2025年安徽省芜湖二十七中中考物理三模试卷(含解析)
文档属性
| 名称 | 2025年安徽省芜湖二十七中中考物理三模试卷(含解析) |
|
|
| 格式 | docx | ||
| 文件大小 | 398.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2025-08-09 00:00:00 | ||
图片预览
文档简介
2025年安徽省芜湖二十七中中考物理三模试卷
一、单选题:本大题共7小题,共14分。
1.下列说法正确的是( )
A. 静止的列车惯性比高速行驶的汽车小
B. 飞机飞行时,机翼上方空气流速比下方大
C. 手机通过超声波实现远程无线控制智能家居
D. 光刻芯片时,激光照射升温是通过做功增加内能
2.如图所示,在竖直平面内用轻质细绳悬挂一个小球,将小球拉至A点,由静止开始释放,小球能达到的右侧最高点为B(α>β),则关于该过程,下列判断正确的是( )
A. 整个过程中,小球的机械能守恒
B. 小球从A点到B点的过程中,在C点时动能最大
C. 小球从A点到C点的过程中,小球的重力势能增大
D. 小球从C点到B点的过程中,小球动能减少量等于重力势能增加量
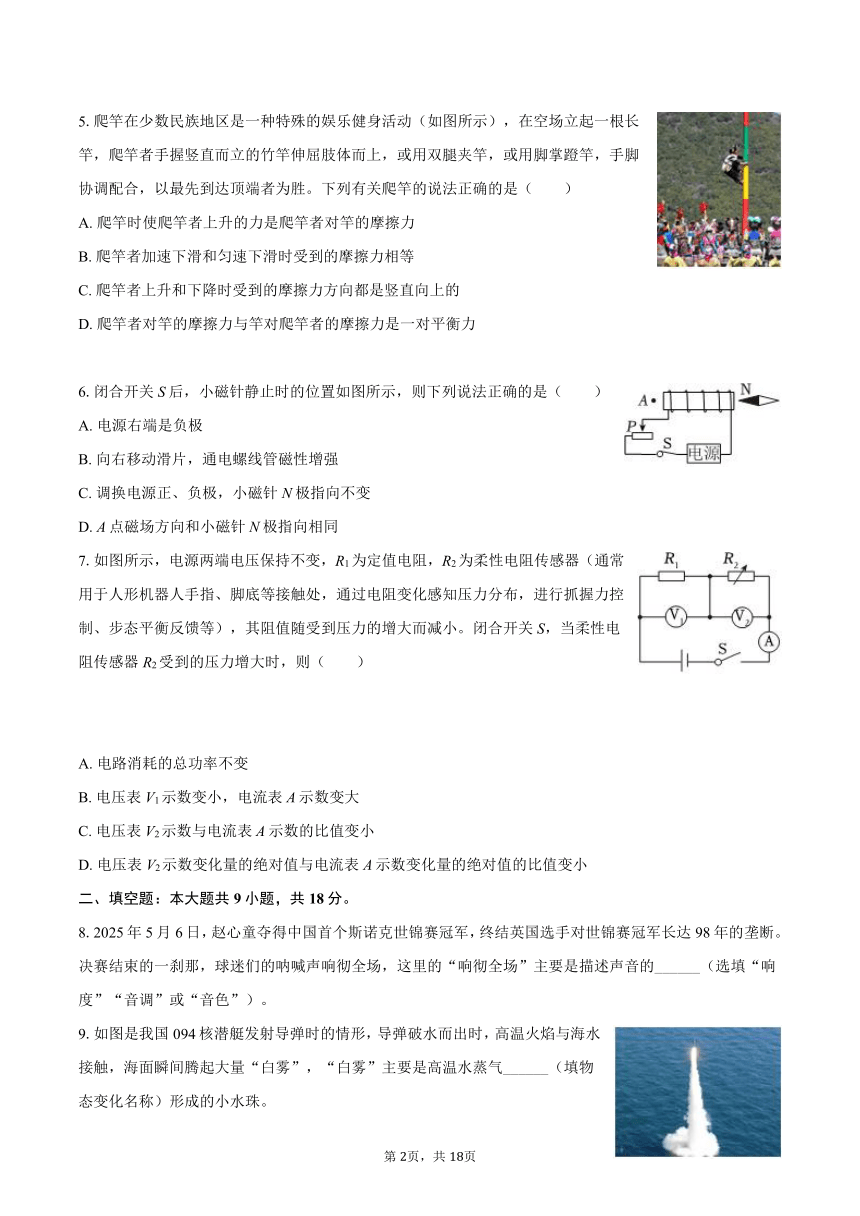
3.在图甲女孩前面适当距离放置玻璃杯,然后在玻璃杯中倒入水,会看到如图乙“女孩转身”的情形,则通过盛水的玻璃杯看到“女孩转身”是因为凸透镜成( )
A. 倒立的实像 B. 倒立的虚像 C. 正立的实像 D. 正立的虚像
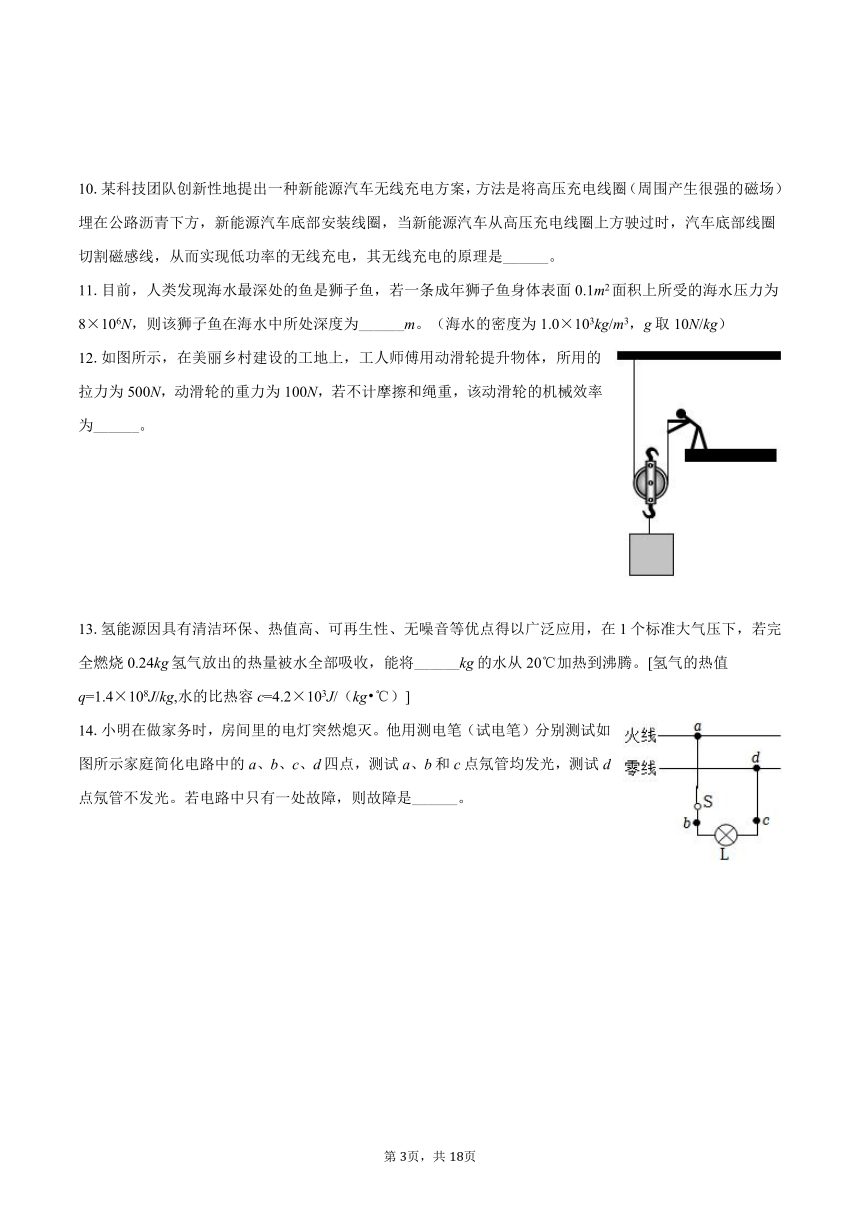
4.甲、乙两个物体同时同地向东做匀速直线运动,它们的s-t图像如图所示,下列说法错误的是( )
A. 甲的速度比乙大
B. 以甲为参照物,乙向东运动
C. 8s时甲、乙两个物体相距16m
D. 通过24m的路程甲比乙少用16s
5.爬竿在少数民族地区是一种特殊的娱乐健身活动(如图所示),在空场立起一根长竿,爬竿者手握竖直而立的竹竿伸屈肢体而上,或用双腿夹竿,或用脚掌蹬竿,手脚协调配合,以最先到达顶端者为胜。下列有关爬竿的说法正确的是( )
A. 爬竿时使爬竿者上升的力是爬竿者对竿的摩擦力
B. 爬竿者加速下滑和匀速下滑时受到的摩擦力相等
C. 爬竿者上升和下降时受到的摩擦力方向都是竖直向上的
D. 爬竿者对竿的摩擦力与竿对爬竿者的摩擦力是一对平衡力
6.闭合开关S后,小磁针静止时的位置如图所示,则下列说法正确的是( )
A. 电源右端是负极
B. 向右移动滑片,通电螺线管磁性增强
C. 调换电源正、负极,小磁针N极指向不变
D. A点磁场方向和小磁针N极指向相同
7.如图所示,电源两端电压保持不变,R1为定值电阻,R2为柔性电阻传感器(通常用于人形机器人手指、脚底等接触处,通过电阻变化感知压力分布,进行抓握力控制、步态平衡反馈等),其阻值随受到压力的增大而减小。闭合开关S,当柔性电阻传感器R2受到的压力增大时,则( )
A. 电路消耗的总功率不变
B. 电压表V1示数变小,电流表A示数变大
C. 电压表V2示数与电流表A示数的比值变小
D. 电压表V2示数变化量的绝对值与电流表A示数变化量的绝对值的比值变小
二、填空题:本大题共9小题,共18分。
8.2025年5月6日,赵心童夺得中国首个斯诺克世锦赛冠军,终结英国选手对世锦赛冠军长达98年的垄断。决赛结束的一刹那,球迷们的呐喊声响彻全场,这里的“响彻全场”主要是描述声音的______(选填“响度”“音调”或“音色”)。
9.如图是我国094核潜艇发射导弹时的情形,导弹破水而出时,高温火焰与海水接触,海面瞬间腾起大量“白雾”,“白雾”主要是高温水蒸气______(填物态变化名称)形成的小水珠。
10.某科技团队创新性地提出一种新能源汽车无线充电方案,方法是将高压充电线圈(周围产生很强的磁场)埋在公路沥青下方,新能源汽车底部安装线圈,当新能源汽车从高压充电线圈上方驶过时,汽车底部线圈切割磁感线,从而实现低功率的无线充电,其无线充电的原理是______。
11.目前,人类发现海水最深处的鱼是狮子鱼,若一条成年狮子鱼身体表面0.1m2面积上所受的海水压力为8×106N,则该狮子鱼在海水中所处深度为______m。(海水的密度为1.0×103kg/m3,g取10N/kg)
12.如图所示,在美丽乡村建设的工地上,工人师傅用动滑轮提升物体,所用的拉力为500N,动滑轮的重力为100N,若不计摩擦和绳重,该动滑轮的机械效率为______。
13.氢能源因具有清洁环保、热值高、可再生性、无噪音等优点得以广泛应用,在1个标准大气压下,若完全燃烧0.24kg氢气放出的热量被水全部吸收,能将______kg的水从20℃加热到沸腾。[氢气的热值q=1.4×108J/kg,水的比热容c=4.2×103J/(kg ℃)]
14.小明在做家务时,房间里的电灯突然熄灭。他用测电笔(试电笔)分别测试如图所示家庭简化电路中的a、b、c、d四点,测试a、b和c点氖管均发光,测试d点氖管不发光。若电路中只有一处故障,则故障是______。
15.如图甲所示,R1、R2为定值电阻,电源电压为3V,闭合开关,电压表示数为1V,现将R1、R2接入图乙电路,闭合开关,电流表示数为0.3A,则通过电阻R1的电流为______A。
16.许多汽车的后视镜配备了如图甲所示的加热装置,该装置有“低温”除雾和“高温”除霜功能,能保持镜面清晰,确保驾驶安全。其内部电路如图乙所示,电源电压保持不变,R1=12Ω,同时闭合开关S和S1,电路中电流为1.5A;再断开开关S1电路中电流变化了1A。则在“低温”除雾功能下工作0.5min电路产生的热量为______J。
三、作图题:本大题共1小题,共2分。
17.如图所示,一束单色光AO从空气斜射到玻璃三棱镜,折射光线为OB。光线OB又从三棱镜中斜射到与空气的分界面上的B点,请在图中画出光线OB的反射光线和折射光线。
四、实验探究题:本大题共3小题,共16分。
18.小军用实验室的托盘天平称量1枚硬币的质量,实验过程如下:
(1)调节横梁平衡:将天平放在水平桌面上,取下两侧的垫圈,指针开始摆动,稳定后,指针指在分度盘的位置如图甲所示。则接下来的调节过程:用镊子将游码移到标尺的零刻度线处,向______调节平衡螺母,使指针指在分度盘中央刻度线或在中央刻度线两侧等幅摆动。
(2)调节天平横梁平衡后,小军将10枚相同硬币置于左盘,在右盘增减砝码并移动游码,直至横梁再次平衡,此时右盘中的砝码情况和游码在标尺上的位置如图乙所示,则1枚硬币的质量为______g。
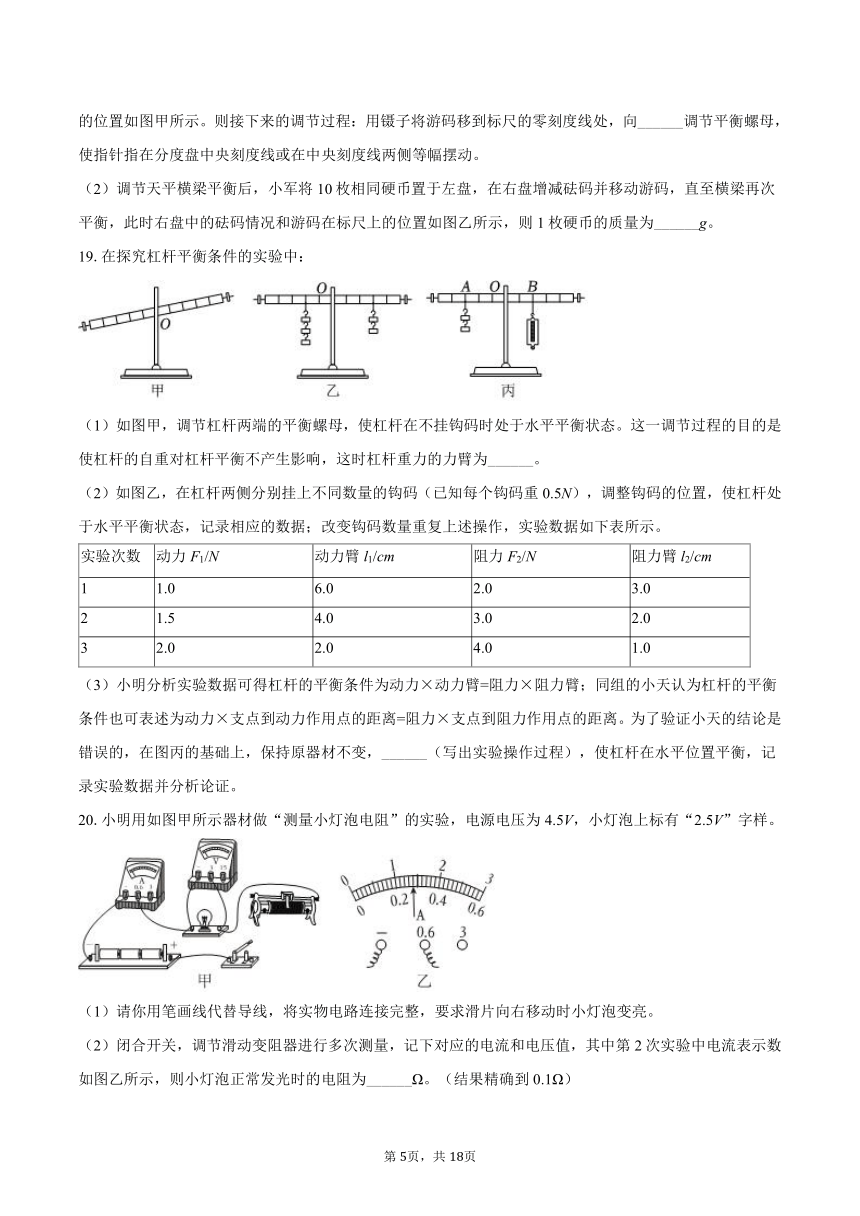
19.在探究杠杆平衡条件的实验中:
(1)如图甲,调节杠杆两端的平衡螺母,使杠杆在不挂钩码时处于水平平衡状态。这一调节过程的目的是使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为______。
(2)如图乙,在杠杆两侧分别挂上不同数量的钩码(已知每个钩码重0.5N),调整钩码的位置,使杠杆处于水平平衡状态,记录相应的数据;改变钩码数量重复上述操作,实验数据如下表所示。
实验次数 动力F1/N 动力臂l1/cm 阻力F2/N 阻力臂l2/cm
1 1.0 6.0 2.0 3.0
2 1.5 4.0 3.0 2.0
3 2.0 2.0 4.0 1.0
