浙江省宁波市2024-2025学年高二下学期6月期末考试通用技术试卷(含答案)
文档属性
| 名称 | 浙江省宁波市2024-2025学年高二下学期6月期末考试通用技术试卷(含答案) |
|
|
| 格式 | docx | ||
| 文件大小 | 836.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2025-07-17 00:00:00 | ||
图片预览
文档简介
浙江省宁波市2024-2025学年高二下学期期末考试技术试题-高中通用技术
一、选择题
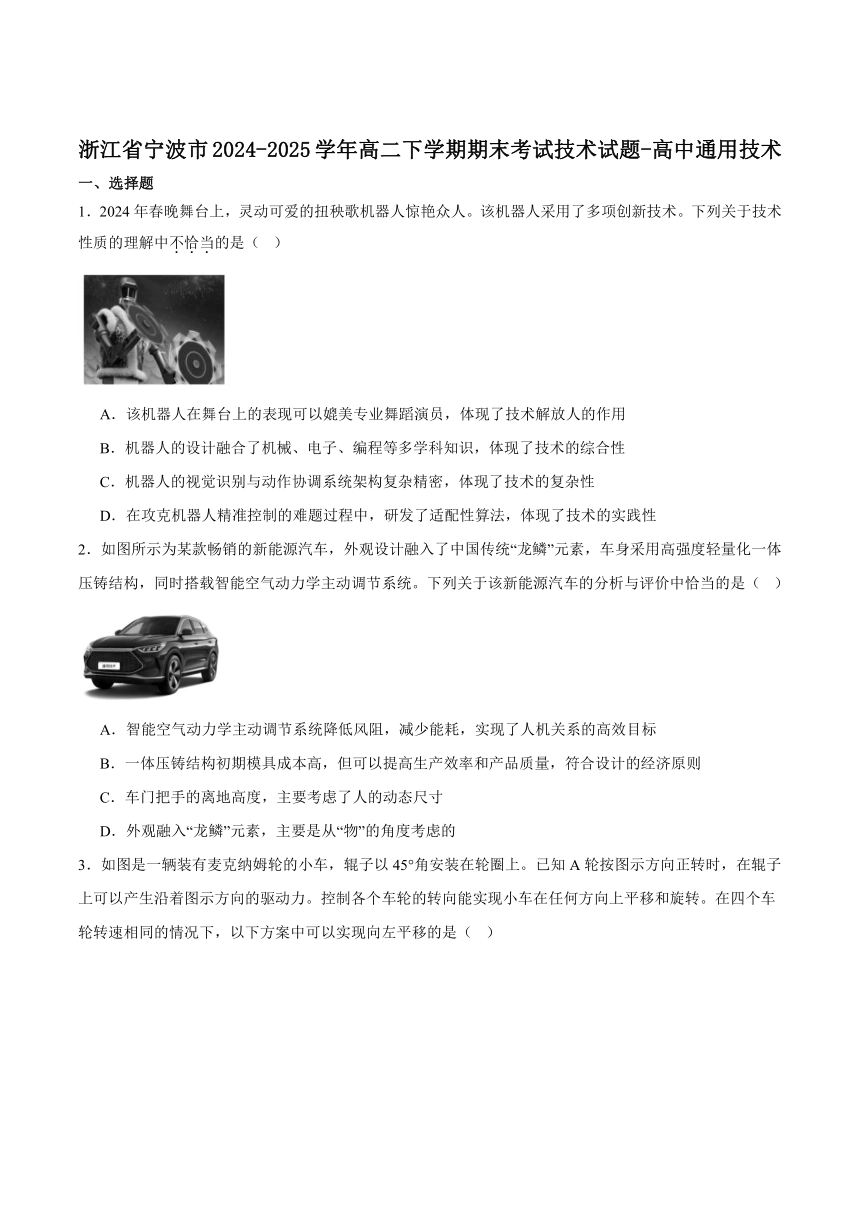
1.2024年春晚舞台上,灵动可爱的扭秧歌机器人惊艳众人。该机器人采用了多项创新技术。下列关于技术性质的理解中不恰当的是( )
A.该机器人在舞台上的表现可以媲美专业舞蹈演员,体现了技术解放人的作用
B.机器人的设计融合了机械、电子、编程等多学科知识,体现了技术的综合性
