探究杠杆平衡的条件 教案 (7)
图片预览
文档简介
探究杠杆平衡的条件
教案
教学目标:
(一)知识与技能
1、知道什么是杠杆;认识杠杆的五要素;
2、理解力臂的概念,会画杠杆的力臂;
3、理解杠杆的平衡条件,并能用来解决简单的杠杆平衡问题;
4、能从常见工具中识别出杠杆。
(二)过程与方法
通过实验探究,培养学生的观察、实验、分析问题的能力和归纳概括的能力。
(三)情感、态度与价值观
1、通过对实验的探究培养学生严谨的、实事求是的科学态度;
2、培养学生集体合作的精神。
教学重点:
杠杆力臂的画法;
杠杆的平衡条件。
教学难点:
杠杆力臂的画法。
教学用具:
演示用:各种生活中的工具、杠杆平衡实验装置一套。
学生用:各种生活中的工具;杠杆和支架、钩码、线、弹簧测力计(共16组)
教学设计:
一、新课的引入
教师活动
目的
学生活动
目的
展示图片,各种生活中的工具
介绍各种机械,且再复杂的机械都属于简单机械。
观看
认识生活中的各种机械。
第十章
机械与人机械一般可以分为:杠杆、滑轮和轮轴。板书:第一节
科学探究
杠杆平衡条件
引入新课
二、新课教学
一、认识杠杆
学生使用各种生活中的杠杆。
1、观察杠杆是如何工作的;2、归纳总结出:杠杆的概念
板书:
1、杠杆定义:在力的作用下能绕着固定的点转动硬棒叫杠杆。
师生共同完成
1、手臂是如何抬起的;摇头,弯腰、垫脚尖。2、寻找教室中的杠杆。
1、认识各种杠杆;2、让学生发现我们周围的各种杠杆,感受物理无处不在,激发学生学习的兴趣。
1、观看课件:撬棍是如何撬动石块的;2、实验:如何把拖把撬起来。
指导学生了解杠杆的五要素。
观看
认识杠杆的五要素。
指导学生在教材图10-2(a)所示的图片中练习杠杆的五要素。
1、通过教师讲解作图要领;2、再利用电脑模拟画动力臂和阻力臂的过程。为了突破这一难点,教师采用的是直观教学示范画图的方法,让学生学会画动力臂和阻力臂。
学生练习
1、进一步认识杠杆的五要素;2、学会画力臂。
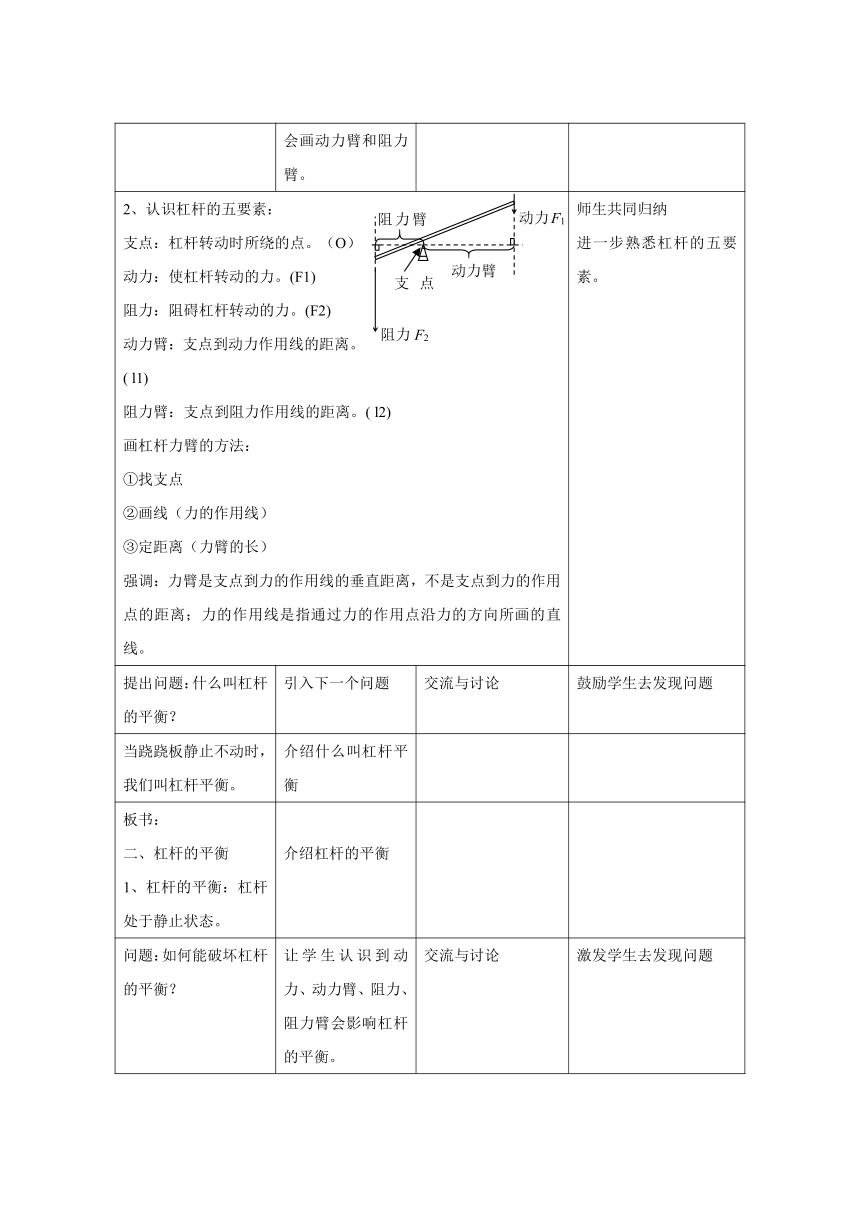
2、认识杠杆的五要素:支点:杠杆转动时所绕的点。(O)动力:使杠杆转动的力。(F1)阻力:阻碍杠杆转动的力。(F2)动力臂:支点到动力作用线的距离。(
l1)阻力臂:支点到阻力作用线的距离。(
l2)画杠杆力臂的方法:①找支点
②画线(力的作用线)③定距离(力臂的长)强调:力臂是支点到力的作用线的垂直距离,不是支点到力的作用点的距离;力的作用线是指通过力的作用点沿力的方向所画的直线。
师生共同归纳进一步熟悉杠杆的五要素。
提出问题:什么叫杠杆的平衡?
引入下一个问题
交流与讨论
鼓励学生去发现问题
当跷跷板静止不动时,我们叫杠杆平衡。
介绍什么叫杠杆平衡
板书:二、杠杆的平衡1、杠杆的平衡:杠杆处于静止状态。
介绍杠杆的平衡
问题:如何能破坏杠杆的平衡?
让学生认识到动力、动力臂、阻力、阻力臂会影响杠杆的平衡。
交流与讨论
激发学生去发现问题
问题:动力、动力臂、阻力、阻力臂对杠杆的平衡会有什么影响?
引入下一个课题
2、实验探究:“杠杆的平衡条件”
(1)提出问题杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的关系呢?
