如图3所示,其中图像 (选填“c”“d”)表示钢珠运动的平均速度较大;钢珠滑过屋顶 (选填“甲”“乙”)的时间较短。
(2)实验二:探究下雨时不同屋顶对墙体的保护能力
如图3所示,甲、乙、丙是下方墙体相同、屋顶的材料相同但形状不同的三个建筑。将代替雨滴的相同钢珠分别在甲、乙屋顶顶端静止滑下落到水平地面,测量落地点到墙的距离s1、s2,数据如表2所示。
表2
实验次数 距离/cm
s1 s2
1 45 56
2 43 59
3 44 58
根据表2推测:为防止雨水落地时飞溅打湿墙体,下雨时 对墙体保护更好(选填“甲”“乙”)。若不计一切阻力,甲图中钢珠落地时的动能 乙图中钢珠落地时的动能(选填“<”“=”“>”)。
实验三:探究不同屋顶对建筑采光的影响
(3)图3甲、乙、丙三个建筑右侧墙体均安装大型窗户,某时刻阳光方向如图所示,阳光能够照射到房间内距离最远的是 (选填“甲”“乙”“丙”)。
42.(2025·黑龙江) 如图1,这是小明同学做“探究阻力对物体运动的影响”的实验装置。
(1)实验前,小明同学用大小相同的力将手分别压在毛巾和木板表面上,并向前滑动,在此过程中小明感到 (填“毛巾”或“木板”)对手的运动的阻碍作用较大些。
(2)小明打算实验时将同一辆小车从同一个斜面上的同一高度处,由静止开始滑下,他这样操作的目的是为了使小车运动到水平面时具有相同的 。
(3)实验时,让小车从斜面上由静止滑下,观察小车在毛巾和木板表面上滑行的距离。小明同学发现:当小车受到的阻力越小,则小车运动的距离就越 。由此可进一步推理得出:若运动的小车不受阻力,它将会一直做 运动。
(4)小明还想探究物体的动能大小与物体速度的关系,他进行了如图2甲、乙所示的实验。他将一个小钢球分别放在同一斜面上的 (填“相同”或“不同”)高度处,由静止滑下,撞击放在水平桌面上的木块,比较木块移动的距离。当他将小钢球放在斜面上较高处实验时,发现小球撞击木块后,木块直接冲出水平桌面,为避免这种现象发生,请你为小明同学提出一条较合理的改进建议: 。
四、计算题
43.(2025·山东) 为了促进低空经济高质量发展,山东省多个城市正在积极构建无人机智慧物流体系。如图所示,自重300N的无人机装载重200N的货物后停在水平地面上,与地面的总接触面积为0.01m2,无人机运送货物过程中,达到限定速度后,匀速上升100m,接近限定高度。求:
(1)无人机转载货物后对水平地面的压强;
(2)无人机匀速上升过程对货物做的功。
44.(2025·福建) 运-20是我国自主研制的重型运输机,如图。飞机获得的升力与其在平直跑道上滑行速度v的平方成正比,即,为定值(未知)。飞机在平直跑道上从静止开始加速,当速度达到时,飞机即将离地起飞,此时飞机所受升力与重力相等。升空后,飞机若以速度800km/h沿水平直线匀速飞行0.5h,其发动机在水平方向的牵引力大小为。
(1)求升空后飞机在上述0.5h内通过的路程。
(2)求升空后飞机在上述0.5h内水平方向牵引力做的功。
(3)已知飞机重力为,求飞机在跑道上滑行速度为时受到的支持力。
45.(2025·苏州)叉车常用于货物的转运,如图所示。叉车在10s内将质量为 300kg 的货箱匀速竖直提升3m,g 取 ION/kg。求此过程中:
(1)货箱的速度;
(2)叉车对货箱所做的功;
(3)叉车对货箱所做功的功率。
46.(2025·广安)某同学看了我国航空母舰发展简介后对力学产生了浓厚的兴趣。他用底面积为的长方体容器(厚度不计)装一定量的水,将一个重为4N,边长为10cm的正方体A放入容器中处于漂浮状态。如图所示,此时水的深度为18cm。(,g取10N/kg)求:
(1)容器底部受到水的压强;
(2)A漂浮时浸入水中的深度;
(3)若将与A形状体积完全相同的物体B平放在A的正上方,A、B一起向下运动,当静止时一起处于悬浮状态。求A、B一起开始运动到B刚好浸没时,B的重力做的功。(容器足够高,水不溢出,A、B不吸水)
47.(2025·威海) 采摘机器人在智慧农业中广泛使用,兴趣小组设计的某采摘机器人部分工作原 理如图所示,可以“前进”“后退”“照明”;开关S1、S2用绝缘柄相连,可同时连接触点“1”或“2”,电动机均正常工作。部分元件参数:电动机(24V 96W),灯泡L(18V 5.4W),滑动变阻器R(50Ω 1A),电流表(0~0.6A)。
(1)通过控制开关S1、S2,可实现前进、后退,原因是什么?
(2)电动机(线圈电阻为2Ω)正常工作5min消耗的电能和产生的热量分别为多少?
(3)闭合S3,调节灯泡亮度时,为保证各元件安全,R连入电路的最小阻值为多少?(灯丝电阻随温度变化忽略不计)
五、综合题
48.(2025·烟台) 为了节约电能又不影响照明,工人师傅设计出一个路灯改造方案。此前,每个路灯装有一只“220V 100W”的灯泡L0。此次改造要为每个路灯加装一只相同规格的灯泡L,并安装一个电磁控制感应装置,当夜幕降临时,光控开关闭合,路灯处于低功率的柔光状态;当行人走进感应区时,灯光瞬间变亮,离开感应区时,路灯又恢复原来的柔光状态。图甲是设计的电路(加装的灯泡L未画出),控制电路的电源电压恒为4.5V,压敏电阻R的阻值随压力大小变化的图像如图乙所示,当通过电磁铁的电流等于或大于临界值时,衔铁会被电磁铁吸引而转换触点。工作电路的电源电压220V不变,不考虑灯丝电阻变化,电磁铁线圈电阻忽略不计。
(1)为达到改造要求,工人师傅需要将灯泡L接在电路中 (选填“A”或“B”)处。从安全用电角度考虑,工作电路的导线 (选填“C”或“D”)端应接火线。
(2)若控制电路中R1接入的阻值为55Ω,当感应区上受到的压力时,衔铁被电磁铁吸引转换触点,则感应装置中电磁铁的电流临界值是多少?保持电磁铁电流临界值不变,要想让重力更小的人经过感应区时路灯变亮,写出一种可行的改进办法。
(3)若某路灯每天工作总时间为10h,处于柔光状态的时间累计为8h,求改造后这个路灯在六月份(30天)节约的电能(控制电路消耗的电能忽略不计)。
(4)如图丙所示,在方案实施过程中,工人师傅改装完某处的路灯后,需要把重为200N的材料车沿倾斜路面推至下一路灯处,M、N是途经的两点。已知MN两点间的距离为20m,竖直的灯杆与路面夹角为,材料车受到的摩擦力大小是其重力的0.05倍。假设推力F的方向始终与倾斜路面平行,求工人师傅将材料车从M点匀速推至N点的过程中推力F做的功。
答案解析部分
1.C
当浮空器匀速升空时 ,速度不变,质量不变,高度增加,所以动能不变,重力势能增加,机械能增加,C正确,ABD错误;
综上选C。
机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比。
2.A
A、飞机停在水面上,保持静止,根据二力平衡可知,此时物体处于平衡状态,故A正确;
B、 停在水面上吸水过程中 重力变大,浸没在水中的深度变大,根据压强公式分析可知压强变大,故B错误;
C、 机翼上方空气流速大,压强小,故C错误;
D、 降落过程中, 飞机高度下降,重力不变,所以重力势能减小,故D错误。
综上选A。
1、机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比;
2、力和运动:物体静止或者做匀速直线运动,物体受到平衡力的作用;
3、压强和流速的关系:压强越大,流速越小,应用为飞机机翼上凸,空气流速快,导致压强较小,形成向上的升力;
4、压强的计算:公式为P=ρgh,压强和液体的密度、浸没深度有关,且密度越大,压强越大,深度越大,压强越大, 在同种液体的同一深度,液体向各个方向的压强 相同。
3.C
A、沙发扶手的高度约为人高度的一般,大致为50-60cm,故A错误;
B、抬起沙发时,沙发的重心和支点的距离即为阻力臂,小于动力臂,所以阻力大于动力,属于省力杠杆,故B错误;
C、根据杠杆平衡可知,F×L1=G×L2,L1=2L2,所以F=0.5G=250N,故C正确;
D、根据相似三角形可知,手运动的距离为重心距离的二倍,根据W=Fh计算可知,沙发做功W=250N×0.4m=1000J。故D错误。
综上选C。
1、杠杆原理的应用:杠杆的平衡条件为:动力*动力臂=阻力*阻力臂;;
2、做功:公式为W=Fs,其中s是沿着力的方向移动的距离。
4.B
A、 击球时,球杆对台球有作用力, 根据力作用的相互性可知, 台球对球杆有作用力,故A错误;
B、 击球后台球运动 ,力使得台球的运动状态发生变化,故B正确;
C、惯性和速度无关,和质量有关,质量不变,惯性不变,故C错误;
D、减速过程中,速度减小,质量不变,高度不变,所以动能减小,重力势能不变,所以机械能减小,故D错误。
综上选B。
1、相互作用力:作用力是相互的,施力物体也是受力物体。特点为大小相等、方向相反、作用在两个物体上;
2、力的作用效果:力会使物体的运动状态和物体形状发生改变;
3、惯性是物体的基本属性,只有物体重力有关,当物体速度发生变化时,由于惯性物体保持原来运动状态的属性,利用惯性的实例:运动员助跑起跳,乘车系安全带可以降低司机惯性带来的伤害,惯性不是力,不能用受到惯性、惯性力的作用进行表述。
4、机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比。
5.C
A.水轮驱动装置推动杆压缩皮橐送风时,带动连接杆的绳拉弯竹子,是绳对竹子的拉力改变了竹子的形状,故A正确不符合题意;
B.送风时竹子的弹性形变量增加,弹性势能增大,故B正确不符合题意;
C.送风时,杆压缩皮橐,杆对皮橐有压力,并且皮橐在力的方向上通过一段距离,所以杆对皮囊做功,故C错误符合题意;
D.竹子恢复原状过程中,弹性形变变小,弹力变小,故D正确不符合题意。
故选C。
A.绳拉弯竹子,是绳对竹子的拉力改变了竹子的形状;
B.弹性势能大小与弹性形变大小有关;
C.做功的要素:①作用在物体上的力;②物体在力的方向上通过的距离;
D.弹力大小与弹性形变的程度有关。
6.C
A.顶部的定滑轮不省力,也不省距离,故A错误;
B.由于摩擦力的存在,机械效率不可达到100%,故B错误;
C.该装置主要是利用重力势能转化为动能,故C正确;
D.给车轮轴承加润滑油可以减小摩擦力,故D错误。
故选C。
A.定滑轮不省力,也不省距离,但是可以改变力的方向;
B.任何机械的效率不可能为100%;
C.无碳小车的能量由重力势能转化为动能;
D.给轴承加润滑油可以减小摩擦力。
7.D
由图可知,D点的位置最高,由重力势能大小的影响因素可知,不考虑重力变化,队伍在D点的重力势能最大,故ABC不符合题意,D符合题意。
故选D。
重力势能与物体的质量和高度有关,质量相同时,高度越高,重力势能越大。
8.D
A.摇杆在使用过程中,动力臂大于阻力臂,属于省力杠杆,故A错误;
B.人踩动长柄摇杆末端的踏板使大轮转动,相同时间内转速越快输水做功越多,选项中缺少时间相同这个条件,故B错误;
C.一定质量的水被水车提升到高处,其质量不变、高度增加,则重力势能增大,故C错误;
D.增大机械效率的方法:一是增大提升的物重,二是减小摩擦,因此要提高“龙骨水车”提水效率,可以增大槽内板叶刮水的质量,或在各部件之间加润滑油来减小摩擦,故D正确。
故选D。
A.根据动力作用在轮上,可以省力;
B.转轮转速越快,相同时间内输水做功越多;
C.重力势能与质量和高度有关;
D.增大机械效率的方法:一是增大提升的物重,二是减小摩擦。
9.D
A.由图可知,乙车速度大小为,故A错误;
B.由图可知,甲车速度大小为,甲的速度大于乙的速度,甲、乙两车同时同地在水平路面上向北沿直线行驶,0~6s内,以甲车为参照物,乙车向南运动,故B错误;
C.0~6s内,甲车的重力的方向始终竖直向下,而甲车在竖直方向没有移动,因此不做功,故C错误;
D.若甲车0~8s内的牵引力大小恒为1.6×103N,则0~6s内,甲车牵引力的功率为P甲=F甲v甲=1.6×103N×10m/s=1.6×104W
故D正确。
故答案为:D。
根据题图中的相关数据计算乙车的速度。物体相对参照物的位置变化了,物体是运动的,物体相对参照物的位置不变,物体是静止的。根据功的公式W=Fs进行计算。根据P=Fv进行计算。
10.B
A、洗热水澡时的水温约为40℃,故A不符合实际;
B、中学物理课本宽约为18cm,故B符合实际;
C、教室内饮水机加热时的功率约为500W,故C不符合实际;
D、初中生从一楼走到五楼的时间约为30s,故D不符合实际。
故答案为:B。
首先要对相关物理量有个初步的认识,不同物理量的估算,有的需要凭借生活经验,有的需要经过简单的计算,有的要进行单位换算,最后判断符合要求的是哪一个。
11.A
A.卫星通信利用电磁波来传递信息的,即《东方红》乐曲通过电磁波传到地面上,故A正确;
B.东方红一号沿椭圆形轨道绕地球运行,以地球为参照物,它的位置在不断变化,即东方红一号是运动的,故B错误;
C.一切物体在任何情况下都有惯性,东方红一号在运行过程中仍具有惯性,故C错误;