C.机器人的视觉识别与动作协调系统架构复杂精密,体现了技术的复杂性
D.在攻克机器人精准控制的难题过程中,研发了适配性算法,体现了技术的实践性
2.如图所示为某款畅销的新能源汽车,外观设计融入了中国传统“龙鳞”元素,车身采用高强度轻量化一体压铸结构,同时搭载智能空气动力学主动调节系统。下列关于该新能源汽车的分析与评价中恰当的是( )
A.智能空气动力学主动调节系统降低风阻,减少能耗,实现了人机关系的高效目标
B.一体压铸结构初期模具成本高,但可以提高生产效率和产品质量,符合设计的经济原则
C.车门把手的离地高度,主要考虑了人的动态尺寸
D.外观融入“龙鳞”元素,主要是从“物”的角度考虑的
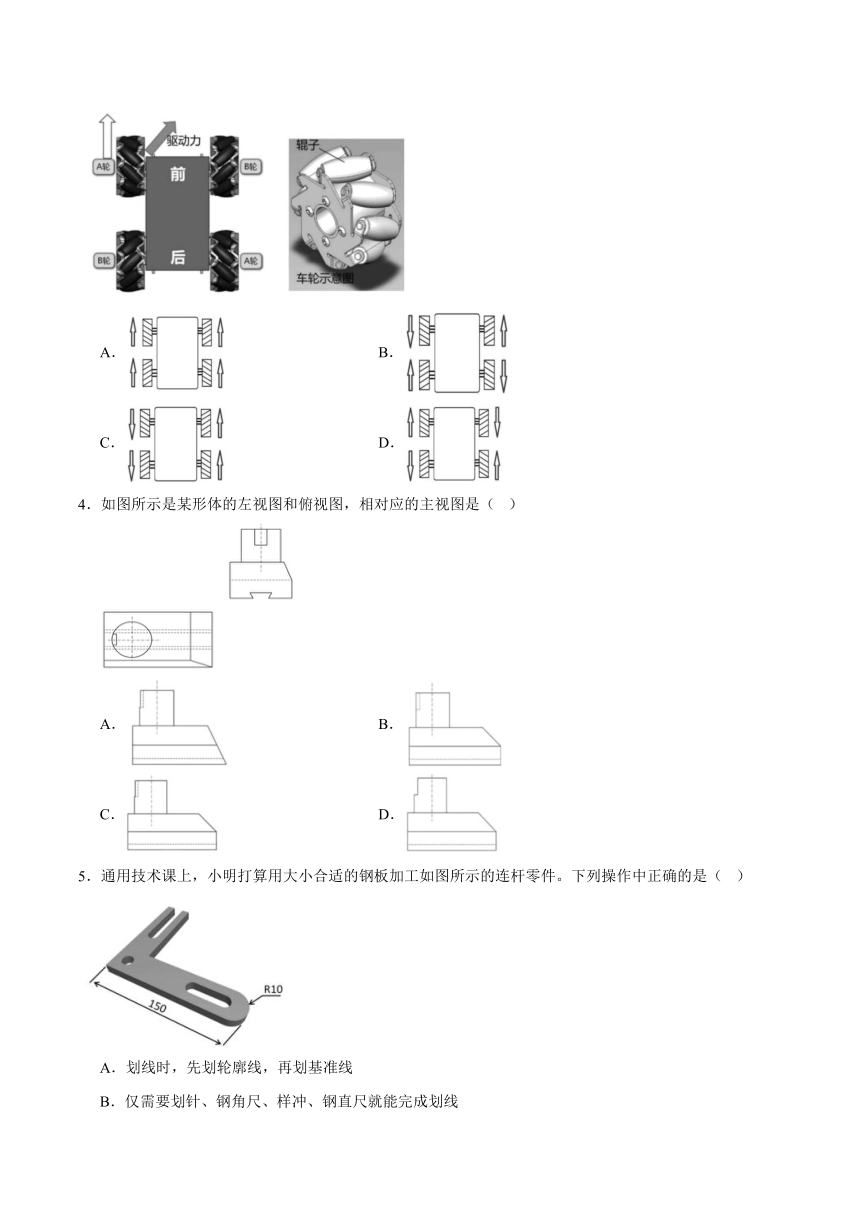
3.如图是一辆装有麦克纳姆轮的小车,辊子以45°角安装在轮圈上。已知A轮按图示方向正转时,在辊子上可以产生沿着图示方向的驱动力。控制各个车轮的转向能实现小车在任何方向上平移和旋转。在四个车轮转速相同的情况下,以下方案中可以实现向左平移的是( )