(3)小明分析实验数据可得杠杆的平衡条件为动力×动力臂=阻力×阻力臂;同组的小天认为杠杆的平衡条件也可表述为动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。为了验证小天的结论是错误的,在图丙的基础上,保持原器材不变,______(写出实验操作过程),使杠杆在水平位置平衡,记录实验数据并分析论证。
20.小明用如图甲所示器材做“测量小灯泡电阻”的实验,电源电压为4.5V,小灯泡上标有“2.5V”字样。
(1)请你用笔画线代替导线,将实物电路连接完整,要求滑片向右移动时小灯泡变亮。
(2)闭合开关,调节滑动变阻器进行多次测量,记下对应的电流和电压值,其中第2次实验中电流表示数如图乙所示,则小灯泡正常发光时的电阻为______Ω。(结果精确到0.1Ω)
实验次数 电压U/V 电流I/A 电阻R/Ω
1 2.0 0.26 7.7
2 2.5
3 3.0 0.30 10.0
(3)在某次向右移动滑片的过程中,小灯泡电阻变化量的绝对值、滑动变阻器接入电路阻值变化量的绝对值分别为ΔRL、ΔR,则ΔRL______ΔR(选填“>”“<”或“=”)。
(4)实验结束后,同组的小红想用该实验装置探究电流与电阻的关系,该装置是否可行并说明理由:______。
五、计算题:本大题共2小题,共13分。
21.近年来,低空经济迅猛发展。如图是山区果农利用无人机吊运水果的情景,若无人机在100s内提着重500N的水果匀速竖直上升了50m。求:
(1)无人机拉力对水果做的功;
(2)无人机拉力对水果做功的功率。
22.如图甲所示电路中,电源电压保持不变,R1、R2为定值电阻,R2=18Ω,滑动变阻器R的最大阻值为100Ω。开关S1闭合、S2断开,滑片从某一位置移动到另一位置过程中,滑动变阻器消耗的功率随电流表示数变化如图乙所示。求:
(1)当电流表示数为0.4A时,滑动变阻器两端的电压;
(2)电源电压和电阻R1的阻值;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电路消耗的总功率。
六、综合题:本大题共1小题,共7分。
23.小明用铝合金制作一个金属盒。刚放入水中时,金属盒漂浮在水面上,如图甲;一段时间后,金属盒底部渗漏进入一些水,但仍漂浮在水面上,如图乙;最后金属盒充满水沉底,如图丙。已知金属盒的质量为m,铝合金的密度为ρ,g为已知量。
(1)求图甲中金属盒受到的浮力;
(2)请推理说明:图乙和图甲中的水面高度相同;
(3)若m=300g,ρ=3.0×103kg/m3,,g取10N/kg,求图丙中金属盒受到的支持力。
1.【答案】
【解析】解:A、列车静止和高速行驶时,质量不变,惯性不变,故A错误;
B、飞机飞行时,机翼上方空气流速比下方大,故B正确;
C、手机通过电磁波实现远程无线控制智能家居,故C错误;
D、光刻芯片时,激光照射升温是通过热传递增加内能,故D错误。
故选:B。
(1)物体保持运动状态不变的性质叫惯性,惯性与物体的质量有关。
(2)飞机的机翼上凸下平,在流体中,流速越大的位置,压强小;飞机飞行时,机翼上方空气流速比下方大。
(3)手机是通过电磁波远程控制智能家居的。
(4)改变物体的内能方式有两种:做功和热传递。
本题考查的是改变物体内能的方式;知道惯性和流体的压强与流速的关系;知道电磁波的特点及应用。
2.【答案】
【解析】解:A、将小球拉至A点,由静止开始释放,小球能达到的右侧最高点为B,且α>β,说明受到阻力作用,摆动的幅度减小了,因而机械能不守恒,故A错误;
BC、动能与质量和速度有关,重力势能与质量和高度有关,小球从A点到B点的过程中,在C点时高度最小,重力势能最小,速度最大,动能最大,故B正确,C错误;
D、由于受阻力作用,机械能转化为内能,小球从C点到B点的过程中,小球动能减少量大于重力势能增加量,故D错误。
故选:B。
动能和势能合称机械能,由于克服空气阻力,一部分机械能会转化为内能;动能与质量和速度有关,重力势能与质量和高度有关。
本题考查机械能的转化与守恒,属于中档题。
3.【答案】
【解析】解:圆柱形玻璃杯盛满水,圆柱形玻璃杯中的水中间厚边缘薄,形成水凸透镜;该凸透镜能使图片横向颠倒;由图乙可知,此时的像与原图中的女孩相比,是等大的,左右颠倒的实像,故A正确,BCD错误。
故选:A。
透明物质可以制成中间厚边缘薄的凸透镜,物体置于凸透镜二倍焦距时,成倒立、等大的实像。
此题考查凸透镜成像的规律。掌握凸透镜成像的特点是解题关键。
4.【答案】
【解析】解:A、由图象可知,甲乙的s-t图象都是一条倾斜的直线,所以甲乙都做匀速直线运动,
由图象知两物体的速度:v甲===3m/s,v乙===1m/s,所以v甲>v乙,故A正确;
B、因为甲、乙两个物体同时同地向东做匀速直线运动,v甲>v乙,所以甲在乙物体的前面向东运动,两物体的相对位置不断变化,以甲物体为参照物,乙物体向西运动,故B错误;
C、由v=得,经过8s,甲运动的路程:s′甲=v甲t=3m/s×8s=24m,
由图像可知,经过8s,乙运动的路程:s′乙=8m,
所以8s时甲、乙两个物体相距:s′甲-s′乙=24m-8m=16m,故C正确;
D、由v=得,通过24m的路程甲所用的时间:t′甲===8s,
乙所用的时间:t′乙===24s,
甲比乙少用的时间为:t′乙-t′甲=24s-8s=16s,故D正确。
故选:B。
(1)匀速直线运动的路程s与运动时间t成正比,s-t图象是一条倾斜的直线,根据图象的形状判断甲、乙的运动性质,由图象找出甲乙的路程s与所对应的时间t,由速度公式可求出甲乙的速度,然后比较它们的大小关系;
(2)根据甲、乙的速度关系判断两物体的位置关系,然后以甲为参照物,判断乙的运动状态;
(3)根据v=的变形式可求出8s内甲运动的路程,由s-t图像可得出8s内乙运动的路程,进而可以得出两物体之间的距离;
(4)根据v=的变形式求出通过24m的路程甲、乙所用的时间,进而可以得出甲比乙少用的时间。
本题考查了速度公式的应用,从图中读取相关信息是解题的关键,难度不大。
5.【答案】
【解析】解:A、爬竿者依靠竿对其施加的向上的摩擦力上升,故A错误;
B、爬竿者受到重力和摩擦力,加速下滑时,重力大于摩擦力,匀速下滑时,重力等于摩擦力,所以加速下滑和匀速下滑时受到的摩擦力,大小不相等,故B错误;
C、爬竿者上升时,受到竖直向上的摩擦力和竖直向下的重力,下滑时,受到竖直向上的摩擦力和竖直向下的重力,故C正确;
D、只有匀速直线运动,爬竿者受到的摩擦力和重力是一对平衡力,故D错误。
故选:C。
(1)(4)根据力的作用是相互的分析;
(2)根据爬竿者的运动状态分析受力情况;
(3)从竖直方向受力平衡角度分析,当受力平衡时,二力大小相等、方向相反、作用在同一条直线上。
本题考查力与运动的关系,依托爬竿考查,理论联系实际。
6.【答案】
【解析】解:A、根据小磁针静止时的指向,利用磁极间“异名磁极相互吸引”的规律,可判断出通电螺线管靠近小磁针N极的一端为S极,另一端为N极。再根据安培定则,右手握住螺线管,大拇指指向N极,四指环绕的方向为电流方向,可判断出电流从电源的右端流出,左端流入,所以电源右端是正极,故A错误。
B、向右移动滑片,滑动变阻器接入电路的阻值增大,根据I=,在电源电压不变的情况下,电路中的电流减小。而电磁铁磁性强弱与电流大小、线圈匝数和有无铁芯有关,当线圈匝数和铁芯不变时,电流越小,磁性越弱,所以通电螺线管磁性减弱,故B错误。
