专题18电与磁(一)(含答案+解析)-【中考真题汇编】2025年中考物理真题分类汇编(全国通用)
文档属性
| 名称 | 专题18电与磁(一)(含答案+解析)-【中考真题汇编】2025年中考物理真题分类汇编(全国通用) |
|
|
| 格式 | docx | ||
| 文件大小 | 3.3MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-07-12 00:00:00 | ||
图片预览
文档简介
专题18电与磁(一)
一、选择题
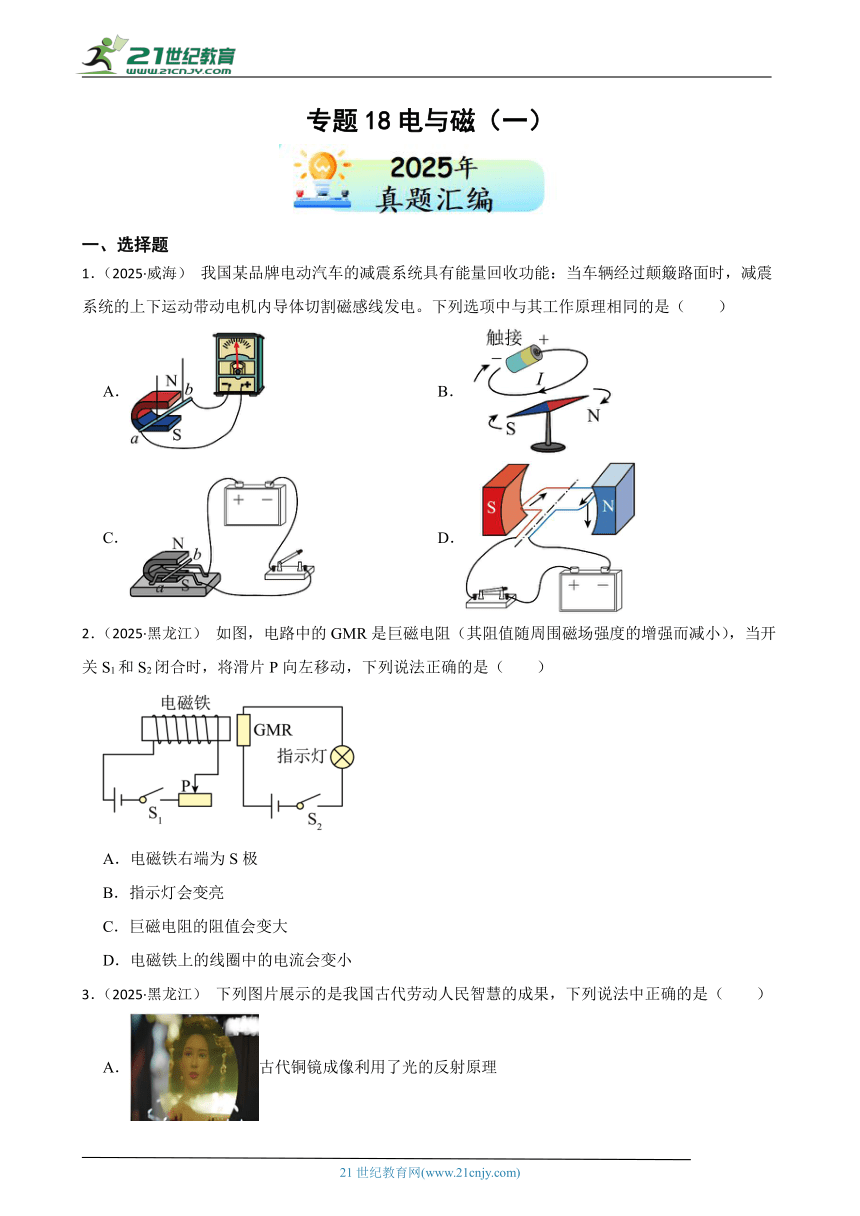
1.(2025·威海) 我国某品牌电动汽车的减震系统具有能量回收功能:当车辆经过颠簸路面时,减震系统的上下运动带动电机内导体切割磁感线发电。下列选项中与其工作原理相同的是( )
A. B.
C. D.
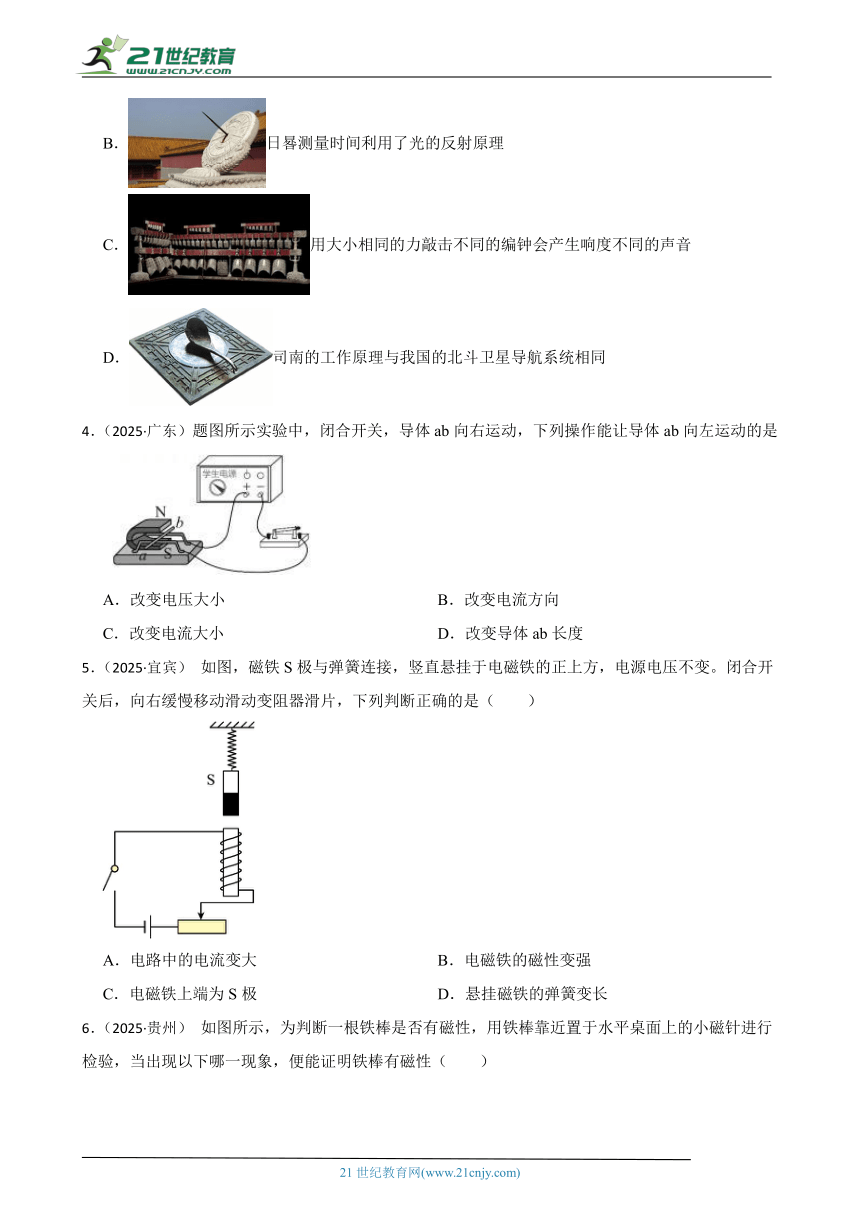
2.(2025·黑龙江) 如图,电路中的GMR是巨磁电阻(其阻值随周围磁场强度的增强而减小),当开关S1和S2闭合时,将滑片P向左移动,下列说法正确的是( )
A.电磁铁右端为S极
B.指示灯会变亮
C.巨磁电阻的阻值会变大
D.电磁铁上的线圈中的电流会变小
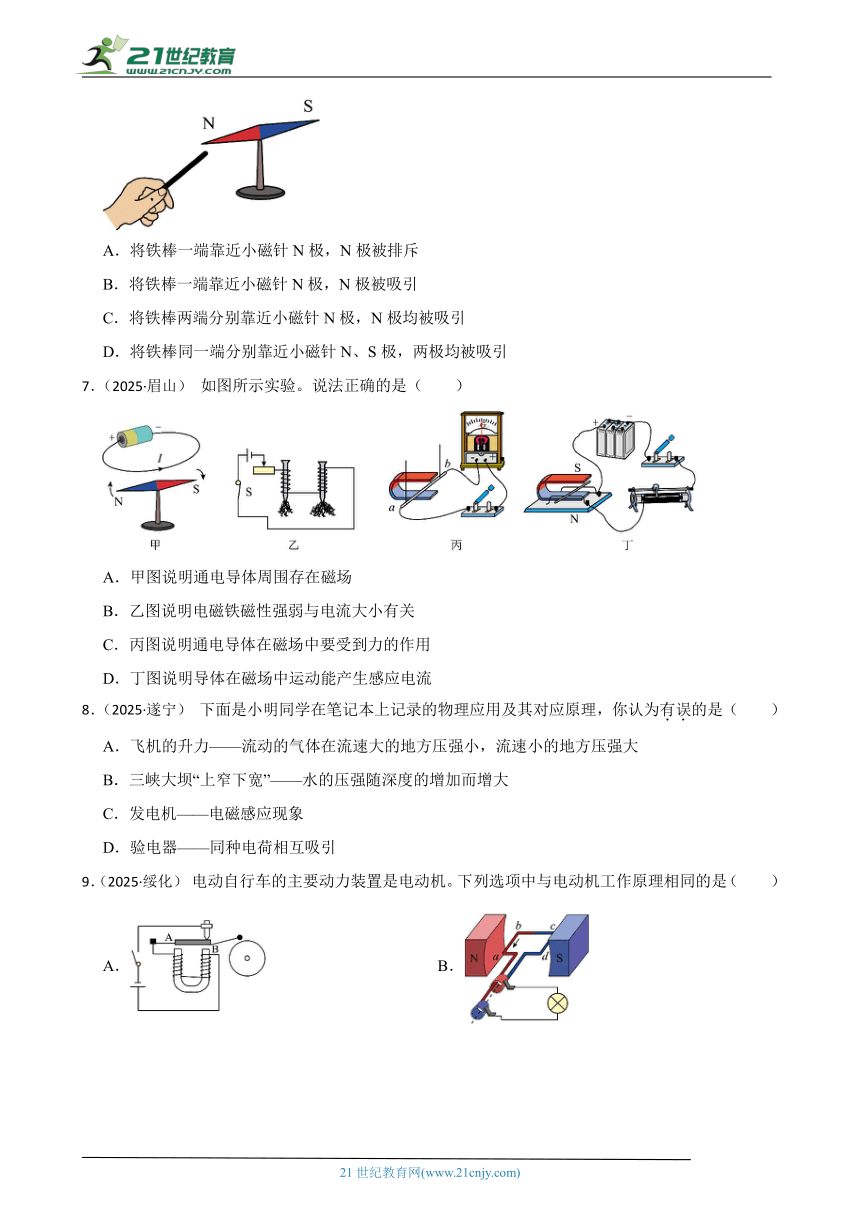
3.(2025·黑龙江) 下列图片展示的是我国古代劳动人民智慧的成果,下列说法中正确的是( )
A.古代铜镜成像利用了光的反射原理
B.日晷测量时间利用了光的反射原理
C.用大小相同的力敲击不同的编钟会产生响度不同的声音
D.司南的工作原理与我国的北斗卫星导航系统相同
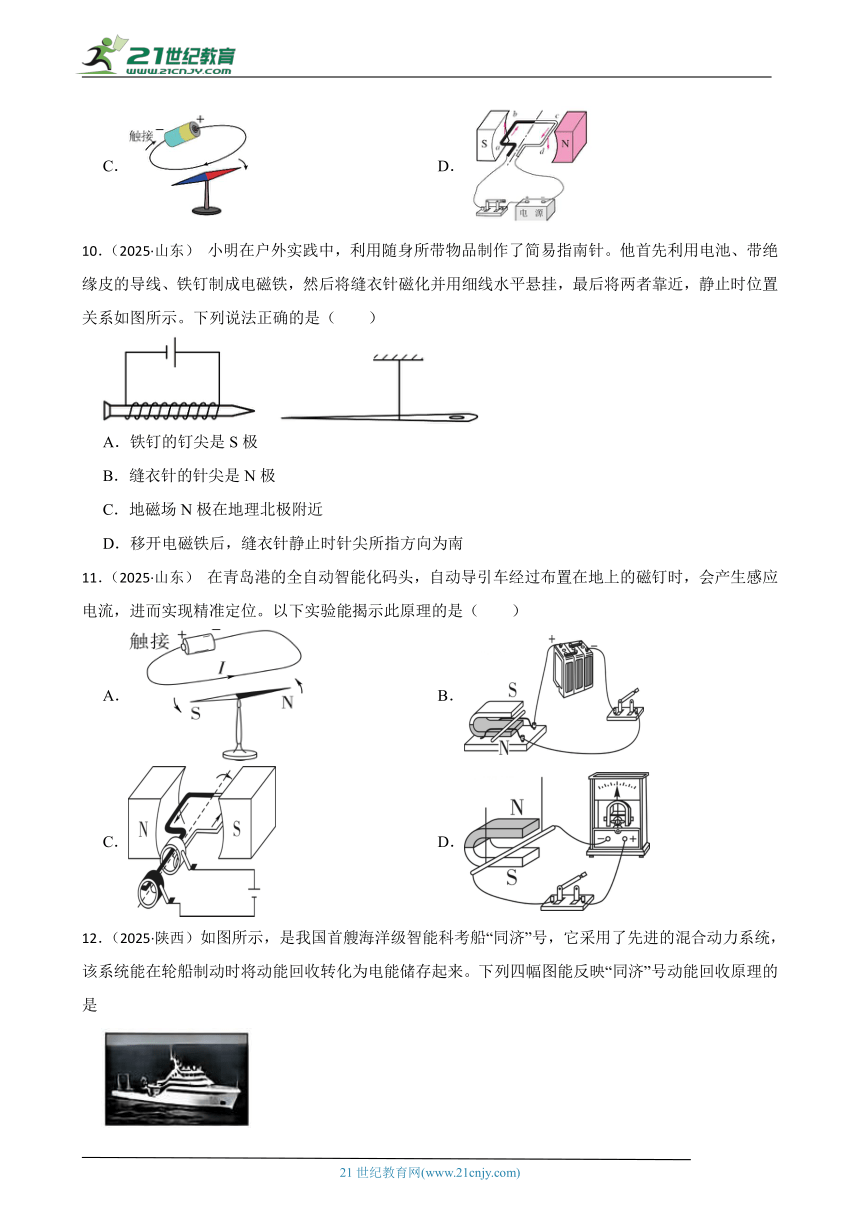
4.(2025·广东)题图所示实验中,闭合开关,导体ab向右运动,下列操作能让导体ab向左运动的是
A.改变电压大小 B.改变电流方向
C.改变电流大小 D.改变导体ab长度
5.(2025·宜宾) 如图,磁铁S极与弹簧连接,竖直悬挂于电磁铁的正上方,电源电压不变。闭合开关后,向右缓慢移动滑动变阻器滑片,下列判断正确的是( )
A.电路中的电流变大 B.电磁铁的磁性变强
C.电磁铁上端为S极 D.悬挂磁铁的弹簧变长
6.(2025·贵州) 如图所示,为判断一根铁棒是否有磁性,用铁棒靠近置于水平桌面上的小磁针进行检验,当出现以下哪一现象,便能证明铁棒有磁性( )
A.将铁棒一端靠近小磁针N极,N极被排斥
B.将铁棒一端靠近小磁针N极,N极被吸引
C.将铁棒两端分别靠近小磁针N极,N极均被吸引
D.将铁棒同一端分别靠近小磁针N、S极,两极均被吸引
7.(2025·眉山) 如图所示实验。说法正确的是( )
A.甲图说明通电导体周围存在磁场
B.乙图说明电磁铁磁性强弱与电流大小有关
C.丙图说明通电导体在磁场中要受到力的作用
D.丁图说明导体在磁场中运动能产生感应电流
8.(2025·遂宁) 下面是小明同学在笔记本上记录的物理应用及其对应原理,你认为有误的是( )
A.飞机的升力——流动的气体在流速大的地方压强小,流速小的地方压强大
B.三峡大坝“上窄下宽”——水的压强随深度的增加而增大
C.发电机——电磁感应现象
D.验电器——同种电荷相互吸引
9.(2025·绥化) 电动自行车的主要动力装置是电动机。下列选项中与电动机工作原理相同的是( )