A. B.
C. D.
4.如图所示是某形体的左视图和俯视图,相对应的主视图是( )
A. B.
C. D.
5.通用技术课上,小明打算用大小合适的钢板加工如图所示的连杆零件。下列操作中正确的是( )
A.划线时,先划轮廓线,再划基准线
B.仅需要划针、钢角尺、样冲、钢直尺就能完成划线
C.加工腰形孔时,可先钻排孔,然后用圆锉完成锉削
D.加工该工件最合理的流程为划线→钻孔→锯割→锉削
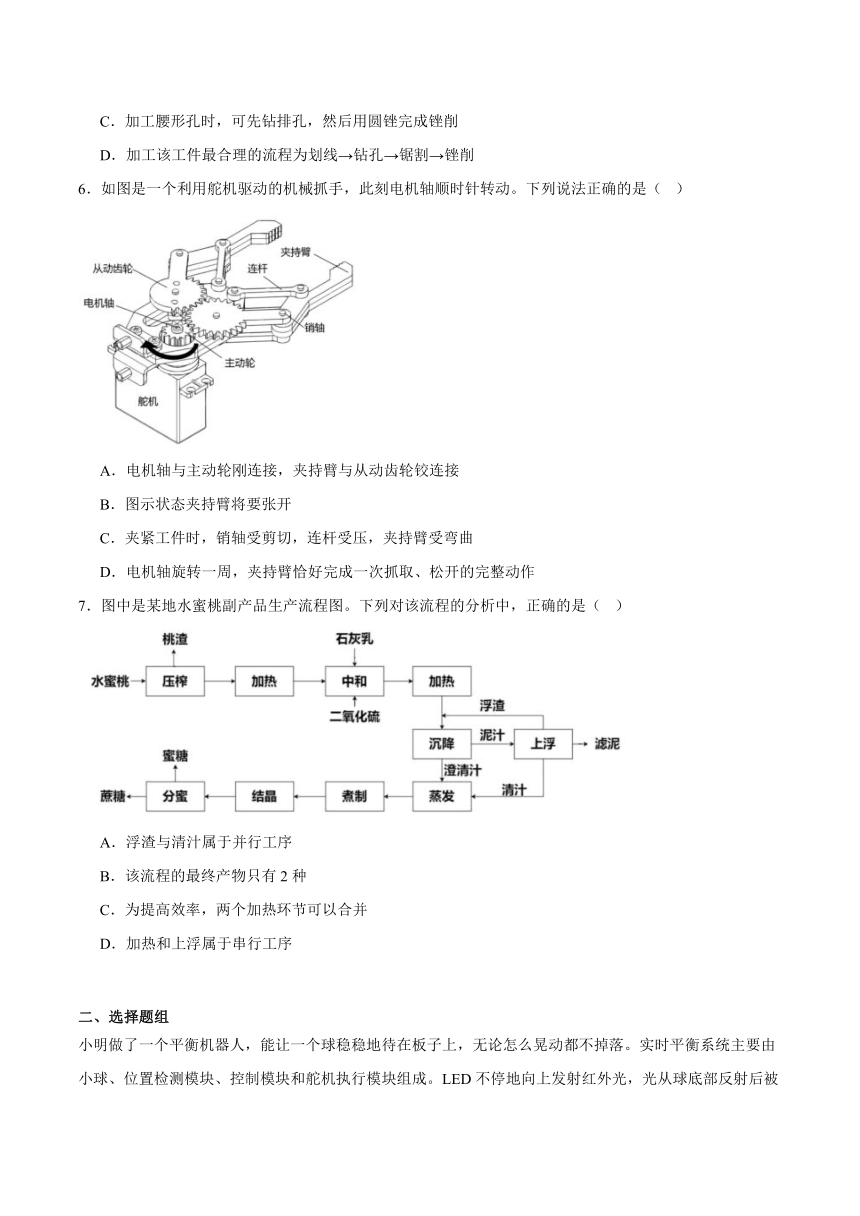
6.如图是一个利用舵机驱动的机械抓手,此刻电机轴顺时针转动。下列说法正确的是( )
A.电机轴与主动轮刚连接,夹持臂与从动齿轮铰连接
B.图示状态夹持臂将要张开
C.夹紧工件时,销轴受剪切,连杆受压,夹持臂受弯曲
D.电机轴旋转一周,夹持臂恰好完成一次抓取、松开的完整动作
7.图中是某地水蜜桃副产品生产流程图。下列对该流程的分析中,正确的是( )
