第3课 忠实的巡逻兵 课件
文档属性
| 名称 | 第3课 忠实的巡逻兵 课件 |  | |
| 格式 | zip | ||
| 文件大小 | 994.9KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息科技(信息技术) | ||
| 更新时间 | 2016-11-18 15:20:18 | ||
图片预览



文档简介
课件20张PPT。
忠实的巡逻兵忠实的巡逻兵学习目标:
1.学会用输出模块库中的画笔、直行、
转向模块编写程序
2.学会使用仿真界面中的仿真按钮、退
出按钮等
3.学会程序下载
4.了解编程中的顺序结构忠实的巡逻兵任务:
你看见过巡逻的警察叔叔吗?你想帮他们做些事情吗?让我们请机器人帮忙,执行环城巡逻的任务吧!忠实的巡逻兵一、任务分析 机器人要完成在一个正方形的操场上巡逻任务,首先它必须沿着操场的一侧直行至顶端,然后转90度角,我们将机器人直行然后转90度角,看作是一组行动。由于正方形操场的四条边长是相等的,四个转角也是相等的。只要机器人按一组行动要求重复4次,就可以完成任务。 忠实的巡逻兵二、编写程序让我们打开诺宝RC编程软件操作平台,用流程图程序语言开始编程。步骤一 进入诺宝RC编程软件操作平台主界面,选择
“输出模块”库中的画笔模块,单击。设计目的:
让机器人行走时,在
地面留下痕迹,以便检查
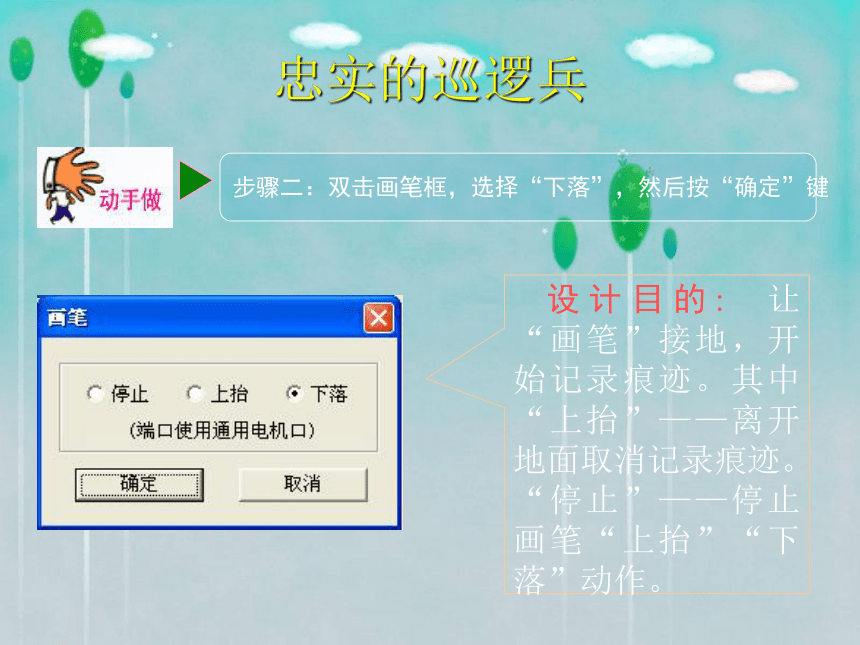
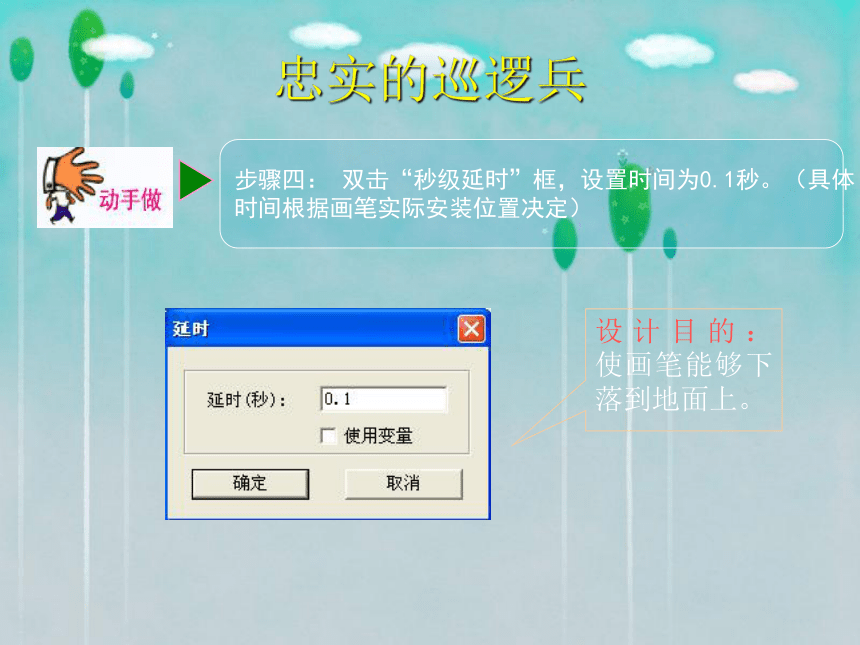
它的工作情况。忠实的巡逻兵步骤二:双击画笔框,选择“下落”,然后按“确定”键 设计目的: 让“画笔”接地,开始记录痕迹。其中“上抬”——离开地面取消记录痕迹。“停止”——停止画笔“上抬”“下落”动作。忠实的巡逻兵步骤三: 选择“时间模块”中“秒级延时”模块,单击。 设计目的: 使画笔能够下落到地面上。忠实的巡逻兵步骤四: 双击“秒级延时”框,设置时间为0.1秒。(具体
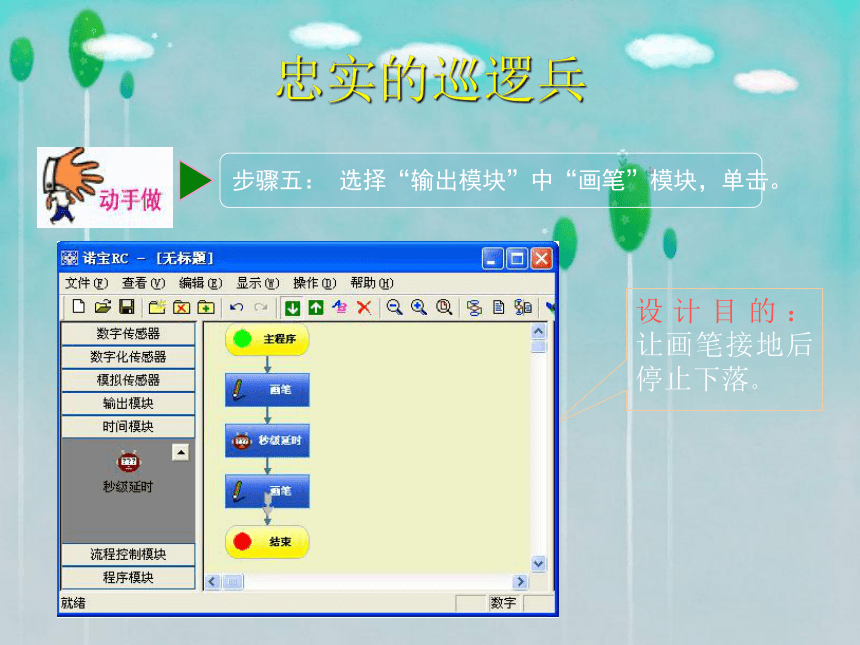
时间根据画笔实际安装位置决定)设计目的: 使画笔能够下落到地面上。忠实的巡逻兵步骤五: 选择“输出模块”中“画笔”模块,单击。设计目的: 让画笔接地后停止下落。忠实的巡逻兵步骤六:双击“画笔”框,选择“停止”,然后按“确定”键设计目的:让画笔停在接地位置后停止继续下落。忠实的巡逻兵步骤七:选择“输出模块”库中的“直行”模块,单击。设计目的:让机器人沿一侧围墙前进。忠实的巡逻兵步骤八:双击“直行”框,将直行速度10改为2,然后按