C、调换电源正、负极,通电螺线管的磁极会发生改变,根据磁极间的相互作用,小磁针N极的指向会改变,故C错误。
D、在磁体外部,磁感线从N极出发回到S极,小磁针静止时,北极所指的方向与磁感线方向相同,所以A点的磁场方向和小磁针N极指向相同,故D正确。
故选:D。
知道小磁针的磁极,根据磁极间的相互作用,可判断出通电螺线管的磁极,再根据安培定则判断出电流的方向从而找到电源的正负极。
磁极间的相互作用规律:同名磁极相排斥,异名磁极相吸引。
电磁铁磁性强弱的影响因素:线圈匝数多少、电流大小。
本题考查了安培定则的应用,磁极间的相互作用,以及影响电磁铁磁性强弱的因素。
7.【答案】
【解析】解:A、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值减小,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变小,电流表A的示数变大,根据P=UI可知,总电压不变,总电流变大,总功率变大,故A错误;
B、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值减小,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变小,电流表A的示数变大。据U=IR知,定值电阻R1两端的电压变大,电压表V1的示数变大,故B错误;
C、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值增大,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变大,电流表A的示数变大。据U=IR知,定值电阻R1两端的电压变大,电压表V1的示数变大,总电压U不变,所以V2两端电压变小,电压表V2示数与电流表A示数的比值变小,故C正确;
D、电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值为定值电阻R1的大小,电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值不变,故D错误。
故选:C。
由电路图可知R1、R2串联,电压表V1测R1两端的电压,V2测R2两端的电压,电流表A测电路中的电流;闭合开关S,当柔性电阻传感器R2受到的压力增大时电路电阻的变化,根据欧姆定律可知电路中电流的变化和R1两端的电压变化,电压表V2的示数与电流表A的示数的比值的变化,以及电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值变化情况;根据P=UI可知电路消耗的总电功率的变化。
本题考查动态电路分析、电功率公式以及欧姆定律的应用,难度一般。
8.【答案】
【解析】解:这里的“响彻全场”主要是描述声音的响度,因为响度的大小与声音的振幅有关,振幅越大,响度越大,振幅越小,响度越小。
故答案为:响度。
物理学中把人耳能感觉到的声音的强弱称为响度,响度的大小与声音的振幅有关,振幅越大,响度越大,振幅越小,响度越小。
此题要结合声音的特征响度定义进行分析解答,注意与其它特征的区分。
9.【答案】
【解析】解:“白雾”主要是高温水蒸气液化(液化指物质由气态转变成液态)形成的小水珠。
故答案为:液化。
液化指物质由气态转变成液态。
本题考查了液化现象,属于基础题。
10.【答案】
【解析】解:将高压充电线圈(周围产生很强的磁场)埋在公路沥青下方,新能源汽车底部安装线圈,当新能源汽车从高压充电线圈上方驶过时,汽车底部线圈切割磁感线,会产生感应电流,从而实现低功率的无线充电,其无线充电的原理是电磁感应现象。
故答案为:感应电流。
闭合电路的部分导体,在磁场中做切割磁感线运动,导体中就会产生感应电流,这是电磁感应现象。
此题考查了电磁感应现象的应用,理解电磁感应现象的运用及产生感应电流的条件。
11.【答案】
【解析】解:该狮子鱼所受的海水的压强为:
p===8×107Pa,
该狮子鱼在海水中所处深度为:
h===8×103m。
故答案为:8×103。
根据p=求出该狮子鱼所受的海水的压强,再根据p=ρgh求出该狮子鱼在海水中所处深度。
本题主要考查的是压强的定义是和液体压强公式的应用,难度不大。
12.【答案】
【解析】解:动滑轮绳子股数为2,若不计摩擦和绳重,根据F=(G+G动)可知,物重为:
G=nF-G动=2×500N-100N=900N,
则该动滑轮的机械效率为:
η=====×100%=90%。
故答案为:90%。
动滑轮绳子股数为2,若不计摩擦和绳重,根据F=(G+G动)求出物重,利用η====求出该动滑轮的机械效率。
本题主要考查的是滑轮组的机械效率,关键是会根据题目的条件进行简单的计算。
13.【答案】
【解析】解:0.24kg氢气完全燃烧放出的热量:
Q放=qm=1.4×108J/kg×0.24kg=3.36×107J;水吸收的热量Q吸=Q放=3.36×107J,
由Q吸=cmΔt知,水的质量为:
m′===100kg。
故答案为:100。
已知天然气的体积和热值,可求产生的热量,产生的热量被水吸收,知道水的比热容、水的初温和末温,利用吸热公式Q=cmΔt求水的质量。
本题考查了学生对吸热公式Q吸=cmΔt、燃料完全燃烧放热公式Q放=mq的掌握和运用,难度不大。
14.【答案】
【解析】解:用测电笔分别测试如图所示家庭简化电路中的a、b、c、d四点,测试a、b和c点氖管均发光,说明a、b、c三个点与火线是连通的,测试d点氖管不发光,d点与零线是连通的,可能是cd之间是断开的。
故答案为:c、d之间断路。
测电笔是辨别火线和零线的工具,正常使用时,接触火线氖管发光,接触零线,氖管不发光。
本题考查的是测电笔的使用方法,会判断简单的电路故障。
15.【答案】
【解析】解:如图甲所示,R1、R2为串联关系,电压表测量R1的电压;
根据串联分压规律,R1:R2=U1:U2=1V:(3V-1V)=1:2;
将R1、R2接入图乙电路,两个电阻并联,电流表测量干路电流,
根据并联电流之比等于电阻倒数的比,故I1:I2=R2:R1=2:1;
根据干路电流等于各支路电流之和,则I1+I2=0.3A;
解得通过电阻R1的电流I1=0.2A。
故答案为:0.2。
根据串联分压规律计算两个电阻的比值,根据并联分流规律计算电流的比值,结合干路电流等于各支路电流之和计算通过电阻R1的电流。
本题考查动态电路与欧姆定律以及串并联的特点,属于中档题。
16.【答案】
【解析】解:由图乙可知,同时闭合开关S和S1,R1与R2并联;再断开开关S1,电路为R2的简单电路,
由于并联电路的各支路互不影响,所以通过R2的电流不变,
通过R1的电流等于电流的变化量,即I1=ΔI=1A,
根据并联电路的电流规律可得,通过R2的电流:I2=I-I1=1.5A-1A=0.5A,
电源电压不变,根据P=UI可知,R1与R2并联时电路消耗的功率较大,装置处于高温挡;
电路中只有R2工作时,电路消耗的功率较小,装置处于低温挡;
并联电路各支路两端的电压相等,由欧姆定律可得R2两端的电压:
U2=U1=I1R1=1A×12Ω=12V,
则在“低温”除雾功能下工作0.5min电路产生的热量:
Q=R2t=U2I2t=12V×0.5A×0.5×60s=180J。
故答案为:180。