A.浮渣与清汁属于并行工序
B.该流程的最终产物只有2种
C.为提高效率,两个加热环节可以合并
D.加热和上浮属于串行工序
二、选择题组
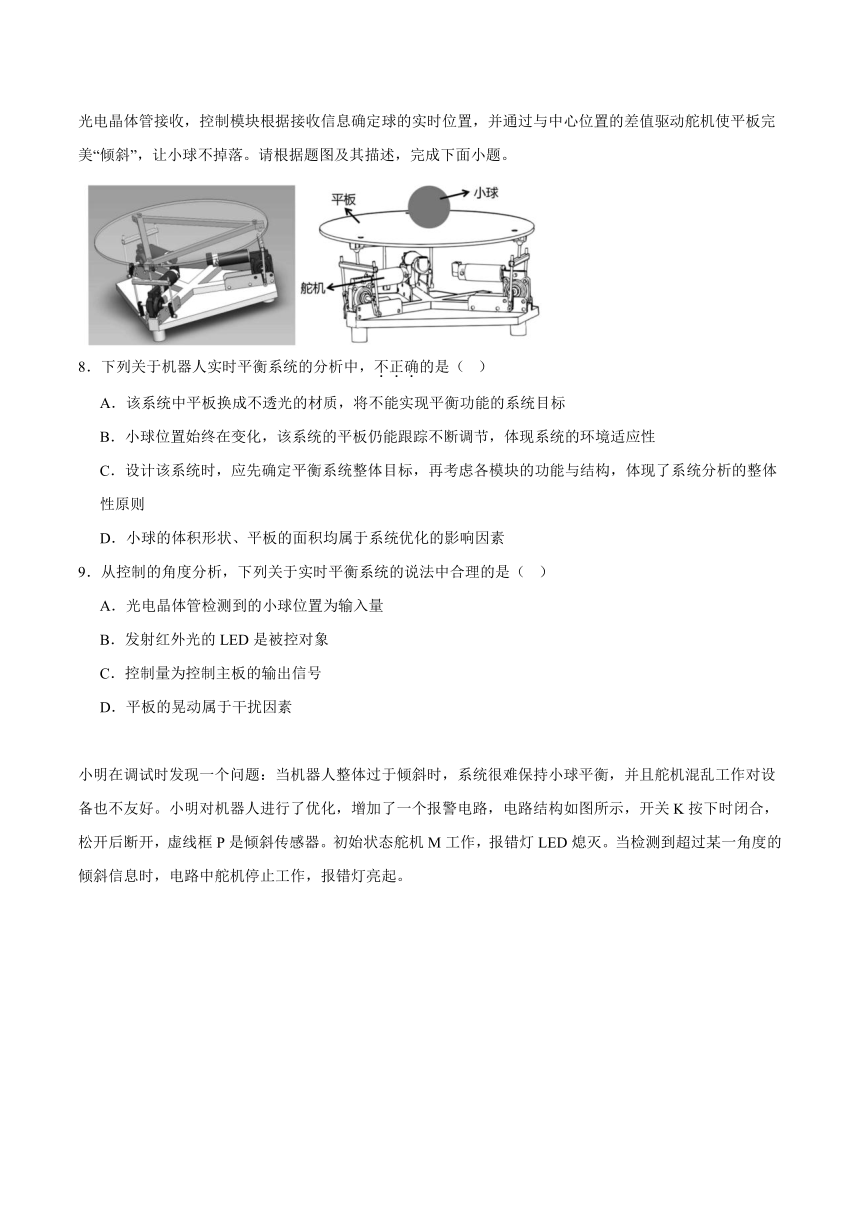
小明做了一个平衡机器人,能让一个球稳稳地待在板子上,无论怎么晃动都不掉落。实时平衡系统主要由小球、位置检测模块、控制模块和舵机执行模块组成。LED不停地向上发射红外光,光从球底部反射后被光电晶体管接收,控制模块根据接收信息确定球的实时位置,并通过与中心位置的差值驱动舵机使平板完美“倾斜”,让小球不掉落。请根据题图及其描述,完成下面小题。
8.下列关于机器人实时平衡系统的分析中,不正确的是( )
A.该系统中平板换成不透光的材质,将不能实现平衡功能的系统目标
B.小球位置始终在变化,该系统的平板仍能跟踪不断调节,体现系统的环境适应性
