第4课 聪明的巡逻兵 课件
文档属性
| 名称 | 第4课 聪明的巡逻兵 课件 |

|
|
| 格式 | zip | ||
| 文件大小 | 436.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2016-11-18 00:00:00 | ||
图片预览



文档简介
课件21张PPT。
聪明的巡逻兵聪明的巡逻兵学习目标:
1.学会运用流程控制库中的多次循环模
块编写程序
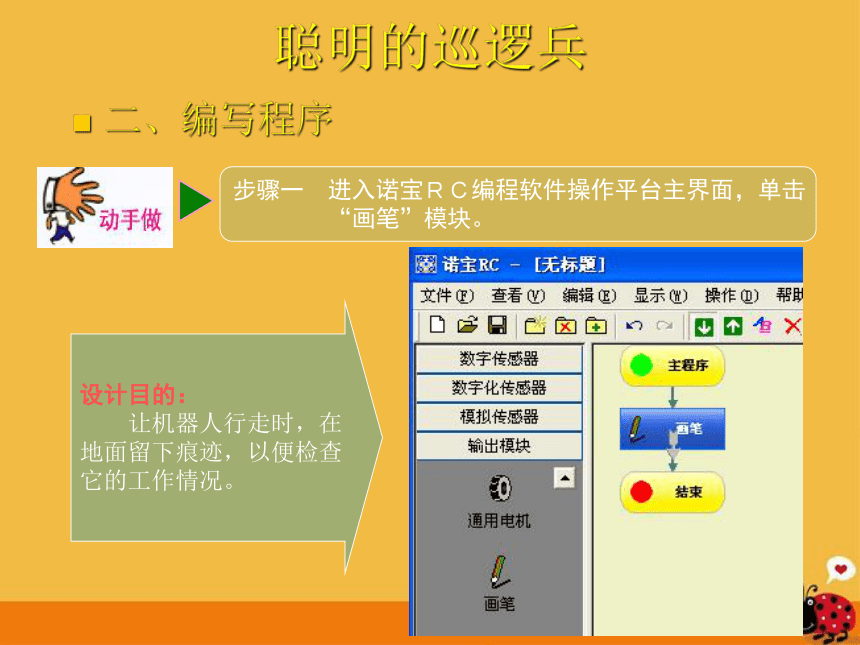
2.了解编程中的循环结构聪明的巡逻兵任务: 我们都知道,不论是解数学题还是处理生活中遇到的问题,往往会有不同的方案。怎样找出最有效、最便捷的方案呢?这就需要多动脑子,综合运用各种知识。现在让我们想想,能不能为机器人巡逻警察设计一段更简洁的控制程序呢? 聪明的巡逻兵一、任务分析 在上一课的任务分析中,我们已知道正方形操场的四边的长度是相等的,四个转角也是相等的。那么,只要机器人按一组行动要求重复四次,就可以完成任务。怎样使程序更简单呢?下面我一起来让巡逻警察变得更聪明。 聪明的巡逻兵二、编写程序步骤一 进入诺宝RC编程软件操作平台主界面,单击
“画笔”模块。设计目的:
让机器人行走时,在
地面留下痕迹,以便检查
它的工作情况。聪明的巡逻兵二、编写程序步骤二:双击“画笔”框,选择“下落”,然后按确定键。 设计目的:
这一步目的是让画笔
接地,开始记录痕迹。聪明的巡逻兵二、编写程序步骤三: 选择“时间模块”中“秒级延时”模块,单击。设计目的:
使画笔能够下落到地
面上。聪明的巡逻兵二、编写程序步骤四: 双击“秒级延时”框,设置时间为0.1秒。(具体
时间根据画笔实际安装位置决定)设计目的:
让画笔正好落在地面,
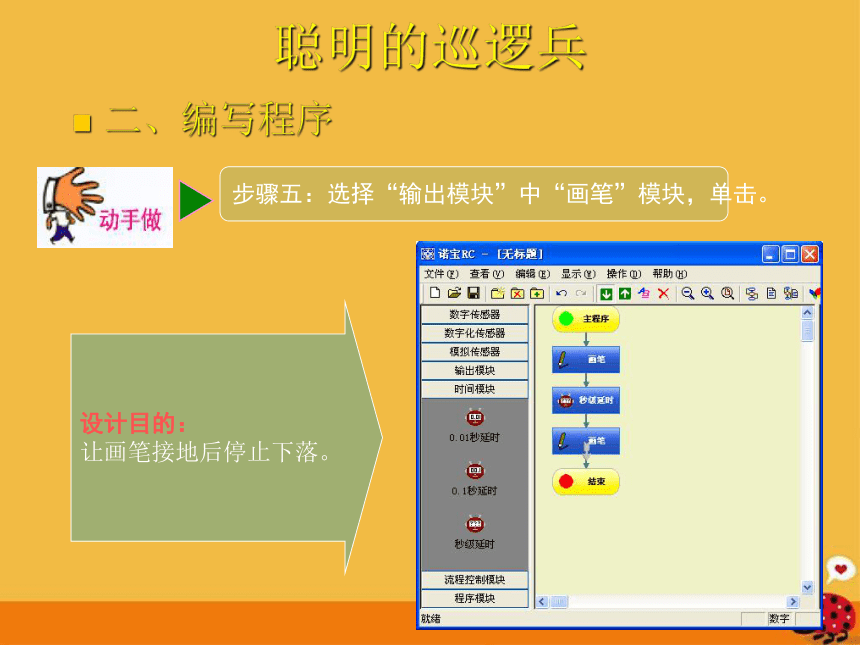
准备记录机器人的痕迹。聪明的巡逻兵二、编写程序步骤五:选择“输出模块”中“画笔”模块,单击。 设计目的:
让画笔接地后停止下落。聪明的巡逻兵二、编写程序步骤六:双击“画笔”框,选择“停止”,然后按“确定”键设计目的:
让画笔停在接地位置
后停止继续下落。 聪明的巡逻兵二、编写程序步骤七:选择“流程控制模块”库中的“多次循环”模块,
单击。 设计目的:
在程序中建立重复命令。 聪明的巡逻兵二、编写程序步骤八:双击“多次循环”框,将循环10次,改为4次,