确定键。 设计目的:让机器人不要走得太快,慢慢巡视。忠实的巡逻兵步骤九:选择“输出模块”库中的“转向”模块,单击。设计目的:让机器人转弯,继续沿一侧围墙前进。忠实的巡逻兵步骤十:双击“转向”框,检查转动角度是否90度,
然后按确定键。 设计目的: 避免机器人转弯的角度过大或过小,巡视不周到。忠实的巡逻兵 以下的各部按次序重复上述“直行”与“转向”模块3次操作。直至与右图的流程图一样,这样就完成了我们让机器人执行在操场上巡逻的程序流程图。忠实的巡逻兵三、进入仿真平台步骤一 单击主界面工具栏中的“仿真”图标,进入
仿真平台。仿真图标步骤二 单击选择仿真界面工具栏中的“仿真”图标,仿真机器人
便跳出来执行任务了。 仿真机器人的头可以朝向任意方向,它的行动轨迹的颜色也可以任意选择。一点通忠实的巡逻兵四、下载程序 将测试成功的程序下载到自己组装的
机器人上,指挥机器人执行任务。小活动步骤一 单击仿真界面工具栏中的“退出”图标,回到
主界面。步骤二 检查机器人与计算机连接好后,
单击主界面工具栏中的“编译下
载”图标,显示“编译、下载成
功完成!”后,单击“确定”按钮。忠实的巡逻兵练一练小资料 诺宝RC编程软件操作平台 诺宝RC编程软件操作平台,是
一个我们与机器人之间沟通的桥梁。
它简单便捷,可供选择。在用流程
图编写程序的同时,C语言代码也
将同步显示,供参考学习。当程序
编写完成,还可以进行程序的模拟
演示(仿真),也可以立即下载程
序到机器人中,让机器人行动起来。
如果发现程序错误,还可以再使用
这个软件对程序重新进行编辑和修
改。 谢谢
忠实的巡逻兵忠实的巡逻兵学习目标:
1.学会用输出模块库中的画笔、直行、
转向模块编写程序
2.学会使用仿真界面中的仿真按钮、退
出按钮等
3.学会程序下载
4.了解编程中的顺序结构忠实的巡逻兵任务:
你看见过巡逻的警察叔叔吗?你想帮他们做些事情吗?让我们请机器人帮忙,执行环城巡逻的任务吧!忠实的巡逻兵一、任务分析 机器人要完成在一个正方形的操场上巡逻任务,首先它必须沿着操场的一侧直行至顶端,然后转90度角,我们将机器人直行然后转90度角,看作是一组行动。由于正方形操场的四条边长是相等的,四个转角也是相等的。只要机器人按一组行动要求重复4次,就可以完成任务。 忠实的巡逻兵二、编写程序让我们打开诺宝RC编程软件操作平台,用流程图程序语言开始编程。步骤一 进入诺宝RC编程软件操作平台主界面,选择
“输出模块”库中的画笔模块,单击。设计目的:
让机器人行走时,在