引导学生去发现问题
(2)猜想与假设(3)制定计划与设计实验(4)学生分组进行实验与收集证据
激发学生学习的兴趣
学生分组实验:进行实验并记录数据序号动力F1/N动力臂L1/m阻力F2/N阻力臂L2/m123
1、通过实验探究,培养学生的观察、实验、分析问题的能力和归纳概括的能力。2、通过对实验的探究培养学生严谨的、实事求是的科学态度;3、培养学生集体合作的精神。
指导学生:改变钩码数目(F1、F2),移动其悬挂的位置,使杠杆平衡,将数据填入表格。
指导,学生顺利完成实验
学生进行实验
(5)分析实验数据与验证猜想
师生共同完成
(6)评估、交流与合作
1、学会交流与合作;2、学会发现问题;3、学会解决问题。
(7)实验拓展:
学生通过实验探究,再次从中去发现问题;知道在今后的实验中应该如何进行实验探究。
三、课堂小结:回顾本节所学内容。
由学生归纳总结。
四、课堂练习:
五、布置作业名师测控:P55--56
六、板书:
第一节
科学探究
杠杆的平衡条件
杠杆
定义:
杠杆的五要素:
杠杆的平衡条件:
F1·L1
=
F2·L2
七、教学反思:
优点:
1、课堂气氛活跃,学生学习兴趣高涨,把课堂还给了学生;
2、学生尽可能的主动参与到课堂教学中;
3、内容充实,把科学探究的七个环节充分得到体现;学习效率高
4、培养了学生的实验操作能力、分析问题、处理问题的能力。
缺点:
1、学生对实验交流与讨论时间不足;
2、学生没有练习时间。
建议:平时加强训练学生的实验操作技能和操作速度,使课堂更加高效。
阻力臂l2
动力臂l1
阻力F2
动力F1
支点O
阻力臂l2
动力臂l1
阻力F2
动力F1
支点O
教案
教学目标:
(一)知识与技能
1、知道什么是杠杆;认识杠杆的五要素;
2、理解力臂的概念,会画杠杆的力臂;
3、理解杠杆的平衡条件,并能用来解决简单的杠杆平衡问题;
4、能从常见工具中识别出杠杆。
(二)过程与方法
通过实验探究,培养学生的观察、实验、分析问题的能力和归纳概括的能力。
(三)情感、态度与价值观
1、通过对实验的探究培养学生严谨的、实事求是的科学态度;
2、培养学生集体合作的精神。
教学重点:
杠杆力臂的画法;
杠杆的平衡条件。
教学难点:
杠杆力臂的画法。
教学用具:
演示用:各种生活中的工具、杠杆平衡实验装置一套。
学生用:各种生活中的工具;杠杆和支架、钩码、线、弹簧测力计(共16组)
教学设计:
一、新课的引入
教师活动
目的
学生活动
目的
展示图片,各种生活中的工具
介绍各种机械,且再复杂的机械都属于简单机械。
观看
认识生活中的各种机械。
第十章
机械与人机械一般可以分为:杠杆、滑轮和轮轴。板书:第一节
科学探究
杠杆平衡条件
引入新课
二、新课教学
一、认识杠杆
学生使用各种生活中的杠杆。
1、观察杠杆是如何工作的;2、归纳总结出:杠杆的概念
板书:
1、杠杆定义:在力的作用下能绕着固定的点转动硬棒叫杠杆。
师生共同完成
1、手臂是如何抬起的;摇头,弯腰、垫脚尖。2、寻找教室中的杠杆。
1、认识各种杠杆;2、让学生发现我们周围的各种杠杆,感受物理无处不在,激发学生学习的兴趣。
1、观看课件:撬棍是如何撬动石块的;2、实验:如何把拖把撬起来。
