常用机构 课件1
图片预览

文档简介
(共83张PPT)
第二章 常用机构
1.平面四连杆机构形式及条件
2.平面四杆机构的工作特性
(一)教学要求
1.了解的组成;掌握运动副及机构运动简图
2.熟悉平面四杆机构的基本类型、应用及平面四杆机构的演化。
2.理解平面四杆机构的几个工作特性。
(二)教学的重点与难点
第二章 常用机构
2.1机械的组成
1.机械
机械是能把能量转换成机械能,并利用机械能完成某些工作的装置.
机 械
机器和机构的统称
一、机械
2.机械的组成
机械是由原动机部分、传动装置部分、工作装置和控制部分组成。
动力部分是机器动力的来源。
工作部分是直接完成机器工作任务的部分。
传动装置是将动力部分的运动和动力传递给工作部分的中间环节。
控制部分:控制机器的开动和停止,改变运动的速度和方向等等
二、机器、机构
机器的特征:
1.机器是由许多构件组成;
2.各构件之间有相对确定的运动;
3.机器能利用机械能来完成有效的功或实现不同形式能量之间的转化.
机器的作用体现它的第三条基本特征上.
机构
机构是实现传递机械运动和动力或改变机械运动形式的构件组合体。它只符合机器的前两个特征。
“美女机器人”
实例
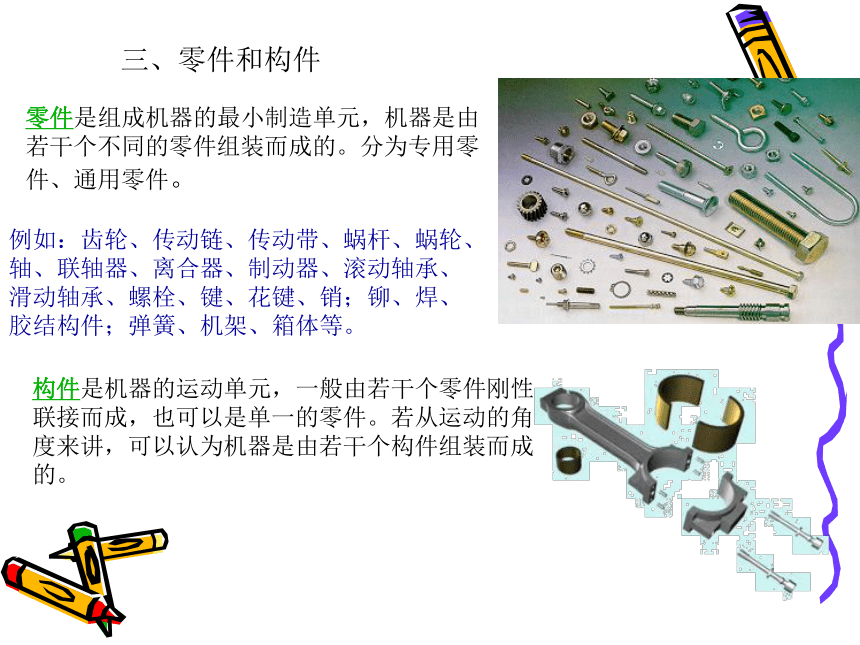
三、零件和构件
零件是组成机器的最小制造单元,机器是由若干个不同的零件组装而成的。分为专用零件、通用零件。
构件是机器的运动单元,一般由若干个零件刚性联接而成,也可以是单一的零件。若从运动的角度来讲,可以认为机器是由若干个构件组装而成的。
例如:齿轮、传动链、传动带、蜗杆、蜗轮、轴、联轴器、离合器、制动器、滚动轴承、滑动轴承、螺栓、键、花键、销;铆、焊、胶结构件;弹簧、机架、箱体等。
2.2 运动副及机构运动简图
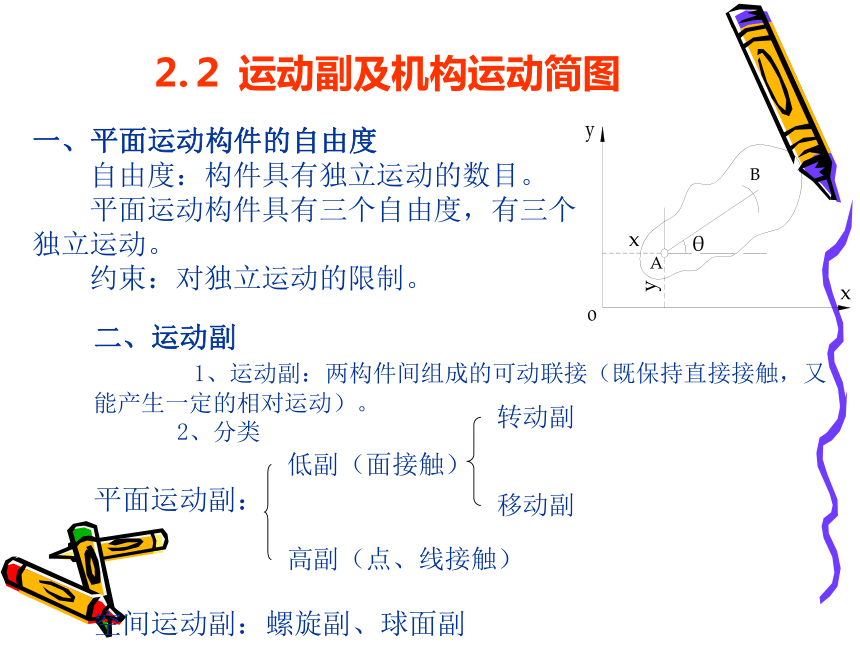
一、平面运动构件的自由度
自由度:构件具有独立运动的数目。
平面运动构件具有三个自由度,有三个独立运动。
约束:对独立运动的限制。
二、运动副
1、运动副:两构件间组成的可动联接(既保持直接接触,又能产生一定的相对运动)。
2、分类
平面运动副:
低副(面接触)
高副(点、线接触)
转动副
移动副
空间运动副:螺旋副、球面副
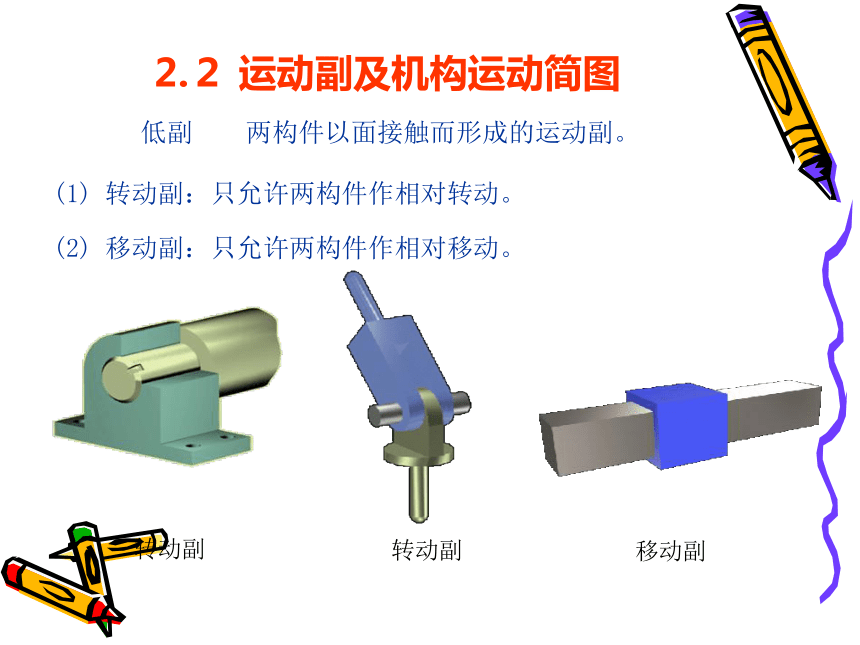
低副 两构件以面接触而形成的运动副。
(1) 转动副:只允许两构件作相对转动。
(2) 移动副:只允许两构件作相对移动。
转动副
转动副
移动副
2.2 运动副及机构运动简图
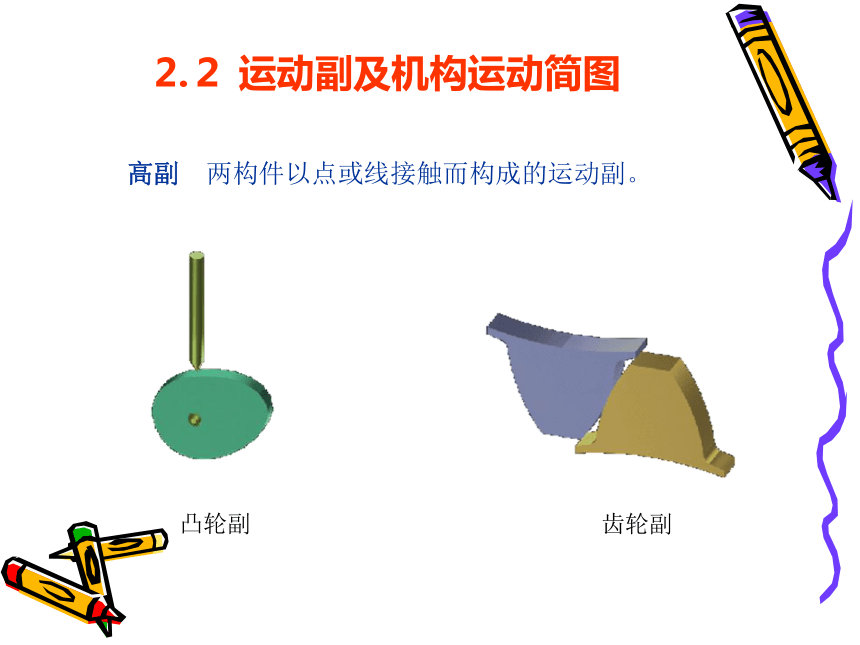
高副 两构件以点或线接触而构成的运动副。
齿轮副
凸轮副
2.2 运动副及机构运动简图
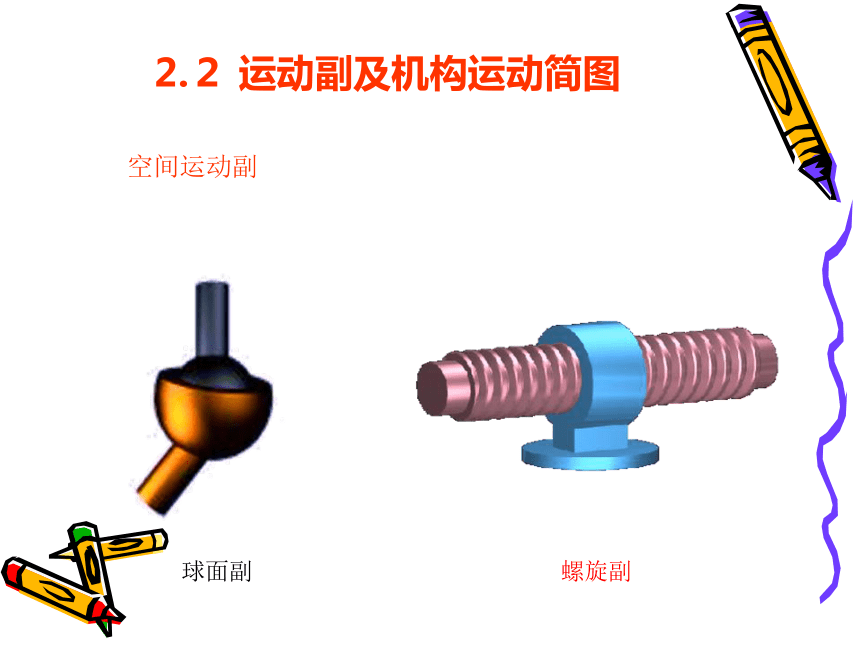
空间运动副
螺旋副
球面副
2.2 运动副及机构运动简图
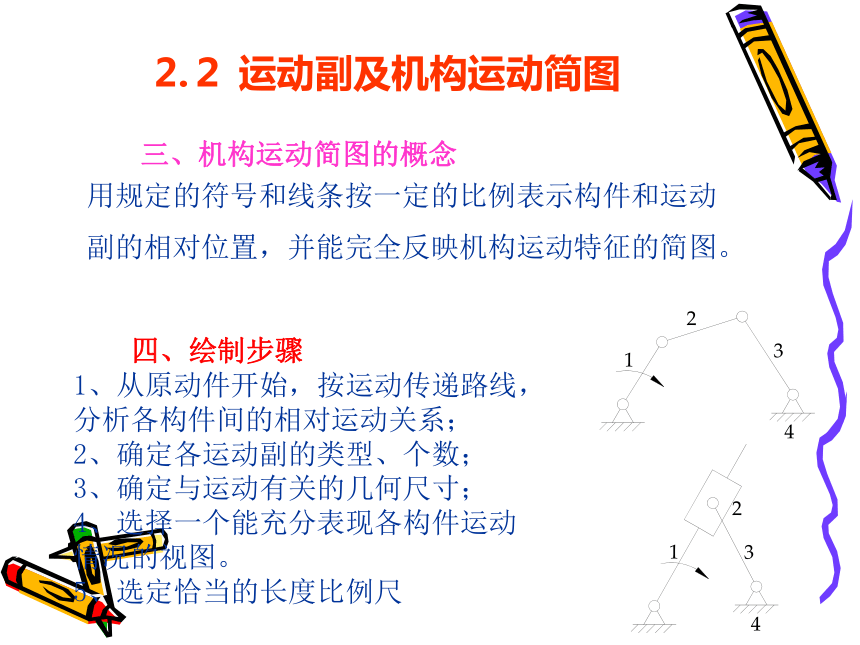
三、机构运动简图的概念
用规定的符号和线条按一定的比例表示构件和运动副的相对位置,并能完全反映机构运动特征的简图。
四、绘制步骤
