11.1 杠杆 教学课件(共52张PPT)2025-2026学年苏科版九年级上册
文档属性
| 名称 | 11.1 杠杆 教学课件(共52张PPT)2025-2026学年苏科版九年级上册 |
|
|
| 格式 | pptx | ||
| 文件大小 | 69.7MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-07-18 00:00:00 | ||
图片预览
文档简介
(共52张PPT)
苏科版 九年级上册
第十一章 简单机械和功
一、杠杆
01
02
03
04
05
CONTENTS
杠杆原理的应用
什么是杠杆
探究杠杆平衡的条件
杠杆动态平衡分析
学习目标
1. 知道什么是杠杆及杠杆五要素;
2. 会画杠杆的力臂;
3. 理解杠杆的平衡条件及应用,
4. 根据杠杆平衡条件进行有关计算;
5. 会判断省力杠杆、等臂杠杆和费力杠杆;
6. 知道分析探究析杠杆平衡条件实验;
7. 根据杠杆五要素、杠杆平衡条件学会综合分析杠杆动态平衡问题。
重点难点
教学重点:
1.杠杆及杠杆的五要素;
2.杠杆平衡条件及其探究实验过程;
3.杠杆原理的应用(杠杆的分类)。
1.分析实际生活中复杂的杠杆模型,确定杠杆的五要素,并解决有关问题;
2.尝试解决探究杠杆平衡条件实验中所遇到的问题;
3.分析杠杆动态平衡问题;
4.杠杆在其他物理模块的应用,如压强与浮力。
教学难点:
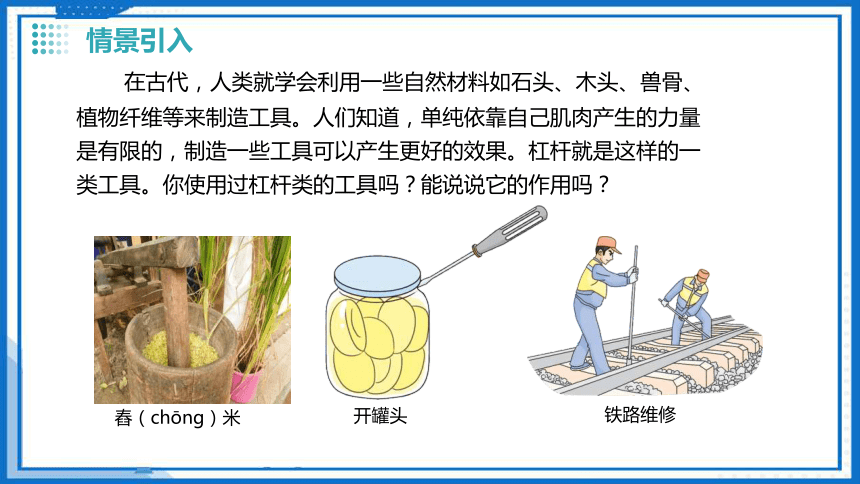
在古代,人类就学会利用一些自然材料如石头、木头、兽骨、植物纤维等来制造工具。人们知道,单纯依靠自己肌肉产生的力量是有限的,制造一些工具可以产生更好的效果。杠杆就是这样的一类工具。你使用过杠杆类的工具吗?能说说它的作用吗?
开罐头
铁路维修
舂(chōng)米
情景引入
PART ONE
什么是杠杆
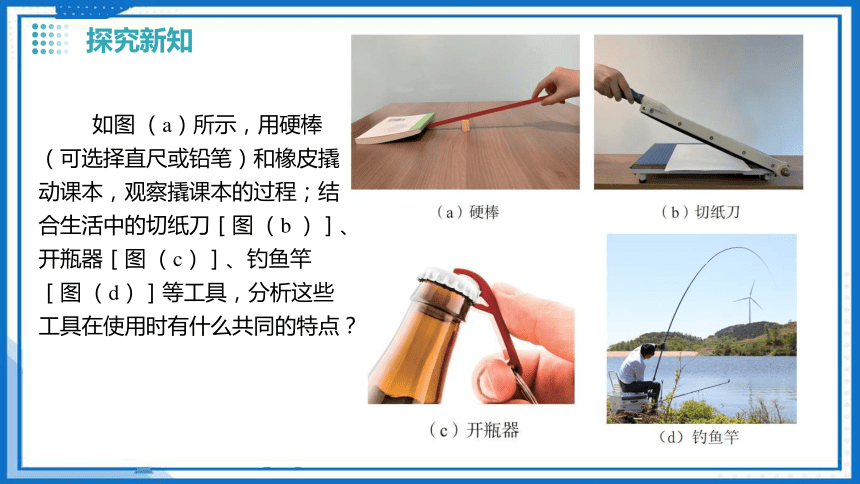
如图 (a)所示,用硬棒(可选择直尺或铅笔)和橡皮撬动课本,观察撬课本的过程;结合生活中的切纸刀[图 (b )]、开瓶器[图 (c)]、钓鱼竿[图 (d)]等工具,分析这些工具在使用时有什么共同的特点?