D.相比于近地点,东方红一号在远地点时,质量不变,高度最高,重力势能最大,故D错误。
故选A。
A.卫星通信利用电磁波来传递信息的;
B.判断物体是运动还是静止的,取决于物体与参照物之间是否有位置变化,若有,则是运动的,若没有,则是静止的;
C.惯性是物体的一种固有属性,一切物体在任何情况下都有惯性;
D.物体的重力势能与物体的质量和高度有关,质量一定,高度越高,重力势能越大。
12.A
A.力可以改变物体的运动状态,火箭加速升空过程中,受到发动机推力等力的作用,速度不断增大,运动状态发生改变,故A正确;
B.火箭加速升空过程中,卫星相对于火箭的位置没有发生变化,是静止的,故B错误;
C.火箭以氢为燃料,是因为氢的热值大,完全燃烧相同质量的氢可以释放出更多的热量,转化为更多的机械能,故C错误;
D.火箭加速升空过程中,卫星的质量不变,速度增大,动能增大;高度增大,重力势能增大,故D错误。
故选A。
A.力不仅可以改变物体的形状,还能改变物体的运动状态。
B.物体相对于参照物的位置变化了,物体就是运动的;物体相对于参照物的位置不变,物体就是静止的。
C.氢的热值大,完全燃烧相同质量的氢可以释放出更多的热量。
D.动能大小的影响因素:质量、速度。质量越大,速度越大,动能越大。重力势能大小的影响因素:质量、被举得高度。质量越大,高度越高,重力势能越大。
13.C
A.由图可知,ON为动力臂,OM为阻力臂,OM:ON=1:2,即动力臂大于阻力臂ON>OM,则该杠杆是省力杠杆,故A错误;
B.根据杠杆平衡条件可得
匀速提升物体时,M端绳子拉力等于物体重力,则
代入数据
解得
故B错误;
C.M端绳子对物体的拉力等于物体的重力,物体上升0.5m,M端绳子拉力对物体做功为
故C正确;
D.拉力在1s内使物体缓慢上升了0.5m,则M端绳子拉力对物体做功的功率为
故D错误。
故答案为:C。
动力臂大于阻力臂,则该杠杆是省力杠杆;根据杠杆的平衡条件得G×OM=F×ON,据此得出F大小;根据W=Gh算出M端绳子拉力对物体做功;根据功率公式算出M端绳子拉力对物体做功的功率
14.A
A.动能的大小与物体的质量和速度有关,探测器减速过程中,质量不变,速度减小,所以动能减小,故A正确;
B.惯性是物体的固有属性,一切物体在任何情况下都有惯性,探测器着陆月球后仍然具有惯性,故B错误;
C.月球在绕地球公转,探测器在月球上,所以月球上的探测器相对地球是运动的,故C错误;
D.质量是物体的一种基本属性,它不随物体的位置、状态、形状等的改变而改变,月壤样品带回地球后质量不变,故D错误。
故选A。
A.动能的大小与物体的质量和速度有关。
B.惯性是物体的固有属性,一切物体在任何情况下都有惯性。
C.物体相对于参照物的位置变化了,物体就是运动的;物体相对于参照物的位置不变,物体就是静止的。
D.质量是物体的一种基本属性,它不随物体的位置、状态、形状等的改变而改变。
15.D
A.由图可知,动滑轮上的绳子段数为n=2,
绳子自由端移动的距离:s=nh=2×6m=12m,
拉力做的功:W=Fs=300N×12m=3600J,
拉力的功率:,故A错误;
B.绳子末端移动的速度:,故B错误;
C.滑轮组的机械效率:,故C错误;
D.工人的重力:G人=m人g=60kg×10N/kg=600N,
工作时矿工对水平地面的压力等于他的重力与绳子拉力之差,即:
F压=G人-F=600N-300N=300N,
地面的受力面积等于工人的脚与地面接触的总面积,
故他对水平地面的压强:,故D正确。
故选D。
A.由图可知,动滑轮上的绳子段数,根据s=nh可得绳子自由端移动的距离,根据W=Fs求拉力做的总功,根据求拉力的功率;
B.根据求绳子末端移动的速度;
C.根据求滑轮组的机械效率;
D.根据G=mg求工人的重力,工作时矿工对水平地面的压力等于他的重力与绳子拉力之差,根据求他对地面的压强。
16.A
A.重力势能大小的影响因素:质量和高度,返回舱在竖直匀速下落过程中,速度不变,高度减小,重力势能减小,故A正确;
B.动能大小的影响因素:质量和速度,返回舱在竖直匀速下落过程中,质量和速度都不变,则动能不变,故B错误;
C.返回舱穿越大气层时,返回舱克服空气的摩擦做功,重力势能转化为内能,故C错误;
D.返回舱匀速下落的过程中,它的质量不变,速度不变,故动能不变;同时质量不变,高度减小,重力势能减小,所以机械能变小,机械能不守恒,故D错误。
故选A。
A.重力势能与质量和高度有关;
B.动能与质量和速度有关;
C.根据能量转化的知识判断;
D.注意机械能与内能的转化。
17.C
A.球拍面上的橡胶是绝缘体,不是导体,故A错误;
B.乒乓球从桌上弹起上升过程中,质量不变,高度增加,重力势能增大,故B错误;
C.新球拍有橡胶味,是因为橡胶分子在不停地做无规则运动,扩散到空气中,使人能闻到橡胶味,故C正确;
D.乒乓球被击出后继续运动是因为乒乓球具有惯性,而不能说受到惯性的作用,惯性是物体的一种属性,不是力,故D错误。
故选C。
A.橡胶是绝缘体,不是导体。
B.影响重力势能大小的因素:质量和高度。质量越大,高度越高,重力势能越大。
C.不同物质互相接触时彼此进入对方的现象叫扩散,扩散现象说明分子在不停地做无规则运动。
D.一切物体具有惯性,而不能说受到惯性的作用,惯性是物体的一种属性,不是力。
18.B
A.将书从地面提起的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故A不符合题意;
B.乙图中在水平路面推车的过程,人的力作用在车上,书没有受到人的作用力,人对书没有做功,故B符合题意;
C.将书搬上教学楼的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故C不符合题意;
D.将书堆放在桌面的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故D不符合题意。
故选B。
做功的两个必要因素:作用在物体上的力,物体在力的方向上通过的距离;二者缺一不可。
19.D
A.电磁弹射系统与电动机的工作原理相同,即通电导体在磁场中受到力的作用,故A正确不合题意;
B.人形机器人对舞台的压力与地面对它的支持力是一对相互作用的力,大小相等,故B正确不合题意;
C.飞机的机翼做成上凸下平的形状,机翼上方的空气流速大、压强小,机翼下方的空气流速小、压强大,所以机翼受到一个向上的压强差,从而产生向上的升力,故C正确不合题意;
D.天宫二号由近地点向远地点运动时,质量不变,高度增加,速度减小,重力势能增加,动能减小,故D错误符合题意。
故选D。
A.电动机是根据通电线圈在磁场中受到力的作用而发生转动的原理制成的;
B.相互作用的两个力大小相等;
C.流体流速越大的位置,压强越小;
D.动能与物体的质量和速度有关,重力势能与物体的质量和高度有关。
20.B
载人飞船离开地面加速上升的过程中,质量不变,速度增大,动能增大,高度增大,重力势能增大。
故答案为:B。
动能大小的影响因素:质量和速度,质量越大,速度越大,动能越大;重力势能大小的影响因素:质量和高度,质量越大,高度越高,重力势能越大。
21.D
A.发射前,以发射塔为参照物,运载火箭相对发射塔的位置没有发生改变,是静止的,故A错误;
B.发射时,发射塔周围出现大量“白气”是液化现象,故B错误;
C.加速升空过程中,卫星质量不变,速度增大、高度增大,动能和重力势能都增大,此过程是燃料燃烧的内能转化为机械能,动能和重力势能没有发生相互转化,故C错误;
D. 加速升空过程中,卫星动能增大、重力势能增大,机械能等于动能与势能之和,所以机械能增大,故D正确。
故选D。
(1)在研究物体运动时,要选择参照的标准,即参照物,物体的位置相对于参照物发生变化,则运动,不发生变化,则静止;
(2)物质从气态变为液态的过程叫液化,液化要放热;
(3)机械能包括动能和势能;动能的大小与质量和速度有关,重力势能大小与质量和高度有关。
22.变小;运动
(1)当游客滑下时,质量不变,高度变小,重力势能变小;
(2)当游客下滑时,地面与游客之间有位置的变化,以游客为参照物,地面是运动的。
(1)重力势能的影响因素是物体的质量和高度,质量越大,高度越高,重力势能越大。
(2)看被研究的物体与参照物之间的相对位置是否发生了改变,如果发生改变,则物体是运动的;如果未发生变化,则物体是静止的。
23.(1)形状
(2)无规则运动
(3)引力
(4)变大
(1)“扎”风筝的过程,人对竹篾施加了力的作用,竹篾在力的作用下,形状发生了变化,所以说明力可以改变物体的形状;
(2)“绘”风筝的过程,闻到颜料淡淡的气味,属于扩散现象,是因为分子在不停地做无规则运动的结果;
(3)“糊”风筝的过程,胶水能将纸和框架粘住主要是因为分子间存在引力;
(4)“放”风筝的过程,风筝上升时,质量不变,高度变大,所以其重力势能变大。
(1)力可以改变物体的形状,力可以改变物体的运动状态。
(2)一切物质的分子都在不停地做无规则运动,这种无规则运动叫作分子的热运动。
(3)分子间同时存在相互作用的引力和斥力。
(4)重力势能大小与质量和高度有关。
24.摩擦;减小
(1)最新研发的人形机器人,关节处有液态润滑剂形成的润滑膜,减小了接触面的粗糙程度,在压力一定时,可减小摩擦力,使其动作更灵活;
(2)山区果农用无人机将一筐橙子从山上运往山下的过程中,这筐橙子的质量不变,高度变小,所以其重力势能减小。
(1)减小摩擦的方法:在接触面粗糙程度一定时,减小压力;在压力一定时,减小接触面的粗糙程度;使接触面脱离;用滚动代替滑动。
(2)重力势能大小的影响因素:质量、被举的高度;质量越大,高度越高,重力势能越大。
25.(1)电磁;15
(2)7200
(1)工作人员熟练操作手柄,通过电磁波无线遥控无人机,实现定点起飞。
已知无人机沿水平方向匀速直线飞行的路程s = 300m,用时t = 20s,则无人机水平飞行时的速度大小为:。
(2)消耗的电能0.25kW h = 0.25×3.6×106J = 9×105J。
已知电能转化为机械能的效率为80%,则转化的机械能W = 9×105J×80% = 7.2×105J。
无人机内电动机的机械功率为:。
(1)根据电磁波的特点和应用解答。根据计算无人机水平飞行时的速度。
(2)知道千瓦时与焦耳单位换算,电能转化为机械能的效率为80%,则转化的机械能W = 9×105J×80%,根据计算无人机内电动机的机械功率。
26.3.6;1
拉力做的功,即总功:W总=Fs=6N×0.6m=3.6J;
克服物重做的有用功:W有=Gh=10N×0.3m=3J,
忽略弹簧测力计的重力和空气阻力,克服斜面对物体的摩擦力做的功为额外功,
则额外功:W额=W总-W有=3.6J-3J=0.6J,
斜面对物体的摩擦力:。
已知拉力和斜面长,根据W=Fs求拉力做的功,即总功;根据W=Gh求有用功;忽略弹簧测力计的重力和空气阻力,克服斜面对物体的摩擦力做的功为额外功,根据W总=W有+W额可得额外功,根据W额=fs求斜面对物体的摩擦力。
27.1.2;1.5;3
(1)使用斜面做的有用功:W有=Gh=24N×0.5m=12J;
(2)滑轮组动滑轮上有3股绳,所以对重物的拉力为F=nF拉=3×5N=15N,
拉力所做的总功为:W总=Fs=15N×1m=15J;
拉力所做总功的功率为:;
(3)因W总=W有用+W额外,则额外功:W额=W总-W有用=15J-12J=3J,
由W额=fs可得物体受到的摩擦力:。
(1)利用W有=Gh求出有用功。
(2)根据W=Fs算出拉力所做的总功,根据算出拉力所做总功的功率;
(3)根据W=Gh求出有用功;根据总功与有用功的差求出额外功,再根据W额=fs变形后可求摩擦力f。
28.重力势;动;摩擦力
水从高处流下,冲击水轮机带动石磨转动,水的高度减小,重力势能变小,石磨转动,动能变大,将水的重力势能能转化为石磨的动能;石磨接触面粗糙,在压力一定时,可增大摩擦力。故第1空填:重力势;第2空填:动;第3空填:摩擦力。
质量一定时,高度减小,重力势能减小,石磨被推动,动能变大;压力一定时,接触面越粗糙,摩擦力越大。
29.1.61×105;机械;3.5×10-3
(1)汽油机工作时,首先把燃料中的化学能转化为内能,然后部分内能转化为机械能;
(2)由图知,损失的能量为:Q损失=1.2×105J,
获得的有用的机械能是W=4.1×104J,
则燃料完全燃烧释放的能量Q放=Q损失+W=1.2×105J+4.1×104J=1.61×105J,
(3)根据Q放=mq可得该工作过程中消耗的汽油质量为:
。
(1)做功冲程内燃机给汽车提供动力,此冲程中内能转化为机械能;
(2)燃料完全放出的能量一部分转化为有用的机械能,其它损失了;
(3)根据Q放=mq求出该工作过程中消耗的汽油质量。
30.0.75;3
根据,拉力F的功率为