1、从原动件开始,按运动传递路线,分析各构件间的相对运动关系;
2、确定各运动副的类型、个数;
3、确定与运动有关的几何尺寸;
4、选择一个能充分表现各构件运动情况的视图。
5、选定恰当的长度比例尺
2.2 运动副及机构运动简图
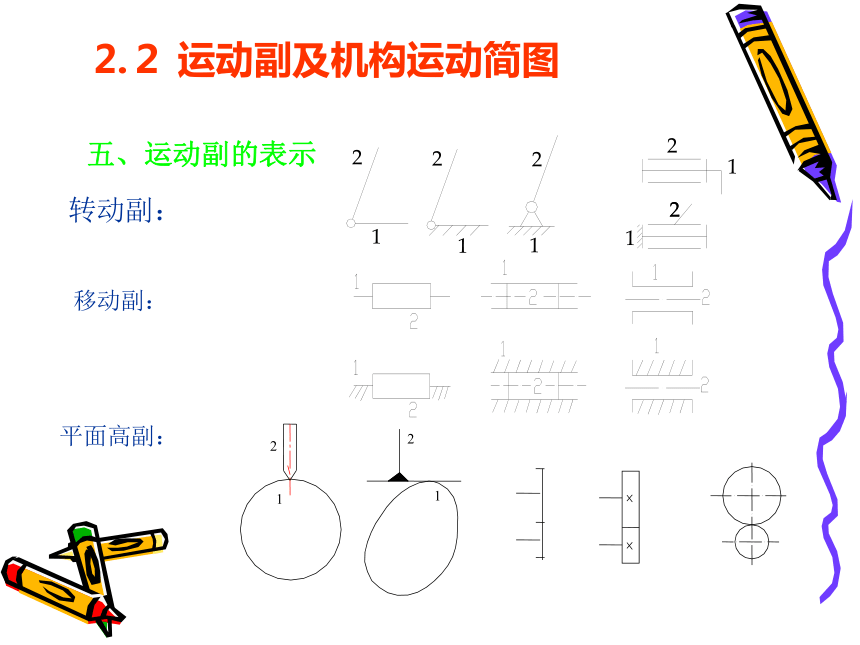
五、运动副的表示
转动副:
移动副:
平面高副:
2
1
1
2
2.2 运动副及机构运动简图
例题1 绘制如图所示的颚式破碎机主体机构的运动简图
2.2 运动副及机构运动简图
六.平面机构的自由度
1、自由度:把构件相对于参考系具有的独立运动参数的数目称
为自由度,作平面运动的自由构件有三个自由度。
2、机构自由度计算:机构相对于机架所具有的独立运动数目,称为机
构的自由度。
计算公式:F=3n-2PL-PH
其中:n:在一个机构中除机架以外的所有构件的数目。
PL:低副数
PH:高副数
3、机构具有确定运动的条件:
原动件数> F, 机构破坏
原动件数< F ,机构运动不确定
原动件数= F
2
3
4
1
j
2.2 运动副及机构运动简图
4、平面机构自由度计算的注意事项
1)复合铰链
三个或三个以上构件在同一处构成共轴线转动副的铰链,我们称为复合铰链。
惯性筛的机构运动简图
若有m个构件组成复合铰链,则复合铰链处的转动副数应为
(m-1)个
2.2 运动副及机构运动简图
2)局部自由度
与机构运动无关的构件独立运动称为局部自由度。
2
2
3
A
1
1
3
对于含有局部自由度的机构在计算自由度时,不考虑局部自由度
(如图2)
实际结构中采用局部自由度是为了减小摩擦力,“除去”指计算中不计入,并非实际拆除
1
2
2.2 运动副及机构运动简图
3)虚约束
(1)不同构件上两点间的距离保持恒定
(2)两构件构成多个移动副且导路互相平行
(3)两构件构成多个转动副且轴线互相重合
(4)在输入件与输出件之间用多组完全相同的运动链来传递运动
2
2
1
3
2
H
2.2 运动副及机构运动简图
2.3平面四连杆机构
平面连杆机构是由若干个构件通过低副(转动副和移动副)联接而成的机构,又称为平面低副机构。
由四个构件通过低副联接而成的平面连杆机构,称为平面四杆机构。它是平面连杆机构中最常见的形式,也是组成多杆机构的基础。
如果所有低副均为转动副,这种四杆机构就称为铰链四杆机构。它是平面四杆机构中最基本的形式,其他形式的四杆机构都是在它的基础上演化而成的。连杆机构中的构件称为杆。
1
A
4
2
3
C
B
D
平面连杆机构的优点
由于是面接触,所以承受压强小、便于润滑、磨损较轻,可承受较大载荷
结构简单,加工方便,构件工作可靠
可实现多种形式的运动,满足多种运动规律要求
可满足多种运动轨迹的要求
平面连杆机构的缺点
根据从动件所需要的运动规律或轨迹来设计连杆机构比较复杂,精度不高。
运动时产生的惯性力难以平衡,不适于高速场合。
平面四杆机构
基本形式 (全转动副)
演化形式
(有移动副)
曲柄摇杆机构
双曲柄机构
双摇杆机构
曲柄滑块机构
曲柄导杆机构
曲柄摇块机构
定块机构
一.四杆机构的基本形式
二.四杆机构的基本形式