探究新知
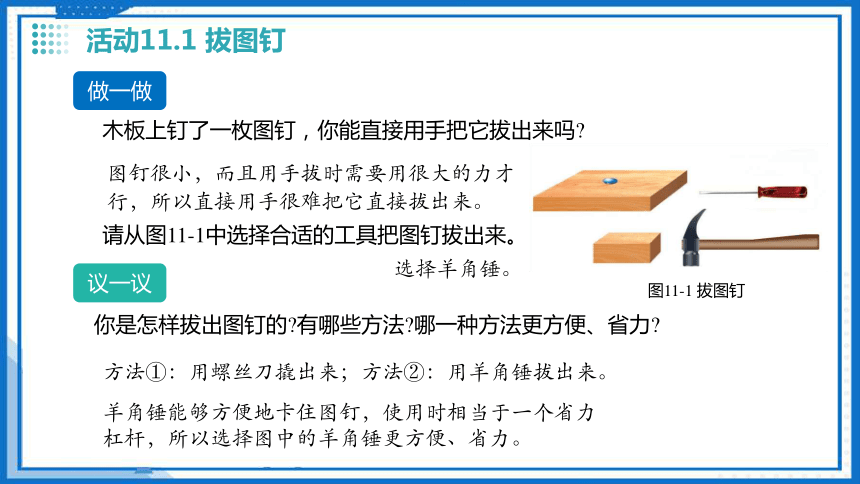
木板上钉了一枚图钉,你能直接用手把它拔出来吗
活动11.1 拔图钉
做一做
议一议
你是怎样拔出图钉的 有哪些方法 哪一种方法更方便、省力
方法①:用螺丝刀撬出来;方法②:用羊角锤拔出来。
图钉很小,而且用手拔时需要用很大的力才行,所以直接用手很难把它直接拔出来。
请从图11-1中选择合适的工具把图钉拔出来。
选择羊角锤。
羊角锤能够方便地卡住图钉,使用时相当于一个省力杠杆,所以选择图中的羊角锤更方便、省力。
图11-1 拔图钉
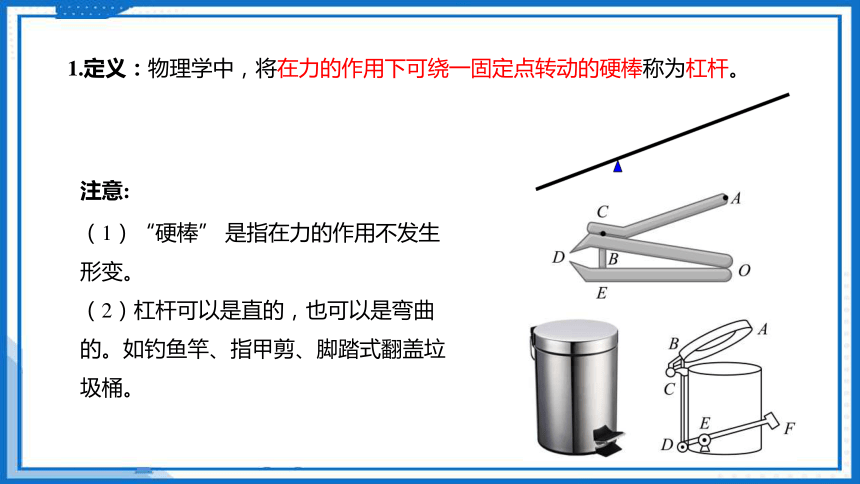
1.定义:物理学中,将在力的作用下可绕一固定点转动的硬棒称为杠杆。
注意:
(1)“硬棒” 是指在力的作用不发生形变。
(2)杠杆可以是直的,也可以是弯曲的。如钓鱼竿、指甲剪、脚踏式翻盖垃圾桶。
O
l1
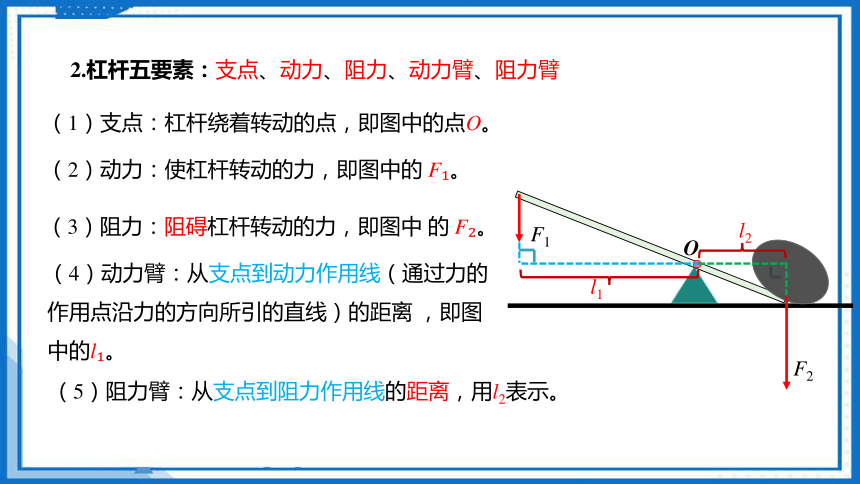
2.杠杆五要素:支点、动力、阻力、动力臂、阻力臂
(1)支点:杠杆绕着转动的点,即图中的点O。
(2)动力:使杠杆转动的力,即图中的 F 。
(3)阻力:阻碍杠杆转动的力,即图中 的 F 。
(4)动力臂:从支点到动力作用线(通过力的作用点沿力的方向所引的直线)的距离 ,即图中的l 。
(5)阻力臂:从支点到阻力作用线的距离,用l2表示。
l2
F1
F2
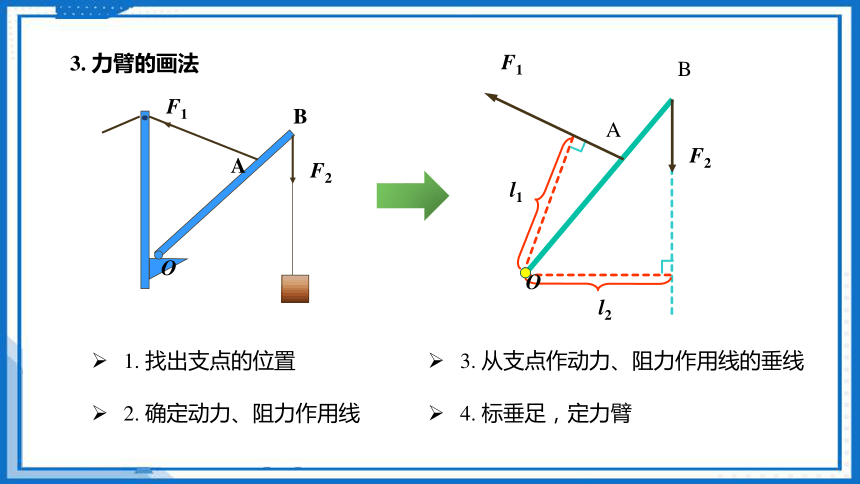
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,定力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
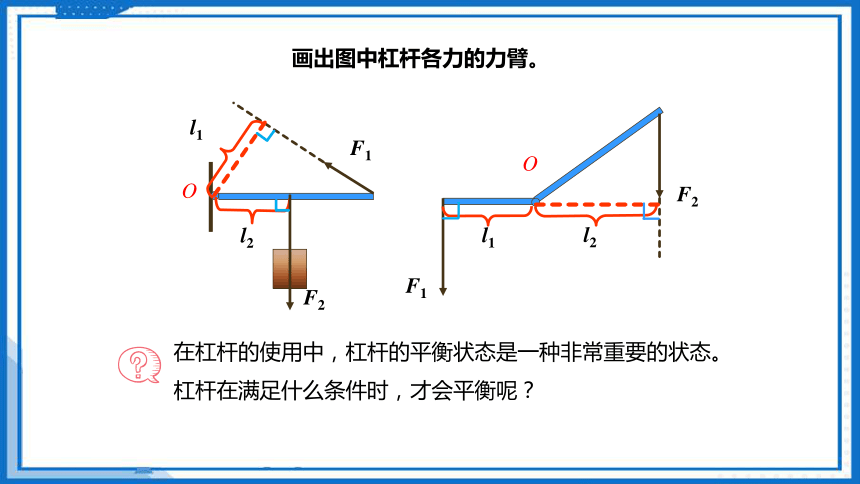
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。
杠杆在满足什么条件时,才会平衡呢?
画出图中杠杆各力的力臂。