由图乙可知,同时闭合开关S和S1,R1与R2并联;再断开开关S1,电路中只有R2工作,根据并联电路的特点可知通过R1的电流,根据并联电路的电流规律可得通过R2的电流,根据P=UI可知判断装置的工作挡位,根据欧姆定律可得R2两端的电压,根据Q=I2Rt=UIt求在“低温”除雾功能下工作0.5min电路产生的热量。
本题考查并联电路的特点和欧姆定律、焦耳定律的应用,难度一般。
17.【答案】
【解析】解:图中法线已经画出,根据反射角等于入射角画出光线OB的反射光线,光从玻璃斜射入空气中时,折射角大于入射角,据此画出光线OB的折射光线,如图所示:
根据反射角等于入射角画出反射光线,根据折射规律画出折射光线。
本题考查光的反射定律与折射规律的应用,属于中档题。
18.【答案】
【解析】(1)如甲图所示,用镊子将游码归零,指针将偏向左侧,再向右调节平衡螺母,直至指针指示在分度盘中间;
(2)天平的分度值为0.2g,则游码对应的刻度值为0.2g;砝码的质量为60g,所以10枚硬币的质量为60g+0.2g=60.2g,则1枚硬币的质量为g=6.02g。
故答案为:(1)右;(2)6.02。
(1)首先把天平放在水平桌面上,把游码归零,再调节平衡螺母直到横梁平衡;
(2)物体的质量等于砝码质量与游码对应刻度值之和。
本题考查天平的使用以及累积法测物体的质量,难度不大。
19.【答案】
【解析】(1)因为杠杆的重心在支点上,所以力臂为零;
(3)根据杠杆的平衡条件,动力×动力臂=阻力×阻力臂,为验证:”动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离“是错误的,只有当动力臂不等于支点到动力作用点的距离时,看实验结论是否成立,所以在图丙的基础上,保持原器材不变,改变弹簧测力计拉力的方向。
故答案为:(1)0;(3)改变弹簧测力计拉力的方向。
(1)调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态,这时杠杆的重心在支点上;
(3)只有力的方向与杠杆垂直时,支点到动力作用点的距离等于力臂的大小,若力的方向与杠杆不垂直时,则支点到动力作用点的距离不等于力臂的大小,据此分析。
本题研究杠杆平衡条件,考查器材调试,对力臂的理解及根据杠杆平衡条件的运用,难度适中。
20.【答案】
【解析】(1)要求滑片向右移动时小灯泡变亮,电路的电流变大电阻变小,故变阻器右接线柱连入电路中,如下所示:
(2)闭合开关,调节滑动变阻器进行多次测量,记下对应的电流和电压值,其中第2次实验中电流表示数如图乙所示,分度值为0.02A,电流为0.28A,则小灯泡正常发光时的电阻为
R=≈8.9Ω
(3)由于小灯泡的灯丝电阻随温度变化而变化,当电压变化时,电流变化,温度变化,电阻变化;设灯泡两端电压为U1,U2,对应的电流为I1,I2,则
RL1=
RL2=
ΔRL=|-|
对于滑动变阻器,设其两端电压为U滑1,U滑2,对应的电流为I1,I2,则
R滑1=
R滑2=
ΔR=|-|
由于串联电路电压关系:U=UL+U滑,当电源电压不变时ΔUL=-ΔU滑,根据I=知ΔRL和ΔR的大小关系取决于电压和电流的变化关系;一般情况下,小灯泡电阻变化主要是因为温度对灯丝电阻的影响,而滑动变阻器电阻变化是因为接入电路的长度变化。在串联电路中,电流相同,当小灯泡电压变化时,滑动变阻器电压反向变化,但是由于小灯泡电阻变化时非线性的(因为温度对电阻影响较大),而滑动变阻器电阻变化时线性的(与接入长度成正比),所以ΔRL<ΔR;
(4)实验结束后,同组的小红想用该实验装置探究电流与电阻的关系,要控制电阻的电压不变,实验中要用不同的定值电阻,灯的电阻不是一个定值,且电阻未知,该装置是不可行。
故答案为:(1)见解析中的图;(2)8.9;(3)<;(4)不可行,灯的电阻不是一个定值,且电阻未知。
(1)滑片向右移动时小灯泡变亮,可知电路的电流变大电阻变小,确定变阻器右接线柱连入电路中;
(2)根据电流表分度值读数,由欧姆定律得出小灯泡正常发光时的电阻;
(3)因电源电压不变,根据欧姆定律先判断出两种情况下总电阻的变化,再根据灯的电阻随温度的减小而减小和串联电阻的规律分析回答;
(4)探究电流与电阻的关系要控制电压不变,改变定值电阻的大小。
本题“测量小灯泡电阻”的实验,考查电路连接、操作过程、欧姆定律的定律及对实验方案的评估。
21.【答案】
【解析】(1)若无人机在100s内提着重500N的水果匀速竖直上升了50m,拉力和重力是平衡力,由二力平衡可知,无人机对水果的拉力F=G=500N,
拉力对水果做的功W=Fh=Gh=500N×50m=25000J;
(2)拉力对水果做功的功率。
答:(1)无人机拉力对水果做的功是25000J;
(2)无人机拉力对水果做功的功率是250W。
(1)无人机做匀速直线运动,拉力和重力是平衡力,大小相等,根据W=Fh得到无人机拉力对水果做的功;
(2)根据P=得到无人机拉力对水果做功的功率。
本题考查功和功率的计算,需要知道功和功率的公式。
22.【答案】
【解析】(1)开关S1闭合、S2断开时,R1与滑动变阻器R串联,电流表测电路中的电流,电压表测变阻器两端的电压;
当电流表示数为I1=0.4A时,由图乙可知,此时滑动变阻器的功率P=5.6W,
由P=UI可得滑动变阻器两端的电压为:UR===14V;
(2)当电流表示数为0.4A时,由串联电路的电压特点和欧姆定律可得电源电压:U=UR+I1R1=14V+0.4A×R1---①,
当电流表示数为I2=1.1A时,由图乙可知,此时滑动变阻器消耗的功率P′=7.7W,
由P=UI可得此时滑动变阻器两端的电压:UR′===7V,
同理可得电源电压:U=UR′+I2R1=7V+1.1A×R1---②,
联立①②解得:U=18V,R1=10Ω;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电阻R1与R2并联,
此时电路消耗的总功率:
。
答:(1)滑动变阻器两端的电压为14V;
(2)电源电压为18V,电阻R1的阻值为10Ω;
(3)电路消耗的总功率为50.4W。
(1)开关S1闭合、S2断开时,R1与滑动变阻器R串联,电流表测电路中的电流,电压表测变阻器两端的电压;
当电流为0.4A时,从乙图中找到对应的滑动变阻器的功率,根据P=UI求出滑动变阻器两端的电压;
(2)当电流表示数为0.4A时,根据串联电路的电压特点和欧姆定律表示出电源电压;
当电流表示数为1.1A时,先根据P=UI求出此时滑动变阻器两端的电压,再根据串联电路的电压特点和欧姆定律表示出电源电压,联立方程组,解出电源电压和R1的阻值;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电阻R1与R2并联,根据公式P=求出R1、R2的功率,两者相加即为电路消耗的总功率。
本题考查了欧姆定律的应用电功率的计算,关键是根据图像中的信息利用电源电压不变建立方程组。
23.【答案】
【解析】(1)甲图中金属盒漂浮,根据漂浮时浮力等于重力,故F浮=G=mg;
(2)图乙中,设进入金属盒中水的体积为V水,则金属盒增大的重力ΔG=ρ水gV水
金属盒增大的浮力ΔF浮=ρ水gΔV排;根据漂浮时浮力等于重力
故增大的浮力等于增大的重力,即ΔF浮=ΔG=ρ水gΔV排=ρ水gV水,ΔV排=V水,即增大的排开液体的体积与进入的水体积相等,所以题图乙和题图甲中的水面高度相同;