平面四杆机构的基本型式是铰链四杆机构,如图所示,其中AD杆为机架,与机架相连的AB杆和CD杆称为连架杆,与机架相对的BC杆称为连杆。
其中能作整周回转运动的连架杆称为曲柄; 只能在一定范围内摆动的连架杆称为摇杆。
1、曲柄摇杆机构
应用:颚式破碎机机构、搅面机、卫星天线、缝纫机踏板机构、脚踏砂轮机机构等。
根据连架杆有无曲柄,可分为三种基本形式
两连架杆中一个为曲柄,一个为摇杆的四杆机构,称为曲柄摇杆机构。
曲柄摇杆机构应用实例(一)
颚式破碎机机构动画展示
曲柄摇杆机构应用实例(二)
搅面机机构动画展示
曲柄摇杆机构应用实例(三)
雷达天线俯仰角调整机构
曲柄摇杆机构应用实例(四)
缝纫机脚踏板机构
脚踏砂轮机机构
两连杆架均为曲柄的四杆机构称为双曲柄机构。
应用:
惯性筛、插床机构
2.双曲柄机构
惯性筛
双曲柄机构应用实例(一)
双曲柄机构应用实例(二)
插床机构
双曲柄机构中,若相对的两杆长度分别相等,称为平行双曲柄机构。当两曲柄转向相同时,它们的角速度时时相等, 连杆也始终与机架平行,四根杆形成一平行四边形,故又称平行四边形机构。
机车车轮联动机构
平行四边形机构的应用实例
两连杆架均为摇杆的四杆机构称为双摇杆机构。
1、港口起重机
2、飞机起落架
3、电风扇的摇头机构
应用:
3.双摇杆机构
双摇杆机构应用实例(一)
港口起重机动画展示
飞机起落架动画展示
风扇摇头机构
双摇杆机构应用实例(三)
平面四杆机构有曲柄的条件
1.铰链四杆机构有曲柄的条件
三.平面四杆机构的基本特性
a+d≤b+c
a+c≤b+d
a+b≤c+d
由三角形两边之和大于第三边原理得
将以上三式两两相加, 整理得
由此得铰链四杆机构曲柄存在的条件:
最短构件条件
构件的长度和条件
此两构件中必有一构件为运动链中最短构件。
最短构件与最长构件的长度之和小于或等于其它两构件长度之和。
a≤b
a≤d
a≤c
1)取最短构件AB的邻边构件AD(或BC)为机架,
AB-曲柄,CD-摇杆
1、若LAB+LBC ≤LAD+LCD
铰链四杆机构如图,AB为最短构件, BC为最长构件
——曲柄摇杆机构
2)取最短构件AB为机架,BC-曲柄,AD-曲柄
——双曲柄机构
3)取最短构件的对边构件CD为机架,BC-摇杆,AD-摇杆
——双摇杆机构
2、若LAB+LBC > LAD+LCD
则不论取哪一个构件为机架,都只能得到双摇杆机构。
L1+L2 ≤L3+L4
L1+L2 ≥ L3+L4
结论:
(1)在铰链四杆机构中,若最短杆与最长杆的长度之和大于其余两杆长度之和时,则不论取哪一个构件为机架,都只能得到双摇杆机构。
(2)在铰链四杆机构中,若最短杆与最长杆的长度之和小于或等于其余两杆长度之和时:
取最短构件为机架
—双曲柄机构
取最短构件任一相邻构件为机架
—曲柄摇杆机构
取最短构件对面的构件为机架
—双摇杆机构
2.曲柄滑块机构有曲柄的条件:
△ AC1E:b-a>e
e=0, b>a
△ AC2E:a+b>e
即曲柄滑块机构有曲柄的条件:
b>a+e
3.急回特性
曲柄摇杆机构中,曲柄AB为主动件,作匀速回转运动,摇杆CD为从动件作往复摆动。
C1D,C2D——摇杆的两个极限位置
—摆角
极位夹角:摇杆在两极限位置时,曲柄两位置间所夹的锐角称为极位夹角。
—极位夹角