PART TWO
探究杠杆平衡的条件
学生实验:探究杠杆平衡的条件
信息快递:当杠杆在动力和阻力的作用下静止时,我们就说杠杆处于平衡状态。
1.安装杠杆,调节杠杆两端的平衡螺母,使之在水平位置平衡 。
实验与记录
2. 如图11-4所示,在杠杆左边挂一定数量的钩码,用弹簧测力计在杠杆右边某一位
置竖直拉住杠杆。设弹簧测力计对杠杆竖直向下的拉力F 是动力,动力臂为l ;钩码对杠杆的拉力F 是阻力,阻力臂为l 。
当杠杆在水平位置平衡时 ,测量F 、 l 、F 、l 的大小 , 并将数据记录在下表中 。
图11-4 探究杠杆的平衡条件
序号 F /N l /cm F /N l2/cm
①
②
③
④
3.在下列情况下使杠杆在水平位置平衡,将相关数据记录在上表中:
(1)保持钩码和弹簧测力计的位置不变,改变钩码的数量。
(2)保持钩码的数量和位置不变,改变弹簧测力计的位置。
(3)保持弹簧测力计的位置和钩码的数量不变,改变钩码的位置。
6
2.0
3.0
4
4
6
4.0
6.0
2.0
12
4
6.0
8
4.0
12
6.0
分析表中数据,找出它们之间的关系。你有什么发现
交流与小结
杠杆的平衡条件也称杠杆原理,是由古希腊学者阿基米德总结出来的。 为了说明杠杆原理的威力,他曾说过: “假如给我一个支点,我就能推动地球”(图11-5)。我国古人也对杠杆进行过深入研究,并将杠杆广泛应用于生产和生活中。
实验表明,杠杆平衡时
动力×动力臂=阻力×阻力臂
用字母表示可写成
F 1 =F l
图11-5 阿基米德想象用杠杆移动地球
1.使杠杆在水平位置平衡的原因是什么?
避免偶然性,得出普遍规律.
2.为什么要多次实验
实验反思:
一是可直接从杠杆上读出力臂的大小;二是消除杠杆自身重力对杠杆平衡的影响。
3.教材用杠杆一端挂钩码,另一端用弹簧测力计竖直向下拉的方法做实验。请分析说明用这种方法做实验的好处是什么?
用弹簧测力计竖直向下拉杠杆时,由于测力计的力可以连续变化,容易得到所需要的力,不需要调整力臂,所以这种方法很容易使杠杆平衡。
4.若采用杠杆两端都挂钩码的方法,探究杠杆平衡条件是否可行?