(3)题图丙中金属盒沉底后受到重力、浮力和支持力的作用,根据力的平衡可知,金属盒受到的支持力F=G-F浮=mg-ρ水g=0.3kg×10N/kg-1.0×103kg/m3×10N/kg×=2N。
答:(1)图甲中金属盒受到的浮力是mg;
(2)见解答;
(3)图丙中金属盒受到的支持力是2N。
(1)根据漂浮时浮力等于重力计算;
(2)根据漂浮时浮力等于重力,增大的浮力计算增大的排开液体的体积与进入的水体积比较分析;
(3)根据金属盒受力平衡,结合压力等于浮力减去重力计算。
本题考查浮沉条件与阿基米德原理以及密度和重力公式的应用,属于中档题。
第1页,共1页
一、单选题:本大题共7小题,共14分。
1.下列说法正确的是( )
A. 静止的列车惯性比高速行驶的汽车小
B. 飞机飞行时,机翼上方空气流速比下方大
C. 手机通过超声波实现远程无线控制智能家居
D. 光刻芯片时,激光照射升温是通过做功增加内能
2.如图所示,在竖直平面内用轻质细绳悬挂一个小球,将小球拉至A点,由静止开始释放,小球能达到的右侧最高点为B(α>β),则关于该过程,下列判断正确的是( )
A. 整个过程中,小球的机械能守恒
B. 小球从A点到B点的过程中,在C点时动能最大
C. 小球从A点到C点的过程中,小球的重力势能增大
D. 小球从C点到B点的过程中,小球动能减少量等于重力势能增加量
3.在图甲女孩前面适当距离放置玻璃杯,然后在玻璃杯中倒入水,会看到如图乙“女孩转身”的情形,则通过盛水的玻璃杯看到“女孩转身”是因为凸透镜成( )
A. 倒立的实像 B. 倒立的虚像 C. 正立的实像 D. 正立的虚像
4.甲、乙两个物体同时同地向东做匀速直线运动,它们的s-t图像如图所示,下列说法错误的是( )
A. 甲的速度比乙大
B. 以甲为参照物,乙向东运动
C. 8s时甲、乙两个物体相距16m
D. 通过24m的路程甲比乙少用16s
5.爬竿在少数民族地区是一种特殊的娱乐健身活动(如图所示),在空场立起一根长竿,爬竿者手握竖直而立的竹竿伸屈肢体而上,或用双腿夹竿,或用脚掌蹬竿,手脚协调配合,以最先到达顶端者为胜。下列有关爬竿的说法正确的是( )
A. 爬竿时使爬竿者上升的力是爬竿者对竿的摩擦力
B. 爬竿者加速下滑和匀速下滑时受到的摩擦力相等
C. 爬竿者上升和下降时受到的摩擦力方向都是竖直向上的
D. 爬竿者对竿的摩擦力与竿对爬竿者的摩擦力是一对平衡力
6.闭合开关S后,小磁针静止时的位置如图所示,则下列说法正确的是( )
A. 电源右端是负极
B. 向右移动滑片,通电螺线管磁性增强
C. 调换电源正、负极,小磁针N极指向不变
D. A点磁场方向和小磁针N极指向相同
7.如图所示,电源两端电压保持不变,R1为定值电阻,R2为柔性电阻传感器(通常用于人形机器人手指、脚底等接触处,通过电阻变化感知压力分布,进行抓握力控制、步态平衡反馈等),其阻值随受到压力的增大而减小。闭合开关S,当柔性电阻传感器R2受到的压力增大时,则( )
A. 电路消耗的总功率不变
B. 电压表V1示数变小,电流表A示数变大
C. 电压表V2示数与电流表A示数的比值变小
D. 电压表V2示数变化量的绝对值与电流表A示数变化量的绝对值的比值变小
二、填空题:本大题共9小题,共18分。
8.2025年5月6日,赵心童夺得中国首个斯诺克世锦赛冠军,终结英国选手对世锦赛冠军长达98年的垄断。决赛结束的一刹那,球迷们的呐喊声响彻全场,这里的“响彻全场”主要是描述声音的______(选填“响度”“音调”或“音色”)。
9.如图是我国094核潜艇发射导弹时的情形,导弹破水而出时,高温火焰与海水接触,海面瞬间腾起大量“白雾”,“白雾”主要是高温水蒸气______(填物态变化名称)形成的小水珠。
10.某科技团队创新性地提出一种新能源汽车无线充电方案,方法是将高压充电线圈(周围产生很强的磁场)埋在公路沥青下方,新能源汽车底部安装线圈,当新能源汽车从高压充电线圈上方驶过时,汽车底部线圈切割磁感线,从而实现低功率的无线充电,其无线充电的原理是______。
11.目前,人类发现海水最深处的鱼是狮子鱼,若一条成年狮子鱼身体表面0.1m2面积上所受的海水压力为8×106N,则该狮子鱼在海水中所处深度为______m。(海水的密度为1.0×103kg/m3,g取10N/kg)
12.如图所示,在美丽乡村建设的工地上,工人师傅用动滑轮提升物体,所用的拉力为500N,动滑轮的重力为100N,若不计摩擦和绳重,该动滑轮的机械效率为______。
13.氢能源因具有清洁环保、热值高、可再生性、无噪音等优点得以广泛应用,在1个标准大气压下,若完全燃烧0.24kg氢气放出的热量被水全部吸收,能将______kg的水从20℃加热到沸腾。[氢气的热值q=1.4×108J/kg,水的比热容c=4.2×103J/(kg ℃)]
14.小明在做家务时,房间里的电灯突然熄灭。他用测电笔(试电笔)分别测试如图所示家庭简化电路中的a、b、c、d四点,测试a、b和c点氖管均发光,测试d点氖管不发光。若电路中只有一处故障,则故障是______。
15.如图甲所示,R1、R2为定值电阻,电源电压为3V,闭合开关,电压表示数为1V,现将R1、R2接入图乙电路,闭合开关,电流表示数为0.3A,则通过电阻R1的电流为______A。
16.许多汽车的后视镜配备了如图甲所示的加热装置,该装置有“低温”除雾和“高温”除霜功能,能保持镜面清晰,确保驾驶安全。其内部电路如图乙所示,电源电压保持不变,R1=12Ω,同时闭合开关S和S1,电路中电流为1.5A;再断开开关S1电路中电流变化了1A。则在“低温”除雾功能下工作0.5min电路产生的热量为______J。
三、作图题:本大题共1小题,共2分。
17.如图所示,一束单色光AO从空气斜射到玻璃三棱镜,折射光线为OB。光线OB又从三棱镜中斜射到与空气的分界面上的B点,请在图中画出光线OB的反射光线和折射光线。
四、实验探究题:本大题共3小题,共16分。
18.小军用实验室的托盘天平称量1枚硬币的质量,实验过程如下:
(1)调节横梁平衡:将天平放在水平桌面上,取下两侧的垫圈,指针开始摆动,稳定后,指针指在分度盘的位置如图甲所示。则接下来的调节过程:用镊子将游码移到标尺的零刻度线处,向______调节平衡螺母,使指针指在分度盘中央刻度线或在中央刻度线两侧等幅摆动。
(2)调节天平横梁平衡后,小军将10枚相同硬币置于左盘,在右盘增减砝码并移动游码,直至横梁再次平衡,此时右盘中的砝码情况和游码在标尺上的位置如图乙所示,则1枚硬币的质量为______g。
19.在探究杠杆平衡条件的实验中:
(1)如图甲,调节杠杆两端的平衡螺母,使杠杆在不挂钩码时处于水平平衡状态。这一调节过程的目的是使杠杆的自重对杠杆平衡不产生影响,这时杠杆重力的力臂为______。
(2)如图乙,在杠杆两侧分别挂上不同数量的钩码(已知每个钩码重0.5N),调整钩码的位置,使杠杆处于水平平衡状态,记录相应的数据;改变钩码数量重复上述操作,实验数据如下表所示。
实验次数 动力F1/N 动力臂l1/cm 阻力F2/N 阻力臂l2/cm
1 1.0 6.0 2.0 3.0
2 1.5 4.0 3.0 2.0
3 2.0 2.0 4.0 1.0
(3)小明分析实验数据可得杠杆的平衡条件为动力×动力臂=阻力×阻力臂;同组的小天认为杠杆的平衡条件也可表述为动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离。为了验证小天的结论是错误的,在图丙的基础上,保持原器材不变,______(写出实验操作过程),使杠杆在水平位置平衡,记录实验数据并分析论证。