A. B.
C. D.
10.(2025·山东) 小明在户外实践中,利用随身所带物品制作了简易指南针。他首先利用电池、带绝缘皮的导线、铁钉制成电磁铁,然后将缝衣针磁化并用细线水平悬挂,最后将两者靠近,静止时位置关系如图所示。下列说法正确的是( )
A.铁钉的钉尖是S极
B.缝衣针的针尖是N极
C.地磁场N极在地理北极附近
D.移开电磁铁后,缝衣针静止时针尖所指方向为南
11.(2025·山东) 在青岛港的全自动智能化码头,自动导引车经过布置在地上的磁钉时,会产生感应电流,进而实现精准定位。以下实验能揭示此原理的是( )
A. B.
C. D.
12.(2025·陕西)如图所示,是我国首艘海洋级智能科考船“同济”号,它采用了先进的混合动力系统,该系统能在轮船制动时将动能回收转化为电能储存起来。下列四幅图能反映“同济”号动能回收原理的是
A. B.
C. D.
13.(2025·陕西)用电烤箱烤面包时,烤箱上的电热管会发红发烫,下列用电器的工作原理与电烤箱烤面包时的工作原理相同的是
A.电蒸锅 B.洗衣机 C.电风扇 D.电冰箱
14.(2025·湖北)如图为一种防灾应急手摇电筒。中部固定有线圈,沿着筒身方向摇动电筒,使其内部的小物块来回穿过线圈,灯泡发光。小物块可能是
A.木块 B.石块 C.铜块 D.磁铁块
15.(2025·河南)地球是一个大磁体,我们就处在地球产生的磁场中。下列物体利用地磁场工作的是
A.指南针 B.温度计 C.连通器 D.电磁继电器
16.(2025·山西)小亮把旧电风扇中的电动机拆下来,将它与小灯泡连接成如图所示的闭合电路,在电机转轴一端插入细铁棒,快速转动铁棒,灯泡开始发光。下列说法正确的是
A.灯泡发光,说明该装置中一定有干电池
B.转动铁棒,电机线圈做切割磁感线运动
C.转动铁棒,电机就将电能转化为机械能
D.若铁棒反向转动,电路中不能产生电流
17.(2025·新疆) 下列设备或用电器中,利用了电动机工作的是( )
A.发电机 B.洗衣机 C.电视机 D.汽油机
18.(2025·河北)如图所示,下列操作或物理知识与结果对应正确的是
A.甲:电磁感应→扬声器发声
B.乙:闭合开关→电铃发声
C.丙:同名磁极相斥→小车相互靠近
D.丁:导线触接电池负极→小磁针静止不动
19.(2025·湖南) 动圈式话筒可将声信号转换成电信号。下列四幅实验装置图能反映其工作原理的是( )
A. B.
C. D.
20.(2025·乐山) 发电机组是水电站的核心部分,以下四个装置中符合发电机工作原理的是( )
A. B.
C. D.
21.(2025·泸州)如图所示为学校地理教研组新到的一个磁悬浮地球仪。底座隔空托起地球仪与下列哪个实验原理相同
A.
B.
C.
D.
二、填空题
22.(2025·深圳)全磁悬浮“人工心脏”已研发成功,其核心部件是个带有叶轮的泵,通电后叶轮可高速旋转,带动血液流动。图乙是叶轮悬浮原理简化图,元元同学思考后发现:螺线管通电后,周围存在 ,叶轮受斥力悬浮,叶轮下端的磁极是 极。
23.(2025·宜宾) 明朝郑和下西洋时,航行中使用罗盘和星象来辨别方向,其中罗盘小磁针的北极指向地磁场的 极,地磁场的北极在地理的 极附近。
24.(2025·广西) 如图所示,悬挂在蹄形磁体两极间的导体与灵敏电流计构成闭合回路。当导体静止不动时,电流计指针 ;当导体向右运动时,电流计指针 (选填“偏转”或“不偏转”)。
25.(2025·天津市)工业生产中常用“吸”的方式来搬运物体。吸盘安装在吊车上,抽出空气后的吸盘“吸”起大块玻璃板,这是利用 的作用;电磁铁安装在吊车上,通电后“吸”起大量钢铁,这是利用电流的 效应。
26.(2025·陕西)如图-1,是室内自动换气系统的电路图。控制电路的电源电压为3V,R0为电阻箱,RK的阻值与烟雾浓度K的关系如图-2所示。当电磁铁线圈中的电流I≥0.03A时,衔铁被吸下,电风扇转动,开始排气。
(1)电磁铁工作时,利用了通电导体周围存在 ,其上端为 极。
(2)当烟雾浓度升高时,控制电路中线圈的电流 (选填“变大”“变小”或“不变”)。
(3)控制电路的电源电压低于3V时,若保持空气质量的标准不变,R0的阻值应 (选填“增大”“减小”或“不变”)。
27.(2025·湖北)欧姆当年研究电流跟电阻和电压关系时,电流大小还不能准确测量。他巧妙设计了如图所示的装置来测量电流,用一根细丝悬挂磁针,平行放置在导线上方,当电路中有电流时,导线周围产生 ,因为力能改变物体的 ,所以磁针发生偏转,偏转角度就能反映电流大小。
28.(2025·福建) 将回形针掰直,磁化后放在树叶上,漂浮于水面,如下图,回形针在地球 的作用下,静止后指向南北。参照冬季午间小草的影子偏向北方,进一步推测A端是回形针磁体的 极。
29.(2025·苏州)如图是控制车辆进出的电动闸门设计图。抬杆AB质量分布均匀,长度为3m,重为 20N,最右端B点处悬挂一重为25N 的铁柱,B点到支点O的距离为0.6m。开关S闭合后,调节滑动变阻器使抬杆AB处于水平静止状态。(忽略支点O处的摩擦)
(1)电磁铁上端为 (N/S)极;
(2)此时电磁铁对铁柱的吸引力为 N;
(3)要使抬杆A端从图示位置向上抬起,滑动变阻器的滑片P应向 端移动
30.(2025·苏州)以下是《电磁转换》的相关知识结构图,请你补充完整。
① ,② 。
31.(2025·扬州)某款人形机器人参加半程马拉松比赛,安装在腹部的摄像头相当于一个 .透镜,远处的物体成倒立、 的实像.该机器人跑步由电动机驱动,电动机的工作原理是磁场对 有力的作用.以并肩运动的陪跑员为参照物,机器人是 的.机器人跑完21km路程用时约为2 h40 min,平均速度约为 km/h.(计算结果保留整数)
三、作图题
32.(2025·威海) 闭合开关,小磁针静止时状态如图所示,请在括号内标出通电螺线管的极性,并在A点标出电流方向。
33.(2025·吉林) 如图所示,请标出通电螺线管的N极并在A点画出磁感线的方向。
34.(2025·广西)
(1)请在图中画出竖直悬挂着的粽子所受重力的示意图。
(2)我们应该警惕“光污染”。请在图中画出太阳光线A、B照射到玻璃幕墙后的反射光线。
(3)如图,某同学正确运用右手螺旋定则(安培定则)判断通电螺线管的磁极,请在图中标出流入螺线管的电流方向和通电螺线管的极。
35.(2025·遂宁) 按要求作图
(1)如图(a),拉行李箱时,可将行李箱视为杠杆,图(b)是其简化图,O为支点,A为行李箱的重心。请在图(b)中画出重力的示意图以及拉力F的力臂L。
(2)小聪将通电螺线管放入地球仪来模拟地磁场,请在右侧简图中,用箭头在A点标出该处磁感线方向,并在括号内用“+”或“-”标出电源下端的极性。
36.(2025·陕西)
(1)如图-1甲是中国古代科技著作(天工开物)中,利用杆秤测量弓最大弹力的方法——试弓定力,请在图-1乙中画出细绳对弓弦的拉力F的示意图。
(2)如图-2,请在虚线框中标出电源右侧的正负极和小磁针左侧的N、S极。
37.(2025·新疆)
(1)请根据图甲中的入射光线画出其通过凸透镜后的折射光线。
(2)请在图乙中画出空中飞行篮球所受重力的示意图。
(3)请根据图丙中静止的小磁针的指向,标出通电螺线管的电源的“+”极和“-”极。
38.(2025·扬州)按照题目要求作图.
(1)如图1,苹果静止在水平桌面上,作出苹果的受力示意图.
(2)如图2,根据小磁针静止时N极的指向,标出A 处的磁感线方向和电源正、负极.
(3)如图3,卫生间吸顶灯从A 点发出的一束光射向平面镜上的O点,画出入射光线和反射光线.
四、实验探究题
39.(2025·广东)
(1)如题图,玻璃砖的长度为 cm:体温计的读数为 ℃
(2)在测量石块的密度实验中,天平平衡时,右盘中的砝码和标尺上游码的位置如题图甲,则石块的质量为 g:如图乙,石块的体积为 cm3.经计算,石块的密度为 g/cm3.
(3)如题图,小磁针静止时N极指向右,则螺线管的右端为 极,将小磁针沿着图中轨迹缓慢移到Q处,下列符合小磁针a端旋转情况的是 。
A. B. C. D.
40.(2025·北京市)
某同学用如图所示的装置进行实验,使金属棒ab向左做切割磁感线运动,灵敏电流计指针向右偏转,说明回路中有电流产生,这是 现象。灵敏电流计指针偏转的方向可以反映电路中的电流方向,若要改变上述灵敏电流计指针偏转的方向,可进行的操作是 。
41.(2025·德阳) 电与磁之间存在着相互联系,彰显物理现象的对称之美。
(1)如图甲所示,导线通电后小磁针发生偏转,断电后小磁针复位。实验表明通电导线周围存在 ;
(2)如图乙所示为水位自动报警器的原理图。当水位到达金属块A时, 灯亮,控制电路中电磁铁的上端为 极(选填“S”或“N”);
(3)如图丙所示,电路中的开关为单刀双掷开关。
①将开关掷于1,观察到导体棒运动,说明 (选填字母);
A.电路中产生了感应电流 B.通电导体在磁场中受力的作用
②将开关掷于2,使导体棒向右运动,观察到灵敏电流计指针向左偏转;若要使灵敏电流计的指针向右偏转,可以 (选填字母)。
A.保持磁体不动,使导体棒向左运动
B.将磁体的磁极对调,使导体棒向左运动
42.(2025·福建) 降水量是指一段时间内,雨水(或融化后的固体降水)未经蒸发、渗透和流失所积聚起来的水层深度。为了监测降水量,科创小组制作了“翻斗式雨量计”,装置外观是上端开口的圆柱体,如图1甲。内部结构示意图如图1乙。装置核心部件如图1丙,它是用中间隔板分开的两个完全对称的三角形容器,可绕O点处的水平轴转动,从而使两侧容器轮流接水,当一侧容器接满10mL雨水时会发生翻转,将水倒出,随着降雨持续,翻斗左右翻转,过程如图1丁。磁铁与配重通过连杆安装在翻斗上并随翻斗左右摆动,当磁铁经过磁感应开关(两者相互作用力忽略不计)时,磁感应开关通过电流传感器将翻斗翻转信息变成电信号,从而推算降水量。
(1)翻斗在水平位置时是等臂杠杆,实验器材中属于等臂杠杆的有 。
(2)连杆上装有可调高度的配重。校准过程,若倒入的水量总是大于10mL时翻斗才发生翻转,可通过 (填“降低”或“升高”)配重在连杆上的位置进行调整。
(3)图2甲是翻斗翻转信息变为电信号的工作电路,电源电压不变,、为定值电阻,。某次降雨,电流传感器(电阻不计)测得电流随时间变化关系如图2乙。
①当磁铁每次经过磁感应开关时,开关状态是 。
②“翻斗式雨量计”顶端开口面积为0.1m2,由图2乙可知该地区30min内降水量约为 mm,降水量变化趋势是 。(测量前翻斗内无水)
③由图2可知, 。
(4)若该装置在我国北方地区使用,可改进的措施是 。
43.(2025·苏州)某科技小组要设计冬季植物大棚控温系统。
【任务与要求】当环境温度t≤20℃,加热设备开启工作:温度t≥30℃,停止工作,大棚内温度维持在一定范围。
【设计与实施]①器材有:电压为6V 的电源、定值电阻、可控加热设备、热敏电阻(阻值温度变化的关系如图甲)等。②设计的电路如图乙,加热设备是否工作由其两端的电压UAB来控制,当UAB≥4V时,加热设备开启工作,当UAB≤UB时,加热设备不工作。(不考加热设备对电路的影响)
【分析与思考】
(1)电路中的 (R1/R2)是热敏电阻;
(2)定值电阻的阻值为 Ω
(3)U0= V
(4)长时间使用后,电源电压降低,系统控制的最高温度将 。
五、科普阅读题
44.(2025·深圳)深圳大力推动无人机事业发展,已经将无人机用于运送急救AED装置
苏华同学发现无人机搭配北斗卫星导航,有四个旋翼,每个旋翼搭配独立的电动机驱动,相邻旋翼之间旋转方向相反;无人机空载总质量(含电池,不含AED)为9kg,电池能量密度为200W·h/kg,(质量能量密度是指满电时电池能量与电池质量之比),
俊宇同学购买了一个无人机,无人机满电开始测试;飞行分为前往过程和返回过程,前往和返回过程都分为竖直上升过程,水平匀速运动过程,竖直下降过程,且消耗能量相同;无人机前往过程中竖直上升和竖直下降过程消耗的总能量为3.2×109 J,水平匀速移动过程飞行每秒消耗的能量为2500J,总用时160s,无人机用于驱动飞行的电能转化效率为60%,无人机竖直下降后电池剩于总容量的50%,测试结束。
(1)璐璐同学指出:无人机的信号传输是通过 传递;
(2)粤鹏同学说ADE 电击时为什么不能碰人,因为人体 ;
(3)当俊宇购买的无人机空载时匀速向下降落2m,重力做功 J;
(4)无人机螺旋桨飞行时向下,无人机向上飞,善于思考的苏华同学发现通过桨叶旋转空气提供升力,这体现了力的作用是 ;
(5)顺顺同学经过观察,指出无人机各电动机之间是 联的;
(6)满电时,无人机的电池质量占空载质量的百分比 (保留一位小数);
(7)为了更快运送急救 AED装置,请你帮助璐璐同学对无人机设计提出一条建议 ;如何去更改螺旋桨的旋转方向
45.(2025·广东)巡检机器人可对高压输电线进行巡检,如题图,其相关参数见题表,机器人的电机可切换为电动机或发电机,水平匀速巡检时,蓄电池减少的储能全部用于电机产生的牵引力做
功.当蓄电池储能降至0.1E时,停止电能输出,巡检终止.下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,将能量储存起来.
质量m0 54kg
最大巡检速度v0 4km.h-1
营电池满电时储能E0 0.2kW·h
电动机最大输出功率P0 100W
(1)下坡时,发电机利用 原理发电
(2)请完成以下能量转化流程图 :
(3)若充满电的机器人保持P0、v0水平巡检1.2h,则巡检路程为 km,牵引力为 N,蓄电池储能剩余 kW·h.