当曲柄AB1位置顺时针转到AB2,摇杆由左极限位置C1D摆到右极限位置C2D,设经历的时间为t1,
C点的平均速度
曲柄再由AB2位置回到AB1位置时,
摇杆自C2D摆回到C1D,设经历的时间为t2,
C点的平均速度
t1>t2
所以v2>v1。
v1=C1C2/t1
v2=C2C1/t2
摇杆摆回速度比摆去速度快的性质,称急回特性。
行程速度变化系数
铰链四杆机构有无急回运动特性取决于该机构有无极位夹角
偏置曲柄滑块机构
机构有急回特性
>0
摆动导杆机构
机构有急回特性
>0
θ =0无急回特征
θ >0有急回特征
θ >0有急回特征
结论:
牛头刨床机构
急回特性的应用
4.死点位置
曲柄摇杆机构, 当CD为原动件时, 在曲柄与连杆共线的位置出现传动角γ等于0°的情况, 这时无论连杆BC对曲柄AB的作用力有多大, 都不能使曲柄转动。机构的这种位置称为死点位置。
四杆机构中有无死点位置, 取决于从动件是否与连杆共线。
对曲柄摇杆机构而言,当曲柄为原动件时,摇杆与连杆无共线位置,不出现死点。当摇杆为原动件时,曲柄与连杆共线位置的位置为死点位置。
死点位置的判断
对于传动机构,设计时必须考虑机构顺利通过死点位置的问题,如利用构件的惯性作用,使机构通过死点。工程上有时也利用死点位置提高机构工作的可靠性。
缝纫机踏板机构
缝纫机就是借助带轮的惯性使机构通过死点位置。
飞机起落架
当机轮着陆时,BC杆和CD杆共线,机构处于死点位置,即使轮子上受到很大的力, 构件BC也不会使CD杆转动(起落架不会折回),使飞机着陆可靠。
飞机起落架动画展示
钻床工件夹紧装置(动画展示)
当工件被夹紧后, 机构处于死点位置, 无论工件的反力多大, 夹具也不会自行松脱。
2.4 平面四杆机构的演化
在平面连杆机构中,除了上述三种形式的铰链四杆机构之外,在实际机器中还广泛采用其他形式的四杆机构。这些四杆机构可认为是通过改变某些构件的形状、改变构件的相对长度、改变某些运动副的尺寸、或者选择不同的构件作为机架等方法,由四杆机构的基本型式演化而成的。
1.扩大转动副,使转动副变成移动副
2)偏置曲柄滑块机构
1)对心曲柄滑块机构
曲柄滑块机构
对心曲柄滑块机构
曲柄滑块机构应用实例(一)
小型刨床机构
冲压机构
曲柄滑块机构应用实例(二)
曲柄滑块机构的演化
通过改变运动副的尺寸,对心曲柄滑块机构可以演化成偏心轮机构。
a、曲柄摇杆机构
b、双曲柄机构
c、曲柄摇杆机构
d、双摇杆机构
2.通过选用不同构件为机架而演化成的四杆机构
(1)在铰链四杆机构中:
3.通过选用不同构件为机架而演化成的四杆机构
当构件2做整周转动时,导杆4也做整周回转,该机构称为转动导杆机构;当构件2做整周转动时,导杆只能往复摆动,称为摆动导杆机构。
(1)取构件1为机架,可得到导杆机构。
曲柄滑块机构中:
转动导杆机构
摆动导杆机构
简易刨床的主运动机构
转动导杆机构的应用
牛头刨床的主运动机构
摆动导杆机构的应用
曲柄摇块机构
当曲柄滑块机构中取构件2为机架时,可转化为曲柄摇块机构。
(2)摇块机构
曲柄滑块机构
自卸卡车翻斗机构
曲柄摇块机构应用
当曲柄滑块机构中取滑块3为机架时,即可转化为移动导杆机构。
(3)移动导杆机构
应用: 手动压水机