指导学生了解杠杆的五要素。
观看
认识杠杆的五要素。
指导学生在教材图10-2(a)所示的图片中练习杠杆的五要素。
1、通过教师讲解作图要领;2、再利用电脑模拟画动力臂和阻力臂的过程。为了突破这一难点,教师采用的是直观教学示范画图的方法,让学生学会画动力臂和阻力臂。
学生练习
1、进一步认识杠杆的五要素;2、学会画力臂。
2、认识杠杆的五要素:支点:杠杆转动时所绕的点。(O)动力:使杠杆转动的力。(F1)阻力:阻碍杠杆转动的力。(F2)动力臂:支点到动力作用线的距离。(
l1)阻力臂:支点到阻力作用线的距离。(
l2)画杠杆力臂的方法:①找支点
②画线(力的作用线)③定距离(力臂的长)强调:力臂是支点到力的作用线的垂直距离,不是支点到力的作用点的距离;力的作用线是指通过力的作用点沿力的方向所画的直线。
师生共同归纳进一步熟悉杠杆的五要素。
提出问题:什么叫杠杆的平衡?
引入下一个问题
交流与讨论
鼓励学生去发现问题
当跷跷板静止不动时,我们叫杠杆平衡。
介绍什么叫杠杆平衡
板书:二、杠杆的平衡1、杠杆的平衡:杠杆处于静止状态。
介绍杠杆的平衡
问题:如何能破坏杠杆的平衡?
让学生认识到动力、动力臂、阻力、阻力臂会影响杠杆的平衡。
交流与讨论
激发学生去发现问题
问题:动力、动力臂、阻力、阻力臂对杠杆的平衡会有什么影响?
引入下一个课题
2、实验探究:“杠杆的平衡条件”
(1)提出问题杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在怎样的关系呢?
引导学生去发现问题
(2)猜想与假设(3)制定计划与设计实验(4)学生分组进行实验与收集证据
激发学生学习的兴趣
学生分组实验:进行实验并记录数据序号动力F1/N动力臂L1/m阻力F2/N阻力臂L2/m123
1、通过实验探究,培养学生的观察、实验、分析问题的能力和归纳概括的能力。2、通过对实验的探究培养学生严谨的、实事求是的科学态度;3、培养学生集体合作的精神。
指导学生:改变钩码数目(F1、F2),移动其悬挂的位置,使杠杆平衡,将数据填入表格。
指导,学生顺利完成实验
学生进行实验
(5)分析实验数据与验证猜想
师生共同完成
(6)评估、交流与合作
1、学会交流与合作;2、学会发现问题;3、学会解决问题。
(7)实验拓展:
学生通过实验探究,再次从中去发现问题;知道在今后的实验中应该如何进行实验探究。
三、课堂小结:回顾本节所学内容。
由学生归纳总结。
四、课堂练习:
五、布置作业名师测控:P55--56
六、板书:
第一节
科学探究
杠杆的平衡条件
杠杆
定义:
杠杆的五要素:
杠杆的平衡条件:
F1·L1
=
F2·L2
七、教学反思:
优点:
1、课堂气氛活跃,学生学习兴趣高涨,把课堂还给了学生;
2、学生尽可能的主动参与到课堂教学中;
3、内容充实,把科学探究的七个环节充分得到体现;学习效率高
4、培养了学生的实验操作能力、分析问题、处理问题的能力。
缺点:
1、学生对实验交流与讨论时间不足;
2、学生没有练习时间。
建议:平时加强训练学生的实验操作技能和操作速度,使课堂更加高效。
阻力臂l2
动力臂l1
阻力F2
动力F1
支点O
阻力臂l2
动力臂l1
阻力F2
动力F1
支点O