20.小明用如图甲所示器材做“测量小灯泡电阻”的实验,电源电压为4.5V,小灯泡上标有“2.5V”字样。
(1)请你用笔画线代替导线,将实物电路连接完整,要求滑片向右移动时小灯泡变亮。
(2)闭合开关,调节滑动变阻器进行多次测量,记下对应的电流和电压值,其中第2次实验中电流表示数如图乙所示,则小灯泡正常发光时的电阻为______Ω。(结果精确到0.1Ω)
实验次数 电压U/V 电流I/A 电阻R/Ω
1 2.0 0.26 7.7
2 2.5
3 3.0 0.30 10.0
(3)在某次向右移动滑片的过程中,小灯泡电阻变化量的绝对值、滑动变阻器接入电路阻值变化量的绝对值分别为ΔRL、ΔR,则ΔRL______ΔR(选填“>”“<”或“=”)。
(4)实验结束后,同组的小红想用该实验装置探究电流与电阻的关系,该装置是否可行并说明理由:______。
五、计算题:本大题共2小题,共13分。
21.近年来,低空经济迅猛发展。如图是山区果农利用无人机吊运水果的情景,若无人机在100s内提着重500N的水果匀速竖直上升了50m。求:
(1)无人机拉力对水果做的功;
(2)无人机拉力对水果做功的功率。
22.如图甲所示电路中,电源电压保持不变,R1、R2为定值电阻,R2=18Ω,滑动变阻器R的最大阻值为100Ω。开关S1闭合、S2断开,滑片从某一位置移动到另一位置过程中,滑动变阻器消耗的功率随电流表示数变化如图乙所示。求:
(1)当电流表示数为0.4A时,滑动变阻器两端的电压;
(2)电源电压和电阻R1的阻值;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电路消耗的总功率。
六、综合题:本大题共1小题,共7分。
23.小明用铝合金制作一个金属盒。刚放入水中时,金属盒漂浮在水面上,如图甲;一段时间后,金属盒底部渗漏进入一些水,但仍漂浮在水面上,如图乙;最后金属盒充满水沉底,如图丙。已知金属盒的质量为m,铝合金的密度为ρ,g为已知量。
(1)求图甲中金属盒受到的浮力;
(2)请推理说明:图乙和图甲中的水面高度相同;
(3)若m=300g,ρ=3.0×103kg/m3,,g取10N/kg,求图丙中金属盒受到的支持力。
1.【答案】
【解析】解:A、列车静止和高速行驶时,质量不变,惯性不变,故A错误;
B、飞机飞行时,机翼上方空气流速比下方大,故B正确;
C、手机通过电磁波实现远程无线控制智能家居,故C错误;
D、光刻芯片时,激光照射升温是通过热传递增加内能,故D错误。
故选:B。
(1)物体保持运动状态不变的性质叫惯性,惯性与物体的质量有关。
(2)飞机的机翼上凸下平,在流体中,流速越大的位置,压强小;飞机飞行时,机翼上方空气流速比下方大。
(3)手机是通过电磁波远程控制智能家居的。
(4)改变物体的内能方式有两种:做功和热传递。
本题考查的是改变物体内能的方式;知道惯性和流体的压强与流速的关系;知道电磁波的特点及应用。
2.【答案】
【解析】解:A、将小球拉至A点,由静止开始释放,小球能达到的右侧最高点为B,且α>β,说明受到阻力作用,摆动的幅度减小了,因而机械能不守恒,故A错误;
BC、动能与质量和速度有关,重力势能与质量和高度有关,小球从A点到B点的过程中,在C点时高度最小,重力势能最小,速度最大,动能最大,故B正确,C错误;
D、由于受阻力作用,机械能转化为内能,小球从C点到B点的过程中,小球动能减少量大于重力势能增加量,故D错误。
故选:B。
动能和势能合称机械能,由于克服空气阻力,一部分机械能会转化为内能;动能与质量和速度有关,重力势能与质量和高度有关。
本题考查机械能的转化与守恒,属于中档题。
3.【答案】
【解析】解:圆柱形玻璃杯盛满水,圆柱形玻璃杯中的水中间厚边缘薄,形成水凸透镜;该凸透镜能使图片横向颠倒;由图乙可知,此时的像与原图中的女孩相比,是等大的,左右颠倒的实像,故A正确,BCD错误。
故选:A。
透明物质可以制成中间厚边缘薄的凸透镜,物体置于凸透镜二倍焦距时,成倒立、等大的实像。
此题考查凸透镜成像的规律。掌握凸透镜成像的特点是解题关键。
4.【答案】
【解析】解:A、由图象可知,甲乙的s-t图象都是一条倾斜的直线,所以甲乙都做匀速直线运动,
由图象知两物体的速度:v甲===3m/s,v乙===1m/s,所以v甲>v乙,故A正确;
B、因为甲、乙两个物体同时同地向东做匀速直线运动,v甲>v乙,所以甲在乙物体的前面向东运动,两物体的相对位置不断变化,以甲物体为参照物,乙物体向西运动,故B错误;
C、由v=得,经过8s,甲运动的路程:s′甲=v甲t=3m/s×8s=24m,
由图像可知,经过8s,乙运动的路程:s′乙=8m,
所以8s时甲、乙两个物体相距:s′甲-s′乙=24m-8m=16m,故C正确;
D、由v=得,通过24m的路程甲所用的时间:t′甲===8s,
乙所用的时间:t′乙===24s,
甲比乙少用的时间为:t′乙-t′甲=24s-8s=16s,故D正确。
故选:B。
(1)匀速直线运动的路程s与运动时间t成正比,s-t图象是一条倾斜的直线,根据图象的形状判断甲、乙的运动性质,由图象找出甲乙的路程s与所对应的时间t,由速度公式可求出甲乙的速度,然后比较它们的大小关系;
(2)根据甲、乙的速度关系判断两物体的位置关系,然后以甲为参照物,判断乙的运动状态;
(3)根据v=的变形式可求出8s内甲运动的路程,由s-t图像可得出8s内乙运动的路程,进而可以得出两物体之间的距离;
(4)根据v=的变形式求出通过24m的路程甲、乙所用的时间,进而可以得出甲比乙少用的时间。
本题考查了速度公式的应用,从图中读取相关信息是解题的关键,难度不大。
5.【答案】
【解析】解:A、爬竿者依靠竿对其施加的向上的摩擦力上升,故A错误;
B、爬竿者受到重力和摩擦力,加速下滑时,重力大于摩擦力,匀速下滑时,重力等于摩擦力,所以加速下滑和匀速下滑时受到的摩擦力,大小不相等,故B错误;
C、爬竿者上升时,受到竖直向上的摩擦力和竖直向下的重力,下滑时,受到竖直向上的摩擦力和竖直向下的重力,故C正确;
D、只有匀速直线运动,爬竿者受到的摩擦力和重力是一对平衡力,故D错误。
故选:C。
(1)(4)根据力的作用是相互的分析;
(2)根据爬竿者的运动状态分析受力情况;
(3)从竖直方向受力平衡角度分析,当受力平衡时,二力大小相等、方向相反、作用在同一条直线上。
本题考查力与运动的关系,依托爬竿考查,理论联系实际。
6.【答案】
【解析】解:A、根据小磁针静止时的指向,利用磁极间“异名磁极相互吸引”的规律,可判断出通电螺线管靠近小磁针N极的一端为S极,另一端为N极。再根据安培定则,右手握住螺线管,大拇指指向N极,四指环绕的方向为电流方向,可判断出电流从电源的右端流出,左端流入,所以电源右端是正极,故A错误。
B、向右移动滑片,滑动变阻器接入电路的阻值增大,根据I=,在电源电压不变的情况下,电路中的电流减小。而电磁铁磁性强弱与电流大小、线圈匝数和有无铁芯有关,当线圈匝数和铁芯不变时,电流越小,磁性越弱,所以通电螺线管磁性减弱,故B错误。
C、调换电源正、负极,通电螺线管的磁极会发生改变,根据磁极间的相互作用,小磁针N极的指向会改变,故C错误。
D、在磁体外部,磁感线从N极出发回到S极,小磁针静止时,北极所指的方向与磁感线方向相同,所以A点的磁场方向和小磁针N极指向相同,故D正确。
故选:D。