C.设计该系统时,应先确定平衡系统整体目标,再考虑各模块的功能与结构,体现了系统分析的整体性原则
D.小球的体积形状、平板的面积均属于系统优化的影响因素
9.从控制的角度分析,下列关于实时平衡系统的说法中合理的是( )
A.光电晶体管检测到的小球位置为输入量
B.发射红外光的LED是被控对象
C.控制量为控制主板的输出信号
D.平板的晃动属于干扰因素
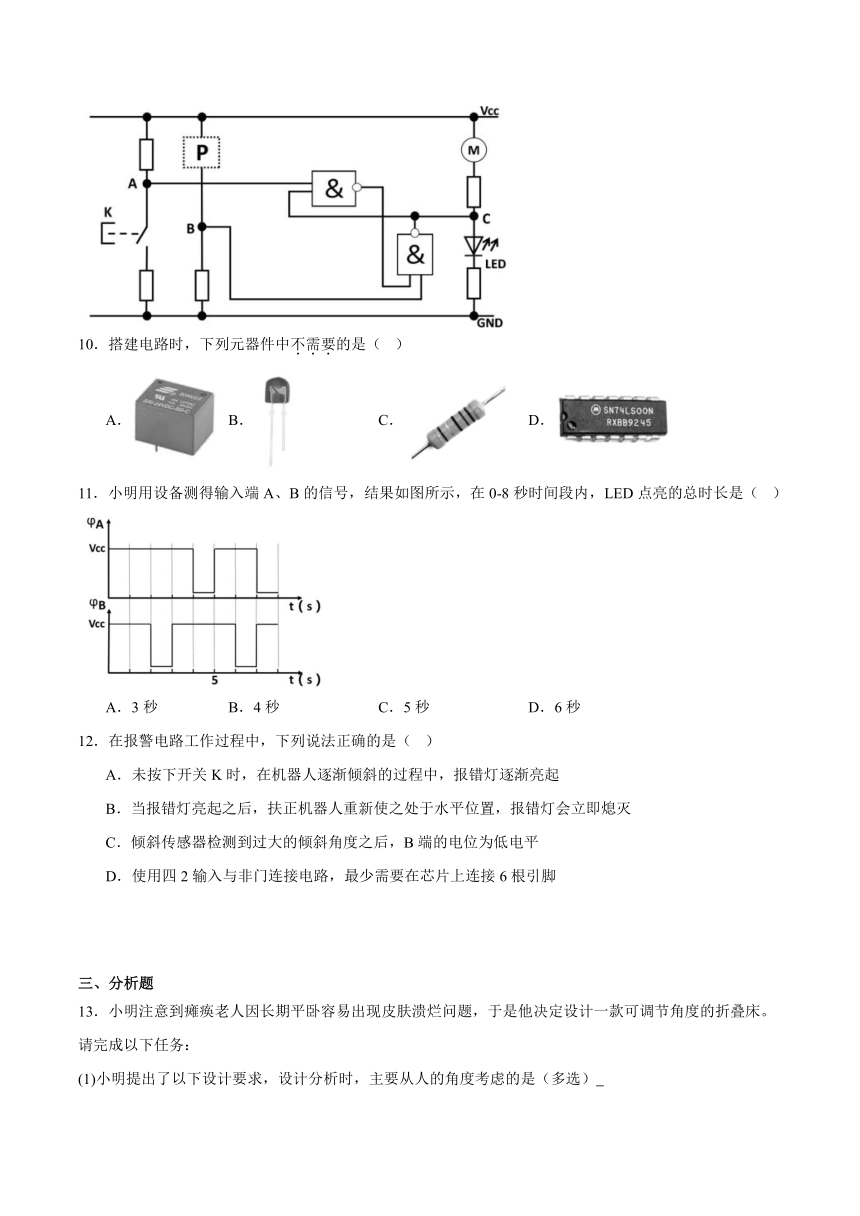
小明在调试时发现一个问题:当机器人整体过于倾斜时,系统很难保持小球平衡,并且舵机混乱工作对设备也不友好。小明对机器人进行了优化,增加了一个报警电路,电路结构如图所示,开关K按下时闭合,松开后断开,虚线框P是倾斜传感器。初始状态舵机M工作,报错灯LED熄灭。当检测到超过某一角度的倾斜信息时,电路中舵机停止工作,报错灯亮起。
10.搭建电路时,下列元器件中不需要的是( )