移动导杆机构
曲柄滑块机构
手动压水机构
移动导杆机构应用
2.5 凸轮机构和棘轮机构
棘轮机构-主动件的连续往复摆动转换为棘
轮的单向间歇运动
制动爪
主动件
摇杆
驱动棘爪
棘轮
弹簧
齿式内棘轮机构
一、齿式棘轮机构
单动式
齿式外棘轮机构
总目录
本章
上页
下页
双动式
可变向式
结构简单,运动可靠; 主从动关系可互换,动程可在较大范围内调节,动停时间比可通过选择合适的驱动机构实现。
优点
缺点
动程只能有级调节;有噪声、冲击、磨损,不宜用于高速场合。
齿式棘轮机构特点
二、摩擦式棘轮机构
传动平稳、无噪音,传递扭矩较大,动程可无级调节。
优点
缺点
摩擦式棘轮机构特点
由于靠摩擦力传动,会出现打滑现象,一方面起到过载保护,另一方面也使传动精度降低。
适用于低速轻载的场合。
三 棘轮机构的应用
凸轮式间歇运动机构运转可靠、转位精确、无需专门的定位装置,但凸轮式间歇运动机构精度要求较高、加工比较复杂、安装调整比较困难。
凸轮式间歇运动机构在轻工机械、冲压机械等高速机械中常用作高速、高精度的步进进给、分度转位等机构。
凸轮式间歇运动机构的特点
应用
四. 凸轮式间歇机构
应用
弧面凸轮式间歇运动机构
总 结
1、铰链四杆机构的基本类型、应用
2、铰链四杆机构的演化
3、平面四杆机构的几个工作特性
(1)曲柄存在的条件
(2)压力角和传动角
(3)急回特性
(4)死点位置
1、对于铰链四杆机构,当满足构件长度和条件时,若取( D )为机架,将得到曲柄摇杆机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D.与最短杆相邻的构件
2、曲柄摇杆机构,当( D )时,机构处于死点位置。
A.曲柄为原动件、曲柄与机架共线
B.曲柄为原动件、曲柄与连杆共线
C.摇杆为原动件、曲柄与机架共线
D.摇杆为原动件、曲柄与连杆共线
3、在曲柄摇杆机构中,当曲柄为原动件时,(C )死点位置。
A. 有一个 B. 没有 C. 有两个 D. 有三个
复习思考题
4、 对于铰链四杆机构,当满足杆长之和的条件时,若取( A )为机架,将得到双曲柄机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D. 与最短杆相邻的构件
5、曲柄摇杆机构,摇杆为原动件当( B )时,机构处于极限位置。
A.曲柄与机架共线 B.曲柄与连杆共线
C.摇杆与机架共线 D.摇杆与连杆共线
6、对于铰链四杆机构,当从动件的行程速比系数(B )时,机构必有急回特性。
A.K>0 B.K>1 C.K<1 D.K=1
7、对于铰链四杆机构,当满足杆长之和的条件时,若取( B )为机架,将得到双摇杆机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D.与最短杆相邻的构件
8.铰链四杆机构中,a=60mm,b=150mm,c=120mm,d=100mm。
(1) 以a杆为机架得(双曲柄)机构;
(2) 以b杆为机架得(双摇杆)机构
(3) 以c杆为机架得(双摇杆)机构
(4) 以d杆为机架得(曲摇杆)机构
9、连杆机构中的急回特性是什么含义?什么条件下机构才具有急回特性?