图中滑轮为定滑轮,不计绳重及绳与滑轮间摩擦,因为弹簧测力计的示数为2N,因此A受到的水平向左的拉力为2N,B受到A水平向左的摩擦力也为2N;长木板B受到向右的拉力等于水平面的摩擦力加上A对B的摩擦力,B受到水平面的摩擦力为f=5N﹣2N=3N。
根据计算拉力F的功率;物体A与长木板B之间的摩擦力等于弹簧测力计的示数;长木板B受到向右的拉力等于水平面的摩擦力加上A对B的摩擦力,据此求B受到水平面的摩擦力。
31.上升;增大
大气压随高度的增加而减小,携带如图所示的“水气压计”向山顶攀登过程中,因为外界气压减小,所以,“水气压计”管内液面在瓶内较大气压的作用下会上升;向山顶攀登过程中,小明的质量不变,高度上升,所以重力势能会增大。
大气压随高度的增加而减小;重力势能大小的影响因素:质量、被举的高度;质量越大,高度越高,重力势能越大。
32.增大;
弹簧的弹性势能与弹幕的形变程度有关,形变程度越大,弹性势能越大。当P从A端滑至B端过程中,弹簧被压缩,形变程度增大,其弹性势能增大;
由图可知,滑动变阻器R与R0串联,电流表测电路中的电流。
当电路中的电流最大为I大=0.6A时,R接入电路的电阻最小为0Ω,
此时R0的阻值:;
当电路中的电流最小为I小=0.1A时,R接入电路的电阻最大,
此时电路的总电阻:,
根据串联电路的电阻规律可得,R接入电路的最大阻值:R=R总-R0=30Ω-5Ω=25Ω。
则R连入电路的阻值变化范围是0-25Ω。
弹簧的弹性势能与弹幕的形变程度有关,形变程度越大,弹性势能越大;
由图可知,滑动变阻器R与R0串联,电流表测电路中的电流。已知电流表示数的变化范围,根据欧姆定律可得R的最小值和最大值,即R的阻值变化范围。
33.20;75
(1)由图可知,滑轮组绳子的有效股数n=2,则绳子自由端移动的距离:s=nh=2×10m=20m;
(2)拉力F做功:W总=Fs=400N×20m=8000J;
物体的重力:G=mg=60kg×10N/kg=600N,
拉力做的有用功:W有=Gh=600N×10m=6000J,
滑轮组的机械效率:。
(1)根据图片确定滑轮组绳子的有效股数n,绳子自由端移动的距离s=nh;
(2)利用W=Fs求拉力F做的功,再利用W=Gh求拉力做的有用功,滑轮组的机械效率等于有用功与总功之比。
34.300;12
由图可知,动滑轮上的绳子段数为n=3,拉力所做的功:
W=Fs绳=Fns物=10N×3×10m=300J;
水平使用滑轮组时,克服物体所受摩擦力做的功为有用功,
根据题意可得物体受到的摩擦力:f=0.12G=0.12×100N=12N,
有用功:W有=fs物=12N×10m=120J,
滑轮组有用功的功率:。
由图可知,动滑轮上的绳子段数,根据W=Fs绳=Fns物求拉力所做的功;
水平使用滑轮组时,克服物体所受摩擦力做的功为有用功,根据题意可得物体受到的摩擦力,根据W=fs物求有用功,根据求滑轮组有用功的功率。
35.S1断开,S2接2;15
据图可知,低温档位,两个电阻串联,此时电阻最大,根据电功率公式P=可知,此时电功率最小处于低温档位,即此时S1断开,S2接2。
高温挡,电路中两电阻并联,并联的总电阻R=;中温档电路中只有R1,结合P=可知,,根据电阻的并联可知,代入数据解得R2=4.8Ω。低温档位的电阻为R‘=R2+R1=9.6Ω;根据电功率公式P=可知,总功率P=
1、并联电路电压相等、支路电流之和为干路电流,电阻为;
2、串联电路的电路规律:串联电路,电流处处相等,电源的电压为用电器电压之和,总电阻为用电器电阻之和;
3、电功率的计算:公式P=UI。
36.750;30
拉力做功W=Fs=150N×5m=750J,物体克服重力做功W=Gh=500N×1.2m=600J,功率P=
做功公式W=Fs,功分为有用功和额外功,有用功为克服重力做功,额外功主要为摩擦力作用;
功率的计算:公式为W=Pt。
37.做功;不是
举重运动员将杠铃举起的过程中,举重运动员对杠铃有力的作用,杠铃在力的方向上移动了距离,所以举重运动员对杠铃做了功;
举重运动员举起杠铃静止时,地面对运动员的支持力等于运动员与杠铃的总重力,要大于举重运动员的重力,两个力大小不相等,故地面对运动员的支持力与运动员的重力不是一对平衡力。
故答案为:做功;不是。
(1)力对物体做功的两个条件:作用在物体上的力;物体沿力的方向通过的距离。两个条件缺一不可;
(2)二力平衡的条件:大小相等、方向相反、作用在同一直线上、作用在同一物体上。
38.(1)运动
(2)1.2
(3)1.4
(1) 无人机上升时,无人机和地面的运动状态不同,所以二者相对运动;
(2) 无人机载着空货箱竖直匀速上升36m用时30s,速度为;
(3)据题分析可知,放入货物后,其速度为,,解得G物=14N,根据重力公式计算质量为m=。
1、物体相对运动:物体与参照物运动状态不一致,所以物体相对参照物运动,物体与参照物运动状态不一致,所以物体相对参照物静止;
2、速度的计算:v=s/t,相同时间下物体的路程大,则速度大,相同路程下,物体的时间小速度大,当速度一定时,时间越长通过的路程越长,
3、功率的计算:公式为P=Fv。
39.(1)静止;增大
(2)8;惯性
(1)滑板和人的运动状态相同,所以二者相对静止,加速下滑,速度增加,动能增加;
(2)游客的下滑速度, 滑到底端时 ,游客具有惯性,不能立刻停下。
1、惯性是物体的基本属性,只有物体重力有关,当物体速度发生变化时,由于惯性物体保持原来运动状态的属性,利用惯性的实例:运动员助跑起跳,乘车系安全带可以降低司机惯性带来的伤害,惯性不是力,不能用受到惯性、惯性力的作用进行表述;
2、根据速度的公式计算分析,速度公式为v=s/t,根据题目中所给的信息,如已知速度时间求解路程,或者已知路程和时间求解速度,匀速运动的特点,在st曲线上为一条倾斜向上的直线,在vt曲线为一条水平直线。
3、物体相对运动:物体与参照物运动状态不一致,所以物体相对参照物运动,物体与参照物运动状态不一致,所以物体相对参照物静止。
40.(1)
(2)左
(3)0.75
(4)电压
(1)图甲中电流表还没有接入电路,且电流表要串联在电路中,如下图所示:
(2)正确连接好电路,闭合开关前,应将滑动变阻器的滑片P移到阻值最大处,即最左端。
(3)闭合开关后,移动滑片P,观察到电压表的示数为2.5V时,电流表的示数如图乙所示,电流表选用小量程,分度值为0.02A,则此时电流为0.3A,
小灯泡的额定功率为:P额=U额I额=2.5V×0.3A=0.75W;
(4)进行相同实验的另一同学,检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,电压表通过变阻器与电源连通,此时电压表测电源电压,所以会观察到电压表的指针有明显偏转;电压表串联在电路中,且电压表自身的电阻很大,所以电路中的电流几乎为零,即电流表的指针几乎不偏转。
(1)电流表要串联在电路中;
(2)闭合开关前,为保护电路,应将滑动变阻器的滑片P移到阻值最大处;
(3)图乙中电流表选用小量程,根据电流表的分度值和指针位置读出其示数,根据P=UI求出小灯泡的额定功率;
(4)检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,电压表通过变阻器与电源连通,此时电压表测电源电压,且电压表自身的电阻很大,据此分析。
41.(1)秒表;甲、丁;c;甲
(2)乙;=
(3)丙
(1)停表可以测量时间;
研究该时间与屋顶材料的关系, 变量为屋顶材料,其余因素相同,所以选择甲丁实验;据图像分析可知,C图像在d上面,即相同时间下,c经过的路程大,所以c图像的平均速度大于d;据图可知,甲的路线比乙短,所以经过甲的速度大;
(2)据表格分析可知,乙实验下,钢柱落地的距离大,所以 对墙体保护更好 ;不计阻力,初始状态下机械能相同,没有额外功,所以机械能守恒,末状态重力势能相同,动能也相同;
(3)据图可知,甲乙被屋顶挡住的光线多,丙挡住的光线小,所以 ,阳光能够照射到房间内距离最远的是 丙。
机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比;
根据速度的公式计算分析,速度公式为v=s/t,根据题目中所给的信息,如已知速度时间求解路程,或者已知路程和时间求解速度;
控制变量法:在物理实验中,存在多个影响因素共同决定某个物理量,在研究单一变量对试验结果的影响时,要保持非研究因素的相同。
42.(1)毛巾
(2)初速度
(3)远;匀速直线
(4)不同;减小小球在斜面上的高度
(1)实验前,小明同学用大小相同的力将手分别压在毛巾和木板表面上,并向前滑动,由于压力相同,毛巾更粗糙,所以在此过程中小明感到毛巾对手的运动的阻碍作用较大些。
(2)实验时将同一辆小车从同一个斜面上的同一高度处,由静止开始滑下,他这样操作的目的是为了使小车运动到水平面时具有相同的初速度。
(3)当小车受到的阻力越小,则小车运动的距离就越远。由此可进一步推理得出:若运动的小车不受阻力,它的速度就不会减小,将会一直做匀速直线运动。
(4)小明还想探究物体的动能大小与物体速度的关系,需要控制质量相同,改变速度大小,将一个小钢球分别放在同一斜面上的不同高度处,由静止滑下,撞击放在水平桌面上的木块,比较木块移动的距离。当他将小钢球放在斜面上较高处实验时,发现小球撞击木块后,木块直接冲出水平桌面,由此可知小球的动能过大,为避免这种现象发生,应减小小球的动能大小,在质量不变时,减小小球的速度,故较合理的改进建议:减小小球在斜面上的高度。
故答案为:(1)毛巾;(2)初速度;(3)远;匀速直线;(4)不同;减小小球在斜面上的高度。
(1)在压力相同时,接触面越粗糙滑动摩擦力越大;
(2)根据控制变量法可知,让小车从斜面的同一位置静止释放的目的是控制小车下滑到水平面的速度相同;
(3)根据图1的实验现象分析回答;
(4)动能大小与质量和速度有关,研究与其中一个因素的关系时,要控制另外一个因素不变;发现小球撞击木块后,木块直接冲出水平桌面,可知小球的动能过大,为避免这种现象发生,根据影响动能大小的因素分析。
43.(1)解: 无人机转载货物后的总重力为G=G无人机+G货=300N+200N=500N
无人机转载货物后对水平地面的压强。、
(2)解: 无人机匀速上升过程对货物做的功W=G货h=200N×100m=2×104J
(1)静止在水平地面上时对地面的压力等于总重力,根据算出它对地面的压强;
(2)根据匀速上升时升力等于重力,根据W=Gh计算做功。
44.(1)解: 飞机在0.5h内通过的路程
(2)解: ;
飞机在0.5h内水平方向牵引力做的功
;
(3)解: 当速度达到时,飞机即将离地起飞,,可得;
当飞机以速度滑行时;
飞机在水平跑道上滑行,竖直方向上受力平衡,
所以。
(1)已知飞机的飞行速度和时间,根据s=vt得出飞机在上述0.5h内通过的路程。
(2)根据W=Fs得出飞机在上述0.5h内水平方向牵引力做的功。
(3)当速度达到v1时,飞机即将离地起飞,此时飞机所受升力与重力相等,结合F=kv2得出飞机在跑道上滑行速度为0.5v1时飞机获得的升力,由力的平衡得出飞机在跑道上滑行速度为0.5v1时受到的支持力大小。
45.(1)解:货箱的速度:。
(2)解:货箱匀速竖直提升时处于平衡状态,
则支持力;
叉车对货箱所做的功:。
(3)解: 叉车对货箱所做功的功率:。
(1)已知货箱上升的高度和时间,根据求货箱的速度;
(2)叉车克服货箱的重力做功,根据W=Gh=mgh求叉车对货箱所做的功;
(3)根据求叉车对货箱所做功的功率。
46.(1)解: 容器底部受到的压强
(2)解: A处于漂浮状态,A受到的浮力
由得A排开水的体积
A漂浮时浸入水中的深度
(3)解: A、B悬浮时,受到总浮力
B受到的重力
B开始运动时,A上表面与B下表面重合,距容器底距离
A、B刚好浸没时,液面上升的高度
B刚好浸没时,下表面距容器底的距离
B开始运动到刚好浸没时运动的距离
B的重力做功
(1)根据p=ρ液gh求容器底部受到水的压强;
(2)根据物体的漂浮条件求出A漂浮时受到的浮力,根据F浮=ρ液gV排求出此时A排开水的体积,根据V=Sh求出此时A浸入水中的深度;
(3)当AB悬浮时,将二者的体积相加得到排开水的总体积,然后根据阿基米德原理计算此时它们受到的浮力,接下来减去A的重力计算出B的重力。
B开始运动时,A上表面与B下表面重合, 计算出距离容器底部的距离和液面上升的高度。再计算出B刚好浸没时下表面到容器底部的距离,进而计算出B从开始运动到刚好浸没通过的距离,最后根据W=Gh计算B的重力做功即可。
47.(1)解:由图可知开关S1、S2同时接1,电动机中电流方向为从右到左;开关S1、S2同时接2,电动机中电流方向为从左到右;所以通过控制开关S1、S2,改变通过电动机中电流的方向可实现前进、后退。
(2)解: 电动机正常工作5min消耗的电能
电动机正常工作电流为
产生的热量为