(4)如题图巡检线路,当机器人到达A点时,蓄电池储能为0.95E0随后机器人先下坡巡检(电机切换为发电机),后水平巡检(电机切换为电动机),巡检全程速度大小保持不变.AB段重力势能减少量为1×105J.充电过程中,重力势能每减少1J,转化为电能并储存在蓄电池中的能量为0.45J.水平阶段机器人所受阻力大小是重力的0.15倍,则水平阶段匀速巡检的最大路程为 m.(g=10N/kg)
46.(2025·齐齐哈尔) 阅读短文,回答问题。
居家用气,安“燃”无恙
炒菜、做饭、取暖……燃气为我们生活带来了极大的便利。但在燃气使用过程中如发生泄漏或燃气具使用不规范的情况,会导致燃气事故的发生。为确保居家用气安“燃”无恙,燃气管理部门要求用户要安装家用燃气报警器。
图甲是某种燃气报警器部分电路示意图,控制电路中的为气敏电阻,的阻值与燃气浓度的关系如图乙所示。电源电压稳定,闭合开关和,报警器处于工作状态。当燃气浓度达到预设值时,电磁铁恰好能将衔铁吸下,工作电路中灯熄灭,灯发光、电铃响而报警(电磁铁线圈的阻值忽略不计)。
(1)燃气报警器的安装位置应根据被检测气体的密度确定,若家中使用天然气(主要成分是密度比空气密度小的甲烷),则燃气报警器应安装在燃气灶附近的 (选填“上”或“下”)方区域。
(2)图甲中,闭合控制电路的开关,电磁铁上端是 (选填“”或“”)极。当燃气浓度未达到预设值时,杆处于静止状态。若弹簧对端的拉力为动力,观察图甲可知,此时杆AOB是 (选填“省力”“等臂”或“费力”)杠杆。
(3)下列四幅图所示的原理与控制电路中电磁铁的工作原理相同的是( )
A.验电器工作原理
B.电流的磁效应
C.电磁感应现象
D.交流发电机原理
(4)若想将燃气报警器的预设值调低,在保证电路元件安全的前提下,可以采取的合理方法是 。(写出一种即可)
六、综合题
47.(2025·河南)随着科技的发展,机器人的应用日益广泛。人形机器人是一种模仿人类外观和行为的机器人,某兴趣小组以此为主题开展了研究。
(1)技术人员与人形机器人之间可通过无线网络传递信息,这是利用 (填“电磁波”或“超声波”)来实现的。机器人可通过安装在身上的电动机完成许多动作,电动机的工作原理是 。
(2)某跑步机器人在一次长跑性能测试中,跑完18km的路程用时2.5h,该机器人跑步的平均速度是多少?
(3)某工业机器人质量为70kg,搬着货物静止在水平地面上,脚与地面的总接触面积为0.05m2,此时对地面的压强为1.8x104Pa,该机器人所搬货物的质量是多少?(g取10N/kg)
答案解析部分
1.A
当车辆经过颠簸路面时,减震系统的上下运动带动电机内导体切割磁感线发电 ,原理为电磁感应;
A、闭合线圈做切割磁感线运动,产生感应电流,属于电磁感应,故A正确;
B、图为奥斯特实验,原理为电流的磁效应,故B错误;
CD、图中有电源,通电导线在磁场中收到力的作用而运动,故CD错误;
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机。
2.B
A.由图可知,电流从电磁铁的左端流入,右端流出,根据安培定则可知,电磁铁的右端为N极,左端为S极,故A错误;
BCD.当滑片P向左滑动时,滑动变阻器接入电路的电阻变小,根据欧姆定律可知,左侧控制电路中的电流变大,电磁铁的磁性增强,因巨磁电阻的阻值随周围磁场强度的增强而减小,所以此时巨磁电阻的阻值减小。在右侧工作电路中,电源电压不变,巨磁电阻阻值减小,根据欧姆定律可知,电路中的电流变大,根据P=I2R可知,指示灯的实际功率变大,指示灯会变亮,故B正确,CD错误;
故选B。
(1)根据安培定则,用右手握住螺线管,让四指指向螺线管中电流的方向,则大拇指所指的那端就是螺线管的N极;根据安培定则先判断出通电螺线管的极性;
(2)当滑片P向左滑动时,根据欧姆定律判定控制电路中电流的变化和电磁铁磁性强弱的变化,进而知道巨磁电阻的阻值的变化,根据欧姆定律判定工,作电路中通过灯泡电流的变化,根据P=I2R分析灯泡亮度的变化。
3.A
A.古代铜镜成像,属于平面镜成像,利用了光的反射原理,故A正确;
B.日晷测量时间利用了光沿直线传播的原理,故B错误;
C.用大小相同的力敲击不同的编钟时,产生的响度相同,音调不同,故C错误;
D.司南能够指南北是由于受到了地磁场的作用,而我国的北斗卫星导航系统是利用电磁波传递信息的,故D错误。
故选A。
(1)光线传播到两种介质的表面上时会发生光的反射现象,例如水面上出现岸上物体的倒影、平面镜成像、玻璃等光滑物体反光都是光的反射形成的;
(2)光在同种、均匀、透明介质中沿直线传播,产生的现象有小孔成像、影子的形成、日食和月食等;
(3)响度是指声音的大小,跟距声源的远近和振幅有关;
(4)地球的周围存在磁场。
4.B
通电导体在磁场中受到力的作用,受力方向与两个因素有关:一个是磁场方向,另一个是电流方向。所以若要使ab向左运动,可以改变电流的方向或改变磁场的方向,故B正确,ACD错误。
故选B。
通电导体在磁场中受到力的作用,受力方向与两个因素有关:一个是磁场方向,另一个是电流方向。如果只改变一个因素,则导体受力方向改变,如果同时改变两个因素,则导体受力方向不变。
5.D
由图可知,电路时串联的,电流从电磁铁的下方流入,上方流出,根据安培定则可知,电磁铁的上方为N极,而磁铁的下方也为N极,根据磁极间的相互作用可知,电磁铁与磁铁会相互排斥;向右缓慢移动滑动变阻器滑片,滑动变阻器接入电路的阻值变大,根据欧姆定律可知,电路中的电流会变小,电磁铁的磁性会减弱,电磁铁与磁铁间的排斥力会减小,悬挂磁铁的弹簧长度会变长,故ABC错误,D正确。
故选D。
1.分析电路中电流流向,根据安培定则判断电磁铁的极性,根据磁极间的相互作用判断电磁铁与磁铁之间的作用;
2. 向右移动滑片,滑动变阻器的最值变大,根据欧姆定律分析电路中电流的变化,根据电流变化分析电磁铁的磁性强弱变化,以此分析弹簧的长度变化;
3.电磁铁的磁性强弱与电流大小和线圈匝数有关,线圈匝数一定时,电流越大,电磁铁磁性越强;电流大小一定时,电磁铁的线圈匝数越多,磁性越强。
6.A
A.根据同名磁极相互排斥可知,将铁棒一端靠近小磁针N极,N极被排斥,说明铁棒的一端为N极,可以证明铁棒由磁性,故A正确;
B.根据“磁体能够吸引铁、钴、镍等物质”可知,将铁棒一端靠近小磁针N极,N极被吸引,不能证明铁棒有磁性,故B错误;
CD.根据“同名磁极相互排斥,异名磁极相互吸引”可知,若铁棒有磁性,则小磁针的一端应与铁棒的一端吸引,另一端排斥,同理铁棒的一端应与小磁针的一端吸引,另一端排斥, 故CD错误。
故选A。
1.磁体能够吸引铁、钴、镍等物质;
2.同名磁极相互排斥,异名磁极相互吸引。
7.A
A、通电导线周围存在磁场使得小磁针发生偏转,故A正确;
B、乙图中变量为匝数,说明 电磁铁磁性强弱与匝数多少有关,故B错误;
C、图中没有电源,表明闭合线圈做切割磁感线运动会产生感应电流,故C错误;
D、图中有电源, 说 明通电导体在磁场中要受到力的作用 ,D错误;
综上选A。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
8.D
A.飞机的升力是由于机翼上下表面气流速度不同,导致上方空气流速大、压强小,下方空气流速小、压强大,从而产生向上的压力差,即升力,故A正确不合题意;
B.三峡大坝设计成上窄下宽,是因为水的压强随深度增加而增大,大坝底部需要承受更大的水压,所以要更宽以保证结构稳定,故B正确不合题意;
C.发电机是利用电磁感应原理,将其他形式的能源转化为电能,闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中就会产生感应电流,故C正确不合题意;
D.验电器的工作原理是同种电荷相互排斥,故D错误符合题意。
故选D。
A.流体流速越大的位置,压强越小;
B.根据液体压强的特点判断;
C.根据发电机的工作原理判断;
D.根据验电器的工作原理判断。
9.D
A.电铃是利用电流的磁效应来工作的,故A不符合题意;
B.该装置是发电机的原理图,是利用电磁感应现象来工作的,故B不符合题意;
C.奥斯特实验说明通电导体的周围存在磁场,故C不符合题意;
D.该装置是电动机的原理图,故D符合题意。
故选D。
电动机是利用通电导体在磁场中受力运动的原理制成的。
10.D
A.由图可知,电流由线圈的右侧流入,左侧流出,由安培定则可知,铁钉的钉尖是N极,故A错误;
B.铁钉的钉尖是N极,由异名磁极相互吸引可知,缝衣针的针尖是S极,故B错误;
C.地球是一个大磁体,地磁南极(S)在地理北极附近,地磁北极(N)在地理南极附近,故C错误;
D.缝衣针的针尖是S极,移开电磁铁后,受地磁场的作用,缝衣针静止时针尖所指方向为南,故D正确。
故选D。
A.根据安培定则判断出铁钉的磁极;
B.同名磁极相互排斥,异名磁极相互吸引;
C.地球是一个大磁体,地磁南极在地理北极附近,地磁北极在地理南极附近,由于受到地磁场的作用,放入地磁场的磁体都受到地磁场的作用;
D.地磁场的作用,指南针的N极指北,S极指南。
11.D
由题意可知,自动导引车经过布置在地上的磁钉时,会产生感应电流,其工作原理为电磁感应现象。
A.该图是奥斯特实验,其原理是电流的磁效应,故A不符合题意;
B.该图是探究通电导体在磁场中受力运动的实验,故B不符合题意;
C.图中有电源,是电动机原理图,电动机是利用通电导体在磁场中受力的作用而运动制成的,故C不符合题意;
D.图中没有电源,是发电机原理图,是利用线圈在磁场中做切割磁感线运动,产生感应电流制成的(即电磁感应现象),故D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动时,会产生电流,这种电流叫感应电流,这一现象叫电磁感应现象。
12.D
D、轮船制动时 ,闭合线圈做切割磁感线运动,机械能转换为电能,原理为电磁感应,D正确;
A、属于电流的磁效应,故A错误;
B、有电源,属于通电导体在磁场中受到力的作用,故B错误;
C、司南受到地磁场的作用,勺把指向地理的南方,故C错误。
综上选D。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
13.A
电烤箱的工作原理为电流的热效应,和电蒸锅的工作原理相同,洗衣机、电风扇、电冰箱工作室都有电动机,工作原理为通电导线在磁场中受到力的作用,故A正确,BCD错误。
综上选A。
1、电流的热效应:原理为焦耳定律Q=I2Rt,所以产热量和电阻成正比,和电流的平方成正比;
2、通电导线在磁场中受到力的作用,实例有:电动机。
14.D
由题意可知,该手电筒有线圈,使用时将它来回摇晃,线圈在磁场中就做切割磁感线运动,此时线圈中有感应电流产生,所以此手电筒发电的原理是电磁感应现象,来回运动的物体是导体,应该是磁铁块,故ABC不符合题意、D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动,导体中产生感应电流。
15.A
A.指南针具有磁性,在地磁场中会发生偏转,指示南北,故A正确;
B.温度计是利用液体的热胀冷缩原理来测量温度,与地磁场无关,故B错误;
C.连通器与液体压强的特点有关,与地磁场无关,故C错误;
D.电磁继电器是利用电流的磁效应,与地磁场无关,故D错误。
故选A。
根据各个选项中仪器的工作原理分析判断。
16.B
A、灯泡发光说明电路有电流, 转动铁棒,电机的线圈做切割磁感线运动,产生感应电流,A错误,B正确。
C、转动铁棒,机械能转换为电能,C错误;
D、铁棒反向转动,仍然做切割磁感线运动,产生感应电流,灯泡发光,故C错误。
综上选D。
1、电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
2、利用电磁感应制作的机械有:发电机,能量转化为机械能转化为电能。
17.B
A、发电机利用的是电磁感应原理,故A错误;
B、洗衣机转动时,利用电动机进行工作,故B正确;
C、电视机工作时将电能转化为光能和声能,和电动机的工作原理不同,故C错误;
D、汽油机利用的热机,故D错误。
综上选B。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、汽油机是利用热机进行工作的;
3、通电导线在磁场中受到力的作用,实例有:电动机。
18.B
A、扬声器发声的工作原理为通电导线在磁场中受力,故A错误;
B、闭合开关,通电螺线管产生磁性,吸引衔铁使得敲击铃碗,故B正确。
C、 同名磁极相斥 ,使得小车相互排斥,远离,故C错误;
D、通电导线周围存在磁场,使得小磁针偏转,故D错误。
综上选B。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
19.D
动圈式话筒把声信号转变为电信号,其工作原理是电磁感应现象。
A.图中反映的是磁极间的相互作用规律:同名磁极互相排斥,异名磁极互相吸引,故A不符合题意;
B.电路接通后,小磁针发生偏转,说明通电导体周围存在磁场,故B不符合题意;
C.电流相同时,电磁铁的线圈匝数越多,磁性越强,吸引大头针的数量越多,故C不符合题意;
D.闭合开关,当导体ab在磁场中切割磁感线时,电流表指针摆动,说明有感应电流产生,这是电磁感应现象,故D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动时,电路中会产生感应电流,这种现象叫做电磁感应。
20.D
A.如图是司南,利用的是同名磁极相互排斥,异名磁极相互吸引,故A错误;
B.如图是电磁铁的利用,电磁铁通电后具有磁性,利用的是电流的磁效应的原理,故B错误;
C.如图是通电导体在磁场中受到力的作用,是电动机的工作原理,故C错误;
D.如图的是闭合电路的线圈在磁场中做切割磁感线运动时,线圈中就会产生电流,是电磁感应现象,属于发电机的工作原理,故D正确。
故选D。
发电机的工作原理是电磁感应,即闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中就会产生感应电流。
21.C
磁悬浮地球仪利用了同名磁极相互排斥的原理。
A.图中实验探究了通电导体在磁场中受到力的作用,故A不合题意;
B.图中实验探究了电磁感应现象,故B不合题意;
C.图中实验的原理是同名磁极相互排斥,故C符合题意;
D.图中实验的原理是通电导体周围存在磁场,故D不合题意。
故选C。
磁悬浮地球仪利用了同名磁极相互排斥的原理,据此可逐一分析判断。
22.磁场;N
根据奥斯特发现的电流的磁效应可知,螺线管周围存在磁场,根据安培定则可知,通电螺线管上端为N,所以 叶轮下端的磁极是 N极。
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关;
磁极相互作用:同名磁极相互排斥、异名磁极相互吸引。
23.南;南
根据同名磁极相互排斥,异名磁极相互吸引可知,罗盘小磁针的北极指向地磁场的南极;
地磁南北极与地理南北极是相反的,所以地磁场的北极在地理的南极附近。
1.磁极间的相互作用:同名磁极相互排斥,异名磁极相互吸引;
2.地磁南北极与地理南北极是相反的。
24.不偏转;偏转
导体静止不动时 ,不做切割磁感线运动,没有感应电流产生,电流计指针不转动,导体向右运动,做切割磁感线运动,产生感应电流,所以电流计指针偏转。
电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
25.大气压;磁
(1) 吸盘安装在吊车上,抽出空气后,吸盘内部气压小于外界大气压,外界大气压就会将吸盘紧紧压在玻璃板上,从而“吸”起大块玻璃板,这是利用了大气压的作用。
(2)电磁铁通电后具有磁性,能够吸引钢铁等磁性物质,而电磁铁是利用电流的磁效应工作的,即通电导体周围存在磁场,所以这里是利用电流的磁效应。
(1)抽出空气后,吸盘内外气压不同,据此分析;
(2)通电导线周围存在磁场,电磁铁是利用电流的磁效应工作的。
26.(1)磁场;S
(2)变大
(3)减小
(1)电磁铁的工作原理为通电导体周围存在磁场,根据安培定则可知,电磁铁上端为S极,下端为N极。
(2)据图2可知,随着K的增加,气敏电阻的阻值会减小,电源电压不变,根据欧姆定律U=IR可知,电路的电流变大。
(3)电源电压减小时,需要气敏电阻更小才能达到报警时的电流,题目要求空气质量不变,所以气敏电阻的阻值不变,只能降低定值电阻的阻值。
1、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
2、串联电路的电路规律:串联电路,电流处处相等,电源的电压为用电器电压之和,总电阻为用电器电阻之和。
3、电压表与待测用电器并联测量电压,电流表串联测量用电器电流,根据欧姆定律U=IR计算用电器的电流和电阻以及电压。
27.磁场;运动状态
(1)当电路中有电流时,根据电流的磁效应可知,导线周围产生磁场;
(2)磁针在磁场中会受到力的作用,而力可改变物体的运动状态,所以磁针发生偏转,偏转角度就能反映电流大小。
(1)通电导体周围存在磁场;
(2)磁场对放入其中的磁体有力的作用,力可以改变物体的运动状态。
28.磁场;S
地球是一个巨大的磁体,磁化后的回形针具有磁性,将其放在树叶上,漂浮于水面,则回形针在地球磁场的作用下,静止后会指南北两个方向。小草的影子偏向北方,根据影子的形成原理可知太阳南方,地理南方附近是地磁北极,根据磁极间的相互作用规律可知回形针磁体指南方的是S极,即推测A端是回形针磁体的S极。
地球是一个大磁体,地球周围存在的磁场叫地磁场。 当磁体自由转动并静止下来时,指南的一端为南极,指北的一端为北极,据此分析解答。
29.(1)S
(2)5
(3)上
(1)由图可知,电流由螺线管的下端流入,由安培定则可知,电磁铁的下端为N极,上端为S极;
(2)由图可知,抬杆AB实质是一个杠杆,AB的重心到支点O的距离为:L阻=AB-OB=×3m-0.6m=0.9m,L动=OB=0.6m,
B端受到的拉力大小等于铁柱的重力大小与电磁铁对铁柱的吸引力大小之和,根据杠杆的平衡条件可得:
G杆L阻=(G铁+F)L动,
则:20N×0.9m=(25N+F)×0.6m,
解得:F=5N;
(3)要使抬杆A端从图示位置向上抬起,应增加电磁铁对铁柱的吸引力,即增大电磁铁的磁性,因此应将滑动变阻器的滑片P应向上端移动,减小电路中的电阻,增大电路中的电流。
(1)根据安培定则判断电磁铁的磁极;
(2)由图可知,B端受到的拉力大小等于铁柱的重力大小与电磁铁对铁柱的吸引力大小之和,根据杠杆的平衡条件解答;
(3)电磁铁的磁性大小与电流的大小有关,通过的电流越大,电磁铁的磁性越强。
30.磁效应;发电机
奥斯特实验说明:通电导线周围存在磁场,即电流的磁效应;发电机的原理是电磁感应现象。
根据对奥斯特实验现象的理解解答。根据对电磁感应现象应用的知识解答。
31.凸;缩小;电流;静止;8
机器人身体上安装有摄像机,其镜头相当于一个凸透镜,远处的物体在镜头的二倍焦距外,根据凸透镜磁性规律,此时成倒立、缩小的实像;
机器人内的电动机带动机器人跑步,电动机消耗电能,工作原理是磁场对电流有力的作用;
以并肩运动的陪跑员为参照物,机器人相对于陪跑员没有位置变化,是静止的;
根据机器人的路程21km,用时约为,计算平均速度约为。故第1空填:凸;第2空填:缩小;第3空填:电流;第2空填:静止;第5空填:8。
摄像机的镜头是凸透镜,当物体在凸透镜的二倍焦距外,成倒立缩小的实像;电动机的工作原理是磁场对电流的作用;相对于参照物,没有位置变化,物体的静止的;根据,计算速度。
32.