10、铰链四杆机构中曲柄存在的条件是什么?曲柄是否一定是最短杆?
11、如何依照各杆长度判别铰链四杆机构的型式?
12、平面四连杆机构最基本形态是什么?由它演化为其它平面四杆机构,有哪些具体途径?
13、何谓连杆机构的死点?举出避免死点和利用死点的例子。
第二章 常用机构
1.平面四连杆机构形式及条件
2.平面四杆机构的工作特性
(一)教学要求
1.了解的组成;掌握运动副及机构运动简图
2.熟悉平面四杆机构的基本类型、应用及平面四杆机构的演化。
2.理解平面四杆机构的几个工作特性。
(二)教学的重点与难点
第二章 常用机构
2.1机械的组成
1.机械
机械是能把能量转换成机械能,并利用机械能完成某些工作的装置.
机 械
机器和机构的统称
一、机械
2.机械的组成
机械是由原动机部分、传动装置部分、工作装置和控制部分组成。
动力部分是机器动力的来源。
工作部分是直接完成机器工作任务的部分。
传动装置是将动力部分的运动和动力传递给工作部分的中间环节。
控制部分:控制机器的开动和停止,改变运动的速度和方向等等
二、机器、机构
机器的特征:
1.机器是由许多构件组成;
2.各构件之间有相对确定的运动;
3.机器能利用机械能来完成有效的功或实现不同形式能量之间的转化.
机器的作用体现它的第三条基本特征上.
机构
机构是实现传递机械运动和动力或改变机械运动形式的构件组合体。它只符合机器的前两个特征。
“美女机器人”
实例
三、零件和构件
零件是组成机器的最小制造单元,机器是由若干个不同的零件组装而成的。分为专用零件、通用零件。
构件是机器的运动单元,一般由若干个零件刚性联接而成,也可以是单一的零件。若从运动的角度来讲,可以认为机器是由若干个构件组装而成的。
例如:齿轮、传动链、传动带、蜗杆、蜗轮、轴、联轴器、离合器、制动器、滚动轴承、滑动轴承、螺栓、键、花键、销;铆、焊、胶结构件;弹簧、机架、箱体等。
2.2 运动副及机构运动简图
一、平面运动构件的自由度
自由度:构件具有独立运动的数目。
平面运动构件具有三个自由度,有三个独立运动。
约束:对独立运动的限制。
二、运动副
1、运动副:两构件间组成的可动联接(既保持直接接触,又能产生一定的相对运动)。
2、分类
平面运动副:
低副(面接触)
高副(点、线接触)
转动副
移动副
空间运动副:螺旋副、球面副
低副 两构件以面接触而形成的运动副。
(1) 转动副:只允许两构件作相对转动。
(2) 移动副:只允许两构件作相对移动。
转动副
转动副
移动副
2.2 运动副及机构运动简图
高副 两构件以点或线接触而构成的运动副。
齿轮副
凸轮副
2.2 运动副及机构运动简图
空间运动副
螺旋副
球面副
2.2 运动副及机构运动简图
三、机构运动简图的概念
用规定的符号和线条按一定的比例表示构件和运动副的相对位置,并能完全反映机构运动特征的简图。
四、绘制步骤
1、从原动件开始,按运动传递路线,分析各构件间的相对运动关系;
2、确定各运动副的类型、个数;
3、确定与运动有关的几何尺寸;
4、选择一个能充分表现各构件运动情况的视图。
5、选定恰当的长度比例尺
2.2 运动副及机构运动简图
五、运动副的表示
转动副:
移动副:
平面高副:
2
1
1
2
2.2 运动副及机构运动简图
例题1 绘制如图所示的颚式破碎机主体机构的运动简图
2.2 运动副及机构运动简图
六.平面机构的自由度
1、自由度:把构件相对于参考系具有的独立运动参数的数目称
为自由度,作平面运动的自由构件有三个自由度。
2、机构自由度计算:机构相对于机架所具有的独立运动数目,称为机
构的自由度。
计算公式:F=3n-2PL-PH
其中:n:在一个机构中除机架以外的所有构件的数目。
PL:低副数
PH:高副数
3、机构具有确定运动的条件:
原动件数> F, 机构破坏
原动件数< F ,机构运动不确定
原动件数= F
2
3
4
1
j
2.2 运动副及机构运动简图
4、平面机构自由度计算的注意事项
1)复合铰链
三个或三个以上构件在同一处构成共轴线转动副的铰链,我们称为复合铰链。
惯性筛的机构运动简图
若有m个构件组成复合铰链,则复合铰链处的转动副数应为
(m-1)个
2.2 运动副及机构运动简图
2)局部自由度
与机构运动无关的构件独立运动称为局部自由度。
2
2
3
A
1
1
3
对于含有局部自由度的机构在计算自由度时,不考虑局部自由度
(如图2)
实际结构中采用局部自由度是为了减小摩擦力,“除去”指计算中不计入,并非实际拆除
1
2
2.2 运动副及机构运动简图
3)虚约束
(1)不同构件上两点间的距离保持恒定
(2)两构件构成多个移动副且导路互相平行
(3)两构件构成多个转动副且轴线互相重合
(4)在输入件与输出件之间用多组完全相同的运动链来传递运动
2
2
1
3
2
H
2.2 运动副及机构运动简图
2.3平面四连杆机构
平面连杆机构是由若干个构件通过低副(转动副和移动副)联接而成的机构,又称为平面低副机构。
由四个构件通过低副联接而成的平面连杆机构,称为平面四杆机构。它是平面连杆机构中最常见的形式,也是组成多杆机构的基础。
如果所有低副均为转动副,这种四杆机构就称为铰链四杆机构。它是平面四杆机构中最基本的形式,其他形式的四杆机构都是在它的基础上演化而成的。连杆机构中的构件称为杆。
1
A
4
2
3
C
B