(3)解: 灯泡正常工作的电流为
则电路中最大电流为0.3A,由题意可知电动机正常工作,则电源电压为24V,根据欧姆定律和串联电路特点可知此时R连入电路的最小阻值为
(1)由图可知开关S1、S2同时接2,电动机中电流方向为从左到右,开关S1、S2同时接1,电动机中电流方向为从右到左;控制开关S1、S2,改变通过电动机中电流的方向实现前进、后退。
(2)根据W=Pt计算 电动机正常工作5min消耗的电能,结合电功率公式P=UI计算电动机正常工作电流;结合焦耳定律计算产生的热量;
(3) 灯泡L(18V 5.4W) ,结合P=UI计算灯泡正常工作的电流;电动机正常工作,根据并联电路电压规律分析可知,电源电压为24V,根据U=IR以及串联电路电压规律计算R连入电路的最小阻值。
48.(1)A;D
(2)由于题意可知,当感应区上受到的压力F=300N时,衔铁被电磁铁吸引转换触点,此时电流即为感应装置中电磁铁的临界值。由乙图可知,当压力F=300N时,电阻R=70Ω,且与R1串联,根据欧姆定律可知电流的临界值为
重力更小的人,压力更小,由图乙可知,R更大,保持电磁铁电流临界值不变,根据可知,可减小滑动变阻器R1接入的阻值。
(3)处于柔光状态工作时,加装的灯泡L与灯泡L0串联,又两灯泡规格相同,根据串联电路电压规律可知,每个灯泡两端的实际电压为110V,由于灯丝电阻不变,所以有
灯泡的实际功率为
L与L0串联的总功率P总=2P实=2×25W=50W
每天节省的电能为W=(ΔP额-P总)t=(100W-50W)×8×3.6×103s=1.44×105J
30天节约的电能为W总=30×1.44×105J=4.32×106J
(4)推力F既克服重力做有用功,又要克服摩擦力做额外功,所以推力做的功等于有用功和额外功之和,所做的有用功为W有用=Gh=200N×20m×sin(90°-60°)=2000J
摩擦力大小为f=0.05G=0.05×200N=10N
克服摩擦力所做的额外功为W额外=fs=10N×20N=200J
所以推力F做功为W=W有用+W额外=2000J+200J=2200J
(1)当人走进压力感应区时,压力增大,由乙图可知,电阻R的阻值变小,控制电路的总电阻变小,根据可知,电压一定是,电流变大,电磁铁磁性增强,动触点被吸到右边静触点与B接触,此时只有L0接入电路,灯光亮,故灯泡L接在电路中A处。
根据安全用电的要求,开关应接在火线的用电器之间,所以工作电路的导线D端应接火线。
(1)当人走进压力感应区时,压力增大,控制电路的总电阻变小,根据欧姆定律知电流变大,电磁铁磁性增强,根据衔铁的位置变化以及对应的工作状态分析灯泡L的位置即可。开关应接在火线的用电器之间;
(2)根据压力大小确定R大小,根欧姆定律和串联电路的特点计算电流;根据吸引的电流不变,结合压力减小时R的变化分析;
(3)由可得串联的总功率,根据两个灯泡串联的电功率和一个正常工作的电功率结合时间计算电能;
(4)根据推力需要克服摩擦力做功,同时提升物体做功,计算总的功。
21世纪教育网(www.21cnjy.com)
一、选择题
1.(2025·长沙) 在紧急救援时,可用充氦浮空器将发电机组升至高空发电,为现场提供照明和通信。当浮空器匀速升空时,它的( )
A.动能增大 B.动能减小
C.重力势能增大 D.机械能减小
2.(2025·陕西)如图,是我国为满足森林灭火和水上救援等迫切需求而研制的大型水陆两栖飞机“鲲龙”AG600。工作时,它可在20秒内吸水12吨,并在4秒内倾泻完毕,能实现水源与火场之间多次往返。下列关于“鲲龙”的说法正确的是( )
A.停在水面上不工作时,处于平衡状态
B.停在水面上吸水过程中,下表面受到水的压强不变
C.在空中水平匀速飞行时,机翼上方空气流速大,压强大
D.降落过程中,重力势能不变
3.(2025·陕西)周末,小明在家进行大扫除,如图所示为小明竖直向上施力抬起沙发时的情景。已知沙发的质量为50,沙发的重心在其中心位置,重心上升的高度为20,g取10。下列说法正确的是
A.沙发扶手的高度约为50
B.小明抬沙发时,沙发相当于一个费力杠杆
C.在图示位置静止时,小明对沙发的力为250N
D.小明对沙发做的功为200J
4.(2025·陕西)2025年5月5日,我国台球运动员赵心童以18:12战胜对手,成为第一位夺得斯诺克世锦赛冠军的亚洲球员,如图所示为其打球的瞬间。下列说法正确的是
A.击球时,球杆对台球有作用力,台球对球杆没有作用力
B.击球后台球运动,说明力可以改变物体的运动状态
C.台球在滚动的过程中惯性越来越小
D.台球在减速滚动的过程中机械能保持不变
5.(2025·湖北)如图是我国古代水力鼓风机示意图。水轮驱动装置推动杆压缩皮囊(音tuo,口袋)送风,带动连接杆的绳拉弯竹子,随后竹子恢复原状带动皮囊张开吸气。下列说法错误的是
A.绳对竹子的拉力改变了竹子的形状
B.送风时竹子的弹性势能增大
C.送风时杆对皮不做功
D.竹子恢复过程弹力减小
6.(2025·湖南) 如图,这是小静设计的一款无需电池和燃料的无碳小车。在重物下落驱动无碳小车运动的过程中,下列说法正确的是( )
A.顶部的定滑轮可以省力
B.机械效率可达到100%
C.主要是利用重力势能转化为动能
D.给车轮轴承加润滑油可以增大摩擦力
7.(2025·乐山) 为响应国家“每日体育锻炼时间不低于两小时”的要求,某校组织学生远足爬山,开展户外运动。爬山区域等高线如图所示,不考虑重力变化,队伍重力势能最大的位置是( )
A.A处 B.B处 C.C处 D.D处
8.(2025·苏州) 如图所示,“龙水车"是我国古代主要的提水设施之一。水车一端浸人水中,另一端固定于岸上。使用时,人踩动长柄摇杆末端的踏板使大轮转动,带动嵌满刮水板的链条匀速运动,槽内板片刮水上行,倾灌于地势较高的田中。下列说法正确的是
A.长柄摇杆越长,踩动时越费力
B.踩得越快,提水做功越多
C.提水过程中,随板片上行的水重力势能减小
D.减小水车各部件间的摩擦,提水效率增大
9.(2025·凉山) 甲、乙两车同时同地在水平路面上向北沿直线行驶,它们的s-t图像如图所示。已知甲车总重,若甲车0~8s内的牵引力大小恒为,则( )
A.乙车速度大小为10m/s
B.0~6s内,以甲车为参照物,乙车向北运动
C.0~6s内,甲车重力做功为
D.0~6s内,甲车牵引力功率为
10.(2025·凉山) 对生活中有关物理量的估测,符合实际的是( )
A.洗热水澡时的水温约为80℃
B.中学物理课本宽约为18cm
C.教室内饮水机加热时的功率约为5W
D.初中生从一楼走到五楼的时间约为3s
11.(2025·烟台) 1970年4月24日,我国自行设计制造的第一颗人造地球卫星“东方红一号”发射成功,向地面传回优美的《东方红》乐曲,开创了我国航天事业的新纪元,目前“东方红一号”依然沿椭圆形轨道绕地球运行。下列有关说法正确的是( )
A.《东方红》乐曲通过电磁波传到地面上
B.以地球为参照物,东方红一号是静止的
C.东方红一号在运行过程中惯性消失
D.东方红一号在远地点时重力势能最小
12.(2025·广安)2025年5月21日,我国“力箭一号”遥七运载火箭将6颗卫星顺利送入预定轨道,此次任务是该型号运载火箭第7次飞行。如图是火箭发射时的情景,下列说法正确的是( )
A.火箭加速升空过程中,力改变了火箭的运动状态
B.火箭加速升空过程中,卫星相对于火箭是运动的
C.火箭以氢为燃料,是因为氢的热值小
D.火箭加速升空过程中,卫星的动能不变,重力势能增大
13.(2025·云南) 《天工开物》中记载了我国古代井上施工装置,其简化模型如图所示,O为支点,,M端用绳子悬挂重200N的物体,在N端用竖直向下的拉力在1s内使物体缓慢上升了0.5m,忽略杠杆和绳的自重,下列说法正确的是( )
A.该杠杆是费力杠杆
B.杠杆在水平位置平衡时N端受到的拉力大小为400N
C.M端绳子拉力对物体做功为100J
D.M端绳子拉力对物体做功的功率为50W
14.(2025·成都) “嫦娥六号”月球探测器经近月制动减速进入环月轨道,于2024年6月2日成功着陆月球背面,实现人类首次在月球背面采样。下列说法正确的是( )
A.探测器减速过程中动能减小 B.探测器着陆月球后惯性消失
C.月球上的探测器相对地球静止 D.月壤样品带回地球后质量变大
15.(2025·自贡) 如图,质量为60kg的工人将重为500N的彩灯组件竖直向上匀速提升了6m,用时12s,绳子自由端拉力为300N。不计绳重和摩擦,g取10N/kg。下列说法正确的是( )
A.拉力的功率是150W
B.绳子末端移动的速度是
C.滑轮组的机械效率是
D.若工人的脚与地面接触的总面积为,则他对地面的压强是
16.(2025·自贡) 如图,“神舟十九号”返回舱打开降落伞后,在竖直匀速下落过程中,下列有关返回舱的说法正确的是( )
A.重力势能减小 B.动能增大
C.重力势能转化为动能 D.机械能守恒
17.(2025·重庆市) 乒乓球是我国全民喜爱的体育项目。下列说法正确的是( )
A.球拍面上的橡胶是导体
B.乒乓球从桌上弹起上升过程重力势能减小
C.新球拍有橡胶味说明分子在不停地做无规则运动
D.乒乓球被击出后继续运动是因为受到惯性的作用
18.(2025·南充)新学期,老师组织同学们进行了一场有意义的劳动——搬新书,在下列过程中,同学们对书不做功的是
A.甲图中将书从地面提起的过程 B.乙图中在水平路面推车的过程
C.丙图中将书搬上教学楼的过程 D.丁图中将书堆放在桌面的过程
19.(2025·南充)近年来,我国科技取得了巨大成就,下列分析不合理的是
A.四川舰上的电磁弹射系统工作原理与电动机相同
B.人形机器人对舞台的压力大小等于地面对它的支持力大小
C.运-20大型运输机获得的升力利用了流体压强与流速的关系
D.天宫二号由近地点向远地点运动时重力势能减小,动能增加
20.(2024·连云港) 2024年4月25日,我国长征运载火箭成功将神舟十八号载人飞船送往预定轨道。载人飞船离开地面加速上升的过程中( )
A.动能增大,重力势能不变 B.动能增大,重力势能增大
C.动能不变,重力势能不变 D.动能不变,重力势能增大
21.(2025·黑龙江) 如图,2025年4月19日,我国在太原卫星发射中心使用长征六号改运载火箭成功将试验二十七号卫星01星﹣06星发射。有关发射的描述正确的是( )
A.发射前,以发射塔为参照物,运载火箭是运动的
B.发射时,发射塔周围出现大量“白气”是升华现象
C.加速升空过程中,卫星的动能转化为重力势能
D.加速升空过程中,卫星的机械能增大
二、填空题
22.(2025·绥化) 哈尔滨冰雪大世界的超长大滑梯是人们喜爱的冰雪项目。当游客滑下时,他的重力势能 (选填“变大”“变小”或“不变”);以游客为参照物,地面是 (选填“运动”或“静止”)的。
23.(2025·山东) 山东潍坊风筝是国家级非物质文化遗产之一,其制作主要经过“扎”“绘”“糊”“放”等过程。
(1)“扎”的过程,用力将竹篾弯折,说明力可以改变物体的 ;
(2)“绘”的过程,闻到颜料淡淡的气味,是因为分子在不停地做 ;
(3)“糊”的过程,胶水能将纸和框架粘住主要是因为分子间存在 ;
(4)“放”的过程,风筝上升时,其重力势能 (选填“变大”“变小”或“不变”)。
24.(2025·天津市)我国大力发展新质生产力。最新研发的人形机器人,关节处有液态润滑剂形成的润滑膜,可减小 ,使其动作更灵活;山区果农用无人机将一筐橙子从山上运往山下的过程中,这筐橙子的重力势能 (选填“增大”“减小”或“不变”)。
25.(2025·湖南) 科技赋能乡村振兴,农业无人机以其安全可靠、高效灵活、成本低廉的优势而广泛应用。图是无人机正在喷洒农药的场景。
(1)工作人员熟练操作手柄,通过 波无线遥控无人机,实现定点起飞。无人机沿水平方向匀速直线飞行300m,用时20s,则无人机水平飞行时的速度大小为 m/s。
(2)装载农药的无人机水平匀速直线飞行100s,消耗的电能为0.25kW·h,若该无人机消耗的电能转化为机械能的效率为80%,则此过程中无人机内电动机的机械功率为 W。
26.(2025·乐山) 如图所示,在斜面上将一个重10N的物体匀速拉到高处,沿斜面向上的拉力,斜面长、高,则拉力所做的功为 J;把重物直接提升h所做的功作为有用功,忽略弹簧测力计的重力和空气阻力,则斜面对物体的摩擦力为 N。
27.(2025·泸州)小兴学习了简单机械后,设计了如图所示的装置,粗糙斜面长1m、高0.5m,滑轮组位于斜面顶端,不计绳重、滑轮重、滑轮的摩擦,各段绳子均与斜面平行。她把重为24N的物体从斜面底端匀速拉到顶端,用时10s,弹膏测力计示数为5N, 则对物体做的有用功为 J.绳子末拉力做功功率为 W,物体受到斜面的摩擦力大小为 N
28.(2025·扬州)如图是《天工开物》记载的我国古人磨面的场景.水从高处流下来, 能转化为 能,冲击水轮机带动石磨转动.石磨接触面粗糙,是为了增大 .