A. B. C. D.
11.小明用设备测得输入端A、B的信号,结果如图所示,在0-8秒时间段内,LED点亮的总时长是( )
A.3秒 B.4秒 C.5秒 D.6秒
12.在报警电路工作过程中,下列说法正确的是( )
A.未按下开关K时,在机器人逐渐倾斜的过程中,报错灯逐渐亮起
B.当报错灯亮起之后,扶正机器人重新使之处于水平位置,报错灯会立即熄灭
C.倾斜传感器检测到过大的倾斜角度之后,B端的电位为低电平
D.使用四2输入与非门连接电路,最少需要在芯片上连接6根引脚
三、分析题
13.小明注意到瘫痪老人因长期平卧容易出现皮肤溃烂问题,于是他决定设计一款可调节角度的折叠床。请完成以下任务:
(1)小明提出了以下设计要求,设计分析时,主要从人的角度考虑的是(多选)
A.可使背部在0度到60度任意位置固定
B.床在角度调整过程中,不能发出刺耳的声音
C.支撑脚底下安有橡胶垫,防止划伤地板
D.能够匹配市面上常见的标准尺寸床垫
E.内部多处安装偏心马达,实现均匀振动按摩功能
(2)根据设计的一般过程,以下属于制订设计方案环节的是(单选)
A.制订设计计划 B.选择合适的工艺进行加工
C.制作功能模型用于性能测试 D.采用联想法构思折叠结构
(3)小明发出语音指令对折叠床的语音控制系统进行测试,该系统通过麦克风接收声音,MCU进行语音识别,计算出相应步进电机所需转动角度,步进电机带动螺杆转动,从而改变背部的倾斜度。请根据题图及其描述填写该控制系统的方框图(填写文字)
1. 、2.
四、综合题
14.如图是侧柱型遮阳伞,通过把手上下移动实现伞面伸展和收拢。由于遮阳伞较为沉重,单人难以操作,小明想将其改为电机驱动的自动遮阳伞。已知立柱管径约5cm,高2.5m。请你设计机械部分,设计要求如下:
(a)装置采用电机驱动使遮阳伞自动展开和关闭:
(b)装置结构稳定,遮阳伞展开后可以在任意位置锁定;
(c)把手上下移动范围为80cm;
(d)可对原遮阳伞进行适当加工。
请完成以下任务:
(1)小明在构思方案时,首先对连接方式和机械传动方式的可能方案进行罗列,通过组合得到多方案,然后进行分析和评估。小明采用的方案构思方法是(单选)
A.联想法 B.模仿法 C.形态分析法
(2)在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图,电机可用方框表示,简要说明方案的工作过程;
(3)在草图上标注主要尺寸。
15.小明准备用磁铁和干簧管实现自动遮阳伞设计,如图a所示。图b所示是小明设计的电机驱动电路,不同方向的电流使电机实现正反转效果。按下开关K1,电流正向经过电动机,电机正转,带动遮阳伞打开,磁铁升到顶部时,触发限位干簧管断开电路,此时断开K1;收拢遮阳伞时按下开关K2,电机反转,带动遮阳伞返回到初始位置后断开K2。为使电路正常工作,K1,K2不能同时闭合。请完成以下任务。
(1)以下关于干簧管的安装位置,正确的是(单选)
A.S1在上方,S2在下方 B.S1在下方,S2在上方 C.AB选项均可
(2)关于题图中二极管的作用,以下正确的是(单选)
A.保护继电器 B.保护三极管 C.保护干簧管
(3)为了实现不同方向的电流使电机达到正反转效果,继电器J1、J2的初始连接方案合理的是(单选)