可行。
实验视频—杠杆两端挂钩码探究杠杆平衡条件
在我国,人们很早就开始运用杠杆解决生产、生活中的问题。
图11-6所示是在我国湖南长沙出土的战国时期的天平和砝码。该天平配有多个砝码,最小的砝码质量约为0.6g 。这说明当时的称量已经相当精确。
《墨经》中对秤的原理作了较为科学的描述。《墨经》将被称物品叫 作“重”,砝码叫作“权”,支点到“重”的距离叫作“本”,支点到 “权”的距离叫作“标”,如图11-7所示。
读一读 中国古人对杠杆的研究和应用
明代宋应星在《天工开物》中描绘了用于捣谷的碓(图11-8)和用于汲水的桔槔(图11-9)。
PART THREE
杠杆原理的应用
我们身边有很多杠杆。例如,跷跷板、羊角锤、船桨、各种剪刀,观察这些杠杆,它们的动力臂和阻力臂有什么关系?
观察思考
羊角锤
瓶盖起子
观察思考
钓鱼竿
1.省力杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。用较小的动力就可以克服较大的阻力。(l1>l2, F1大于
小于
(3)常见的省力杠杆:瓶盖起子、羊角锤、独轮车、钳子等。
省力杠杆的实例分析
F1
F2
o
o
F2
F1
剪刀相当于两个杠杆组合在一起
l2
l1
生活中的一些省力杠杆:
2.费力杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。动力作用点移动较小的距离就可以使阻力作用点移动较大的距离。(l1F2)
大于
小于
(3)常见的费力杠杆:镊子、缝纫机脚踏板、钓鱼竿、筷子夹菜、皮划艇的桨、扫帚等。
费力杠杆的实例分析
o
F1
F2
F2
l1
l2
l2
l1
筷子相当于两个杠杆组合在一起。
人的右手与钓鱼竿接触处为支点。
o
F1
生活中的一些费力杠杆:
扫把
镊子
船桨
3.等臂杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。这样的杠杆既不省力也不费力。(L1=L2, F1=F2)
等于
等于
(3)常见的等臂杠杆:跷跷板、托盘天平。
生活中的等臂杠杆:
托盘天平
跷跷板
生活 物理 社会 生活中的剪刀
如图11-12所示,剪刀是生活中常见的工具,它也是一种杠杆。注意观察从事不同行业的人,所用的剪刀各有什么特点。
图11-12 常见的剪刀
裁缝用的剪刀刀刃比平常家用剪刀的刀刃长得多,完成一次剪裁动作可以裁剪较长的布料。
理发师用的剪刀手柄比较短,他们剪发时手的动作幅度较小, 可提高剪发的频率。
钣金工师傅剪铁皮用的剪刀,其动力臂比阻力臂长,只要用较小的力,就能把坚硬的金属片剪开。
园艺师使用的剪刀有很多种,如修整冬青树的剪刀、剪花枝的剪刀等。请你调查:园艺师使用了哪些剪刀 它们各有什么特点和用途
例题 据报道,一位物理老师在动物园内,用弹簧测力计称出了一头大象的质量。在称象过程中,他用到了吊车、铁笼和一根很长的槽钢等辅助工具, 如图11-13所示。槽钢上的悬吊点0为支点,测得动力臂l1 为 9m, 阻力臂l 为 7cm (图11-14)。槽钢在水平位置平衡时,弹簧测力计的示数为200 N。若 不计槽钢和铁笼的质量,试估算大象的质量(g 取10N/kg)。
图11-13 用杠杆称象
图11-14 称量原理示意
分析 称象过程运用了杠杆原理。若不计槽钢和铁笼的质量,则图 11-14中的F 与大象所受的重力G 大小相等。
解答 槽钢是一个杠杆,点O为支点,人通过弹簧测力计对杠杆A 端的拉力F =200 N 为动力,动力臂1 =9m; 杠杆B 端所受的拉力F 为阻力,阻力臂l =7cm=0.07m。
根据杠杆原理F l =Fl 可得
拉力F 与大象的重力G 大小相等,即F =G=mg, 所以大象的质量
反思 如果要考虑槽钢和铁笼的质量,那么在称象前应做什么准备工作
骨骼、肌肉和关节构成了人体的运动系统。尽管人体的各种运动 相当复杂,但最基本的运动都是由 骨骼绕关节转动产生的,其模型就 是杠杆。例如,当手握哑铃向上运动时(图11- 15),上臂中的肱二头肌收缩、肱三头肌伸展产生的力 使前臂骨骼绕肘关节转动。因此,前臂骨骼可以看成杠杆,肘关节是支点,哑铃对手的压力是阻力, 上臂中的肌肉对前臂骨骼施加的力则是动力。
人体有600多块肌肉,它们在神经系统的控制下,分别负责各 部位的运动。当你做抬腿、伸臂、点头、叩齿等动作时,就用到了身上各种各样的杠杆。
生活 物理 社会 从人体中的杠杆到空间站的机械臂
图11-15 举哑铃
人体中的杠杆为科技工作者的发明创造提供了很多启示,机械臂的 发明就是其生动体现。中国空间站的机械臂(图11-16)设置了多个关节, 通过这些关节的旋转,能够实现任意角度与位置的抓取等操作。它还能在空间站舱体外表面爬行,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查和大型设备维护等任务。
PART FOUR
杠杆动态平衡分析
情形1:如图,力F始终与杠杆垂直,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G 与 l 1=OA 保持不变,l 2 变大;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F变大;
情形2:如图,力F的方向保持水平向右,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G保持不变,l 2 变大,l 1变小;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F变大;
注意:此情况下杠杆不可能到达水平位置(当杠杆无限接近水平位置时,l 1无限接近于零,F无穷大)。
情形3:如图,力F的方向保持竖直向上,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G保持不变,l 2 与l 1同时变大,且比值为0.5;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F=0.5G 保持不变。
情形4:如图,杠杆保持静止,力F的方向由竖直向上变为水平向右的过程中,力F的大小如何变化?