29.(2025·烟台) 汽油机是燃油汽车的动力来源之一。如图所示是某台汽油机工作时的能量数据,图中横线处应填写的内容是:① ② 。若汽油的热值为,则该工作过程中消耗的汽油质量为 kg。
30.(2025·达州) “奇思妙想”小组组装了如图所示装置,测量滑动摩擦力大小。长木板B置于水平面,在水平拉力作用下向右做匀速直线运动,速度为0.15m/s,弹簧测力计的示数为2N。拉力F的功率为 W,B受到水平面的摩擦力为 N(不计绳重及绳与滑轮间摩擦、弹簧测力计始终保持竖直状态)。
31.(2025·达州) 周末,小明陪同爸爸到“八台山”旅游,携带如图所示的“水气压计”向山顶攀登过程中,“水气压计”管内液面会 (选填“上升”、“下降”或“不变”);小明的重力势能会 (选填“增大”、“减小”或“不变”)。
32.(2025·自贡) 如图为初中体育均衡检测中握力计的工作原理简图,电源电压恒为3V,R的阻值大小与其连入电路的长度成正比,R0为保护电阻,弹簧电阻不计。握力F为零时,P在A端;握力F最大时,P在B端。P从A端滑至B端过程中,弹簧的弹性势能将 (选填“减小”“增大”或“不变”)。电路中电流表的变化范围是0.1-0.6A,R连入电路的阻值变化范围是 。
33.(2025·重庆市) 在老旧小区改造中,工人用如图所示的装置把质量为的材料从地面竖直匀速提高,则绳子自由端移动的距离是 ,若拉力为,这个装置的机械效率是 %。
34.(2025·南充)如图所示,重为100N 的物体在水平拉力F为10N 的作用下,沿水平面向左做匀速直线运动,物体受到水平地面的摩擦力是其重力的0.12倍,若物体在10s内向左移动了 10m,则拉力所做的功为 J,滑轮组有用功的功率为 W。
35.(2025·威海) 某汽车加热坐椅的工作原理如图所示,R1、R2均为发热电阻,通过控制开关通断,实现高、中、低三挡加热功能,其中高、中档位的电功率分别为60W、30W,电源电压为12V。处于低档位时开关的通断情况为 ,此时电路消耗的总功率为 W。
36.(2025·威海) 如图所示,用150N的推力沿斜面向上将重为500N的小车从斜面(高1.2m,长5m)底端匀速推到顶端,用时20s。则推力做功为 J,有用功的功率为 W。
37.(2025·黑龙江) 如图所示,举重运动员将杠铃举起的过程中,举重运动员对杠铃 (填“做功”或“没做功”);当举重运动员将杠铃高高举起后保持静止时,地面对举重运动员的支持力与举重运动员受到的重力 (填“是”或“不是”)一对平衡力。
38.(2025·长沙) 无人机送快递为市民的生活带来了极大的便利。在某次取货途中,无人机载着空货箱竖直匀速上升36m用时30s。不计空气阻力,g取10N/kg。
(1)无人机上升时,以地面为参照物,它是 的;
(2)无人机竖直匀速上升时的速度为 m/s;
(3)在取货点,工作人员将快递放入货箱,无人机再次升空,竖直匀速上升30m用时30s。已知无人机配备的货箱质量为1kg,取货前后两次匀速升空过程中无人机对货箱拉力做功的功率之比为1∶2,放入货箱的快递质量为 kg。
39.(2025·吉林) 冰雪“出圈”,文化“出彩”,大美吉林的地域文化,为全国各地的游客带来了别具一格的体验。
(1)精彩纷呈的冰雪实景戏曲秀中,一位身着京剧戏服的小伙在雪道上飞驰。以他使用的滑雪板为参照物,小伙是 的,在加速下滑的过程中其动能 。
(2)游客沿着长度为200m的冰雪大滑梯滑下,历时25s,游客下滑的平均速度是 m/s,滑到底端时游客不能立刻停下,是因为游客具有 。
三、实验探究题
40.(2025·湖南) 小霞用如图甲所示的器材测量小灯泡的额定功率。已知电源电压为3V且保持不变。小灯泡额定电压为2.5V。
(1)请你用笔画线代替导线,将图甲中的实物图连接完整,要求导线不得交叉 ;
(2)正确连接好电路,闭合开关前,应将滑动变阻器的滑片P移到最 端;
(3)闭合开关后,移动滑片P,观察到电压表的示数为2.5V时,电流表的示数如图乙所示,则小灯泡的额定功率为 W;
(4)进行相同实验的另一同学,检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,此时观察到 表的指针有明显偏转。
41.(2025·威海) 如图1所示,我国部分古代建筑屋顶采用弧线型设计,“如鸟斯革,如翚斯飞”。屋顶为什么这样设计?某兴趣小组通过实验进行探究。
根据经验,雨水流过屋顶的时间越短,防雨效果越好,为此他们首先进行了实验一。
实验一:探究雨滴经过屋顶的时间与哪些因素有关
(1)猜想:影响雨滴流过屋顶(高度、宽度均相同)时间的因素可能为:雨滴在屋顶运动的初始位置、屋顶材料、屋顶形状(雨滴与屋顶碰撞之后的速度近似为零,他们认为可不用研究雨滴初始速度这一因素)
设计实验方案:
请写出1个测量时间的工具: 。
图2所示5个实验:用钢珠代替雨滴,将相同钢珠从屋顶不同位置静止释放,记录钢珠经过屋顶的时间。若研究该时间与屋顶材料的关系,应选择实验 进行研究。
测量与分析:
用传感器获得图2甲、乙中钢珠从屋顶顶端滑到底端完整的路程s和时间t实验数据,画出s-t关系如图3所示,其中图像 (选填“c”“d”)表示钢珠运动的平均速度较大;钢珠滑过屋顶 (选填“甲”“乙”)的时间较短。
(2)实验二:探究下雨时不同屋顶对墙体的保护能力
如图3所示,甲、乙、丙是下方墙体相同、屋顶的材料相同但形状不同的三个建筑。将代替雨滴的相同钢珠分别在甲、乙屋顶顶端静止滑下落到水平地面,测量落地点到墙的距离s1、s2,数据如表2所示。
表2
实验次数 距离/cm
s1 s2
1 45 56
2 43 59
3 44 58
根据表2推测:为防止雨水落地时飞溅打湿墙体,下雨时 对墙体保护更好(选填“甲”“乙”)。若不计一切阻力,甲图中钢珠落地时的动能 乙图中钢珠落地时的动能(选填“<”“=”“>”)。
实验三:探究不同屋顶对建筑采光的影响
(3)图3甲、乙、丙三个建筑右侧墙体均安装大型窗户,某时刻阳光方向如图所示,阳光能够照射到房间内距离最远的是 (选填“甲”“乙”“丙”)。
42.(2025·黑龙江) 如图1,这是小明同学做“探究阻力对物体运动的影响”的实验装置。
(1)实验前,小明同学用大小相同的力将手分别压在毛巾和木板表面上,并向前滑动,在此过程中小明感到 (填“毛巾”或“木板”)对手的运动的阻碍作用较大些。
(2)小明打算实验时将同一辆小车从同一个斜面上的同一高度处,由静止开始滑下,他这样操作的目的是为了使小车运动到水平面时具有相同的 。
(3)实验时,让小车从斜面上由静止滑下,观察小车在毛巾和木板表面上滑行的距离。小明同学发现:当小车受到的阻力越小,则小车运动的距离就越 。由此可进一步推理得出:若运动的小车不受阻力,它将会一直做 运动。
(4)小明还想探究物体的动能大小与物体速度的关系,他进行了如图2甲、乙所示的实验。他将一个小钢球分别放在同一斜面上的 (填“相同”或“不同”)高度处,由静止滑下,撞击放在水平桌面上的木块,比较木块移动的距离。当他将小钢球放在斜面上较高处实验时,发现小球撞击木块后,木块直接冲出水平桌面,为避免这种现象发生,请你为小明同学提出一条较合理的改进建议: 。
四、计算题
43.(2025·山东) 为了促进低空经济高质量发展,山东省多个城市正在积极构建无人机智慧物流体系。如图所示,自重300N的无人机装载重200N的货物后停在水平地面上,与地面的总接触面积为0.01m2,无人机运送货物过程中,达到限定速度后,匀速上升100m,接近限定高度。求:
(1)无人机转载货物后对水平地面的压强;
(2)无人机匀速上升过程对货物做的功。
44.(2025·福建) 运-20是我国自主研制的重型运输机,如图。飞机获得的升力与其在平直跑道上滑行速度v的平方成正比,即,为定值(未知)。飞机在平直跑道上从静止开始加速,当速度达到时,飞机即将离地起飞,此时飞机所受升力与重力相等。升空后,飞机若以速度800km/h沿水平直线匀速飞行0.5h,其发动机在水平方向的牵引力大小为。
(1)求升空后飞机在上述0.5h内通过的路程。
(2)求升空后飞机在上述0.5h内水平方向牵引力做的功。
(3)已知飞机重力为,求飞机在跑道上滑行速度为时受到的支持力。
45.(2025·苏州)叉车常用于货物的转运,如图所示。叉车在10s内将质量为 300kg 的货箱匀速竖直提升3m,g 取 ION/kg。求此过程中:
(1)货箱的速度;
(2)叉车对货箱所做的功;
(3)叉车对货箱所做功的功率。
46.(2025·广安)某同学看了我国航空母舰发展简介后对力学产生了浓厚的兴趣。他用底面积为的长方体容器(厚度不计)装一定量的水,将一个重为4N,边长为10cm的正方体A放入容器中处于漂浮状态。如图所示,此时水的深度为18cm。(,g取10N/kg)求:
(1)容器底部受到水的压强;
(2)A漂浮时浸入水中的深度;
(3)若将与A形状体积完全相同的物体B平放在A的正上方,A、B一起向下运动,当静止时一起处于悬浮状态。求A、B一起开始运动到B刚好浸没时,B的重力做的功。(容器足够高,水不溢出,A、B不吸水)
47.(2025·威海) 采摘机器人在智慧农业中广泛使用,兴趣小组设计的某采摘机器人部分工作原 理如图所示,可以“前进”“后退”“照明”;开关S1、S2用绝缘柄相连,可同时连接触点“1”或“2”,电动机均正常工作。部分元件参数:电动机(24V 96W),灯泡L(18V 5.4W),滑动变阻器R(50Ω 1A),电流表(0~0.6A)。
(1)通过控制开关S1、S2,可实现前进、后退,原因是什么?
(2)电动机(线圈电阻为2Ω)正常工作5min消耗的电能和产生的热量分别为多少?