A. B. C. D.
(4)小明利用适当的电子元器件连接电路,已知下图中的三极管为NPN型,请完成题图虚线框1内电路的实物连线。
参考答案
1.A
2.B
3.B
4.C
5.D
6.A
7.A
8.B 9.D
10.A 11.A 12.C
13.(1)ABE
(2)D
(3) MCU 倾斜度
14.(1)C
(2)
(3)(a)可用电机驱动实现速阳伞的展开和关闭;
(b)伞打开后能自锁,有一定的强度;
(c)装置上下移动范围为80cm;
15.(1)A
(2)B
(3)D
(4)
一、选择题
1.2024年春晚舞台上,灵动可爱的扭秧歌机器人惊艳众人。该机器人采用了多项创新技术。下列关于技术性质的理解中不恰当的是( )
A.该机器人在舞台上的表现可以媲美专业舞蹈演员,体现了技术解放人的作用
B.机器人的设计融合了机械、电子、编程等多学科知识,体现了技术的综合性
C.机器人的视觉识别与动作协调系统架构复杂精密,体现了技术的复杂性
D.在攻克机器人精准控制的难题过程中,研发了适配性算法,体现了技术的实践性
2.如图所示为某款畅销的新能源汽车,外观设计融入了中国传统“龙鳞”元素,车身采用高强度轻量化一体压铸结构,同时搭载智能空气动力学主动调节系统。下列关于该新能源汽车的分析与评价中恰当的是( )
A.智能空气动力学主动调节系统降低风阻,减少能耗,实现了人机关系的高效目标
B.一体压铸结构初期模具成本高,但可以提高生产效率和产品质量,符合设计的经济原则
C.车门把手的离地高度,主要考虑了人的动态尺寸
D.外观融入“龙鳞”元素,主要是从“物”的角度考虑的
3.如图是一辆装有麦克纳姆轮的小车,辊子以45°角安装在轮圈上。已知A轮按图示方向正转时,在辊子上可以产生沿着图示方向的驱动力。控制各个车轮的转向能实现小车在任何方向上平移和旋转。在四个车轮转速相同的情况下,以下方案中可以实现向左平移的是( )
A. B.
C. D.
4.如图所示是某形体的左视图和俯视图,相对应的主视图是( )
A. B.
C. D.
5.通用技术课上,小明打算用大小合适的钢板加工如图所示的连杆零件。下列操作中正确的是( )
A.划线时,先划轮廓线,再划基准线
B.仅需要划针、钢角尺、样冲、钢直尺就能完成划线
C.加工腰形孔时,可先钻排孔,然后用圆锉完成锉削
D.加工该工件最合理的流程为划线→钻孔→锯割→锉削
6.如图是一个利用舵机驱动的机械抓手,此刻电机轴顺时针转动。下列说法正确的是( )
A.电机轴与主动轮刚连接,夹持臂与从动齿轮铰连接
B.图示状态夹持臂将要张开
C.夹紧工件时,销轴受剪切,连杆受压,夹持臂受弯曲
D.电机轴旋转一周,夹持臂恰好完成一次抓取、松开的完整动作
7.图中是某地水蜜桃副产品生产流程图。下列对该流程的分析中,正确的是( )
A.浮渣与清汁属于并行工序
B.该流程的最终产物只有2种
C.为提高效率,两个加热环节可以合并
D.加热和上浮属于串行工序
二、选择题组
小明做了一个平衡机器人,能让一个球稳稳地待在板子上,无论怎么晃动都不掉落。实时平衡系统主要由小球、位置检测模块、控制模块和舵机执行模块组成。LED不停地向上发射红外光,光从球底部反射后被光电晶体管接收,控制模块根据接收信息确定球的实时位置,并通过与中心位置的差值驱动舵机使平板完美“倾斜”,让小球不掉落。请根据题图及其描述,完成下面小题。
8.下列关于机器人实时平衡系统的分析中,不正确的是( )
A.该系统中平板换成不透光的材质,将不能实现平衡功能的系统目标
B.小球位置始终在变化,该系统的平板仍能跟踪不断调节,体现系统的环境适应性
C.设计该系统时,应先确定平衡系统整体目标,再考虑各模块的功能与结构,体现了系统分析的整体性原则
D.小球的体积形状、平板的面积均属于系统优化的影响因素
9.从控制的角度分析,下列关于实时平衡系统的说法中合理的是( )
A.光电晶体管检测到的小球位置为输入量
B.发射红外光的LED是被控对象
C.控制量为控制主板的输出信号
D.平板的晃动属于干扰因素
小明在调试时发现一个问题:当机器人整体过于倾斜时,系统很难保持小球平衡,并且舵机混乱工作对设备也不友好。小明对机器人进行了优化,增加了一个报警电路,电路结构如图所示,开关K按下时闭合,松开后断开,虚线框P是倾斜传感器。初始状态舵机M工作,报错灯LED熄灭。当检测到超过某一角度的倾斜信息时,电路中舵机停止工作,报错灯亮起。
10.搭建电路时,下列元器件中不需要的是( )