D
平面连杆机构的优点
由于是面接触,所以承受压强小、便于润滑、磨损较轻,可承受较大载荷
结构简单,加工方便,构件工作可靠
可实现多种形式的运动,满足多种运动规律要求
可满足多种运动轨迹的要求
平面连杆机构的缺点
根据从动件所需要的运动规律或轨迹来设计连杆机构比较复杂,精度不高。
运动时产生的惯性力难以平衡,不适于高速场合。
平面四杆机构
基本形式 (全转动副)
演化形式
(有移动副)
曲柄摇杆机构
双曲柄机构
双摇杆机构
曲柄滑块机构
曲柄导杆机构
曲柄摇块机构
定块机构
一.四杆机构的基本形式
二.四杆机构的基本形式
平面四杆机构的基本型式是铰链四杆机构,如图所示,其中AD杆为机架,与机架相连的AB杆和CD杆称为连架杆,与机架相对的BC杆称为连杆。
其中能作整周回转运动的连架杆称为曲柄; 只能在一定范围内摆动的连架杆称为摇杆。
1、曲柄摇杆机构
应用:颚式破碎机机构、搅面机、卫星天线、缝纫机踏板机构、脚踏砂轮机机构等。
根据连架杆有无曲柄,可分为三种基本形式
两连架杆中一个为曲柄,一个为摇杆的四杆机构,称为曲柄摇杆机构。
曲柄摇杆机构应用实例(一)
颚式破碎机机构动画展示
曲柄摇杆机构应用实例(二)
搅面机机构动画展示
曲柄摇杆机构应用实例(三)
雷达天线俯仰角调整机构
曲柄摇杆机构应用实例(四)
缝纫机脚踏板机构
脚踏砂轮机机构
两连杆架均为曲柄的四杆机构称为双曲柄机构。
应用:
惯性筛、插床机构
2.双曲柄机构
惯性筛
双曲柄机构应用实例(一)
双曲柄机构应用实例(二)
插床机构
双曲柄机构中,若相对的两杆长度分别相等,称为平行双曲柄机构。当两曲柄转向相同时,它们的角速度时时相等, 连杆也始终与机架平行,四根杆形成一平行四边形,故又称平行四边形机构。
机车车轮联动机构
平行四边形机构的应用实例
两连杆架均为摇杆的四杆机构称为双摇杆机构。
1、港口起重机
2、飞机起落架
3、电风扇的摇头机构
应用:
3.双摇杆机构
双摇杆机构应用实例(一)
港口起重机动画展示
飞机起落架动画展示
风扇摇头机构
双摇杆机构应用实例(三)
平面四杆机构有曲柄的条件
1.铰链四杆机构有曲柄的条件
三.平面四杆机构的基本特性
a+d≤b+c
a+c≤b+d
a+b≤c+d
由三角形两边之和大于第三边原理得
将以上三式两两相加, 整理得
由此得铰链四杆机构曲柄存在的条件:
最短构件条件
构件的长度和条件
此两构件中必有一构件为运动链中最短构件。
最短构件与最长构件的长度之和小于或等于其它两构件长度之和。
a≤b
a≤d
a≤c
1)取最短构件AB的邻边构件AD(或BC)为机架,
AB-曲柄,CD-摇杆
1、若LAB+LBC ≤LAD+LCD
铰链四杆机构如图,AB为最短构件, BC为最长构件
——曲柄摇杆机构
2)取最短构件AB为机架,BC-曲柄,AD-曲柄
——双曲柄机构
3)取最短构件的对边构件CD为机架,BC-摇杆,AD-摇杆
——双摇杆机构
2、若LAB+LBC > LAD+LCD
则不论取哪一个构件为机架,都只能得到双摇杆机构。
L1+L2 ≤L3+L4
L1+L2 ≥ L3+L4
结论:
(1)在铰链四杆机构中,若最短杆与最长杆的长度之和大于其余两杆长度之和时,则不论取哪一个构件为机架,都只能得到双摇杆机构。
(2)在铰链四杆机构中,若最短杆与最长杆的长度之和小于或等于其余两杆长度之和时:
取最短构件为机架
—双曲柄机构
取最短构件任一相邻构件为机架
—曲柄摇杆机构
取最短构件对面的构件为机架
—双摇杆机构
2.曲柄滑块机构有曲柄的条件:
△ AC1E:b-a>e
e=0, b>a
△ AC2E:a+b>e
即曲柄滑块机构有曲柄的条件:
b>a+e
3.急回特性
曲柄摇杆机构中,曲柄AB为主动件,作匀速回转运动,摇杆CD为从动件作往复摆动。
C1D,C2D——摇杆的两个极限位置
—摆角
极位夹角:摇杆在两极限位置时,曲柄两位置间所夹的锐角称为极位夹角。
—极位夹角
当曲柄AB1位置顺时针转到AB2,摇杆由左极限位置C1D摆到右极限位置C2D,设经历的时间为t1,
C点的平均速度
曲柄再由AB2位置回到AB1位置时,
摇杆自C2D摆回到C1D,设经历的时间为t2,
C点的平均速度
t1>t2
所以v2>v1。
v1=C1C2/t1
v2=C2C1/t2
摇杆摆回速度比摆去速度快的性质,称急回特性。
行程速度变化系数
铰链四杆机构有无急回运动特性取决于该机构有无极位夹角
偏置曲柄滑块机构
机构有急回特性
>0
摆动导杆机构
机构有急回特性
>0
θ =0无急回特征
θ >0有急回特征
θ >0有急回特征
结论:
牛头刨床机构
急回特性的应用
4.死点位置
曲柄摇杆机构, 当CD为原动件时, 在曲柄与连杆共线的位置出现传动角γ等于0°的情况, 这时无论连杆BC对曲柄AB的作用力有多大, 都不能使曲柄转动。机构的这种位置称为死点位置。
四杆机构中有无死点位置, 取决于从动件是否与连杆共线。
对曲柄摇杆机构而言,当曲柄为原动件时,摇杆与连杆无共线位置,不出现死点。当摇杆为原动件时,曲柄与连杆共线位置的位置为死点位置。
死点位置的判断
对于传动机构,设计时必须考虑机构顺利通过死点位置的问题,如利用构件的惯性作用,使机构通过死点。工程上有时也利用死点位置提高机构工作的可靠性。
缝纫机踏板机构
缝纫机就是借助带轮的惯性使机构通过死点位置。