(3)闭合S3,调节灯泡亮度时,为保证各元件安全,R连入电路的最小阻值为多少?(灯丝电阻随温度变化忽略不计)
五、综合题
48.(2025·烟台) 为了节约电能又不影响照明,工人师傅设计出一个路灯改造方案。此前,每个路灯装有一只“220V 100W”的灯泡L0。此次改造要为每个路灯加装一只相同规格的灯泡L,并安装一个电磁控制感应装置,当夜幕降临时,光控开关闭合,路灯处于低功率的柔光状态;当行人走进感应区时,灯光瞬间变亮,离开感应区时,路灯又恢复原来的柔光状态。图甲是设计的电路(加装的灯泡L未画出),控制电路的电源电压恒为4.5V,压敏电阻R的阻值随压力大小变化的图像如图乙所示,当通过电磁铁的电流等于或大于临界值时,衔铁会被电磁铁吸引而转换触点。工作电路的电源电压220V不变,不考虑灯丝电阻变化,电磁铁线圈电阻忽略不计。
(1)为达到改造要求,工人师傅需要将灯泡L接在电路中 (选填“A”或“B”)处。从安全用电角度考虑,工作电路的导线 (选填“C”或“D”)端应接火线。
(2)若控制电路中R1接入的阻值为55Ω,当感应区上受到的压力时,衔铁被电磁铁吸引转换触点,则感应装置中电磁铁的电流临界值是多少?保持电磁铁电流临界值不变,要想让重力更小的人经过感应区时路灯变亮,写出一种可行的改进办法。
(3)若某路灯每天工作总时间为10h,处于柔光状态的时间累计为8h,求改造后这个路灯在六月份(30天)节约的电能(控制电路消耗的电能忽略不计)。
(4)如图丙所示,在方案实施过程中,工人师傅改装完某处的路灯后,需要把重为200N的材料车沿倾斜路面推至下一路灯处,M、N是途经的两点。已知MN两点间的距离为20m,竖直的灯杆与路面夹角为,材料车受到的摩擦力大小是其重力的0.05倍。假设推力F的方向始终与倾斜路面平行,求工人师傅将材料车从M点匀速推至N点的过程中推力F做的功。
答案解析部分
1.C
当浮空器匀速升空时 ,速度不变,质量不变,高度增加,所以动能不变,重力势能增加,机械能增加,C正确,ABD错误;
综上选C。
机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比。
2.A
A、飞机停在水面上,保持静止,根据二力平衡可知,此时物体处于平衡状态,故A正确;
B、 停在水面上吸水过程中 重力变大,浸没在水中的深度变大,根据压强公式分析可知压强变大,故B错误;
C、 机翼上方空气流速大,压强小,故C错误;
D、 降落过程中, 飞机高度下降,重力不变,所以重力势能减小,故D错误。
综上选A。
1、机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比;
2、力和运动:物体静止或者做匀速直线运动,物体受到平衡力的作用;
3、压强和流速的关系:压强越大,流速越小,应用为飞机机翼上凸,空气流速快,导致压强较小,形成向上的升力;
4、压强的计算:公式为P=ρgh,压强和液体的密度、浸没深度有关,且密度越大,压强越大,深度越大,压强越大, 在同种液体的同一深度,液体向各个方向的压强 相同。
3.C
A、沙发扶手的高度约为人高度的一般,大致为50-60cm,故A错误;
B、抬起沙发时,沙发的重心和支点的距离即为阻力臂,小于动力臂,所以阻力大于动力,属于省力杠杆,故B错误;
C、根据杠杆平衡可知,F×L1=G×L2,L1=2L2,所以F=0.5G=250N,故C正确;
D、根据相似三角形可知,手运动的距离为重心距离的二倍,根据W=Fh计算可知,沙发做功W=250N×0.4m=1000J。故D错误。
综上选C。
1、杠杆原理的应用:杠杆的平衡条件为:动力*动力臂=阻力*阻力臂;;
2、做功:公式为W=Fs,其中s是沿着力的方向移动的距离。
4.B
A、 击球时,球杆对台球有作用力, 根据力作用的相互性可知, 台球对球杆有作用力,故A错误;
B、 击球后台球运动 ,力使得台球的运动状态发生变化,故B正确;
C、惯性和速度无关,和质量有关,质量不变,惯性不变,故C错误;
D、减速过程中,速度减小,质量不变,高度不变,所以动能减小,重力势能不变,所以机械能减小,故D错误。
综上选B。
1、相互作用力:作用力是相互的,施力物体也是受力物体。特点为大小相等、方向相反、作用在两个物体上;
2、力的作用效果:力会使物体的运动状态和物体形状发生改变;
3、惯性是物体的基本属性,只有物体重力有关,当物体速度发生变化时,由于惯性物体保持原来运动状态的属性,利用惯性的实例:运动员助跑起跳,乘车系安全带可以降低司机惯性带来的伤害,惯性不是力,不能用受到惯性、惯性力的作用进行表述。
4、机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比。
5.C
A.水轮驱动装置推动杆压缩皮橐送风时,带动连接杆的绳拉弯竹子,是绳对竹子的拉力改变了竹子的形状,故A正确不符合题意;
B.送风时竹子的弹性形变量增加,弹性势能增大,故B正确不符合题意;
C.送风时,杆压缩皮橐,杆对皮橐有压力,并且皮橐在力的方向上通过一段距离,所以杆对皮囊做功,故C错误符合题意;
D.竹子恢复原状过程中,弹性形变变小,弹力变小,故D正确不符合题意。
故选C。
A.绳拉弯竹子,是绳对竹子的拉力改变了竹子的形状;
B.弹性势能大小与弹性形变大小有关;
C.做功的要素:①作用在物体上的力;②物体在力的方向上通过的距离;
D.弹力大小与弹性形变的程度有关。
6.C
A.顶部的定滑轮不省力,也不省距离,故A错误;
B.由于摩擦力的存在,机械效率不可达到100%,故B错误;
C.该装置主要是利用重力势能转化为动能,故C正确;
D.给车轮轴承加润滑油可以减小摩擦力,故D错误。
故选C。
A.定滑轮不省力,也不省距离,但是可以改变力的方向;
B.任何机械的效率不可能为100%;
C.无碳小车的能量由重力势能转化为动能;
D.给轴承加润滑油可以减小摩擦力。
7.D
由图可知,D点的位置最高,由重力势能大小的影响因素可知,不考虑重力变化,队伍在D点的重力势能最大,故ABC不符合题意,D符合题意。
故选D。
重力势能与物体的质量和高度有关,质量相同时,高度越高,重力势能越大。
8.D
A.摇杆在使用过程中,动力臂大于阻力臂,属于省力杠杆,故A错误;
B.人踩动长柄摇杆末端的踏板使大轮转动,相同时间内转速越快输水做功越多,选项中缺少时间相同这个条件,故B错误;
C.一定质量的水被水车提升到高处,其质量不变、高度增加,则重力势能增大,故C错误;
D.增大机械效率的方法:一是增大提升的物重,二是减小摩擦,因此要提高“龙骨水车”提水效率,可以增大槽内板叶刮水的质量,或在各部件之间加润滑油来减小摩擦,故D正确。
故选D。
A.根据动力作用在轮上,可以省力;
B.转轮转速越快,相同时间内输水做功越多;
C.重力势能与质量和高度有关;
D.增大机械效率的方法:一是增大提升的物重,二是减小摩擦。
9.D
A.由图可知,乙车速度大小为,故A错误;
B.由图可知,甲车速度大小为,甲的速度大于乙的速度,甲、乙两车同时同地在水平路面上向北沿直线行驶,0~6s内,以甲车为参照物,乙车向南运动,故B错误;
C.0~6s内,甲车的重力的方向始终竖直向下,而甲车在竖直方向没有移动,因此不做功,故C错误;
D.若甲车0~8s内的牵引力大小恒为1.6×103N,则0~6s内,甲车牵引力的功率为P甲=F甲v甲=1.6×103N×10m/s=1.6×104W
故D正确。
故答案为:D。
根据题图中的相关数据计算乙车的速度。物体相对参照物的位置变化了,物体是运动的,物体相对参照物的位置不变,物体是静止的。根据功的公式W=Fs进行计算。根据P=Fv进行计算。
10.B
A、洗热水澡时的水温约为40℃,故A不符合实际;
B、中学物理课本宽约为18cm,故B符合实际;
C、教室内饮水机加热时的功率约为500W,故C不符合实际;
D、初中生从一楼走到五楼的时间约为30s,故D不符合实际。
故答案为:B。
首先要对相关物理量有个初步的认识,不同物理量的估算,有的需要凭借生活经验,有的需要经过简单的计算,有的要进行单位换算,最后判断符合要求的是哪一个。
11.A
A.卫星通信利用电磁波来传递信息的,即《东方红》乐曲通过电磁波传到地面上,故A正确;
B.东方红一号沿椭圆形轨道绕地球运行,以地球为参照物,它的位置在不断变化,即东方红一号是运动的,故B错误;
C.一切物体在任何情况下都有惯性,东方红一号在运行过程中仍具有惯性,故C错误;
D.相比于近地点,东方红一号在远地点时,质量不变,高度最高,重力势能最大,故D错误。
故选A。
A.卫星通信利用电磁波来传递信息的;
B.判断物体是运动还是静止的,取决于物体与参照物之间是否有位置变化,若有,则是运动的,若没有,则是静止的;
C.惯性是物体的一种固有属性,一切物体在任何情况下都有惯性;
D.物体的重力势能与物体的质量和高度有关,质量一定,高度越高,重力势能越大。
12.A
A.力可以改变物体的运动状态,火箭加速升空过程中,受到发动机推力等力的作用,速度不断增大,运动状态发生改变,故A正确;
B.火箭加速升空过程中,卫星相对于火箭的位置没有发生变化,是静止的,故B错误;
C.火箭以氢为燃料,是因为氢的热值大,完全燃烧相同质量的氢可以释放出更多的热量,转化为更多的机械能,故C错误;
D.火箭加速升空过程中,卫星的质量不变,速度增大,动能增大;高度增大,重力势能增大,故D错误。
故选A。
A.力不仅可以改变物体的形状,还能改变物体的运动状态。
B.物体相对于参照物的位置变化了,物体就是运动的;物体相对于参照物的位置不变,物体就是静止的。
C.氢的热值大,完全燃烧相同质量的氢可以释放出更多的热量。
D.动能大小的影响因素:质量、速度。质量越大,速度越大,动能越大。重力势能大小的影响因素:质量、被举得高度。质量越大,高度越高,重力势能越大。
13.C
A.由图可知,ON为动力臂,OM为阻力臂,OM:ON=1:2,即动力臂大于阻力臂ON>OM,则该杠杆是省力杠杆,故A错误;
B.根据杠杆平衡条件可得
匀速提升物体时,M端绳子拉力等于物体重力,则
代入数据
解得
故B错误;
C.M端绳子对物体的拉力等于物体的重力,物体上升0.5m,M端绳子拉力对物体做功为
故C正确;
D.拉力在1s内使物体缓慢上升了0.5m,则M端绳子拉力对物体做功的功率为
故D错误。
故答案为:C。
动力臂大于阻力臂,则该杠杆是省力杠杆;根据杠杆的平衡条件得G×OM=F×ON,据此得出F大小;根据W=Gh算出M端绳子拉力对物体做功;根据功率公式算出M端绳子拉力对物体做功的功率
14.A
A.动能的大小与物体的质量和速度有关,探测器减速过程中,质量不变,速度减小,所以动能减小,故A正确;
B.惯性是物体的固有属性,一切物体在任何情况下都有惯性,探测器着陆月球后仍然具有惯性,故B错误;
C.月球在绕地球公转,探测器在月球上,所以月球上的探测器相对地球是运动的,故C错误;
D.质量是物体的一种基本属性,它不随物体的位置、状态、形状等的改变而改变,月壤样品带回地球后质量不变,故D错误。
故选A。
A.动能的大小与物体的质量和速度有关。
B.惯性是物体的固有属性,一切物体在任何情况下都有惯性。
C.物体相对于参照物的位置变化了,物体就是运动的;物体相对于参照物的位置不变,物体就是静止的。
D.质量是物体的一种基本属性,它不随物体的位置、状态、形状等的改变而改变。
15.D
A.由图可知,动滑轮上的绳子段数为n=2,
绳子自由端移动的距离:s=nh=2×6m=12m,
拉力做的功:W=Fs=300N×12m=3600J,
拉力的功率:,故A错误;
B.绳子末端移动的速度:,故B错误;
C.滑轮组的机械效率:,故C错误;
D.工人的重力:G人=m人g=60kg×10N/kg=600N,
工作时矿工对水平地面的压力等于他的重力与绳子拉力之差,即:
F压=G人-F=600N-300N=300N,
地面的受力面积等于工人的脚与地面接触的总面积,
故他对水平地面的压强:,故D正确。
故选D。
A.由图可知,动滑轮上的绳子段数,根据s=nh可得绳子自由端移动的距离,根据W=Fs求拉力做的总功,根据求拉力的功率;
B.根据求绳子末端移动的速度;
C.根据求滑轮组的机械效率;
D.根据G=mg求工人的重力,工作时矿工对水平地面的压力等于他的重力与绳子拉力之差,根据求他对地面的压强。
16.A
A.重力势能大小的影响因素:质量和高度,返回舱在竖直匀速下落过程中,速度不变,高度减小,重力势能减小,故A正确;