小磁针的N极为磁场的方向,所以通电螺线管右端为N极,根据安培定则可知,电源左端为正极,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
33.
根据安培定则可知,左端为N极,磁感线方向为N极出发回到S极,所以A的磁感线方向水平向右,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关
磁感线: 在磁场中画一些曲线,使曲线上任何一点的切线方向都跟这一点的磁场方向相同,磁感线是人为假想表征磁场方向和强弱的 的物理量,磁感线从N极出发,回到S极。
34.(1)
(2)
(3)
(1)重力方向竖直向下,据此作图:
(2)平面镜反射遵循反射射角等于入射角,据图可知反射光线已知,过反射点做垂直平面镜的法线,据此做出反射光线。
(3)据图可知,大指拇指向即为N极,其余4指的方向为电流方向,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
反射定律:反射角等于入射角,反射光线、入射光线、法线处于同一平面、在反射中光路是可逆的。
重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
35.(1)
(2)
(1)力的方向是竖直向下的,从物体重心A画一条带箭头的竖直向下的有向线段,用G表示,
支点在O处,反向延长力F的作用线,从支点O做F的垂线,该垂线段为动力F的力臂L,如图所示:
(2) 地球的地磁南极在地理北极附近,地磁北极在地理南极附近。要模拟地磁场,通电螺线管的上端应为S极,下端应为N极。在磁体外部,磁感线总是从N极出发回到S极,所以A点处磁感线方向是向上的。根据安培定则(右手螺旋定则),用右手握住螺线管,大拇指指向N极(下端),则四指弯曲的方向为电流的方向,可判断出电流从电源的上端流出,下端流入,所以电源下端的极性为“-”。作图如下:
(1)①根据重力的方向是竖直向下的,从物体重心做竖直向下的力即可。
②力臂的作法:从支点向力的作用线作垂线段,作出动力F1的力臂L。
(2) 地球的地磁南极在地理北极附近,地磁北极在地理南极附近,可判断出通电螺线管的磁极,再根据安培定则判断出电流的方向从而找到电源的正负极。
36.(1)
(2)
弓弦受到弓和物体的重力,方向竖直向下,受到绳子的拉力,竖直向上,据此作图:
(2)磁感线方向为磁针N极指向,右侧的方向向左,所以N极向左,根据安培定则分析电流流向,可知右侧为负极,据此作图:
1、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关;;
2、重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
37.(1)
(2)
(3)
(1)凸透镜对光线有会聚作用,平行主光轴的光线经过凸透镜会折射,折射光线经过焦点,据此作图:
(2)重力的方向竖直向下,据此作图:
(3)小磁针N极指向左,所以磁感线方向向左,右端为N极,根据安培定则可知左端为正极,据此作图:
1、重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
2、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
3、透镜成像规律:凸透镜对光线有汇聚作用,平行光入射凸透镜会聚焦在焦点,经过光心的光线不发生偏折。
38.(1)
(2)
(3)
(1)图1中,苹果在水平桌面静止,受到平衡力,苹果受到竖直向下的重力,受到竖直向上的支持力,作用点在重心,两个力在同一直线上,分别画出竖直向下的重力G,竖直向上的支持力F,如图 ;
(2)图2中,小磁针的N极在左侧,则右侧是S极,根据磁极间相互作用,通电螺线管的左侧是N极,磁体的外部,磁场方向从N极指向S极,A点磁场方向指向右;根据安培定则,右手大拇指在通电螺线管的左侧,四指方向为电流方向,则电源的右侧是正极,左侧是负极,如图 ;
(3)图3中,光线从A点射向O点,连接AO为入射光线,过O作平面镜的垂线为法线,反射光线和入射光线在法线两侧,反射角等于入射角,画出反射光线,如图。
(1)静止的苹果受到竖直向下的重力,竖直向上的支持力,二力平衡时,力的大小相等;
(2)根据磁极间相互作用,判断通电螺线管的磁极位置,磁体外部的磁场方向从N极指向S极;根据安培定则判断通电螺线管的电流方向;
(3)光在反射时,反射角等于入射角。
39.(1)4.65;36.4
(2)26.2;10;2.62
(3)N;D
(1)刻度尺的分度值为1mm,左端与0刻度对齐,玻璃砖的长度为4.65cm;
体温计的分度值为0.1℃,读数为36.4℃;
(2)游码标尺的分度值为0.2g,石块的质量为:
m=20g+5g+1.2g=26.2g;
(3)图丙中水和石块的总体积为30cm3,水的体积为20cm3,石块的体积为:
V=30cm3-20cm3=10cm3,
石块的密度为:
。
(4)小磁针静止时N极指向右,左端是S极,与螺线管的右端相对,根据异名磁极相互吸引可知,螺线管的右端为N极,左端为S极,将小磁针沿着图中轨迹缓慢移到Q处,a端始终与螺线管右端吸引,小磁针将逆时针转动,直到移到Q处,故ABC错误,D正确。
故选D。
故答案为:(1)4.65;36.4;(2)26.2;10;2.62;(3)N;D。
(1)根据刻度尺和体温计的分度值读数;
(2)物体的质量等于砝码的质量加游码在标尺上所对的刻度值;读出石块和水的总体积,用总体积减去水的体积计算出石块的体积,根据公式得出石块的密度;
(3)根据异名磁极相互吸引分析螺线管的南北极及小磁针旋转的方向。
40.电磁感应;将磁体的磁极对调或使金属棒ab向右做切割磁感线运动
由图可知,闭合电路中,金属棒ab向左做切割磁感线运动,灵敏电流计指针向右偏转,说明回路中有电流产生,这是电磁感应现象;
感应电流的方向与磁场方向和导体切割磁感线运动的方向有关,当磁场方向或导体切割磁感线运动的方向改变时,感应电流的方向发生改变;当磁场方向和导体切割磁感线运动的方向同时改变时,感应电流的方向不变,由此可知,要改变上述灵敏电流计指针偏转方向,即改变电流的方向,可进行的操作是:将磁体的N、S对调,仍使金属棒ab向左做切割磁感线运动(或保持磁体的N、S不变,使金属棒ab向右做切割磁感线运动)。
闭合电路的一部分导体在磁场中做切割磁感线运动时,电路中会产生电流,这种现象叫电磁感应现象;
感应电流的方向与磁场方向和导体切割磁感线运动的方向有关,当磁场方向或导体切割磁感线运动的方向改变时,感应电流的方向发生改变;当磁场方向和导体切割磁感线运动的方向同时改变时,感应电流的方向不变,由此可知要改变上述灵敏电流计指针偏转方向的操作。
41.(1)磁场
(2)红;S
(3)B;A
(1) 导线通电后小磁针发生偏转 ,断电后小磁针不偏转,所以通电导线周围存在磁场;
(2) 当水位到达金属块A时 ,水作为导体可以导电所以衔铁吸引下来,红灯亮,根据安培定则可知上端为S极。
(3) 将开关掷于1, 电路中存在电源,此时通电导线在磁场中受到力的作用而运动。B正确,A错误。
将开关掷于2, 此时导体做切割磁感线运动,产生感应电流,感应电流的方向和导体切割磁感线的方向、磁场的方向有关,所以要使得电流的方向发生偏转,可以单独变换磁场方向或者导体切割磁感线的方向,故A正确,B错误。
综上选A。
1、电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
2、利用电磁感应制作的机械有:发电机,能量转化为机械能转化为电能。
3、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转。
4、通电导线在磁场中受到力的作用,实例有:电动机。
42.(1)托盘天平
(2)降低
(3)闭合;1.2;减弱;200
(4)低温天气,增加加热装置;若降水量偏小,可以降低配重的高度并重新校准参数
(1)实验器材中属于等臂杠杆的有托盘天平、定滑轮等;
(2)倒入的水量总是大于10mL时翻斗才发生翻转,说明配重的力臂过大,可降低配重的位置减小力臂;
(3)①由图2乙可知,电流每隔一段时间后会变大,但时间较短;
电流变大且时间很短的原因是磁铁每次经过磁感应开关,使开关闭合,将R1短路,电路总电阻变小,电流变大,而经过的时间很短,故电流维持时间较短,
由此当磁铁每次经过磁感应开关时,开关状态是闭合;
②由图2乙可知,30min内有12次电流变化,即翻斗左右摆动了12次,每次倒水10mL,一共倒水120mL=120cm3=1.2×10-4m3;
顶端开口面积为0.1m2,则降水量为;
③由图2乙可知,电流变化的时间间隔变长,即翻斗每次倒水的时间间隔变长,说明降水量变小;
由图2可知,磁感应开关断开时,电流较小为5mA=5×10-3A,磁感应开关闭合时,电流较大为25mA=25×10-3A,
根据欧姆定律,有:U=5×10-3A×(800Ω+R2),U=25×10-3A×R2,U为电源电压,
解得:U=5V,R2=200Ω;
(4)若该装置在我国北方地区使用,北方地区气温较低且降水量较少,为防止降下的雨水结冰可增加加热装置,同时降水量少的情况下防止装置测量误差较大,
(1)实验器材中属于等臂杠杆的有托盘天平、定滑轮等;
(2)倒入的水量总是大于10mL时翻斗才发生翻转,说明配重的力臂过大,可降低配重的位置减小力臂;
(3)①由图2乙可知,电流每隔一段时间后会变大,但时间较短原因是磁铁每次经过磁感应开关,使开关闭合,将R1短路,电路总电阻变小,电流变大,而经过的时间很短,故电流维持时间较短;
②由图2乙可知,30min内有12次电流变化,即翻斗左右摆动了12次,每次倒水10mL,一共倒水120mL,用降水总体积除以开口面积得到降水量;
③由图2中,对5mA和25mA两个电流值的状态下,分别使用欧姆定律,联立两式可求出R2的阻值;
(4)若该装置在我国北方地区使用,北方地区气温较低且降水量较少,为防止降下的雨水结冰可增加加热装置,同时降水量少的情况下防止装置测量误差较大,可以通过降低配重的高度来调大装置的灵敏度。
43.(1)R1
(2)80
(3)3
(4)降低
(1)由图乙可知,R1与R2串联,加热设备并联在R1两端。由图甲可知,当温度降低时,热敏电阻的阻值变大,根据串联电路的分压关系可知,热敏电阻两端的电压变大,当温度降低到一定程度时,AB两端的电压增大到一定程度,此时加热设备要开启工作,故电路中的R1是热敏电阻;
(2)由图甲可知,当t=20℃时,热敏电阻的阻值:R1=160Ω,此时UAB=4V,
根据串联电路的电压规律可得,定值电阻两端的电压:U2=U-UAB=6V-4V=2V,
根据串联电路的分压关系可得,定值电阻的阻值:;
(3)由图甲可知,当t=30℃时,热敏电阻的阻值:R'1=80Ω=R2,
根据串联电路的电阻和欧姆定律可得,电路中的电流:,
此时AB两端的电压:U0=U'AB=IR'1=
A×80Ω=3V;
(4) 长时间使用后,电源电压降低,由于控制电压不变,根据串联电路的电压规律可知,定值电阻两端的电压变小,根据可知,在UAB和R2一定时,U2变小,系统控制的最高温度对应热敏电阻的阻值变小,由图甲可知,系统控制的最高温度升高。
(1)由图乙可知,R1与R2串联,加热设备并联在R1两端。由图甲可知,当温度降低时,热敏电阻的阻值变大,根据串联电路的分压关系可知,热敏电阻两端的电压变大,当温度降低到一定程度时,加热设备开启工作,由此判断电路中的热敏电阻;
(2)由图甲可知,当t=20℃时,热敏电阻的阻值大小,此时UAB=4V,根据串联电路的电压规律可得定值电阻两端的电压,根据串联电路的分压关系可得定值电阻的阻值大小;
(3)由图甲可知,当t=30℃时,热敏电阻的阻值大小,根据串联电路的电阻和欧姆定律求电路中的电流,进一步求得AB两端的电压。
(4) 长时间使用后,电源电压降低,由于控制电压不变,根据串联电路的电压规律可知,定值电阻两端的电压变小,根据串联电路的分压关系可知系统控制的最高温度对应热敏电阻的阻值变化,从而可知系统控制的最高温度变化。
44.(1)电磁波
(2)是导体,容易导电
(3)180
(4)相互的
(5)并
(6)22.2
(7)增大电动机的功率;改变通过电动机的电流方向
(1)远距离信息传播是通过电磁波进行传递的;
(2) 电击时为什么不能碰 人,是由于人为导体,容易导电;
(3) 无人机空载时 重力G=mg=9kg×10N/kg=90N,做功为W=Gh=90N×2m=180J;
(4) 无人机螺旋桨飞行时向下,无人机向上飞 ,是由于螺旋桨飞行时向下,给与空气向下的力,根据力作用的相互性,空气会为无人机提供向上的力;
(5) 每个旋翼搭配独立的电动机驱动,所以无人机电动机之间是并联的;
(6) 无人机前往过程中竖直上升和竖直下降过程消耗的总能量为3.2×109/J,水平匀速移动过程飞行每秒消耗的能量为2500J,总用时160s , 无人机用于驱动飞行的电能转化效率为60%, 所以消耗的能量, 无人机竖直下降后电池剩于总容量的50%, 所以电池的储电量为400W·h,电池能量密度为200W·h/kg ,所以电池的质量为2kg, 无人机的电池质量占空载质量的百分比
(7) 更快运送急救 AED装置 ,则需要在更短的时间做更多的功, 所以需要增加电动机的动力,螺旋桨的原理为通电导线在磁场中受到的力的作用,所以改变电流方向可以改变螺旋桨的旋转方向。
1、家庭安全用电原则:不同时使用功率较大的电器,避免电路中功率较大导致电流较大,引发火灾、不湿手接触用电器开关、不在电线上上晾衣服,金属外壳要接地,避免发生触电;
2、信息的传递:无线网络通信依靠电磁波来传递信息;
3、相互作用力:作用力是相互的,施力物体也是受力物体。特点为大小相等、方向相反、作用在两个物体上;
4、电路的串并联:串联:电路元件首位相连,用电器相互干扰,并联:电路元件首首相连,用电器互不干扰,开关在干路上控制整个电路的通断,开关在支路上控制单个支路的通断;家庭、公共场所的电路为并联电路;
5、功的计算:总功为W=Fs,总功包括两部分,有用功和额外功,其中有用功就本题目来说是克服重力做功即W有=Gh;
6、通电导线在磁场中受到力的作用,实例有:电动机。
45.(1)电磁感应
(2)化学
(3)4.8;90;0.08
(4)8000
(1)下坡时,发电机利用电磁感应原理发电;