分析:①F2与l 2 保持不变,l 1先变大后变小;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F先变小后变大(当F与杠杆垂直时F最小)。
A . 托盘天平 B .
钢丝钳
C . 开瓶扳手 D .
筷子
1 .如图所示是生活中几种常见的工具,其中可看作等臂杠杆的是 ( )
课堂练习
A
2.如图所示,用扳手拧螺帽时,图 (a/b)的握法更有利于拧紧螺帽,原因是动力臂更 (长/短)。
b
长
3.园艺师使用如图所示的剪刀修剪树枝时,为了更省力,应尽量让树枝 (靠近/远离)刀轴 O ,手握在刀柄的 (中间/末端)。使用此剪刀时 (省/ 费)距离。
靠近
末端
费
4.如图所示,人在用哑铃锻炼。将前臂从水平位置绕 O 点抬起哑铃,前臂此时相当于一个杠杆,其简化图如图乙所示。若哑铃重力为 50N,L1 = 5cm ,L2 = 20cm ,则拉力F1 = N。
200
5.如图所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态。若在 A 、B 两处再各加一个钩码,下列说法正确的是 ( )
A .杠杆右边向下倾 B .杠杆左边向下倾
C .杠杆仍平衡
D .无法确定杠杆是否平衡
A
6.如图,B 为杠杆 OA 的中点,在 B 点挂一个 20N 的重物,加在 A 点的动力使 OA 在水平位置保持静止(杠杆重力及摩擦均不计),则 ( )
A .该杠杆一定是省力杠杆
C .作用点在 A 点的最小动力等于 10N
B .该杠杆一定是费力杠杆
D .物体的重力就是杠杆所受的阻力
C
杠杆
课堂小结
杠杆的定义
杠杆的五要素
杠杆的平衡条件
杠杆动态平衡分析
杠杆原理的应用
省力杠杆
等臂杠杆
费力杠杆
什么是杠杆
杠杆平衡状态:在动力和阻力作用下静止
杠杆平衡的条件:动力×动力臂=阻力×阻力臂
动力、阻力
支点
动力臂、阻力臂
布置作业
1.指出图11-17中各个杠杆工作时的支点、动力、动力臂、阻力和阻力臂,并说明它们中哪些是省力杠杆,哪些是费力杠杆。
(a) 羊角锤
(b) 镊子
(c) 夹子
图11-17
(a) 对羊角锤而言,锤头和木板接触的部分是支点,钉子对锤施加的力是阻力,方向沿着钉子向下,支点到钉子施加的力的作用线的距离是阻力臂,手对锤柄的力是动力,支点到手施加的力的作用线的距离是动力 臂。因为它的动力臂比阻力臂长,所以是省力杠杆。
(b) 对镊子而言,支点在顶端,手对镊子向里的压力是动力,顶端到手指施加的力的作用线的距离是动力臂,所夹物品对镊子施加的力是阻力,方向向外,相应的阻力臂是顶端到物品施加的力的作用线的距离,动 力臂比阻力臂短,是费力杠杆。
(c) 对于夹子而言,夹子中间的交点处是支点,手对夹柄的压力是动力,支点到手指施加的力的作用线的距离是动力臂,使夹头向内的力是阻力,支点到使夹头向内的力的作用线的距离是阻力臂,动力臂比阻力臂长,是省力杠杆。
2. 如图所示,在“探究杠杆的平衡条件”实验中,保持杠杆水平平衡,改变弹簧测力计拉杠杆的方向,弹簧测力计的示数会改变吗 此时动力臂与支点到动力作用点的距离相等吗 试用杠杆平衡条件解释。
会改变;不相等;
解释:当保持杠杆在水平位置平衡时,如果保持弹簧测力计悬挂点不变,改变弹簧测力计拉杠杆的方向,杠杆仍然保持水平平衡。这种情况下,弹簧测力计的示数会变大,因为拉力方向倾斜后,力臂会变短,为了保持杠杆平衡,拉力需要增大 。
感谢观看
THANK YOU FOR WATCHING
苏科版 九年级上册
第十一章 简单机械和功
一、杠杆
01
02
03
04
05
CONTENTS
杠杆原理的应用
什么是杠杆
探究杠杆平衡的条件
杠杆动态平衡分析
学习目标
1. 知道什么是杠杆及杠杆五要素;
2. 会画杠杆的力臂;
3. 理解杠杆的平衡条件及应用,
4. 根据杠杆平衡条件进行有关计算;
5. 会判断省力杠杆、等臂杠杆和费力杠杆;
6. 知道分析探究析杠杆平衡条件实验;
7. 根据杠杆五要素、杠杆平衡条件学会综合分析杠杆动态平衡问题。
重点难点
教学重点:
1.杠杆及杠杆的五要素;
2.杠杆平衡条件及其探究实验过程;
3.杠杆原理的应用(杠杆的分类)。
1.分析实际生活中复杂的杠杆模型,确定杠杆的五要素,并解决有关问题;
2.尝试解决探究杠杆平衡条件实验中所遇到的问题;
3.分析杠杆动态平衡问题;
4.杠杆在其他物理模块的应用,如压强与浮力。
教学难点:
在古代,人类就学会利用一些自然材料如石头、木头、兽骨、植物纤维等来制造工具。人们知道,单纯依靠自己肌肉产生的力量是有限的,制造一些工具可以产生更好的效果。杠杆就是这样的一类工具。你使用过杠杆类的工具吗?能说说它的作用吗?