然后按确定键。设计目的:
重复4次命令。 聪明的巡逻兵二、编写程序步骤九:选择“输出模块”库中的中的“直行”模块,
单击。设计目的:
让机器人沿一侧围墙
前进。聪明的巡逻兵二、编写程序步骤十:双“击直”行框,将执行速度10,改为2,然后
按确定键。 设计目的:
让机器人别走得太
快,慢慢巡视。聪明的巡逻兵二、编写程序步骤十一:选择“输出模块”库中的“转向”模块,单击。 设计目的:
让机器人转个弯,
继续沿围墙前进。 聪明的巡逻兵二、编写程序步骤十二:双击“转向”框,检查转动角度是否90度,
然后按确定键。设计目的:
避免机器人转弯的角
度过大或过小,巡视不
周到。 聪明的巡逻兵 右图是让机器人在操场上巡
逻的程序流程图。 与第七课的巡逻程序相比,本课的程序有什么特点?哪几个步骤相同,哪几个步骤不同?为什么要这样设计呢?说说想想聪明的巡逻兵三、进入仿真平台 在诺宝RC编程软件中的仿真平台上测试一下,看仿真机器人是否能够听懂指令,同时也检验我们的指令是否正确。 上面的程序结构中包含着循环结构。利用循环结构,可以方便快捷地编写程序,绘制正三边形、正五边形,甚至还可以绘制圆形的图案。一点通聪明的巡逻兵练一练 动动手,互相合作,编
写绘制正三边形、正五边行
、正八边形、正九边行和圆
形图案的程序。小资料 角的计算方法 在编写程序时可以结合所学到的
一些数学知识。
画正三边形时,外角的计算方法
是:360°÷ 3(边数)= 120°。
画正N边形时,外角的计算方法是:
360°÷ N (边数) 。
谢谢
聪明的巡逻兵聪明的巡逻兵学习目标:
1.学会运用流程控制库中的多次循环模
块编写程序
2.了解编程中的循环结构聪明的巡逻兵任务: 我们都知道,不论是解数学题还是处理生活中遇到的问题,往往会有不同的方案。怎样找出最有效、最便捷的方案呢?这就需要多动脑子,综合运用各种知识。现在让我们想想,能不能为机器人巡逻警察设计一段更简洁的控制程序呢? 聪明的巡逻兵一、任务分析 在上一课的任务分析中,我们已知道正方形操场的四边的长度是相等的,四个转角也是相等的。那么,只要机器人按一组行动要求重复四次,就可以完成任务。怎样使程序更简单呢?下面我一起来让巡逻警察变得更聪明。 聪明的巡逻兵二、编写程序步骤一 进入诺宝RC编程软件操作平台主界面,单击
“画笔”模块。设计目的:
让机器人行走时,在
地面留下痕迹,以便检查
它的工作情况。聪明的巡逻兵二、编写程序步骤二:双击“画笔”框,选择“下落”,然后按确定键。 设计目的:
这一步目的是让画笔
接地,开始记录痕迹。聪明的巡逻兵二、编写程序步骤三: 选择“时间模块”中“秒级延时”模块,单击。设计目的:
使画笔能够下落到地
面上。聪明的巡逻兵二、编写程序步骤四: 双击“秒级延时”框,设置时间为0.1秒。(具体
时间根据画笔实际安装位置决定)设计目的:
让画笔正好落在地面,
准备记录机器人的痕迹。聪明的巡逻兵二、编写程序步骤五:选择“输出模块”中“画笔”模块,单击。 设计目的:
让画笔接地后停止下落。聪明的巡逻兵二、编写程序步骤六:双击“画笔”框,选择“停止”,然后按“确定”键设计目的:
让画笔停在接地位置
后停止继续下落。 聪明的巡逻兵二、编写程序步骤七:选择“流程控制模块”库中的“多次循环”模块,
单击。 设计目的:
在程序中建立重复命令。 聪明的巡逻兵二、编写程序步骤八:双击“多次循环”框,将循环10次,改为4次,
然后按确定键。设计目的:
重复4次命令。 聪明的巡逻兵二、编写程序步骤九:选择“输出模块”库中的中的“直行”模块,
单击。设计目的:
让机器人沿一侧围墙
前进。聪明的巡逻兵二、编写程序步骤十:双“击直”行框,将执行速度10,改为2,然后
按确定键。 设计目的:
让机器人别走得太
快,慢慢巡视。聪明的巡逻兵二、编写程序步骤十一:选择“输出模块”库中的“转向”模块,单击。 设计目的:
让机器人转个弯,
继续沿围墙前进。 聪明的巡逻兵二、编写程序步骤十二:双击“转向”框,检查转动角度是否90度,
然后按确定键。设计目的:
避免机器人转弯的角
度过大或过小,巡视不
周到。 聪明的巡逻兵 右图是让机器人在操场上巡
逻的程序流程图。 与第七课的巡逻程序相比,本课的程序有什么特点?哪几个步骤相同,哪几个步骤不同?为什么要这样设计呢?说说想想聪明的巡逻兵三、进入仿真平台 在诺宝RC编程软件中的仿真平台上测试一下,看仿真机器人是否能够听懂指令,同时也检验我们的指令是否正确。 上面的程序结构中包含着循环结构。利用循环结构,可以方便快捷地编写程序,绘制正三边形、正五边形,甚至还可以绘制圆形的图案。一点通聪明的巡逻兵练一练 动动手,互相合作,编
写绘制正三边形、正五边行
、正八边形、正九边行和圆
形图案的程序。小资料 角的计算方法 在编写程序时可以结合所学到的
一些数学知识。
画正三边形时,外角的计算方法
是:360°÷ 3(边数)= 120°。
画正N边形时,外角的计算方法是:
360°÷ N (边数) 。
谢谢