(2)下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,蓄电池将电能转化为化学能储存起来;
(3)若充满电的机器人保持P0、v0水平巡检1.2h,则巡检路程为:
s=v0t=4km/h×1.2 h=4.8km;
牵引力为:
,
蓄电池储能剩余:
E=E0-P0t=0.2kW h 0.1kW×1.2h=0.08 kW h;
(4)由题意可知,AB段转化为的电能为:
1×105J×0.45=4.5×104J=0.0125 kW h,
机器人到达B点时,蓄电池储能为:
0.95E0+0.0125 kW h=0.95×0.2 kW h+0.0125 kW h=0.2025 kW h,
0.2025 kW h>0.2kW h,
即超过了蓄电池满电时储存的电能,所以此时蓄电池实际储能为0.2kW h;
由题可知,当蓄电池储能降至0.1E0时,停止电能输出,巡检终止,
所以水平阶段可用的电能为:
0.2kW h 0.1×0.2kW h=0.18kW h=6.48×105J;
水平阶段的牵引力为:
F=f=0.15G=0.15×54kg×10N/kg=81N,
则水平阶段匀速巡检的最大路程为:
。
故答案为:(1)电磁感应;(2)化学;(3)4.8;90;0.08;(4)8000。
(1)发电机的原理是电磁感应现象;
(2)下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,将能量以化学能的行驶储存起来。
(3)根据s=v0t算出巡检路程,根据算出牵引力,根据E=E0-P0t算出剩余蓄电池的储能;
(4)根据“重力势能每减少1J,转化为电能并储存在蓄电池中的能量为0.45J”算出AB段转化的电能;进而算出蓄电池储能和水平阶段可用的电能,根据水平阶段机器人所受阻力大小是重力的0.15倍算出水平阶段牵引力,根据W=Fs算出水平阶段最大路程。
46.(1)上
(2)N;费力
(3)B
(4)减小的阻值/增大电源电压
(1)天然气主要成分是甲烷,其密度比空气小。燃气泄漏时,天然气会向上扩散,所以燃气报警器应安装在燃气灶附近的上方区域,以便及时检测到泄漏的燃气。
(2)根据安培定则,用右手握住螺线管,让四指指向螺线管中电流的方向,则大拇指所指的那端就是螺线管的N极。在图甲控制电路中,电流从电磁铁的下端流入,上端流出,所以电磁铁上端是N极。对于杠杆AOB,弹簧对A端的拉力为动力,电磁铁对B端的吸引力为阻力,支点为O。观察图可知,动力臂小于阻力臂,根据杠杆分类,动力臂小于阻力臂的杠杆是费力杠杆,所以此时杠杆AOB是费力杠杆。
(3)控制电路中电磁铁的工作原理是电流的磁效应,即通电导体周围存在磁场。
A图验电器的工作原理是同种电荷相互排斥;
B图所示是奥斯特实验,演示了电流的磁效应,与电磁铁工作原理相同;
C图所示是电磁感应现象,是闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中产生感应电流;
D图所示是交流发电机工作原理,属于电磁感应现象。
故选B。
(4)由图乙知,燃气浓度越低,气敏电阻R1阻值越大。根据欧姆定律可知,在电源电压U一定时,电磁铁能将衔铁吸下报警即控制电路中电流一定,则电路总电阻不变,由串联电路电阻规律知要使燃气浓度较低,即R1阻值大时报警,可以减小滑动变阻器R2的阻值;或者换用电压更高的电源,也能使燃气报警器的预设值调低。
(1)根据密度比空气小的气体会向上扩散分析。
(2)根据安培定则,判断螺线管的N极。根据杠杆分类,动力臂小于阻力臂的杠杆是费力杠杆。
(3)控制电路中电磁铁的工作原理是电流的磁效应,即通电导体周围存在磁场;验电器的工作原理是同种电荷相互排斥;奥斯特实验演示了电流的磁效应;电磁感应现象是闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中产生感应电流,是发电机的工作原理。
(4)由图乙知,燃气浓度越低,气敏电阻R1阻值越大。根据欧姆定律知电压和电流不变时,电阻不变,由串联电路电阻规律知要使燃气浓度较低,即R1阻值大时报警,可以减小滑动变阻器R2的阻值或者换用电压更高的电源。
47.(1)电磁波;通电导线在磁场中受到力的作用(或通电线圈在磁场中受到力的作用而转动)
(2)解:机器人跑步的平均速度
(3)解:机器人对地面的压力
机器人和货物的总质量
货物的质量
(1) 技术人员与人形机器人之间可通过无线网络传递信息,这是利用电磁波实现的,电动机的原理是磁场对电流有力的作用,使得通电线圈在磁场中受力转动。
(1)无线网络通过电磁波传递信息;电动机利用磁场对电流的作用力工作的;
(2)根据计算速度;
(3)根据压强公式F=pS计算压力,压力等于总重力结合重力公式G=mg计算。
21世纪教育网(www.21cnjy.com)
一、选择题
1.(2025·威海) 我国某品牌电动汽车的减震系统具有能量回收功能:当车辆经过颠簸路面时,减震系统的上下运动带动电机内导体切割磁感线发电。下列选项中与其工作原理相同的是( )
A. B.
C. D.
2.(2025·黑龙江) 如图,电路中的GMR是巨磁电阻(其阻值随周围磁场强度的增强而减小),当开关S1和S2闭合时,将滑片P向左移动,下列说法正确的是( )
A.电磁铁右端为S极
B.指示灯会变亮
C.巨磁电阻的阻值会变大
D.电磁铁上的线圈中的电流会变小
3.(2025·黑龙江) 下列图片展示的是我国古代劳动人民智慧的成果,下列说法中正确的是( )
A.古代铜镜成像利用了光的反射原理
B.日晷测量时间利用了光的反射原理
C.用大小相同的力敲击不同的编钟会产生响度不同的声音
D.司南的工作原理与我国的北斗卫星导航系统相同
4.(2025·广东)题图所示实验中,闭合开关,导体ab向右运动,下列操作能让导体ab向左运动的是
A.改变电压大小 B.改变电流方向
C.改变电流大小 D.改变导体ab长度
5.(2025·宜宾) 如图,磁铁S极与弹簧连接,竖直悬挂于电磁铁的正上方,电源电压不变。闭合开关后,向右缓慢移动滑动变阻器滑片,下列判断正确的是( )
A.电路中的电流变大 B.电磁铁的磁性变强
C.电磁铁上端为S极 D.悬挂磁铁的弹簧变长
6.(2025·贵州) 如图所示,为判断一根铁棒是否有磁性,用铁棒靠近置于水平桌面上的小磁针进行检验,当出现以下哪一现象,便能证明铁棒有磁性( )
A.将铁棒一端靠近小磁针N极,N极被排斥
B.将铁棒一端靠近小磁针N极,N极被吸引
C.将铁棒两端分别靠近小磁针N极,N极均被吸引
D.将铁棒同一端分别靠近小磁针N、S极,两极均被吸引
7.(2025·眉山) 如图所示实验。说法正确的是( )
A.甲图说明通电导体周围存在磁场
B.乙图说明电磁铁磁性强弱与电流大小有关
C.丙图说明通电导体在磁场中要受到力的作用
D.丁图说明导体在磁场中运动能产生感应电流
8.(2025·遂宁) 下面是小明同学在笔记本上记录的物理应用及其对应原理,你认为有误的是( )
A.飞机的升力——流动的气体在流速大的地方压强小,流速小的地方压强大
B.三峡大坝“上窄下宽”——水的压强随深度的增加而增大
C.发电机——电磁感应现象
D.验电器——同种电荷相互吸引
9.(2025·绥化) 电动自行车的主要动力装置是电动机。下列选项中与电动机工作原理相同的是( )
A. B.
C. D.
10.(2025·山东) 小明在户外实践中,利用随身所带物品制作了简易指南针。他首先利用电池、带绝缘皮的导线、铁钉制成电磁铁,然后将缝衣针磁化并用细线水平悬挂,最后将两者靠近,静止时位置关系如图所示。下列说法正确的是( )
A.铁钉的钉尖是S极
B.缝衣针的针尖是N极
C.地磁场N极在地理北极附近
D.移开电磁铁后,缝衣针静止时针尖所指方向为南
11.(2025·山东) 在青岛港的全自动智能化码头,自动导引车经过布置在地上的磁钉时,会产生感应电流,进而实现精准定位。以下实验能揭示此原理的是( )
A. B.
C. D.
12.(2025·陕西)如图所示,是我国首艘海洋级智能科考船“同济”号,它采用了先进的混合动力系统,该系统能在轮船制动时将动能回收转化为电能储存起来。下列四幅图能反映“同济”号动能回收原理的是
A. B.
C. D.
13.(2025·陕西)用电烤箱烤面包时,烤箱上的电热管会发红发烫,下列用电器的工作原理与电烤箱烤面包时的工作原理相同的是
A.电蒸锅 B.洗衣机 C.电风扇 D.电冰箱
14.(2025·湖北)如图为一种防灾应急手摇电筒。中部固定有线圈,沿着筒身方向摇动电筒,使其内部的小物块来回穿过线圈,灯泡发光。小物块可能是
A.木块 B.石块 C.铜块 D.磁铁块
15.(2025·河南)地球是一个大磁体,我们就处在地球产生的磁场中。下列物体利用地磁场工作的是
A.指南针 B.温度计 C.连通器 D.电磁继电器
16.(2025·山西)小亮把旧电风扇中的电动机拆下来,将它与小灯泡连接成如图所示的闭合电路,在电机转轴一端插入细铁棒,快速转动铁棒,灯泡开始发光。下列说法正确的是
A.灯泡发光,说明该装置中一定有干电池
B.转动铁棒,电机线圈做切割磁感线运动
C.转动铁棒,电机就将电能转化为机械能
D.若铁棒反向转动,电路中不能产生电流
17.(2025·新疆) 下列设备或用电器中,利用了电动机工作的是( )
A.发电机 B.洗衣机 C.电视机 D.汽油机
18.(2025·河北)如图所示,下列操作或物理知识与结果对应正确的是
A.甲:电磁感应→扬声器发声
B.乙:闭合开关→电铃发声
C.丙:同名磁极相斥→小车相互靠近
D.丁:导线触接电池负极→小磁针静止不动
19.(2025·湖南) 动圈式话筒可将声信号转换成电信号。下列四幅实验装置图能反映其工作原理的是( )
A. B.
C. D.
20.(2025·乐山) 发电机组是水电站的核心部分,以下四个装置中符合发电机工作原理的是( )
A. B.
C. D.
21.(2025·泸州)如图所示为学校地理教研组新到的一个磁悬浮地球仪。底座隔空托起地球仪与下列哪个实验原理相同
A.
B.
C.
D.
二、填空题
22.(2025·深圳)全磁悬浮“人工心脏”已研发成功,其核心部件是个带有叶轮的泵,通电后叶轮可高速旋转,带动血液流动。图乙是叶轮悬浮原理简化图,元元同学思考后发现:螺线管通电后,周围存在 ,叶轮受斥力悬浮,叶轮下端的磁极是 极。
23.(2025·宜宾) 明朝郑和下西洋时,航行中使用罗盘和星象来辨别方向,其中罗盘小磁针的北极指向地磁场的 极,地磁场的北极在地理的 极附近。
24.(2025·广西) 如图所示,悬挂在蹄形磁体两极间的导体与灵敏电流计构成闭合回路。当导体静止不动时,电流计指针 ;当导体向右运动时,电流计指针 (选填“偏转”或“不偏转”)。
25.(2025·天津市)工业生产中常用“吸”的方式来搬运物体。吸盘安装在吊车上,抽出空气后的吸盘“吸”起大块玻璃板,这是利用 的作用;电磁铁安装在吊车上,通电后“吸”起大量钢铁,这是利用电流的 效应。
26.(2025·陕西)如图-1,是室内自动换气系统的电路图。控制电路的电源电压为3V,R0为电阻箱,RK的阻值与烟雾浓度K的关系如图-2所示。当电磁铁线圈中的电流I≥0.03A时,衔铁被吸下,电风扇转动,开始排气。
(1)电磁铁工作时,利用了通电导体周围存在 ,其上端为 极。
(2)当烟雾浓度升高时,控制电路中线圈的电流 (选填“变大”“变小”或“不变”)。
(3)控制电路的电源电压低于3V时,若保持空气质量的标准不变,R0的阻值应 (选填“增大”“减小”或“不变”)。
27.(2025·湖北)欧姆当年研究电流跟电阻和电压关系时,电流大小还不能准确测量。他巧妙设计了如图所示的装置来测量电流,用一根细丝悬挂磁针,平行放置在导线上方,当电路中有电流时,导线周围产生 ,因为力能改变物体的 ,所以磁针发生偏转,偏转角度就能反映电流大小。
28.(2025·福建) 将回形针掰直,磁化后放在树叶上,漂浮于水面,如下图,回形针在地球 的作用下,静止后指向南北。参照冬季午间小草的影子偏向北方,进一步推测A端是回形针磁体的 极。
29.(2025·苏州)如图是控制车辆进出的电动闸门设计图。抬杆AB质量分布均匀,长度为3m,重为 20N,最右端B点处悬挂一重为25N 的铁柱,B点到支点O的距离为0.6m。开关S闭合后,调节滑动变阻器使抬杆AB处于水平静止状态。(忽略支点O处的摩擦)
(1)电磁铁上端为 (N/S)极;
(2)此时电磁铁对铁柱的吸引力为 N;
(3)要使抬杆A端从图示位置向上抬起,滑动变阻器的滑片P应向 端移动
30.(2025·苏州)以下是《电磁转换》的相关知识结构图,请你补充完整。
① ,② 。
31.(2025·扬州)某款人形机器人参加半程马拉松比赛,安装在腹部的摄像头相当于一个 .透镜,远处的物体成倒立、 的实像.该机器人跑步由电动机驱动,电动机的工作原理是磁场对 有力的作用.以并肩运动的陪跑员为参照物,机器人是 的.机器人跑完21km路程用时约为2 h40 min,平均速度约为 km/h.(计算结果保留整数)
三、作图题
32.(2025·威海) 闭合开关,小磁针静止时状态如图所示,请在括号内标出通电螺线管的极性,并在A点标出电流方向。
33.(2025·吉林) 如图所示,请标出通电螺线管的N极并在A点画出磁感线的方向。
34.(2025·广西)
(1)请在图中画出竖直悬挂着的粽子所受重力的示意图。
(2)我们应该警惕“光污染”。请在图中画出太阳光线A、B照射到玻璃幕墙后的反射光线。
(3)如图,某同学正确运用右手螺旋定则(安培定则)判断通电螺线管的磁极,请在图中标出流入螺线管的电流方向和通电螺线管的极。
35.(2025·遂宁) 按要求作图
(1)如图(a),拉行李箱时,可将行李箱视为杠杆,图(b)是其简化图,O为支点,A为行李箱的重心。请在图(b)中画出重力的示意图以及拉力F的力臂L。
(2)小聪将通电螺线管放入地球仪来模拟地磁场,请在右侧简图中,用箭头在A点标出该处磁感线方向,并在括号内用“+”或“-”标出电源下端的极性。
36.(2025·陕西)
(1)如图-1甲是中国古代科技著作(天工开物)中,利用杆秤测量弓最大弹力的方法——试弓定力,请在图-1乙中画出细绳对弓弦的拉力F的示意图。
(2)如图-2,请在虚线框中标出电源右侧的正负极和小磁针左侧的N、S极。
37.(2025·新疆)
(1)请根据图甲中的入射光线画出其通过凸透镜后的折射光线。
(2)请在图乙中画出空中飞行篮球所受重力的示意图。
(3)请根据图丙中静止的小磁针的指向,标出通电螺线管的电源的“+”极和“-”极。
38.(2025·扬州)按照题目要求作图.