地面留下痕迹,以便检查
它的工作情况。忠实的巡逻兵步骤二:双击画笔框,选择“下落”,然后按“确定”键 设计目的: 让“画笔”接地,开始记录痕迹。其中“上抬”——离开地面取消记录痕迹。“停止”——停止画笔“上抬”“下落”动作。忠实的巡逻兵步骤三: 选择“时间模块”中“秒级延时”模块,单击。 设计目的: 使画笔能够下落到地面上。忠实的巡逻兵步骤四: 双击“秒级延时”框,设置时间为0.1秒。(具体
时间根据画笔实际安装位置决定)设计目的: 使画笔能够下落到地面上。忠实的巡逻兵步骤五: 选择“输出模块”中“画笔”模块,单击。设计目的: 让画笔接地后停止下落。忠实的巡逻兵步骤六:双击“画笔”框,选择“停止”,然后按“确定”键设计目的:让画笔停在接地位置后停止继续下落。忠实的巡逻兵步骤七:选择“输出模块”库中的“直行”模块,单击。设计目的:让机器人沿一侧围墙前进。忠实的巡逻兵步骤八:双击“直行”框,将直行速度10改为2,然后按
确定键。 设计目的:让机器人不要走得太快,慢慢巡视。忠实的巡逻兵步骤九:选择“输出模块”库中的“转向”模块,单击。设计目的:让机器人转弯,继续沿一侧围墙前进。忠实的巡逻兵步骤十:双击“转向”框,检查转动角度是否90度,
然后按确定键。 设计目的: 避免机器人转弯的角度过大或过小,巡视不周到。忠实的巡逻兵 以下的各部按次序重复上述“直行”与“转向”模块3次操作。直至与右图的流程图一样,这样就完成了我们让机器人执行在操场上巡逻的程序流程图。忠实的巡逻兵三、进入仿真平台步骤一 单击主界面工具栏中的“仿真”图标,进入
仿真平台。仿真图标步骤二 单击选择仿真界面工具栏中的“仿真”图标,仿真机器人
便跳出来执行任务了。 仿真机器人的头可以朝向任意方向,它的行动轨迹的颜色也可以任意选择。一点通忠实的巡逻兵四、下载程序 将测试成功的程序下载到自己组装的
机器人上,指挥机器人执行任务。小活动步骤一 单击仿真界面工具栏中的“退出”图标,回到
主界面。步骤二 检查机器人与计算机连接好后,
单击主界面工具栏中的“编译下
载”图标,显示“编译、下载成
功完成!”后,单击“确定”按钮。忠实的巡逻兵练一练小资料 诺宝RC编程软件操作平台 诺宝RC编程软件操作平台,是
一个我们与机器人之间沟通的桥梁。
它简单便捷,可供选择。在用流程
图编写程序的同时,C语言代码也
将同步显示,供参考学习。当程序
编写完成,还可以进行程序的模拟
演示(仿真),也可以立即下载程
序到机器人中,让机器人行动起来。
如果发现程序错误,还可以再使用
这个软件对程序重新进行编辑和修
改。 谢谢