A. B. C. D.
11.小明用设备测得输入端A、B的信号,结果如图所示,在0-8秒时间段内,LED点亮的总时长是( )
A.3秒 B.4秒 C.5秒 D.6秒
12.在报警电路工作过程中,下列说法正确的是( )
A.未按下开关K时,在机器人逐渐倾斜的过程中,报错灯逐渐亮起
B.当报错灯亮起之后,扶正机器人重新使之处于水平位置,报错灯会立即熄灭
C.倾斜传感器检测到过大的倾斜角度之后,B端的电位为低电平
D.使用四2输入与非门连接电路,最少需要在芯片上连接6根引脚
三、分析题
13.小明注意到瘫痪老人因长期平卧容易出现皮肤溃烂问题,于是他决定设计一款可调节角度的折叠床。请完成以下任务:
(1)小明提出了以下设计要求,设计分析时,主要从人的角度考虑的是(多选)
A.可使背部在0度到60度任意位置固定
B.床在角度调整过程中,不能发出刺耳的声音
C.支撑脚底下安有橡胶垫,防止划伤地板
D.能够匹配市面上常见的标准尺寸床垫
E.内部多处安装偏心马达,实现均匀振动按摩功能
(2)根据设计的一般过程,以下属于制订设计方案环节的是(单选)
A.制订设计计划 B.选择合适的工艺进行加工
C.制作功能模型用于性能测试 D.采用联想法构思折叠结构
(3)小明发出语音指令对折叠床的语音控制系统进行测试,该系统通过麦克风接收声音,MCU进行语音识别,计算出相应步进电机所需转动角度,步进电机带动螺杆转动,从而改变背部的倾斜度。请根据题图及其描述填写该控制系统的方框图(填写文字)
1. 、2.
四、综合题
14.如图是侧柱型遮阳伞,通过把手上下移动实现伞面伸展和收拢。由于遮阳伞较为沉重,单人难以操作,小明想将其改为电机驱动的自动遮阳伞。已知立柱管径约5cm,高2.5m。请你设计机械部分,设计要求如下:
(a)装置采用电机驱动使遮阳伞自动展开和关闭:
(b)装置结构稳定,遮阳伞展开后可以在任意位置锁定;
(c)把手上下移动范围为80cm;
(d)可对原遮阳伞进行适当加工。
请完成以下任务:
(1)小明在构思方案时,首先对连接方式和机械传动方式的可能方案进行罗列,通过组合得到多方案,然后进行分析和评估。小明采用的方案构思方法是(单选)
A.联想法 B.模仿法 C.形态分析法
(2)在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图,电机可用方框表示,简要说明方案的工作过程;
(3)在草图上标注主要尺寸。
15.小明准备用磁铁和干簧管实现自动遮阳伞设计,如图a所示。图b所示是小明设计的电机驱动电路,不同方向的电流使电机实现正反转效果。按下开关K1,电流正向经过电动机,电机正转,带动遮阳伞打开,磁铁升到顶部时,触发限位干簧管断开电路,此时断开K1;收拢遮阳伞时按下开关K2,电机反转,带动遮阳伞返回到初始位置后断开K2。为使电路正常工作,K1,K2不能同时闭合。请完成以下任务。
(1)以下关于干簧管的安装位置,正确的是(单选)
A.S1在上方,S2在下方 B.S1在下方,S2在上方 C.AB选项均可
(2)关于题图中二极管的作用,以下正确的是(单选)
A.保护继电器 B.保护三极管 C.保护干簧管
(3)为了实现不同方向的电流使电机达到正反转效果,继电器J1、J2的初始连接方案合理的是(单选)
A. B. C. D.
(4)小明利用适当的电子元器件连接电路,已知下图中的三极管为NPN型,请完成题图虚线框1内电路的实物连线。
参考答案
1.A
2.B
3.B
4.C
5.D
6.A
7.A
8.B 9.D
10.A 11.A 12.C
13.(1)ABE
(2)D
(3) MCU 倾斜度
14.(1)C
(2)
(3)(a)可用电机驱动实现速阳伞的展开和关闭;
(b)伞打开后能自锁,有一定的强度;
(c)装置上下移动范围为80cm;
15.(1)A
(2)B
(3)D
(4)
同课章节目录