知道小磁针的磁极,根据磁极间的相互作用,可判断出通电螺线管的磁极,再根据安培定则判断出电流的方向从而找到电源的正负极。
磁极间的相互作用规律:同名磁极相排斥,异名磁极相吸引。
电磁铁磁性强弱的影响因素:线圈匝数多少、电流大小。
本题考查了安培定则的应用,磁极间的相互作用,以及影响电磁铁磁性强弱的因素。
7.【答案】
【解析】解:A、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值减小,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变小,电流表A的示数变大,根据P=UI可知,总电压不变,总电流变大,总功率变大,故A错误;
B、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值减小,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变小,电流表A的示数变大。据U=IR知,定值电阻R1两端的电压变大,电压表V1的示数变大,故B错误;
C、闭合开关S,当柔性电阻传感器R2受到的压力增大时,R2接入电路的阻值增大,电路中的总电阻变小,而电源电压不变,根据欧姆定律可知,电路中的电流变大,电流表A的示数变大。据U=IR知,定值电阻R1两端的电压变大,电压表V1的示数变大,总电压U不变,所以V2两端电压变小,电压表V2示数与电流表A示数的比值变小,故C正确;
D、电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值为定值电阻R1的大小,电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值不变,故D错误。
故选:C。
由电路图可知R1、R2串联,电压表V1测R1两端的电压,V2测R2两端的电压,电流表A测电路中的电流;闭合开关S,当柔性电阻传感器R2受到的压力增大时电路电阻的变化,根据欧姆定律可知电路中电流的变化和R1两端的电压变化,电压表V2的示数与电流表A的示数的比值的变化,以及电压表V1示数变化量的绝对值与电流表A示数变化量的绝对值的比值变化情况;根据P=UI可知电路消耗的总电功率的变化。
本题考查动态电路分析、电功率公式以及欧姆定律的应用,难度一般。
8.【答案】
【解析】解:这里的“响彻全场”主要是描述声音的响度,因为响度的大小与声音的振幅有关,振幅越大,响度越大,振幅越小,响度越小。
故答案为:响度。
物理学中把人耳能感觉到的声音的强弱称为响度,响度的大小与声音的振幅有关,振幅越大,响度越大,振幅越小,响度越小。
此题要结合声音的特征响度定义进行分析解答,注意与其它特征的区分。
9.【答案】
【解析】解:“白雾”主要是高温水蒸气液化(液化指物质由气态转变成液态)形成的小水珠。
故答案为:液化。
液化指物质由气态转变成液态。
本题考查了液化现象,属于基础题。
10.【答案】
【解析】解:将高压充电线圈(周围产生很强的磁场)埋在公路沥青下方,新能源汽车底部安装线圈,当新能源汽车从高压充电线圈上方驶过时,汽车底部线圈切割磁感线,会产生感应电流,从而实现低功率的无线充电,其无线充电的原理是电磁感应现象。
故答案为:感应电流。
闭合电路的部分导体,在磁场中做切割磁感线运动,导体中就会产生感应电流,这是电磁感应现象。
此题考查了电磁感应现象的应用,理解电磁感应现象的运用及产生感应电流的条件。
11.【答案】
【解析】解:该狮子鱼所受的海水的压强为:
p===8×107Pa,
该狮子鱼在海水中所处深度为:
h===8×103m。
故答案为:8×103。
根据p=求出该狮子鱼所受的海水的压强,再根据p=ρgh求出该狮子鱼在海水中所处深度。
本题主要考查的是压强的定义是和液体压强公式的应用,难度不大。
12.【答案】
【解析】解:动滑轮绳子股数为2,若不计摩擦和绳重,根据F=(G+G动)可知,物重为:
G=nF-G动=2×500N-100N=900N,
则该动滑轮的机械效率为:
η=====×100%=90%。
故答案为:90%。
动滑轮绳子股数为2,若不计摩擦和绳重,根据F=(G+G动)求出物重,利用η====求出该动滑轮的机械效率。
本题主要考查的是滑轮组的机械效率,关键是会根据题目的条件进行简单的计算。
13.【答案】
【解析】解:0.24kg氢气完全燃烧放出的热量:
Q放=qm=1.4×108J/kg×0.24kg=3.36×107J;水吸收的热量Q吸=Q放=3.36×107J,
由Q吸=cmΔt知,水的质量为:
m′===100kg。
故答案为:100。
已知天然气的体积和热值,可求产生的热量,产生的热量被水吸收,知道水的比热容、水的初温和末温,利用吸热公式Q=cmΔt求水的质量。
本题考查了学生对吸热公式Q吸=cmΔt、燃料完全燃烧放热公式Q放=mq的掌握和运用,难度不大。
14.【答案】
【解析】解:用测电笔分别测试如图所示家庭简化电路中的a、b、c、d四点,测试a、b和c点氖管均发光,说明a、b、c三个点与火线是连通的,测试d点氖管不发光,d点与零线是连通的,可能是cd之间是断开的。
故答案为:c、d之间断路。
测电笔是辨别火线和零线的工具,正常使用时,接触火线氖管发光,接触零线,氖管不发光。
本题考查的是测电笔的使用方法,会判断简单的电路故障。
15.【答案】
【解析】解:如图甲所示,R1、R2为串联关系,电压表测量R1的电压;
根据串联分压规律,R1:R2=U1:U2=1V:(3V-1V)=1:2;
将R1、R2接入图乙电路,两个电阻并联,电流表测量干路电流,
根据并联电流之比等于电阻倒数的比,故I1:I2=R2:R1=2:1;
根据干路电流等于各支路电流之和,则I1+I2=0.3A;
解得通过电阻R1的电流I1=0.2A。
故答案为:0.2。
根据串联分压规律计算两个电阻的比值,根据并联分流规律计算电流的比值,结合干路电流等于各支路电流之和计算通过电阻R1的电流。
本题考查动态电路与欧姆定律以及串并联的特点,属于中档题。
16.【答案】
【解析】解:由图乙可知,同时闭合开关S和S1,R1与R2并联;再断开开关S1,电路为R2的简单电路,
由于并联电路的各支路互不影响,所以通过R2的电流不变,
通过R1的电流等于电流的变化量,即I1=ΔI=1A,
根据并联电路的电流规律可得,通过R2的电流:I2=I-I1=1.5A-1A=0.5A,
电源电压不变,根据P=UI可知,R1与R2并联时电路消耗的功率较大,装置处于高温挡;
电路中只有R2工作时,电路消耗的功率较小,装置处于低温挡;
并联电路各支路两端的电压相等,由欧姆定律可得R2两端的电压:
U2=U1=I1R1=1A×12Ω=12V,
则在“低温”除雾功能下工作0.5min电路产生的热量:
Q=R2t=U2I2t=12V×0.5A×0.5×60s=180J。
故答案为:180。
由图乙可知,同时闭合开关S和S1,R1与R2并联;再断开开关S1,电路中只有R2工作,根据并联电路的特点可知通过R1的电流,根据并联电路的电流规律可得通过R2的电流,根据P=UI可知判断装置的工作挡位,根据欧姆定律可得R2两端的电压,根据Q=I2Rt=UIt求在“低温”除雾功能下工作0.5min电路产生的热量。
本题考查并联电路的特点和欧姆定律、焦耳定律的应用,难度一般。
17.【答案】
【解析】解:图中法线已经画出,根据反射角等于入射角画出光线OB的反射光线,光从玻璃斜射入空气中时,折射角大于入射角,据此画出光线OB的折射光线,如图所示:
根据反射角等于入射角画出反射光线,根据折射规律画出折射光线。
本题考查光的反射定律与折射规律的应用,属于中档题。
18.【答案】
【解析】(1)如甲图所示,用镊子将游码归零,指针将偏向左侧,再向右调节平衡螺母,直至指针指示在分度盘中间;
(2)天平的分度值为0.2g,则游码对应的刻度值为0.2g;砝码的质量为60g,所以10枚硬币的质量为60g+0.2g=60.2g,则1枚硬币的质量为g=6.02g。
故答案为:(1)右;(2)6.02。
(1)首先把天平放在水平桌面上,把游码归零,再调节平衡螺母直到横梁平衡;
(2)物体的质量等于砝码质量与游码对应刻度值之和。
本题考查天平的使用以及累积法测物体的质量,难度不大。
19.【答案】
【解析】(1)因为杠杆的重心在支点上,所以力臂为零;
(3)根据杠杆的平衡条件,动力×动力臂=阻力×阻力臂,为验证:”动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离“是错误的,只有当动力臂不等于支点到动力作用点的距离时,看实验结论是否成立,所以在图丙的基础上,保持原器材不变,改变弹簧测力计拉力的方向。
故答案为:(1)0;(3)改变弹簧测力计拉力的方向。
(1)调节杠杆两端的螺母,使杠杆在不挂钩码时处于水平平衡状态,这时杠杆的重心在支点上;
(3)只有力的方向与杠杆垂直时,支点到动力作用点的距离等于力臂的大小,若力的方向与杠杆不垂直时,则支点到动力作用点的距离不等于力臂的大小,据此分析。
本题研究杠杆平衡条件,考查器材调试,对力臂的理解及根据杠杆平衡条件的运用,难度适中。
20.【答案】
【解析】(1)要求滑片向右移动时小灯泡变亮,电路的电流变大电阻变小,故变阻器右接线柱连入电路中,如下所示:
(2)闭合开关,调节滑动变阻器进行多次测量,记下对应的电流和电压值,其中第2次实验中电流表示数如图乙所示,分度值为0.02A,电流为0.28A,则小灯泡正常发光时的电阻为
R=≈8.9Ω
(3)由于小灯泡的灯丝电阻随温度变化而变化,当电压变化时,电流变化,温度变化,电阻变化;设灯泡两端电压为U1,U2,对应的电流为I1,I2,则
RL1=
RL2=
ΔRL=|-|
对于滑动变阻器,设其两端电压为U滑1,U滑2,对应的电流为I1,I2,则
R滑1=
R滑2=
ΔR=|-|
由于串联电路电压关系:U=UL+U滑,当电源电压不变时ΔUL=-ΔU滑,根据I=知ΔRL和ΔR的大小关系取决于电压和电流的变化关系;一般情况下,小灯泡电阻变化主要是因为温度对灯丝电阻的影响,而滑动变阻器电阻变化是因为接入电路的长度变化。在串联电路中,电流相同,当小灯泡电压变化时,滑动变阻器电压反向变化,但是由于小灯泡电阻变化时非线性的(因为温度对电阻影响较大),而滑动变阻器电阻变化时线性的(与接入长度成正比),所以ΔRL<ΔR;
(4)实验结束后,同组的小红想用该实验装置探究电流与电阻的关系,要控制电阻的电压不变,实验中要用不同的定值电阻,灯的电阻不是一个定值,且电阻未知,该装置是不可行。
故答案为:(1)见解析中的图;(2)8.9;(3)<;(4)不可行,灯的电阻不是一个定值,且电阻未知。
(1)滑片向右移动时小灯泡变亮,可知电路的电流变大电阻变小,确定变阻器右接线柱连入电路中;
(2)根据电流表分度值读数,由欧姆定律得出小灯泡正常发光时的电阻;
(3)因电源电压不变,根据欧姆定律先判断出两种情况下总电阻的变化,再根据灯的电阻随温度的减小而减小和串联电阻的规律分析回答;
(4)探究电流与电阻的关系要控制电压不变,改变定值电阻的大小。
本题“测量小灯泡电阻”的实验,考查电路连接、操作过程、欧姆定律的定律及对实验方案的评估。
21.【答案】
【解析】(1)若无人机在100s内提着重500N的水果匀速竖直上升了50m,拉力和重力是平衡力,由二力平衡可知,无人机对水果的拉力F=G=500N,
拉力对水果做的功W=Fh=Gh=500N×50m=25000J;
(2)拉力对水果做功的功率。
答:(1)无人机拉力对水果做的功是25000J;
(2)无人机拉力对水果做功的功率是250W。
(1)无人机做匀速直线运动,拉力和重力是平衡力,大小相等,根据W=Fh得到无人机拉力对水果做的功;
(2)根据P=得到无人机拉力对水果做功的功率。
本题考查功和功率的计算,需要知道功和功率的公式。
22.【答案】
【解析】(1)开关S1闭合、S2断开时,R1与滑动变阻器R串联,电流表测电路中的电流,电压表测变阻器两端的电压;
当电流表示数为I1=0.4A时,由图乙可知,此时滑动变阻器的功率P=5.6W,
由P=UI可得滑动变阻器两端的电压为:UR===14V;
(2)当电流表示数为0.4A时,由串联电路的电压特点和欧姆定律可得电源电压:U=UR+I1R1=14V+0.4A×R1---①,
当电流表示数为I2=1.1A时,由图乙可知,此时滑动变阻器消耗的功率P′=7.7W,
由P=UI可得此时滑动变阻器两端的电压:UR′===7V,
同理可得电源电压:U=UR′+I2R1=7V+1.1A×R1---②,
联立①②解得:U=18V,R1=10Ω;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电阻R1与R2并联,
此时电路消耗的总功率:
。
答:(1)滑动变阻器两端的电压为14V;
(2)电源电压为18V,电阻R1的阻值为10Ω;
(3)电路消耗的总功率为50.4W。
(1)开关S1闭合、S2断开时,R1与滑动变阻器R串联,电流表测电路中的电流,电压表测变阻器两端的电压;
当电流为0.4A时,从乙图中找到对应的滑动变阻器的功率,根据P=UI求出滑动变阻器两端的电压;
(2)当电流表示数为0.4A时,根据串联电路的电压特点和欧姆定律表示出电源电压;
当电流表示数为1.1A时,先根据P=UI求出此时滑动变阻器两端的电压,再根据串联电路的电压特点和欧姆定律表示出电源电压,联立方程组,解出电源电压和R1的阻值;
(3)同时闭合开关S1、S2,滑片移动到最左端时,电阻R1与R2并联,根据公式P=求出R1、R2的功率,两者相加即为电路消耗的总功率。
本题考查了欧姆定律的应用电功率的计算,关键是根据图像中的信息利用电源电压不变建立方程组。
23.【答案】
【解析】(1)甲图中金属盒漂浮,根据漂浮时浮力等于重力,故F浮=G=mg;
(2)图乙中,设进入金属盒中水的体积为V水,则金属盒增大的重力ΔG=ρ水gV水
金属盒增大的浮力ΔF浮=ρ水gΔV排;根据漂浮时浮力等于重力
故增大的浮力等于增大的重力,即ΔF浮=ΔG=ρ水gΔV排=ρ水gV水,ΔV排=V水,即增大的排开液体的体积与进入的水体积相等,所以题图乙和题图甲中的水面高度相同;
(3)题图丙中金属盒沉底后受到重力、浮力和支持力的作用,根据力的平衡可知,金属盒受到的支持力F=G-F浮=mg-ρ水g=0.3kg×10N/kg-1.0×103kg/m3×10N/kg×=2N。
答:(1)图甲中金属盒受到的浮力是mg;
(2)见解答;
(3)图丙中金属盒受到的支持力是2N。
(1)根据漂浮时浮力等于重力计算;
(2)根据漂浮时浮力等于重力,增大的浮力计算增大的排开液体的体积与进入的水体积比较分析;
(3)根据金属盒受力平衡,结合压力等于浮力减去重力计算。
本题考查浮沉条件与阿基米德原理以及密度和重力公式的应用,属于中档题。
第1页,共1页
同课章节目录