开罐头
铁路维修
舂(chōng)米
情景引入
PART ONE
什么是杠杆
如图 (a)所示,用硬棒(可选择直尺或铅笔)和橡皮撬动课本,观察撬课本的过程;结合生活中的切纸刀[图 (b )]、开瓶器[图 (c)]、钓鱼竿[图 (d)]等工具,分析这些工具在使用时有什么共同的特点?
探究新知
木板上钉了一枚图钉,你能直接用手把它拔出来吗
活动11.1 拔图钉
做一做
议一议
你是怎样拔出图钉的 有哪些方法 哪一种方法更方便、省力
方法①:用螺丝刀撬出来;方法②:用羊角锤拔出来。
图钉很小,而且用手拔时需要用很大的力才行,所以直接用手很难把它直接拔出来。
请从图11-1中选择合适的工具把图钉拔出来。
选择羊角锤。
羊角锤能够方便地卡住图钉,使用时相当于一个省力杠杆,所以选择图中的羊角锤更方便、省力。
图11-1 拔图钉
1.定义:物理学中,将在力的作用下可绕一固定点转动的硬棒称为杠杆。
注意:
(1)“硬棒” 是指在力的作用不发生形变。
(2)杠杆可以是直的,也可以是弯曲的。如钓鱼竿、指甲剪、脚踏式翻盖垃圾桶。
O
l1
2.杠杆五要素:支点、动力、阻力、动力臂、阻力臂
(1)支点:杠杆绕着转动的点,即图中的点O。
(2)动力:使杠杆转动的力,即图中的 F 。
(3)阻力:阻碍杠杆转动的力,即图中 的 F 。
(4)动力臂:从支点到动力作用线(通过力的作用点沿力的方向所引的直线)的距离 ,即图中的l 。
(5)阻力臂:从支点到阻力作用线的距离,用l2表示。
l2
F1
F2
3. 力臂的画法
l2
l1
B
F2
O
F1
A
F2
B
O
A
F1
1. 找出支点的位置
3. 从支点作动力、阻力作用线的垂线
2. 确定动力、阻力作用线
4. 标垂足,定力臂
F1
F2
l1
l2
F1
F2
l1
O
l2
O
在杠杆的使用中,杠杆的平衡状态是一种非常重要的状态。
杠杆在满足什么条件时,才会平衡呢?
画出图中杠杆各力的力臂。
PART TWO
探究杠杆平衡的条件
学生实验:探究杠杆平衡的条件
信息快递:当杠杆在动力和阻力的作用下静止时,我们就说杠杆处于平衡状态。
1.安装杠杆,调节杠杆两端的平衡螺母,使之在水平位置平衡 。
实验与记录
2. 如图11-4所示,在杠杆左边挂一定数量的钩码,用弹簧测力计在杠杆右边某一位
置竖直拉住杠杆。设弹簧测力计对杠杆竖直向下的拉力F 是动力,动力臂为l ;钩码对杠杆的拉力F 是阻力,阻力臂为l 。
当杠杆在水平位置平衡时 ,测量F 、 l 、F 、l 的大小 , 并将数据记录在下表中 。
图11-4 探究杠杆的平衡条件
序号 F /N l /cm F /N l2/cm
①
②
③
④
3.在下列情况下使杠杆在水平位置平衡,将相关数据记录在上表中:
(1)保持钩码和弹簧测力计的位置不变,改变钩码的数量。
(2)保持钩码的数量和位置不变,改变弹簧测力计的位置。
(3)保持弹簧测力计的位置和钩码的数量不变,改变钩码的位置。
6
2.0
3.0
4
4
6
4.0
6.0
2.0
12
4
6.0
8
4.0
12
6.0
分析表中数据,找出它们之间的关系。你有什么发现
交流与小结
杠杆的平衡条件也称杠杆原理,是由古希腊学者阿基米德总结出来的。 为了说明杠杆原理的威力,他曾说过: “假如给我一个支点,我就能推动地球”(图11-5)。我国古人也对杠杆进行过深入研究,并将杠杆广泛应用于生产和生活中。
实验表明,杠杆平衡时
动力×动力臂=阻力×阻力臂
用字母表示可写成
F 1 =F l
图11-5 阿基米德想象用杠杆移动地球
1.使杠杆在水平位置平衡的原因是什么?
避免偶然性,得出普遍规律.
2.为什么要多次实验
实验反思:
一是可直接从杠杆上读出力臂的大小;二是消除杠杆自身重力对杠杆平衡的影响。
3.教材用杠杆一端挂钩码,另一端用弹簧测力计竖直向下拉的方法做实验。请分析说明用这种方法做实验的好处是什么?