B.动能大小的影响因素:质量和速度,返回舱在竖直匀速下落过程中,质量和速度都不变,则动能不变,故B错误;
C.返回舱穿越大气层时,返回舱克服空气的摩擦做功,重力势能转化为内能,故C错误;
D.返回舱匀速下落的过程中,它的质量不变,速度不变,故动能不变;同时质量不变,高度减小,重力势能减小,所以机械能变小,机械能不守恒,故D错误。
故选A。
A.重力势能与质量和高度有关;
B.动能与质量和速度有关;
C.根据能量转化的知识判断;
D.注意机械能与内能的转化。
17.C
A.球拍面上的橡胶是绝缘体,不是导体,故A错误;
B.乒乓球从桌上弹起上升过程中,质量不变,高度增加,重力势能增大,故B错误;
C.新球拍有橡胶味,是因为橡胶分子在不停地做无规则运动,扩散到空气中,使人能闻到橡胶味,故C正确;
D.乒乓球被击出后继续运动是因为乒乓球具有惯性,而不能说受到惯性的作用,惯性是物体的一种属性,不是力,故D错误。
故选C。
A.橡胶是绝缘体,不是导体。
B.影响重力势能大小的因素:质量和高度。质量越大,高度越高,重力势能越大。
C.不同物质互相接触时彼此进入对方的现象叫扩散,扩散现象说明分子在不停地做无规则运动。
D.一切物体具有惯性,而不能说受到惯性的作用,惯性是物体的一种属性,不是力。
18.B
A.将书从地面提起的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故A不符合题意;
B.乙图中在水平路面推车的过程,人的力作用在车上,书没有受到人的作用力,人对书没有做功,故B符合题意;
C.将书搬上教学楼的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故C不符合题意;
D.将书堆放在桌面的过程,人对书施加了力,且书在力的方向上移动了距离,所以人对书做了功,故D不符合题意。
故选B。
做功的两个必要因素:作用在物体上的力,物体在力的方向上通过的距离;二者缺一不可。
19.D
A.电磁弹射系统与电动机的工作原理相同,即通电导体在磁场中受到力的作用,故A正确不合题意;
B.人形机器人对舞台的压力与地面对它的支持力是一对相互作用的力,大小相等,故B正确不合题意;
C.飞机的机翼做成上凸下平的形状,机翼上方的空气流速大、压强小,机翼下方的空气流速小、压强大,所以机翼受到一个向上的压强差,从而产生向上的升力,故C正确不合题意;
D.天宫二号由近地点向远地点运动时,质量不变,高度增加,速度减小,重力势能增加,动能减小,故D错误符合题意。
故选D。
A.电动机是根据通电线圈在磁场中受到力的作用而发生转动的原理制成的;
B.相互作用的两个力大小相等;
C.流体流速越大的位置,压强越小;
D.动能与物体的质量和速度有关,重力势能与物体的质量和高度有关。
20.B
载人飞船离开地面加速上升的过程中,质量不变,速度增大,动能增大,高度增大,重力势能增大。
故答案为:B。
动能大小的影响因素:质量和速度,质量越大,速度越大,动能越大;重力势能大小的影响因素:质量和高度,质量越大,高度越高,重力势能越大。
21.D
A.发射前,以发射塔为参照物,运载火箭相对发射塔的位置没有发生改变,是静止的,故A错误;
B.发射时,发射塔周围出现大量“白气”是液化现象,故B错误;
C.加速升空过程中,卫星质量不变,速度增大、高度增大,动能和重力势能都增大,此过程是燃料燃烧的内能转化为机械能,动能和重力势能没有发生相互转化,故C错误;
D. 加速升空过程中,卫星动能增大、重力势能增大,机械能等于动能与势能之和,所以机械能增大,故D正确。
故选D。
(1)在研究物体运动时,要选择参照的标准,即参照物,物体的位置相对于参照物发生变化,则运动,不发生变化,则静止;
(2)物质从气态变为液态的过程叫液化,液化要放热;
(3)机械能包括动能和势能;动能的大小与质量和速度有关,重力势能大小与质量和高度有关。
22.变小;运动
(1)当游客滑下时,质量不变,高度变小,重力势能变小;
(2)当游客下滑时,地面与游客之间有位置的变化,以游客为参照物,地面是运动的。
(1)重力势能的影响因素是物体的质量和高度,质量越大,高度越高,重力势能越大。
(2)看被研究的物体与参照物之间的相对位置是否发生了改变,如果发生改变,则物体是运动的;如果未发生变化,则物体是静止的。
23.(1)形状
(2)无规则运动
(3)引力
(4)变大
(1)“扎”风筝的过程,人对竹篾施加了力的作用,竹篾在力的作用下,形状发生了变化,所以说明力可以改变物体的形状;
(2)“绘”风筝的过程,闻到颜料淡淡的气味,属于扩散现象,是因为分子在不停地做无规则运动的结果;
(3)“糊”风筝的过程,胶水能将纸和框架粘住主要是因为分子间存在引力;
(4)“放”风筝的过程,风筝上升时,质量不变,高度变大,所以其重力势能变大。
(1)力可以改变物体的形状,力可以改变物体的运动状态。
(2)一切物质的分子都在不停地做无规则运动,这种无规则运动叫作分子的热运动。
(3)分子间同时存在相互作用的引力和斥力。
(4)重力势能大小与质量和高度有关。
24.摩擦;减小
(1)最新研发的人形机器人,关节处有液态润滑剂形成的润滑膜,减小了接触面的粗糙程度,在压力一定时,可减小摩擦力,使其动作更灵活;
(2)山区果农用无人机将一筐橙子从山上运往山下的过程中,这筐橙子的质量不变,高度变小,所以其重力势能减小。
(1)减小摩擦的方法:在接触面粗糙程度一定时,减小压力;在压力一定时,减小接触面的粗糙程度;使接触面脱离;用滚动代替滑动。
(2)重力势能大小的影响因素:质量、被举的高度;质量越大,高度越高,重力势能越大。
25.(1)电磁;15
(2)7200
(1)工作人员熟练操作手柄,通过电磁波无线遥控无人机,实现定点起飞。
已知无人机沿水平方向匀速直线飞行的路程s = 300m,用时t = 20s,则无人机水平飞行时的速度大小为:。
(2)消耗的电能0.25kW h = 0.25×3.6×106J = 9×105J。
已知电能转化为机械能的效率为80%,则转化的机械能W = 9×105J×80% = 7.2×105J。
无人机内电动机的机械功率为:。
(1)根据电磁波的特点和应用解答。根据计算无人机水平飞行时的速度。
(2)知道千瓦时与焦耳单位换算,电能转化为机械能的效率为80%,则转化的机械能W = 9×105J×80%,根据计算无人机内电动机的机械功率。
26.3.6;1
拉力做的功,即总功:W总=Fs=6N×0.6m=3.6J;
克服物重做的有用功:W有=Gh=10N×0.3m=3J,
忽略弹簧测力计的重力和空气阻力,克服斜面对物体的摩擦力做的功为额外功,
则额外功:W额=W总-W有=3.6J-3J=0.6J,
斜面对物体的摩擦力:。
已知拉力和斜面长,根据W=Fs求拉力做的功,即总功;根据W=Gh求有用功;忽略弹簧测力计的重力和空气阻力,克服斜面对物体的摩擦力做的功为额外功,根据W总=W有+W额可得额外功,根据W额=fs求斜面对物体的摩擦力。
27.1.2;1.5;3
(1)使用斜面做的有用功:W有=Gh=24N×0.5m=12J;
(2)滑轮组动滑轮上有3股绳,所以对重物的拉力为F=nF拉=3×5N=15N,
拉力所做的总功为:W总=Fs=15N×1m=15J;
拉力所做总功的功率为:;
(3)因W总=W有用+W额外,则额外功:W额=W总-W有用=15J-12J=3J,
由W额=fs可得物体受到的摩擦力:。
(1)利用W有=Gh求出有用功。
(2)根据W=Fs算出拉力所做的总功,根据算出拉力所做总功的功率;
(3)根据W=Gh求出有用功;根据总功与有用功的差求出额外功,再根据W额=fs变形后可求摩擦力f。
28.重力势;动;摩擦力
水从高处流下,冲击水轮机带动石磨转动,水的高度减小,重力势能变小,石磨转动,动能变大,将水的重力势能能转化为石磨的动能;石磨接触面粗糙,在压力一定时,可增大摩擦力。故第1空填:重力势;第2空填:动;第3空填:摩擦力。
质量一定时,高度减小,重力势能减小,石磨被推动,动能变大;压力一定时,接触面越粗糙,摩擦力越大。
29.1.61×105;机械;3.5×10-3
(1)汽油机工作时,首先把燃料中的化学能转化为内能,然后部分内能转化为机械能;
(2)由图知,损失的能量为:Q损失=1.2×105J,
获得的有用的机械能是W=4.1×104J,
则燃料完全燃烧释放的能量Q放=Q损失+W=1.2×105J+4.1×104J=1.61×105J,
(3)根据Q放=mq可得该工作过程中消耗的汽油质量为:
。
(1)做功冲程内燃机给汽车提供动力,此冲程中内能转化为机械能;
(2)燃料完全放出的能量一部分转化为有用的机械能,其它损失了;
(3)根据Q放=mq求出该工作过程中消耗的汽油质量。
30.0.75;3
根据,拉力F的功率为
图中滑轮为定滑轮,不计绳重及绳与滑轮间摩擦,因为弹簧测力计的示数为2N,因此A受到的水平向左的拉力为2N,B受到A水平向左的摩擦力也为2N;长木板B受到向右的拉力等于水平面的摩擦力加上A对B的摩擦力,B受到水平面的摩擦力为f=5N﹣2N=3N。
根据计算拉力F的功率;物体A与长木板B之间的摩擦力等于弹簧测力计的示数;长木板B受到向右的拉力等于水平面的摩擦力加上A对B的摩擦力,据此求B受到水平面的摩擦力。
31.上升;增大
大气压随高度的增加而减小,携带如图所示的“水气压计”向山顶攀登过程中,因为外界气压减小,所以,“水气压计”管内液面在瓶内较大气压的作用下会上升;向山顶攀登过程中,小明的质量不变,高度上升,所以重力势能会增大。
大气压随高度的增加而减小;重力势能大小的影响因素:质量、被举的高度;质量越大,高度越高,重力势能越大。
32.增大;
弹簧的弹性势能与弹幕的形变程度有关,形变程度越大,弹性势能越大。当P从A端滑至B端过程中,弹簧被压缩,形变程度增大,其弹性势能增大;
由图可知,滑动变阻器R与R0串联,电流表测电路中的电流。
当电路中的电流最大为I大=0.6A时,R接入电路的电阻最小为0Ω,
此时R0的阻值:;
当电路中的电流最小为I小=0.1A时,R接入电路的电阻最大,
此时电路的总电阻:,
根据串联电路的电阻规律可得,R接入电路的最大阻值:R=R总-R0=30Ω-5Ω=25Ω。
则R连入电路的阻值变化范围是0-25Ω。
弹簧的弹性势能与弹幕的形变程度有关,形变程度越大,弹性势能越大;
由图可知,滑动变阻器R与R0串联,电流表测电路中的电流。已知电流表示数的变化范围,根据欧姆定律可得R的最小值和最大值,即R的阻值变化范围。
33.20;75
(1)由图可知,滑轮组绳子的有效股数n=2,则绳子自由端移动的距离:s=nh=2×10m=20m;
(2)拉力F做功:W总=Fs=400N×20m=8000J;
物体的重力:G=mg=60kg×10N/kg=600N,
拉力做的有用功:W有=Gh=600N×10m=6000J,
滑轮组的机械效率:。
(1)根据图片确定滑轮组绳子的有效股数n,绳子自由端移动的距离s=nh;
(2)利用W=Fs求拉力F做的功,再利用W=Gh求拉力做的有用功,滑轮组的机械效率等于有用功与总功之比。
34.300;12
由图可知,动滑轮上的绳子段数为n=3,拉力所做的功:
W=Fs绳=Fns物=10N×3×10m=300J;
水平使用滑轮组时,克服物体所受摩擦力做的功为有用功,
根据题意可得物体受到的摩擦力:f=0.12G=0.12×100N=12N,
有用功:W有=fs物=12N×10m=120J,
滑轮组有用功的功率:。
由图可知,动滑轮上的绳子段数,根据W=Fs绳=Fns物求拉力所做的功;
水平使用滑轮组时,克服物体所受摩擦力做的功为有用功,根据题意可得物体受到的摩擦力,根据W=fs物求有用功,根据求滑轮组有用功的功率。
35.S1断开,S2接2;15
据图可知,低温档位,两个电阻串联,此时电阻最大,根据电功率公式P=可知,此时电功率最小处于低温档位,即此时S1断开,S2接2。
高温挡,电路中两电阻并联,并联的总电阻R=;中温档电路中只有R1,结合P=可知,,根据电阻的并联可知,代入数据解得R2=4.8Ω。低温档位的电阻为R‘=R2+R1=9.6Ω;根据电功率公式P=可知,总功率P=
1、并联电路电压相等、支路电流之和为干路电流,电阻为;
2、串联电路的电路规律:串联电路,电流处处相等,电源的电压为用电器电压之和,总电阻为用电器电阻之和;
3、电功率的计算:公式P=UI。
36.750;30