(1)如图1,苹果静止在水平桌面上,作出苹果的受力示意图.
(2)如图2,根据小磁针静止时N极的指向,标出A 处的磁感线方向和电源正、负极.
(3)如图3,卫生间吸顶灯从A 点发出的一束光射向平面镜上的O点,画出入射光线和反射光线.
四、实验探究题
39.(2025·广东)
(1)如题图,玻璃砖的长度为 cm:体温计的读数为 ℃
(2)在测量石块的密度实验中,天平平衡时,右盘中的砝码和标尺上游码的位置如题图甲,则石块的质量为 g:如图乙,石块的体积为 cm3.经计算,石块的密度为 g/cm3.
(3)如题图,小磁针静止时N极指向右,则螺线管的右端为 极,将小磁针沿着图中轨迹缓慢移到Q处,下列符合小磁针a端旋转情况的是 。
A. B. C. D.
40.(2025·北京市)
某同学用如图所示的装置进行实验,使金属棒ab向左做切割磁感线运动,灵敏电流计指针向右偏转,说明回路中有电流产生,这是 现象。灵敏电流计指针偏转的方向可以反映电路中的电流方向,若要改变上述灵敏电流计指针偏转的方向,可进行的操作是 。
41.(2025·德阳) 电与磁之间存在着相互联系,彰显物理现象的对称之美。
(1)如图甲所示,导线通电后小磁针发生偏转,断电后小磁针复位。实验表明通电导线周围存在 ;
(2)如图乙所示为水位自动报警器的原理图。当水位到达金属块A时, 灯亮,控制电路中电磁铁的上端为 极(选填“S”或“N”);
(3)如图丙所示,电路中的开关为单刀双掷开关。
①将开关掷于1,观察到导体棒运动,说明 (选填字母);
A.电路中产生了感应电流 B.通电导体在磁场中受力的作用
②将开关掷于2,使导体棒向右运动,观察到灵敏电流计指针向左偏转;若要使灵敏电流计的指针向右偏转,可以 (选填字母)。
A.保持磁体不动,使导体棒向左运动
B.将磁体的磁极对调,使导体棒向左运动
42.(2025·福建) 降水量是指一段时间内,雨水(或融化后的固体降水)未经蒸发、渗透和流失所积聚起来的水层深度。为了监测降水量,科创小组制作了“翻斗式雨量计”,装置外观是上端开口的圆柱体,如图1甲。内部结构示意图如图1乙。装置核心部件如图1丙,它是用中间隔板分开的两个完全对称的三角形容器,可绕O点处的水平轴转动,从而使两侧容器轮流接水,当一侧容器接满10mL雨水时会发生翻转,将水倒出,随着降雨持续,翻斗左右翻转,过程如图1丁。磁铁与配重通过连杆安装在翻斗上并随翻斗左右摆动,当磁铁经过磁感应开关(两者相互作用力忽略不计)时,磁感应开关通过电流传感器将翻斗翻转信息变成电信号,从而推算降水量。
(1)翻斗在水平位置时是等臂杠杆,实验器材中属于等臂杠杆的有 。
(2)连杆上装有可调高度的配重。校准过程,若倒入的水量总是大于10mL时翻斗才发生翻转,可通过 (填“降低”或“升高”)配重在连杆上的位置进行调整。
(3)图2甲是翻斗翻转信息变为电信号的工作电路,电源电压不变,、为定值电阻,。某次降雨,电流传感器(电阻不计)测得电流随时间变化关系如图2乙。
①当磁铁每次经过磁感应开关时,开关状态是 。
②“翻斗式雨量计”顶端开口面积为0.1m2,由图2乙可知该地区30min内降水量约为 mm,降水量变化趋势是 。(测量前翻斗内无水)
③由图2可知, 。
(4)若该装置在我国北方地区使用,可改进的措施是 。
43.(2025·苏州)某科技小组要设计冬季植物大棚控温系统。
【任务与要求】当环境温度t≤20℃,加热设备开启工作:温度t≥30℃,停止工作,大棚内温度维持在一定范围。
【设计与实施]①器材有:电压为6V 的电源、定值电阻、可控加热设备、热敏电阻(阻值温度变化的关系如图甲)等。②设计的电路如图乙,加热设备是否工作由其两端的电压UAB来控制,当UAB≥4V时,加热设备开启工作,当UAB≤UB时,加热设备不工作。(不考加热设备对电路的影响)
【分析与思考】
(1)电路中的 (R1/R2)是热敏电阻;
(2)定值电阻的阻值为 Ω
(3)U0= V
(4)长时间使用后,电源电压降低,系统控制的最高温度将 。
五、科普阅读题
44.(2025·深圳)深圳大力推动无人机事业发展,已经将无人机用于运送急救AED装置
苏华同学发现无人机搭配北斗卫星导航,有四个旋翼,每个旋翼搭配独立的电动机驱动,相邻旋翼之间旋转方向相反;无人机空载总质量(含电池,不含AED)为9kg,电池能量密度为200W·h/kg,(质量能量密度是指满电时电池能量与电池质量之比),
俊宇同学购买了一个无人机,无人机满电开始测试;飞行分为前往过程和返回过程,前往和返回过程都分为竖直上升过程,水平匀速运动过程,竖直下降过程,且消耗能量相同;无人机前往过程中竖直上升和竖直下降过程消耗的总能量为3.2×109 J,水平匀速移动过程飞行每秒消耗的能量为2500J,总用时160s,无人机用于驱动飞行的电能转化效率为60%,无人机竖直下降后电池剩于总容量的50%,测试结束。
(1)璐璐同学指出:无人机的信号传输是通过 传递;
(2)粤鹏同学说ADE 电击时为什么不能碰人,因为人体 ;
(3)当俊宇购买的无人机空载时匀速向下降落2m,重力做功 J;
(4)无人机螺旋桨飞行时向下,无人机向上飞,善于思考的苏华同学发现通过桨叶旋转空气提供升力,这体现了力的作用是 ;
(5)顺顺同学经过观察,指出无人机各电动机之间是 联的;
(6)满电时,无人机的电池质量占空载质量的百分比 (保留一位小数);
(7)为了更快运送急救 AED装置,请你帮助璐璐同学对无人机设计提出一条建议 ;如何去更改螺旋桨的旋转方向
45.(2025·广东)巡检机器人可对高压输电线进行巡检,如题图,其相关参数见题表,机器人的电机可切换为电动机或发电机,水平匀速巡检时,蓄电池减少的储能全部用于电机产生的牵引力做
功.当蓄电池储能降至0.1E时,停止电能输出,巡检终止.下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,将能量储存起来.
质量m0 54kg
最大巡检速度v0 4km.h-1
营电池满电时储能E0 0.2kW·h
电动机最大输出功率P0 100W
(1)下坡时,发电机利用 原理发电
(2)请完成以下能量转化流程图 :
(3)若充满电的机器人保持P0、v0水平巡检1.2h,则巡检路程为 km,牵引力为 N,蓄电池储能剩余 kW·h.
(4)如题图巡检线路,当机器人到达A点时,蓄电池储能为0.95E0随后机器人先下坡巡检(电机切换为发电机),后水平巡检(电机切换为电动机),巡检全程速度大小保持不变.AB段重力势能减少量为1×105J.充电过程中,重力势能每减少1J,转化为电能并储存在蓄电池中的能量为0.45J.水平阶段机器人所受阻力大小是重力的0.15倍,则水平阶段匀速巡检的最大路程为 m.(g=10N/kg)
46.(2025·齐齐哈尔) 阅读短文,回答问题。
居家用气,安“燃”无恙
炒菜、做饭、取暖……燃气为我们生活带来了极大的便利。但在燃气使用过程中如发生泄漏或燃气具使用不规范的情况,会导致燃气事故的发生。为确保居家用气安“燃”无恙,燃气管理部门要求用户要安装家用燃气报警器。
图甲是某种燃气报警器部分电路示意图,控制电路中的为气敏电阻,的阻值与燃气浓度的关系如图乙所示。电源电压稳定,闭合开关和,报警器处于工作状态。当燃气浓度达到预设值时,电磁铁恰好能将衔铁吸下,工作电路中灯熄灭,灯发光、电铃响而报警(电磁铁线圈的阻值忽略不计)。
(1)燃气报警器的安装位置应根据被检测气体的密度确定,若家中使用天然气(主要成分是密度比空气密度小的甲烷),则燃气报警器应安装在燃气灶附近的 (选填“上”或“下”)方区域。
(2)图甲中,闭合控制电路的开关,电磁铁上端是 (选填“”或“”)极。当燃气浓度未达到预设值时,杆处于静止状态。若弹簧对端的拉力为动力,观察图甲可知,此时杆AOB是 (选填“省力”“等臂”或“费力”)杠杆。
(3)下列四幅图所示的原理与控制电路中电磁铁的工作原理相同的是( )
A.验电器工作原理
B.电流的磁效应
C.电磁感应现象
D.交流发电机原理
(4)若想将燃气报警器的预设值调低,在保证电路元件安全的前提下,可以采取的合理方法是 。(写出一种即可)
六、综合题
47.(2025·河南)随着科技的发展,机器人的应用日益广泛。人形机器人是一种模仿人类外观和行为的机器人,某兴趣小组以此为主题开展了研究。
(1)技术人员与人形机器人之间可通过无线网络传递信息,这是利用 (填“电磁波”或“超声波”)来实现的。机器人可通过安装在身上的电动机完成许多动作,电动机的工作原理是 。
(2)某跑步机器人在一次长跑性能测试中,跑完18km的路程用时2.5h,该机器人跑步的平均速度是多少?
(3)某工业机器人质量为70kg,搬着货物静止在水平地面上,脚与地面的总接触面积为0.05m2,此时对地面的压强为1.8x104Pa,该机器人所搬货物的质量是多少?(g取10N/kg)
答案解析部分
1.A
当车辆经过颠簸路面时,减震系统的上下运动带动电机内导体切割磁感线发电 ,原理为电磁感应;
A、闭合线圈做切割磁感线运动,产生感应电流,属于电磁感应,故A正确;
B、图为奥斯特实验,原理为电流的磁效应,故B错误;
CD、图中有电源,通电导线在磁场中收到力的作用而运动,故CD错误;
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机。
2.B
A.由图可知,电流从电磁铁的左端流入,右端流出,根据安培定则可知,电磁铁的右端为N极,左端为S极,故A错误;
BCD.当滑片P向左滑动时,滑动变阻器接入电路的电阻变小,根据欧姆定律可知,左侧控制电路中的电流变大,电磁铁的磁性增强,因巨磁电阻的阻值随周围磁场强度的增强而减小,所以此时巨磁电阻的阻值减小。在右侧工作电路中,电源电压不变,巨磁电阻阻值减小,根据欧姆定律可知,电路中的电流变大,根据P=I2R可知,指示灯的实际功率变大,指示灯会变亮,故B正确,CD错误;
故选B。
(1)根据安培定则,用右手握住螺线管,让四指指向螺线管中电流的方向,则大拇指所指的那端就是螺线管的N极;根据安培定则先判断出通电螺线管的极性;
(2)当滑片P向左滑动时,根据欧姆定律判定控制电路中电流的变化和电磁铁磁性强弱的变化,进而知道巨磁电阻的阻值的变化,根据欧姆定律判定工,作电路中通过灯泡电流的变化,根据P=I2R分析灯泡亮度的变化。
3.A
A.古代铜镜成像,属于平面镜成像,利用了光的反射原理,故A正确;
B.日晷测量时间利用了光沿直线传播的原理,故B错误;
C.用大小相同的力敲击不同的编钟时,产生的响度相同,音调不同,故C错误;
D.司南能够指南北是由于受到了地磁场的作用,而我国的北斗卫星导航系统是利用电磁波传递信息的,故D错误。
故选A。
(1)光线传播到两种介质的表面上时会发生光的反射现象,例如水面上出现岸上物体的倒影、平面镜成像、玻璃等光滑物体反光都是光的反射形成的;
(2)光在同种、均匀、透明介质中沿直线传播,产生的现象有小孔成像、影子的形成、日食和月食等;
(3)响度是指声音的大小,跟距声源的远近和振幅有关;
(4)地球的周围存在磁场。
4.B
通电导体在磁场中受到力的作用,受力方向与两个因素有关:一个是磁场方向,另一个是电流方向。所以若要使ab向左运动,可以改变电流的方向或改变磁场的方向,故B正确,ACD错误。
故选B。
通电导体在磁场中受到力的作用,受力方向与两个因素有关:一个是磁场方向,另一个是电流方向。如果只改变一个因素,则导体受力方向改变,如果同时改变两个因素,则导体受力方向不变。
5.D
由图可知,电路时串联的,电流从电磁铁的下方流入,上方流出,根据安培定则可知,电磁铁的上方为N极,而磁铁的下方也为N极,根据磁极间的相互作用可知,电磁铁与磁铁会相互排斥;向右缓慢移动滑动变阻器滑片,滑动变阻器接入电路的阻值变大,根据欧姆定律可知,电路中的电流会变小,电磁铁的磁性会减弱,电磁铁与磁铁间的排斥力会减小,悬挂磁铁的弹簧长度会变长,故ABC错误,D正确。
故选D。
1.分析电路中电流流向,根据安培定则判断电磁铁的极性,根据磁极间的相互作用判断电磁铁与磁铁之间的作用;
2. 向右移动滑片,滑动变阻器的最值变大,根据欧姆定律分析电路中电流的变化,根据电流变化分析电磁铁的磁性强弱变化,以此分析弹簧的长度变化;
3.电磁铁的磁性强弱与电流大小和线圈匝数有关,线圈匝数一定时,电流越大,电磁铁磁性越强;电流大小一定时,电磁铁的线圈匝数越多,磁性越强。
6.A
A.根据同名磁极相互排斥可知,将铁棒一端靠近小磁针N极,N极被排斥,说明铁棒的一端为N极,可以证明铁棒由磁性,故A正确;
B.根据“磁体能够吸引铁、钴、镍等物质”可知,将铁棒一端靠近小磁针N极,N极被吸引,不能证明铁棒有磁性,故B错误;
CD.根据“同名磁极相互排斥,异名磁极相互吸引”可知,若铁棒有磁性,则小磁针的一端应与铁棒的一端吸引,另一端排斥,同理铁棒的一端应与小磁针的一端吸引,另一端排斥, 故CD错误。
故选A。
1.磁体能够吸引铁、钴、镍等物质;
2.同名磁极相互排斥,异名磁极相互吸引。
7.A
A、通电导线周围存在磁场使得小磁针发生偏转,故A正确;
B、乙图中变量为匝数,说明 电磁铁磁性强弱与匝数多少有关,故B错误;
C、图中没有电源,表明闭合线圈做切割磁感线运动会产生感应电流,故C错误;