用弹簧测力计竖直向下拉杠杆时,由于测力计的力可以连续变化,容易得到所需要的力,不需要调整力臂,所以这种方法很容易使杠杆平衡。
4.若采用杠杆两端都挂钩码的方法,探究杠杆平衡条件是否可行?
可行。
实验视频—杠杆两端挂钩码探究杠杆平衡条件
在我国,人们很早就开始运用杠杆解决生产、生活中的问题。
图11-6所示是在我国湖南长沙出土的战国时期的天平和砝码。该天平配有多个砝码,最小的砝码质量约为0.6g 。这说明当时的称量已经相当精确。
《墨经》中对秤的原理作了较为科学的描述。《墨经》将被称物品叫 作“重”,砝码叫作“权”,支点到“重”的距离叫作“本”,支点到 “权”的距离叫作“标”,如图11-7所示。
读一读 中国古人对杠杆的研究和应用
明代宋应星在《天工开物》中描绘了用于捣谷的碓(图11-8)和用于汲水的桔槔(图11-9)。
PART THREE
杠杆原理的应用
我们身边有很多杠杆。例如,跷跷板、羊角锤、船桨、各种剪刀,观察这些杠杆,它们的动力臂和阻力臂有什么关系?
观察思考
羊角锤
瓶盖起子
观察思考
钓鱼竿
1.省力杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。用较小的动力就可以克服较大的阻力。(l1>l2, F1
小于
(3)常见的省力杠杆:瓶盖起子、羊角锤、独轮车、钳子等。
省力杠杆的实例分析
F1
F2
o
o
F2
F1
剪刀相当于两个杠杆组合在一起
l2
l1
生活中的一些省力杠杆:
2.费力杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。动力作用点移动较小的距离就可以使阻力作用点移动较大的距离。(l1
大于
小于
(3)常见的费力杠杆:镊子、缝纫机脚踏板、钓鱼竿、筷子夹菜、皮划艇的桨、扫帚等。
费力杠杆的实例分析
o
F1
F2
F2
l1
l2
l2
l1
筷子相当于两个杠杆组合在一起。
人的右手与钓鱼竿接触处为支点。
o
F1
生活中的一些费力杠杆:
扫把
镊子
船桨
3.等臂杠杆
(1)示意图:如图所示
(2)特点:动力臂______阻力臂,平衡时动力______阻力。这样的杠杆既不省力也不费力。(L1=L2, F1=F2)
等于
等于
(3)常见的等臂杠杆:跷跷板、托盘天平。
生活中的等臂杠杆:
托盘天平
跷跷板
生活 物理 社会 生活中的剪刀
如图11-12所示,剪刀是生活中常见的工具,它也是一种杠杆。注意观察从事不同行业的人,所用的剪刀各有什么特点。
图11-12 常见的剪刀
裁缝用的剪刀刀刃比平常家用剪刀的刀刃长得多,完成一次剪裁动作可以裁剪较长的布料。
理发师用的剪刀手柄比较短,他们剪发时手的动作幅度较小, 可提高剪发的频率。
钣金工师傅剪铁皮用的剪刀,其动力臂比阻力臂长,只要用较小的力,就能把坚硬的金属片剪开。
园艺师使用的剪刀有很多种,如修整冬青树的剪刀、剪花枝的剪刀等。请你调查:园艺师使用了哪些剪刀 它们各有什么特点和用途
例题 据报道,一位物理老师在动物园内,用弹簧测力计称出了一头大象的质量。在称象过程中,他用到了吊车、铁笼和一根很长的槽钢等辅助工具, 如图11-13所示。槽钢上的悬吊点0为支点,测得动力臂l1 为 9m, 阻力臂l 为 7cm (图11-14)。槽钢在水平位置平衡时,弹簧测力计的示数为200 N。若 不计槽钢和铁笼的质量,试估算大象的质量(g 取10N/kg)。
图11-13 用杠杆称象
图11-14 称量原理示意
分析 称象过程运用了杠杆原理。若不计槽钢和铁笼的质量,则图 11-14中的F 与大象所受的重力G 大小相等。
解答 槽钢是一个杠杆,点O为支点,人通过弹簧测力计对杠杆A 端的拉力F =200 N 为动力,动力臂1 =9m; 杠杆B 端所受的拉力F 为阻力,阻力臂l =7cm=0.07m。
根据杠杆原理F l =Fl 可得
拉力F 与大象的重力G 大小相等,即F =G=mg, 所以大象的质量
反思 如果要考虑槽钢和铁笼的质量,那么在称象前应做什么准备工作
骨骼、肌肉和关节构成了人体的运动系统。尽管人体的各种运动 相当复杂,但最基本的运动都是由 骨骼绕关节转动产生的,其模型就 是杠杆。例如,当手握哑铃向上运动时(图11- 15),上臂中的肱二头肌收缩、肱三头肌伸展产生的力 使前臂骨骼绕肘关节转动。因此,前臂骨骼可以看成杠杆,肘关节是支点,哑铃对手的压力是阻力, 上臂中的肌肉对前臂骨骼施加的力则是动力。
人体有600多块肌肉,它们在神经系统的控制下,分别负责各 部位的运动。当你做抬腿、伸臂、点头、叩齿等动作时,就用到了身上各种各样的杠杆。
生活 物理 社会 从人体中的杠杆到空间站的机械臂
图11-15 举哑铃
人体中的杠杆为科技工作者的发明创造提供了很多启示,机械臂的 发明就是其生动体现。中国空间站的机械臂(图11-16)设置了多个关节, 通过这些关节的旋转,能够实现任意角度与位置的抓取等操作。它还能在空间站舱体外表面爬行,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查和大型设备维护等任务。
PART FOUR
杠杆动态平衡分析
情形1:如图,力F始终与杠杆垂直,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G 与 l 1=OA 保持不变,l 2 变大;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F变大;
情形2:如图,力F的方向保持水平向右,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G保持不变,l 2 变大,l 1变小;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F变大;
注意:此情况下杠杆不可能到达水平位置(当杠杆无限接近水平位置时,l 1无限接近于零,F无穷大)。
情形3:如图,力F的方向保持竖直向上,杠杆在力F的作用下绕O点匀速转动到水平位置的过程中,力F的大小如何变化?