飞机起落架
当机轮着陆时,BC杆和CD杆共线,机构处于死点位置,即使轮子上受到很大的力, 构件BC也不会使CD杆转动(起落架不会折回),使飞机着陆可靠。
飞机起落架动画展示
钻床工件夹紧装置(动画展示)
当工件被夹紧后, 机构处于死点位置, 无论工件的反力多大, 夹具也不会自行松脱。
2.4 平面四杆机构的演化
在平面连杆机构中,除了上述三种形式的铰链四杆机构之外,在实际机器中还广泛采用其他形式的四杆机构。这些四杆机构可认为是通过改变某些构件的形状、改变构件的相对长度、改变某些运动副的尺寸、或者选择不同的构件作为机架等方法,由四杆机构的基本型式演化而成的。
1.扩大转动副,使转动副变成移动副
2)偏置曲柄滑块机构
1)对心曲柄滑块机构
曲柄滑块机构
对心曲柄滑块机构
曲柄滑块机构应用实例(一)
小型刨床机构
冲压机构
曲柄滑块机构应用实例(二)
曲柄滑块机构的演化
通过改变运动副的尺寸,对心曲柄滑块机构可以演化成偏心轮机构。
a、曲柄摇杆机构
b、双曲柄机构
c、曲柄摇杆机构
d、双摇杆机构
2.通过选用不同构件为机架而演化成的四杆机构
(1)在铰链四杆机构中:
3.通过选用不同构件为机架而演化成的四杆机构
当构件2做整周转动时,导杆4也做整周回转,该机构称为转动导杆机构;当构件2做整周转动时,导杆只能往复摆动,称为摆动导杆机构。
(1)取构件1为机架,可得到导杆机构。
曲柄滑块机构中:
转动导杆机构
摆动导杆机构
简易刨床的主运动机构
转动导杆机构的应用
牛头刨床的主运动机构
摆动导杆机构的应用
曲柄摇块机构
当曲柄滑块机构中取构件2为机架时,可转化为曲柄摇块机构。
(2)摇块机构
曲柄滑块机构
自卸卡车翻斗机构
曲柄摇块机构应用
当曲柄滑块机构中取滑块3为机架时,即可转化为移动导杆机构。
(3)移动导杆机构
应用: 手动压水机
移动导杆机构
曲柄滑块机构
手动压水机构
移动导杆机构应用
2.5 凸轮机构和棘轮机构
棘轮机构-主动件的连续往复摆动转换为棘
轮的单向间歇运动
制动爪
主动件
摇杆
驱动棘爪
棘轮
弹簧
齿式内棘轮机构
一、齿式棘轮机构
单动式
齿式外棘轮机构
总目录
本章
上页
下页
双动式
可变向式
结构简单,运动可靠; 主从动关系可互换,动程可在较大范围内调节,动停时间比可通过选择合适的驱动机构实现。
优点
缺点
动程只能有级调节;有噪声、冲击、磨损,不宜用于高速场合。
齿式棘轮机构特点
二、摩擦式棘轮机构
传动平稳、无噪音,传递扭矩较大,动程可无级调节。
优点
缺点
摩擦式棘轮机构特点
由于靠摩擦力传动,会出现打滑现象,一方面起到过载保护,另一方面也使传动精度降低。
适用于低速轻载的场合。
三 棘轮机构的应用
凸轮式间歇运动机构运转可靠、转位精确、无需专门的定位装置,但凸轮式间歇运动机构精度要求较高、加工比较复杂、安装调整比较困难。
凸轮式间歇运动机构在轻工机械、冲压机械等高速机械中常用作高速、高精度的步进进给、分度转位等机构。
凸轮式间歇运动机构的特点
应用
四. 凸轮式间歇机构
应用
弧面凸轮式间歇运动机构
总 结
1、铰链四杆机构的基本类型、应用
2、铰链四杆机构的演化
3、平面四杆机构的几个工作特性
(1)曲柄存在的条件
(2)压力角和传动角
(3)急回特性
(4)死点位置
1、对于铰链四杆机构,当满足构件长度和条件时,若取( D )为机架,将得到曲柄摇杆机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D.与最短杆相邻的构件
2、曲柄摇杆机构,当( D )时,机构处于死点位置。
A.曲柄为原动件、曲柄与机架共线
B.曲柄为原动件、曲柄与连杆共线
C.摇杆为原动件、曲柄与机架共线
D.摇杆为原动件、曲柄与连杆共线
3、在曲柄摇杆机构中,当曲柄为原动件时,(C )死点位置。
A. 有一个 B. 没有 C. 有两个 D. 有三个
复习思考题
4、 对于铰链四杆机构,当满足杆长之和的条件时,若取( A )为机架,将得到双曲柄机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D. 与最短杆相邻的构件
5、曲柄摇杆机构,摇杆为原动件当( B )时,机构处于极限位置。
A.曲柄与机架共线 B.曲柄与连杆共线
C.摇杆与机架共线 D.摇杆与连杆共线
6、对于铰链四杆机构,当从动件的行程速比系数(B )时,机构必有急回特性。
A.K>0 B.K>1 C.K<1 D.K=1
7、对于铰链四杆机构,当满足杆长之和的条件时,若取( B )为机架,将得到双摇杆机构。
A.最短杆 B.与最短杆相对的构件 C.最长杆
D.与最短杆相邻的构件
8.铰链四杆机构中,a=60mm,b=150mm,c=120mm,d=100mm。
(1) 以a杆为机架得(双曲柄)机构;
(2) 以b杆为机架得(双摇杆)机构
(3) 以c杆为机架得(双摇杆)机构
(4) 以d杆为机架得(曲摇杆)机构
9、连杆机构中的急回特性是什么含义?什么条件下机构才具有急回特性?
10、铰链四杆机构中曲柄存在的条件是什么?曲柄是否一定是最短杆?
11、如何依照各杆长度判别铰链四杆机构的型式?
12、平面四连杆机构最基本形态是什么?由它演化为其它平面四杆机构,有哪些具体途径?
13、何谓连杆机构的死点?举出避免死点和利用死点的例子。