拉力做功W=Fs=150N×5m=750J,物体克服重力做功W=Gh=500N×1.2m=600J,功率P=
做功公式W=Fs,功分为有用功和额外功,有用功为克服重力做功,额外功主要为摩擦力作用;
功率的计算:公式为W=Pt。
37.做功;不是
举重运动员将杠铃举起的过程中,举重运动员对杠铃有力的作用,杠铃在力的方向上移动了距离,所以举重运动员对杠铃做了功;
举重运动员举起杠铃静止时,地面对运动员的支持力等于运动员与杠铃的总重力,要大于举重运动员的重力,两个力大小不相等,故地面对运动员的支持力与运动员的重力不是一对平衡力。
故答案为:做功;不是。
(1)力对物体做功的两个条件:作用在物体上的力;物体沿力的方向通过的距离。两个条件缺一不可;
(2)二力平衡的条件:大小相等、方向相反、作用在同一直线上、作用在同一物体上。
38.(1)运动
(2)1.2
(3)1.4
(1) 无人机上升时,无人机和地面的运动状态不同,所以二者相对运动;
(2) 无人机载着空货箱竖直匀速上升36m用时30s,速度为;
(3)据题分析可知,放入货物后,其速度为,,解得G物=14N,根据重力公式计算质量为m=。
1、物体相对运动:物体与参照物运动状态不一致,所以物体相对参照物运动,物体与参照物运动状态不一致,所以物体相对参照物静止;
2、速度的计算:v=s/t,相同时间下物体的路程大,则速度大,相同路程下,物体的时间小速度大,当速度一定时,时间越长通过的路程越长,
3、功率的计算:公式为P=Fv。
39.(1)静止;增大
(2)8;惯性
(1)滑板和人的运动状态相同,所以二者相对静止,加速下滑,速度增加,动能增加;
(2)游客的下滑速度, 滑到底端时 ,游客具有惯性,不能立刻停下。
1、惯性是物体的基本属性,只有物体重力有关,当物体速度发生变化时,由于惯性物体保持原来运动状态的属性,利用惯性的实例:运动员助跑起跳,乘车系安全带可以降低司机惯性带来的伤害,惯性不是力,不能用受到惯性、惯性力的作用进行表述;
2、根据速度的公式计算分析,速度公式为v=s/t,根据题目中所给的信息,如已知速度时间求解路程,或者已知路程和时间求解速度,匀速运动的特点,在st曲线上为一条倾斜向上的直线,在vt曲线为一条水平直线。
3、物体相对运动:物体与参照物运动状态不一致,所以物体相对参照物运动,物体与参照物运动状态不一致,所以物体相对参照物静止。
40.(1)
(2)左
(3)0.75
(4)电压
(1)图甲中电流表还没有接入电路,且电流表要串联在电路中,如下图所示:
(2)正确连接好电路,闭合开关前,应将滑动变阻器的滑片P移到阻值最大处,即最左端。
(3)闭合开关后,移动滑片P,观察到电压表的示数为2.5V时,电流表的示数如图乙所示,电流表选用小量程,分度值为0.02A,则此时电流为0.3A,
小灯泡的额定功率为:P额=U额I额=2.5V×0.3A=0.75W;
(4)进行相同实验的另一同学,检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,电压表通过变阻器与电源连通,此时电压表测电源电压,所以会观察到电压表的指针有明显偏转;电压表串联在电路中,且电压表自身的电阻很大,所以电路中的电流几乎为零,即电流表的指针几乎不偏转。
(1)电流表要串联在电路中;
(2)闭合开关前,为保护电路,应将滑动变阻器的滑片P移到阻值最大处;
(3)图乙中电流表选用小量程,根据电流表的分度值和指针位置读出其示数,根据P=UI求出小灯泡的额定功率;
(4)检查电路发现导线连接正确且开关闭合,但灯座上忘记安装小灯泡,电压表通过变阻器与电源连通,此时电压表测电源电压,且电压表自身的电阻很大,据此分析。
41.(1)秒表;甲、丁;c;甲
(2)乙;=
(3)丙
(1)停表可以测量时间;
研究该时间与屋顶材料的关系, 变量为屋顶材料,其余因素相同,所以选择甲丁实验;据图像分析可知,C图像在d上面,即相同时间下,c经过的路程大,所以c图像的平均速度大于d;据图可知,甲的路线比乙短,所以经过甲的速度大;
(2)据表格分析可知,乙实验下,钢柱落地的距离大,所以 对墙体保护更好 ;不计阻力,初始状态下机械能相同,没有额外功,所以机械能守恒,末状态重力势能相同,动能也相同;
(3)据图可知,甲乙被屋顶挡住的光线多,丙挡住的光线小,所以 ,阳光能够照射到房间内距离最远的是 丙。
机械能:机械能为动能和重力势能之和,当质量不变时,动能和速度成正比,速度不变时,动能和质量成正比;当质量不变时,重力势能和高度成正比,高度不变时,重力势能和质量成正比;
根据速度的公式计算分析,速度公式为v=s/t,根据题目中所给的信息,如已知速度时间求解路程,或者已知路程和时间求解速度;
控制变量法:在物理实验中,存在多个影响因素共同决定某个物理量,在研究单一变量对试验结果的影响时,要保持非研究因素的相同。
42.(1)毛巾
(2)初速度
(3)远;匀速直线
(4)不同;减小小球在斜面上的高度
(1)实验前,小明同学用大小相同的力将手分别压在毛巾和木板表面上,并向前滑动,由于压力相同,毛巾更粗糙,所以在此过程中小明感到毛巾对手的运动的阻碍作用较大些。
(2)实验时将同一辆小车从同一个斜面上的同一高度处,由静止开始滑下,他这样操作的目的是为了使小车运动到水平面时具有相同的初速度。
(3)当小车受到的阻力越小,则小车运动的距离就越远。由此可进一步推理得出:若运动的小车不受阻力,它的速度就不会减小,将会一直做匀速直线运动。
(4)小明还想探究物体的动能大小与物体速度的关系,需要控制质量相同,改变速度大小,将一个小钢球分别放在同一斜面上的不同高度处,由静止滑下,撞击放在水平桌面上的木块,比较木块移动的距离。当他将小钢球放在斜面上较高处实验时,发现小球撞击木块后,木块直接冲出水平桌面,由此可知小球的动能过大,为避免这种现象发生,应减小小球的动能大小,在质量不变时,减小小球的速度,故较合理的改进建议:减小小球在斜面上的高度。
故答案为:(1)毛巾;(2)初速度;(3)远;匀速直线;(4)不同;减小小球在斜面上的高度。
(1)在压力相同时,接触面越粗糙滑动摩擦力越大;
(2)根据控制变量法可知,让小车从斜面的同一位置静止释放的目的是控制小车下滑到水平面的速度相同;
(3)根据图1的实验现象分析回答;
(4)动能大小与质量和速度有关,研究与其中一个因素的关系时,要控制另外一个因素不变;发现小球撞击木块后,木块直接冲出水平桌面,可知小球的动能过大,为避免这种现象发生,根据影响动能大小的因素分析。
43.(1)解: 无人机转载货物后的总重力为G=G无人机+G货=300N+200N=500N
无人机转载货物后对水平地面的压强。、
(2)解: 无人机匀速上升过程对货物做的功W=G货h=200N×100m=2×104J
(1)静止在水平地面上时对地面的压力等于总重力,根据算出它对地面的压强;
(2)根据匀速上升时升力等于重力,根据W=Gh计算做功。
44.(1)解: 飞机在0.5h内通过的路程
(2)解: ;
飞机在0.5h内水平方向牵引力做的功
;
(3)解: 当速度达到时,飞机即将离地起飞,,可得;
当飞机以速度滑行时;
飞机在水平跑道上滑行,竖直方向上受力平衡,
所以。
(1)已知飞机的飞行速度和时间,根据s=vt得出飞机在上述0.5h内通过的路程。
(2)根据W=Fs得出飞机在上述0.5h内水平方向牵引力做的功。
(3)当速度达到v1时,飞机即将离地起飞,此时飞机所受升力与重力相等,结合F=kv2得出飞机在跑道上滑行速度为0.5v1时飞机获得的升力,由力的平衡得出飞机在跑道上滑行速度为0.5v1时受到的支持力大小。
45.(1)解:货箱的速度:。
(2)解:货箱匀速竖直提升时处于平衡状态,
则支持力;
叉车对货箱所做的功:。
(3)解: 叉车对货箱所做功的功率:。
(1)已知货箱上升的高度和时间,根据求货箱的速度;
(2)叉车克服货箱的重力做功,根据W=Gh=mgh求叉车对货箱所做的功;
(3)根据求叉车对货箱所做功的功率。
46.(1)解: 容器底部受到的压强
(2)解: A处于漂浮状态,A受到的浮力
由得A排开水的体积
A漂浮时浸入水中的深度
(3)解: A、B悬浮时,受到总浮力
B受到的重力
B开始运动时,A上表面与B下表面重合,距容器底距离
A、B刚好浸没时,液面上升的高度
B刚好浸没时,下表面距容器底的距离
B开始运动到刚好浸没时运动的距离
B的重力做功
(1)根据p=ρ液gh求容器底部受到水的压强;
(2)根据物体的漂浮条件求出A漂浮时受到的浮力,根据F浮=ρ液gV排求出此时A排开水的体积,根据V=Sh求出此时A浸入水中的深度;
(3)当AB悬浮时,将二者的体积相加得到排开水的总体积,然后根据阿基米德原理计算此时它们受到的浮力,接下来减去A的重力计算出B的重力。
B开始运动时,A上表面与B下表面重合, 计算出距离容器底部的距离和液面上升的高度。再计算出B刚好浸没时下表面到容器底部的距离,进而计算出B从开始运动到刚好浸没通过的距离,最后根据W=Gh计算B的重力做功即可。
47.(1)解:由图可知开关S1、S2同时接1,电动机中电流方向为从右到左;开关S1、S2同时接2,电动机中电流方向为从左到右;所以通过控制开关S1、S2,改变通过电动机中电流的方向可实现前进、后退。
(2)解: 电动机正常工作5min消耗的电能
电动机正常工作电流为
产生的热量为
(3)解: 灯泡正常工作的电流为
则电路中最大电流为0.3A,由题意可知电动机正常工作,则电源电压为24V,根据欧姆定律和串联电路特点可知此时R连入电路的最小阻值为
(1)由图可知开关S1、S2同时接2,电动机中电流方向为从左到右,开关S1、S2同时接1,电动机中电流方向为从右到左;控制开关S1、S2,改变通过电动机中电流的方向实现前进、后退。
(2)根据W=Pt计算 电动机正常工作5min消耗的电能,结合电功率公式P=UI计算电动机正常工作电流;结合焦耳定律计算产生的热量;
(3) 灯泡L(18V 5.4W) ,结合P=UI计算灯泡正常工作的电流;电动机正常工作,根据并联电路电压规律分析可知,电源电压为24V,根据U=IR以及串联电路电压规律计算R连入电路的最小阻值。
48.(1)A;D
(2)由于题意可知,当感应区上受到的压力F=300N时,衔铁被电磁铁吸引转换触点,此时电流即为感应装置中电磁铁的临界值。由乙图可知,当压力F=300N时,电阻R=70Ω,且与R1串联,根据欧姆定律可知电流的临界值为
重力更小的人,压力更小,由图乙可知,R更大,保持电磁铁电流临界值不变,根据可知,可减小滑动变阻器R1接入的阻值。
(3)处于柔光状态工作时,加装的灯泡L与灯泡L0串联,又两灯泡规格相同,根据串联电路电压规律可知,每个灯泡两端的实际电压为110V,由于灯丝电阻不变,所以有
灯泡的实际功率为
L与L0串联的总功率P总=2P实=2×25W=50W
每天节省的电能为W=(ΔP额-P总)t=(100W-50W)×8×3.6×103s=1.44×105J
30天节约的电能为W总=30×1.44×105J=4.32×106J
(4)推力F既克服重力做有用功,又要克服摩擦力做额外功,所以推力做的功等于有用功和额外功之和,所做的有用功为W有用=Gh=200N×20m×sin(90°-60°)=2000J
摩擦力大小为f=0.05G=0.05×200N=10N
克服摩擦力所做的额外功为W额外=fs=10N×20N=200J
所以推力F做功为W=W有用+W额外=2000J+200J=2200J
(1)当人走进压力感应区时,压力增大,由乙图可知,电阻R的阻值变小,控制电路的总电阻变小,根据可知,电压一定是,电流变大,电磁铁磁性增强,动触点被吸到右边静触点与B接触,此时只有L0接入电路,灯光亮,故灯泡L接在电路中A处。
根据安全用电的要求,开关应接在火线的用电器之间,所以工作电路的导线D端应接火线。
(1)当人走进压力感应区时,压力增大,控制电路的总电阻变小,根据欧姆定律知电流变大,电磁铁磁性增强,根据衔铁的位置变化以及对应的工作状态分析灯泡L的位置即可。开关应接在火线的用电器之间;
(2)根据压力大小确定R大小,根欧姆定律和串联电路的特点计算电流;根据吸引的电流不变,结合压力减小时R的变化分析;
(3)由可得串联的总功率,根据两个灯泡串联的电功率和一个正常工作的电功率结合时间计算电能;
(4)根据推力需要克服摩擦力做功,同时提升物体做功,计算总的功。
21世纪教育网(www.21cnjy.com)
同课章节目录