分析:①F2=G保持不变,l 2 与l 1同时变大,且比值为0.5;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F=0.5G 保持不变。
情形4:如图,杠杆保持静止,力F的方向由竖直向上变为水平向右的过程中,力F的大小如何变化?
分析:①F2与l 2 保持不变,l 1先变大后变小;
②由杠杆平衡条件得:F = F2l 2/l 1;
③F先变小后变大(当F与杠杆垂直时F最小)。
A . 托盘天平 B .
钢丝钳
C . 开瓶扳手 D .
筷子
1 .如图所示是生活中几种常见的工具,其中可看作等臂杠杆的是 ( )
课堂练习
A
2.如图所示,用扳手拧螺帽时,图 (a/b)的握法更有利于拧紧螺帽,原因是动力臂更 (长/短)。
b
长
3.园艺师使用如图所示的剪刀修剪树枝时,为了更省力,应尽量让树枝 (靠近/远离)刀轴 O ,手握在刀柄的 (中间/末端)。使用此剪刀时 (省/ 费)距离。
靠近
末端
费
4.如图所示,人在用哑铃锻炼。将前臂从水平位置绕 O 点抬起哑铃,前臂此时相当于一个杠杆,其简化图如图乙所示。若哑铃重力为 50N,L1 = 5cm ,L2 = 20cm ,则拉力F1 = N。
200
5.如图所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态。若在 A 、B 两处再各加一个钩码,下列说法正确的是 ( )
A .杠杆右边向下倾 B .杠杆左边向下倾
C .杠杆仍平衡
D .无法确定杠杆是否平衡
A
6.如图,B 为杠杆 OA 的中点,在 B 点挂一个 20N 的重物,加在 A 点的动力使 OA 在水平位置保持静止(杠杆重力及摩擦均不计),则 ( )
A .该杠杆一定是省力杠杆
C .作用点在 A 点的最小动力等于 10N
B .该杠杆一定是费力杠杆
D .物体的重力就是杠杆所受的阻力
C
杠杆
课堂小结
杠杆的定义
杠杆的五要素
杠杆的平衡条件
杠杆动态平衡分析
杠杆原理的应用
省力杠杆
等臂杠杆
费力杠杆
什么是杠杆
杠杆平衡状态:在动力和阻力作用下静止
杠杆平衡的条件:动力×动力臂=阻力×阻力臂
动力、阻力
支点
动力臂、阻力臂
布置作业
1.指出图11-17中各个杠杆工作时的支点、动力、动力臂、阻力和阻力臂,并说明它们中哪些是省力杠杆,哪些是费力杠杆。
(a) 羊角锤
(b) 镊子
(c) 夹子
图11-17
(a) 对羊角锤而言,锤头和木板接触的部分是支点,钉子对锤施加的力是阻力,方向沿着钉子向下,支点到钉子施加的力的作用线的距离是阻力臂,手对锤柄的力是动力,支点到手施加的力的作用线的距离是动力 臂。因为它的动力臂比阻力臂长,所以是省力杠杆。
(b) 对镊子而言,支点在顶端,手对镊子向里的压力是动力,顶端到手指施加的力的作用线的距离是动力臂,所夹物品对镊子施加的力是阻力,方向向外,相应的阻力臂是顶端到物品施加的力的作用线的距离,动 力臂比阻力臂短,是费力杠杆。
(c) 对于夹子而言,夹子中间的交点处是支点,手对夹柄的压力是动力,支点到手指施加的力的作用线的距离是动力臂,使夹头向内的力是阻力,支点到使夹头向内的力的作用线的距离是阻力臂,动力臂比阻力臂长,是省力杠杆。
2. 如图所示,在“探究杠杆的平衡条件”实验中,保持杠杆水平平衡,改变弹簧测力计拉杠杆的方向,弹簧测力计的示数会改变吗 此时动力臂与支点到动力作用点的距离相等吗 试用杠杆平衡条件解释。
会改变;不相等;
解释:当保持杠杆在水平位置平衡时,如果保持弹簧测力计悬挂点不变,改变弹簧测力计拉杠杆的方向,杠杆仍然保持水平平衡。这种情况下,弹簧测力计的示数会变大,因为拉力方向倾斜后,力臂会变短,为了保持杠杆平衡,拉力需要增大 。
感谢观看
THANK YOU FOR WATCHING
同课章节目录