D、图中有电源, 说 明通电导体在磁场中要受到力的作用 ,D错误;
综上选A。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
8.D
A.飞机的升力是由于机翼上下表面气流速度不同,导致上方空气流速大、压强小,下方空气流速小、压强大,从而产生向上的压力差,即升力,故A正确不合题意;
B.三峡大坝设计成上窄下宽,是因为水的压强随深度增加而增大,大坝底部需要承受更大的水压,所以要更宽以保证结构稳定,故B正确不合题意;
C.发电机是利用电磁感应原理,将其他形式的能源转化为电能,闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中就会产生感应电流,故C正确不合题意;
D.验电器的工作原理是同种电荷相互排斥,故D错误符合题意。
故选D。
A.流体流速越大的位置,压强越小;
B.根据液体压强的特点判断;
C.根据发电机的工作原理判断;
D.根据验电器的工作原理判断。
9.D
A.电铃是利用电流的磁效应来工作的,故A不符合题意;
B.该装置是发电机的原理图,是利用电磁感应现象来工作的,故B不符合题意;
C.奥斯特实验说明通电导体的周围存在磁场,故C不符合题意;
D.该装置是电动机的原理图,故D符合题意。
故选D。
电动机是利用通电导体在磁场中受力运动的原理制成的。
10.D
A.由图可知,电流由线圈的右侧流入,左侧流出,由安培定则可知,铁钉的钉尖是N极,故A错误;
B.铁钉的钉尖是N极,由异名磁极相互吸引可知,缝衣针的针尖是S极,故B错误;
C.地球是一个大磁体,地磁南极(S)在地理北极附近,地磁北极(N)在地理南极附近,故C错误;
D.缝衣针的针尖是S极,移开电磁铁后,受地磁场的作用,缝衣针静止时针尖所指方向为南,故D正确。
故选D。
A.根据安培定则判断出铁钉的磁极;
B.同名磁极相互排斥,异名磁极相互吸引;
C.地球是一个大磁体,地磁南极在地理北极附近,地磁北极在地理南极附近,由于受到地磁场的作用,放入地磁场的磁体都受到地磁场的作用;
D.地磁场的作用,指南针的N极指北,S极指南。
11.D
由题意可知,自动导引车经过布置在地上的磁钉时,会产生感应电流,其工作原理为电磁感应现象。
A.该图是奥斯特实验,其原理是电流的磁效应,故A不符合题意;
B.该图是探究通电导体在磁场中受力运动的实验,故B不符合题意;
C.图中有电源,是电动机原理图,电动机是利用通电导体在磁场中受力的作用而运动制成的,故C不符合题意;
D.图中没有电源,是发电机原理图,是利用线圈在磁场中做切割磁感线运动,产生感应电流制成的(即电磁感应现象),故D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动时,会产生电流,这种电流叫感应电流,这一现象叫电磁感应现象。
12.D
D、轮船制动时 ,闭合线圈做切割磁感线运动,机械能转换为电能,原理为电磁感应,D正确;
A、属于电流的磁效应,故A错误;
B、有电源,属于通电导体在磁场中受到力的作用,故B错误;
C、司南受到地磁场的作用,勺把指向地理的南方,故C错误。
综上选D。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
13.A
电烤箱的工作原理为电流的热效应,和电蒸锅的工作原理相同,洗衣机、电风扇、电冰箱工作室都有电动机,工作原理为通电导线在磁场中受到力的作用,故A正确,BCD错误。
综上选A。
1、电流的热效应:原理为焦耳定律Q=I2Rt,所以产热量和电阻成正比,和电流的平方成正比;
2、通电导线在磁场中受到力的作用,实例有:电动机。
14.D
由题意可知,该手电筒有线圈,使用时将它来回摇晃,线圈在磁场中就做切割磁感线运动,此时线圈中有感应电流产生,所以此手电筒发电的原理是电磁感应现象,来回运动的物体是导体,应该是磁铁块,故ABC不符合题意、D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动,导体中产生感应电流。
15.A
A.指南针具有磁性,在地磁场中会发生偏转,指示南北,故A正确;
B.温度计是利用液体的热胀冷缩原理来测量温度,与地磁场无关,故B错误;
C.连通器与液体压强的特点有关,与地磁场无关,故C错误;
D.电磁继电器是利用电流的磁效应,与地磁场无关,故D错误。
故选A。
根据各个选项中仪器的工作原理分析判断。
16.B
A、灯泡发光说明电路有电流, 转动铁棒,电机的线圈做切割磁感线运动,产生感应电流,A错误,B正确。
C、转动铁棒,机械能转换为电能,C错误;
D、铁棒反向转动,仍然做切割磁感线运动,产生感应电流,灯泡发光,故C错误。
综上选D。
1、电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
2、利用电磁感应制作的机械有:发电机,能量转化为机械能转化为电能。
17.B
A、发电机利用的是电磁感应原理,故A错误;
B、洗衣机转动时,利用电动机进行工作,故B正确;
C、电视机工作时将电能转化为光能和声能,和电动机的工作原理不同,故C错误;
D、汽油机利用的热机,故D错误。
综上选B。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、汽油机是利用热机进行工作的;
3、通电导线在磁场中受到力的作用,实例有:电动机。
18.B
A、扬声器发声的工作原理为通电导线在磁场中受力,故A错误;
B、闭合开关,通电螺线管产生磁性,吸引衔铁使得敲击铃碗,故B正确。
C、 同名磁极相斥 ,使得小车相互排斥,远离,故C错误;
D、通电导线周围存在磁场,使得小磁针偏转,故D错误。
综上选B。
1、电磁感应现象:闭合电路的一部分导体在磁场中作切割磁感线运动,导体中就会产生电流的现象,实例:发电机、 POS机读出信息;
2、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转;
3、通电导线在磁场中受到力的作用,实例有:电动机;
4、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
19.D
动圈式话筒把声信号转变为电信号,其工作原理是电磁感应现象。
A.图中反映的是磁极间的相互作用规律:同名磁极互相排斥,异名磁极互相吸引,故A不符合题意;
B.电路接通后,小磁针发生偏转,说明通电导体周围存在磁场,故B不符合题意;
C.电流相同时,电磁铁的线圈匝数越多,磁性越强,吸引大头针的数量越多,故C不符合题意;
D.闭合开关,当导体ab在磁场中切割磁感线时,电流表指针摆动,说明有感应电流产生,这是电磁感应现象,故D符合题意。
故选D。
闭合电路的一部分导体在磁场中做切割磁感线运动时,电路中会产生感应电流,这种现象叫做电磁感应。
20.D
A.如图是司南,利用的是同名磁极相互排斥,异名磁极相互吸引,故A错误;
B.如图是电磁铁的利用,电磁铁通电后具有磁性,利用的是电流的磁效应的原理,故B错误;
C.如图是通电导体在磁场中受到力的作用,是电动机的工作原理,故C错误;
D.如图的是闭合电路的线圈在磁场中做切割磁感线运动时,线圈中就会产生电流,是电磁感应现象,属于发电机的工作原理,故D正确。
故选D。
发电机的工作原理是电磁感应,即闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中就会产生感应电流。
21.C
磁悬浮地球仪利用了同名磁极相互排斥的原理。
A.图中实验探究了通电导体在磁场中受到力的作用,故A不合题意;
B.图中实验探究了电磁感应现象,故B不合题意;
C.图中实验的原理是同名磁极相互排斥,故C符合题意;
D.图中实验的原理是通电导体周围存在磁场,故D不合题意。
故选C。
磁悬浮地球仪利用了同名磁极相互排斥的原理,据此可逐一分析判断。
22.磁场;N
根据奥斯特发现的电流的磁效应可知,螺线管周围存在磁场,根据安培定则可知,通电螺线管上端为N,所以 叶轮下端的磁极是 N极。
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关;
磁极相互作用:同名磁极相互排斥、异名磁极相互吸引。
23.南;南
根据同名磁极相互排斥,异名磁极相互吸引可知,罗盘小磁针的北极指向地磁场的南极;
地磁南北极与地理南北极是相反的,所以地磁场的北极在地理的南极附近。
1.磁极间的相互作用:同名磁极相互排斥,异名磁极相互吸引;
2.地磁南北极与地理南北极是相反的。
24.不偏转;偏转
导体静止不动时 ,不做切割磁感线运动,没有感应电流产生,电流计指针不转动,导体向右运动,做切割磁感线运动,产生感应电流,所以电流计指针偏转。
电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
25.大气压;磁
(1) 吸盘安装在吊车上,抽出空气后,吸盘内部气压小于外界大气压,外界大气压就会将吸盘紧紧压在玻璃板上,从而“吸”起大块玻璃板,这是利用了大气压的作用。
(2)电磁铁通电后具有磁性,能够吸引钢铁等磁性物质,而电磁铁是利用电流的磁效应工作的,即通电导体周围存在磁场,所以这里是利用电流的磁效应。
(1)抽出空气后,吸盘内外气压不同,据此分析;
(2)通电导线周围存在磁场,电磁铁是利用电流的磁效应工作的。
26.(1)磁场;S
(2)变大
(3)减小
(1)电磁铁的工作原理为通电导体周围存在磁场,根据安培定则可知,电磁铁上端为S极,下端为N极。
(2)据图2可知,随着K的增加,气敏电阻的阻值会减小,电源电压不变,根据欧姆定律U=IR可知,电路的电流变大。
(3)电源电压减小时,需要气敏电阻更小才能达到报警时的电流,题目要求空气质量不变,所以气敏电阻的阻值不变,只能降低定值电阻的阻值。
1、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
2、串联电路的电路规律:串联电路,电流处处相等,电源的电压为用电器电压之和,总电阻为用电器电阻之和。
3、电压表与待测用电器并联测量电压,电流表串联测量用电器电流,根据欧姆定律U=IR计算用电器的电流和电阻以及电压。
27.磁场;运动状态
(1)当电路中有电流时,根据电流的磁效应可知,导线周围产生磁场;
(2)磁针在磁场中会受到力的作用,而力可改变物体的运动状态,所以磁针发生偏转,偏转角度就能反映电流大小。
(1)通电导体周围存在磁场;
(2)磁场对放入其中的磁体有力的作用,力可以改变物体的运动状态。
28.磁场;S
地球是一个巨大的磁体,磁化后的回形针具有磁性,将其放在树叶上,漂浮于水面,则回形针在地球磁场的作用下,静止后会指南北两个方向。小草的影子偏向北方,根据影子的形成原理可知太阳南方,地理南方附近是地磁北极,根据磁极间的相互作用规律可知回形针磁体指南方的是S极,即推测A端是回形针磁体的S极。
地球是一个大磁体,地球周围存在的磁场叫地磁场。 当磁体自由转动并静止下来时,指南的一端为南极,指北的一端为北极,据此分析解答。
29.(1)S
(2)5
(3)上
(1)由图可知,电流由螺线管的下端流入,由安培定则可知,电磁铁的下端为N极,上端为S极;
(2)由图可知,抬杆AB实质是一个杠杆,AB的重心到支点O的距离为:L阻=AB-OB=×3m-0.6m=0.9m,L动=OB=0.6m,
B端受到的拉力大小等于铁柱的重力大小与电磁铁对铁柱的吸引力大小之和,根据杠杆的平衡条件可得:
G杆L阻=(G铁+F)L动,
则:20N×0.9m=(25N+F)×0.6m,
解得:F=5N;
(3)要使抬杆A端从图示位置向上抬起,应增加电磁铁对铁柱的吸引力,即增大电磁铁的磁性,因此应将滑动变阻器的滑片P应向上端移动,减小电路中的电阻,增大电路中的电流。
(1)根据安培定则判断电磁铁的磁极;
(2)由图可知,B端受到的拉力大小等于铁柱的重力大小与电磁铁对铁柱的吸引力大小之和,根据杠杆的平衡条件解答;
(3)电磁铁的磁性大小与电流的大小有关,通过的电流越大,电磁铁的磁性越强。
30.磁效应;发电机
奥斯特实验说明:通电导线周围存在磁场,即电流的磁效应;发电机的原理是电磁感应现象。
根据对奥斯特实验现象的理解解答。根据对电磁感应现象应用的知识解答。
31.凸;缩小;电流;静止;8
机器人身体上安装有摄像机,其镜头相当于一个凸透镜,远处的物体在镜头的二倍焦距外,根据凸透镜磁性规律,此时成倒立、缩小的实像;
机器人内的电动机带动机器人跑步,电动机消耗电能,工作原理是磁场对电流有力的作用;
以并肩运动的陪跑员为参照物,机器人相对于陪跑员没有位置变化,是静止的;
根据机器人的路程21km,用时约为,计算平均速度约为。故第1空填:凸;第2空填:缩小;第3空填:电流;第2空填:静止;第5空填:8。
摄像机的镜头是凸透镜,当物体在凸透镜的二倍焦距外,成倒立缩小的实像;电动机的工作原理是磁场对电流的作用;相对于参照物,没有位置变化,物体的静止的;根据,计算速度。
32.
小磁针的N极为磁场的方向,所以通电螺线管右端为N极,根据安培定则可知,电源左端为正极,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
33.
根据安培定则可知,左端为N极,磁感线方向为N极出发回到S极,所以A的磁感线方向水平向右,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关
磁感线: 在磁场中画一些曲线,使曲线上任何一点的切线方向都跟这一点的磁场方向相同,磁感线是人为假想表征磁场方向和强弱的 的物理量,磁感线从N极出发,回到S极。
34.(1)
(2)
(3)
(1)重力方向竖直向下,据此作图:
(2)平面镜反射遵循反射射角等于入射角,据图可知反射光线已知,过反射点做垂直平面镜的法线,据此做出反射光线。
(3)据图可知,大指拇指向即为N极,其余4指的方向为电流方向,据此作图:
通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
反射定律:反射角等于入射角,反射光线、入射光线、法线处于同一平面、在反射中光路是可逆的。
重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
35.(1)
(2)
(1)力的方向是竖直向下的,从物体重心A画一条带箭头的竖直向下的有向线段,用G表示,
支点在O处,反向延长力F的作用线,从支点O做F的垂线,该垂线段为动力F的力臂L,如图所示:
(2) 地球的地磁南极在地理北极附近,地磁北极在地理南极附近。要模拟地磁场,通电螺线管的上端应为S极,下端应为N极。在磁体外部,磁感线总是从N极出发回到S极,所以A点处磁感线方向是向上的。根据安培定则(右手螺旋定则),用右手握住螺线管,大拇指指向N极(下端),则四指弯曲的方向为电流的方向,可判断出电流从电源的上端流出,下端流入,所以电源下端的极性为“-”。作图如下:
(1)①根据重力的方向是竖直向下的,从物体重心做竖直向下的力即可。
②力臂的作法:从支点向力的作用线作垂线段,作出动力F1的力臂L。
(2) 地球的地磁南极在地理北极附近,地磁北极在地理南极附近,可判断出通电螺线管的磁极,再根据安培定则判断出电流的方向从而找到电源的正负极。
36.(1)
(2)
弓弦受到弓和物体的重力,方向竖直向下,受到绳子的拉力,竖直向上,据此作图:
(2)磁感线方向为磁针N极指向,右侧的方向向左,所以N极向左,根据安培定则分析电流流向,可知右侧为负极,据此作图:
1、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关;;
2、重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
37.(1)
(2)
(3)
(1)凸透镜对光线有会聚作用,平行主光轴的光线经过凸透镜会折射,折射光线经过焦点,据此作图:
(2)重力的方向竖直向下,据此作图:
(3)小磁针N极指向左,所以磁感线方向向左,右端为N极,根据安培定则可知左端为正极,据此作图:
1、重力:由于地球的吸引而使物体受到的力,大小为自身重力、方向竖直向下,作用点位于物体重心。
2、通电螺线管:由通电线圈组成,磁性方向可通过安培定则判断:用右手握住通电螺线管,让四指指向电流的方向,那么大拇指所指的那一端就是通电螺线管的N极,磁性与电流、线圈匝数有关。
3、透镜成像规律:凸透镜对光线有汇聚作用,平行光入射凸透镜会聚焦在焦点,经过光心的光线不发生偏折。
38.(1)
(2)
(3)
(1)图1中,苹果在水平桌面静止,受到平衡力,苹果受到竖直向下的重力,受到竖直向上的支持力,作用点在重心,两个力在同一直线上,分别画出竖直向下的重力G,竖直向上的支持力F,如图 ;
(2)图2中,小磁针的N极在左侧,则右侧是S极,根据磁极间相互作用,通电螺线管的左侧是N极,磁体的外部,磁场方向从N极指向S极,A点磁场方向指向右;根据安培定则,右手大拇指在通电螺线管的左侧,四指方向为电流方向,则电源的右侧是正极,左侧是负极,如图 ;
(3)图3中,光线从A点射向O点,连接AO为入射光线,过O作平面镜的垂线为法线,反射光线和入射光线在法线两侧,反射角等于入射角,画出反射光线,如图。
(1)静止的苹果受到竖直向下的重力,竖直向上的支持力,二力平衡时,力的大小相等;
(2)根据磁极间相互作用,判断通电螺线管的磁极位置,磁体外部的磁场方向从N极指向S极;根据安培定则判断通电螺线管的电流方向;
(3)光在反射时,反射角等于入射角。
39.(1)4.65;36.4
(2)26.2;10;2.62
(3)N;D
(1)刻度尺的分度值为1mm,左端与0刻度对齐,玻璃砖的长度为4.65cm;
体温计的分度值为0.1℃,读数为36.4℃;
(2)游码标尺的分度值为0.2g,石块的质量为:
m=20g+5g+1.2g=26.2g;
(3)图丙中水和石块的总体积为30cm3,水的体积为20cm3,石块的体积为:
V=30cm3-20cm3=10cm3,
石块的密度为:
。
(4)小磁针静止时N极指向右,左端是S极,与螺线管的右端相对,根据异名磁极相互吸引可知,螺线管的右端为N极,左端为S极,将小磁针沿着图中轨迹缓慢移到Q处,a端始终与螺线管右端吸引,小磁针将逆时针转动,直到移到Q处,故ABC错误,D正确。
故选D。
故答案为:(1)4.65;36.4;(2)26.2;10;2.62;(3)N;D。
(1)根据刻度尺和体温计的分度值读数;
(2)物体的质量等于砝码的质量加游码在标尺上所对的刻度值;读出石块和水的总体积,用总体积减去水的体积计算出石块的体积,根据公式得出石块的密度;
(3)根据异名磁极相互吸引分析螺线管的南北极及小磁针旋转的方向。
40.电磁感应;将磁体的磁极对调或使金属棒ab向右做切割磁感线运动
由图可知,闭合电路中,金属棒ab向左做切割磁感线运动,灵敏电流计指针向右偏转,说明回路中有电流产生,这是电磁感应现象;
感应电流的方向与磁场方向和导体切割磁感线运动的方向有关,当磁场方向或导体切割磁感线运动的方向改变时,感应电流的方向发生改变;当磁场方向和导体切割磁感线运动的方向同时改变时,感应电流的方向不变,由此可知,要改变上述灵敏电流计指针偏转方向,即改变电流的方向,可进行的操作是:将磁体的N、S对调,仍使金属棒ab向左做切割磁感线运动(或保持磁体的N、S不变,使金属棒ab向右做切割磁感线运动)。
闭合电路的一部分导体在磁场中做切割磁感线运动时,电路中会产生电流,这种现象叫电磁感应现象;
感应电流的方向与磁场方向和导体切割磁感线运动的方向有关,当磁场方向或导体切割磁感线运动的方向改变时,感应电流的方向发生改变;当磁场方向和导体切割磁感线运动的方向同时改变时,感应电流的方向不变,由此可知要改变上述灵敏电流计指针偏转方向的操作。
41.(1)磁场
(2)红;S
(3)B;A
(1) 导线通电后小磁针发生偏转 ,断电后小磁针不偏转,所以通电导线周围存在磁场;
(2) 当水位到达金属块A时 ,水作为导体可以导电所以衔铁吸引下来,红灯亮,根据安培定则可知上端为S极。
(3) 将开关掷于1, 电路中存在电源,此时通电导线在磁场中受到力的作用而运动。B正确,A错误。
将开关掷于2, 此时导体做切割磁感线运动,产生感应电流,感应电流的方向和导体切割磁感线的方向、磁场的方向有关,所以要使得电流的方向发生偏转,可以单独变换磁场方向或者导体切割磁感线的方向,故A正确,B错误。
综上选A。
1、电磁感应定律的应用,闭合回路中的导体不断做切割磁感线的运动,导体中就会产生感应电流的现象就是电磁感应现象。
2、利用电磁感应制作的机械有:发电机,能量转化为机械能转化为电能。
3、电流的磁效应:通电导线周围存在磁场,使得小磁针发生偏转。
4、通电导线在磁场中受到力的作用,实例有:电动机。
42.(1)托盘天平
(2)降低
(3)闭合;1.2;减弱;200
(4)低温天气,增加加热装置;若降水量偏小,可以降低配重的高度并重新校准参数
(1)实验器材中属于等臂杠杆的有托盘天平、定滑轮等;
(2)倒入的水量总是大于10mL时翻斗才发生翻转,说明配重的力臂过大,可降低配重的位置减小力臂;
(3)①由图2乙可知,电流每隔一段时间后会变大,但时间较短;
电流变大且时间很短的原因是磁铁每次经过磁感应开关,使开关闭合,将R1短路,电路总电阻变小,电流变大,而经过的时间很短,故电流维持时间较短,
由此当磁铁每次经过磁感应开关时,开关状态是闭合;
②由图2乙可知,30min内有12次电流变化,即翻斗左右摆动了12次,每次倒水10mL,一共倒水120mL=120cm3=1.2×10-4m3;
顶端开口面积为0.1m2,则降水量为;
③由图2乙可知,电流变化的时间间隔变长,即翻斗每次倒水的时间间隔变长,说明降水量变小;
由图2可知,磁感应开关断开时,电流较小为5mA=5×10-3A,磁感应开关闭合时,电流较大为25mA=25×10-3A,
根据欧姆定律,有:U=5×10-3A×(800Ω+R2),U=25×10-3A×R2,U为电源电压,
解得:U=5V,R2=200Ω;
(4)若该装置在我国北方地区使用,北方地区气温较低且降水量较少,为防止降下的雨水结冰可增加加热装置,同时降水量少的情况下防止装置测量误差较大,
(1)实验器材中属于等臂杠杆的有托盘天平、定滑轮等;
(2)倒入的水量总是大于10mL时翻斗才发生翻转,说明配重的力臂过大,可降低配重的位置减小力臂;
(3)①由图2乙可知,电流每隔一段时间后会变大,但时间较短原因是磁铁每次经过磁感应开关,使开关闭合,将R1短路,电路总电阻变小,电流变大,而经过的时间很短,故电流维持时间较短;
②由图2乙可知,30min内有12次电流变化,即翻斗左右摆动了12次,每次倒水10mL,一共倒水120mL,用降水总体积除以开口面积得到降水量;
③由图2中,对5mA和25mA两个电流值的状态下,分别使用欧姆定律,联立两式可求出R2的阻值;
(4)若该装置在我国北方地区使用,北方地区气温较低且降水量较少,为防止降下的雨水结冰可增加加热装置,同时降水量少的情况下防止装置测量误差较大,可以通过降低配重的高度来调大装置的灵敏度。
43.(1)R1
(2)80
(3)3
(4)降低
(1)由图乙可知,R1与R2串联,加热设备并联在R1两端。由图甲可知,当温度降低时,热敏电阻的阻值变大,根据串联电路的分压关系可知,热敏电阻两端的电压变大,当温度降低到一定程度时,AB两端的电压增大到一定程度,此时加热设备要开启工作,故电路中的R1是热敏电阻;
(2)由图甲可知,当t=20℃时,热敏电阻的阻值:R1=160Ω,此时UAB=4V,
根据串联电路的电压规律可得,定值电阻两端的电压:U2=U-UAB=6V-4V=2V,
根据串联电路的分压关系可得,定值电阻的阻值:;
(3)由图甲可知,当t=30℃时,热敏电阻的阻值:R'1=80Ω=R2,
根据串联电路的电阻和欧姆定律可得,电路中的电流:,
此时AB两端的电压:U0=U'AB=IR'1=
A×80Ω=3V;
(4) 长时间使用后,电源电压降低,由于控制电压不变,根据串联电路的电压规律可知,定值电阻两端的电压变小,根据可知,在UAB和R2一定时,U2变小,系统控制的最高温度对应热敏电阻的阻值变小,由图甲可知,系统控制的最高温度升高。
(1)由图乙可知,R1与R2串联,加热设备并联在R1两端。由图甲可知,当温度降低时,热敏电阻的阻值变大,根据串联电路的分压关系可知,热敏电阻两端的电压变大,当温度降低到一定程度时,加热设备开启工作,由此判断电路中的热敏电阻;
(2)由图甲可知,当t=20℃时,热敏电阻的阻值大小,此时UAB=4V,根据串联电路的电压规律可得定值电阻两端的电压,根据串联电路的分压关系可得定值电阻的阻值大小;
(3)由图甲可知,当t=30℃时,热敏电阻的阻值大小,根据串联电路的电阻和欧姆定律求电路中的电流,进一步求得AB两端的电压。
(4) 长时间使用后,电源电压降低,由于控制电压不变,根据串联电路的电压规律可知,定值电阻两端的电压变小,根据串联电路的分压关系可知系统控制的最高温度对应热敏电阻的阻值变化,从而可知系统控制的最高温度变化。
44.(1)电磁波
(2)是导体,容易导电
(3)180
(4)相互的
(5)并
(6)22.2
(7)增大电动机的功率;改变通过电动机的电流方向
(1)远距离信息传播是通过电磁波进行传递的;
(2) 电击时为什么不能碰 人,是由于人为导体,容易导电;
(3) 无人机空载时 重力G=mg=9kg×10N/kg=90N,做功为W=Gh=90N×2m=180J;
(4) 无人机螺旋桨飞行时向下,无人机向上飞 ,是由于螺旋桨飞行时向下,给与空气向下的力,根据力作用的相互性,空气会为无人机提供向上的力;
(5) 每个旋翼搭配独立的电动机驱动,所以无人机电动机之间是并联的;
(6) 无人机前往过程中竖直上升和竖直下降过程消耗的总能量为3.2×109/J,水平匀速移动过程飞行每秒消耗的能量为2500J,总用时160s , 无人机用于驱动飞行的电能转化效率为60%, 所以消耗的能量, 无人机竖直下降后电池剩于总容量的50%, 所以电池的储电量为400W·h,电池能量密度为200W·h/kg ,所以电池的质量为2kg, 无人机的电池质量占空载质量的百分比
(7) 更快运送急救 AED装置 ,则需要在更短的时间做更多的功, 所以需要增加电动机的动力,螺旋桨的原理为通电导线在磁场中受到的力的作用,所以改变电流方向可以改变螺旋桨的旋转方向。
1、家庭安全用电原则:不同时使用功率较大的电器,避免电路中功率较大导致电流较大,引发火灾、不湿手接触用电器开关、不在电线上上晾衣服,金属外壳要接地,避免发生触电;
2、信息的传递:无线网络通信依靠电磁波来传递信息;
3、相互作用力:作用力是相互的,施力物体也是受力物体。特点为大小相等、方向相反、作用在两个物体上;
4、电路的串并联:串联:电路元件首位相连,用电器相互干扰,并联:电路元件首首相连,用电器互不干扰,开关在干路上控制整个电路的通断,开关在支路上控制单个支路的通断;家庭、公共场所的电路为并联电路;
5、功的计算:总功为W=Fs,总功包括两部分,有用功和额外功,其中有用功就本题目来说是克服重力做功即W有=Gh;
6、通电导线在磁场中受到力的作用,实例有:电动机。
45.(1)电磁感应
(2)化学
(3)4.8;90;0.08
(4)8000
(1)下坡时,发电机利用电磁感应原理发电;
(2)下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,蓄电池将电能转化为化学能储存起来;
(3)若充满电的机器人保持P0、v0水平巡检1.2h,则巡检路程为:
s=v0t=4km/h×1.2 h=4.8km;
牵引力为:
,
蓄电池储能剩余:
E=E0-P0t=0.2kW h 0.1kW×1.2h=0.08 kW h;
(4)由题意可知,AB段转化为的电能为:
1×105J×0.45=4.5×104J=0.0125 kW h,
机器人到达B点时,蓄电池储能为:
0.95E0+0.0125 kW h=0.95×0.2 kW h+0.0125 kW h=0.2025 kW h,
0.2025 kW h>0.2kW h,
即超过了蓄电池满电时储存的电能,所以此时蓄电池实际储能为0.2kW h;
由题可知,当蓄电池储能降至0.1E0时,停止电能输出,巡检终止,
所以水平阶段可用的电能为:
0.2kW h 0.1×0.2kW h=0.18kW h=6.48×105J;
水平阶段的牵引力为:
F=f=0.15G=0.15×54kg×10N/kg=81N,
则水平阶段匀速巡检的最大路程为:
。
故答案为:(1)电磁感应;(2)化学;(3)4.8;90;0.08;(4)8000。
(1)发电机的原理是电磁感应现象;
(2)下坡巡检时,电机可将重力势能转化为电能并为蓄电池充电,将能量以化学能的行驶储存起来。
(3)根据s=v0t算出巡检路程,根据算出牵引力,根据E=E0-P0t算出剩余蓄电池的储能;
(4)根据“重力势能每减少1J,转化为电能并储存在蓄电池中的能量为0.45J”算出AB段转化的电能;进而算出蓄电池储能和水平阶段可用的电能,根据水平阶段机器人所受阻力大小是重力的0.15倍算出水平阶段牵引力,根据W=Fs算出水平阶段最大路程。
46.(1)上
(2)N;费力
(3)B
(4)减小的阻值/增大电源电压
(1)天然气主要成分是甲烷,其密度比空气小。燃气泄漏时,天然气会向上扩散,所以燃气报警器应安装在燃气灶附近的上方区域,以便及时检测到泄漏的燃气。
(2)根据安培定则,用右手握住螺线管,让四指指向螺线管中电流的方向,则大拇指所指的那端就是螺线管的N极。在图甲控制电路中,电流从电磁铁的下端流入,上端流出,所以电磁铁上端是N极。对于杠杆AOB,弹簧对A端的拉力为动力,电磁铁对B端的吸引力为阻力,支点为O。观察图可知,动力臂小于阻力臂,根据杠杆分类,动力臂小于阻力臂的杠杆是费力杠杆,所以此时杠杆AOB是费力杠杆。
(3)控制电路中电磁铁的工作原理是电流的磁效应,即通电导体周围存在磁场。
A图验电器的工作原理是同种电荷相互排斥;
B图所示是奥斯特实验,演示了电流的磁效应,与电磁铁工作原理相同;
C图所示是电磁感应现象,是闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中产生感应电流;
D图所示是交流发电机工作原理,属于电磁感应现象。
故选B。
(4)由图乙知,燃气浓度越低,气敏电阻R1阻值越大。根据欧姆定律可知,在电源电压U一定时,电磁铁能将衔铁吸下报警即控制电路中电流一定,则电路总电阻不变,由串联电路电阻规律知要使燃气浓度较低,即R1阻值大时报警,可以减小滑动变阻器R2的阻值;或者换用电压更高的电源,也能使燃气报警器的预设值调低。
(1)根据密度比空气小的气体会向上扩散分析。
(2)根据安培定则,判断螺线管的N极。根据杠杆分类,动力臂小于阻力臂的杠杆是费力杠杆。
(3)控制电路中电磁铁的工作原理是电流的磁效应,即通电导体周围存在磁场;验电器的工作原理是同种电荷相互排斥;奥斯特实验演示了电流的磁效应;电磁感应现象是闭合电路的一部分导体在磁场中做切割磁感线运动时,导体中产生感应电流,是发电机的工作原理。
(4)由图乙知,燃气浓度越低,气敏电阻R1阻值越大。根据欧姆定律知电压和电流不变时,电阻不变,由串联电路电阻规律知要使燃气浓度较低,即R1阻值大时报警,可以减小滑动变阻器R2的阻值或者换用电压更高的电源。
47.(1)电磁波;通电导线在磁场中受到力的作用(或通电线圈在磁场中受到力的作用而转动)
(2)解:机器人跑步的平均速度
(3)解:机器人对地面的压力
机器人和货物的总质量
货物的质量
(1) 技术人员与人形机器人之间可通过无线网络传递信息,这是利用电磁波实现的,电动机的原理是磁场对电流有力的作用,使得通电线圈在磁场中受力转动。
(1)无线网络通过电磁波传递信息;电动机利用磁场对电流的作用力工作的;
(2)根据计算速度;
(3)根据压强公式F=pS计算压力,压力等于总重力结合重力公式G=mg计算。
21世纪教育网(www.21cnjy.com)
同课章节目录