第4课 聪明的巡逻兵 课件
文档属性
| 名称 | 第4课 聪明的巡逻兵 课件 |
|
|
| 格式 | ppt | ||
| 文件大小 | 840.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2016-12-08 00:00:00 | ||
图片预览
文档简介
(共16张PPT)
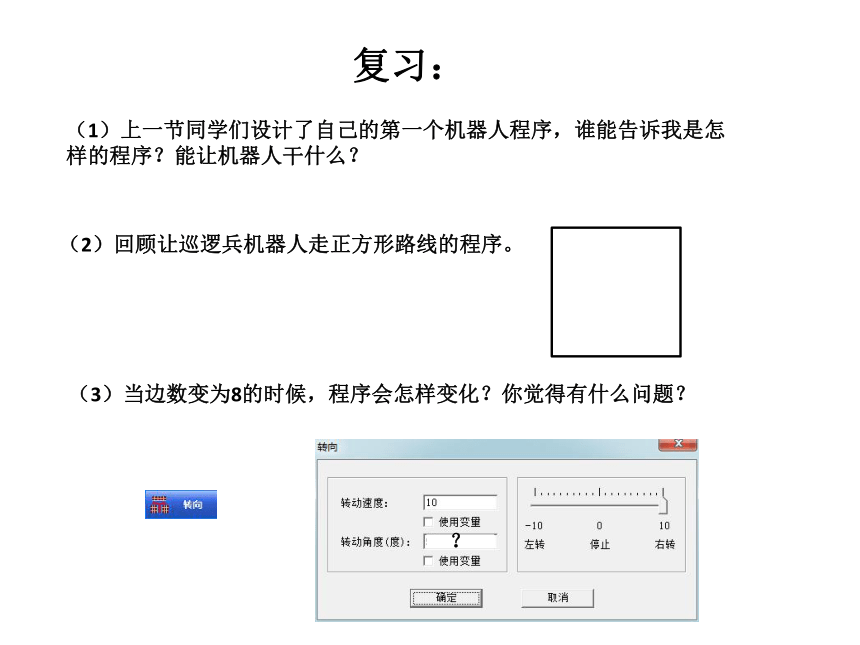
复习:
(1)上一节同学们设计了自己的第一个机器人程序,谁能告诉我是怎样的程序?能让机器人干什么?
(2)回顾让巡逻兵机器人走正方形路线的程序。
(3)当边数变为8的时候,程序会怎样变化?你觉得有什么问题?
?
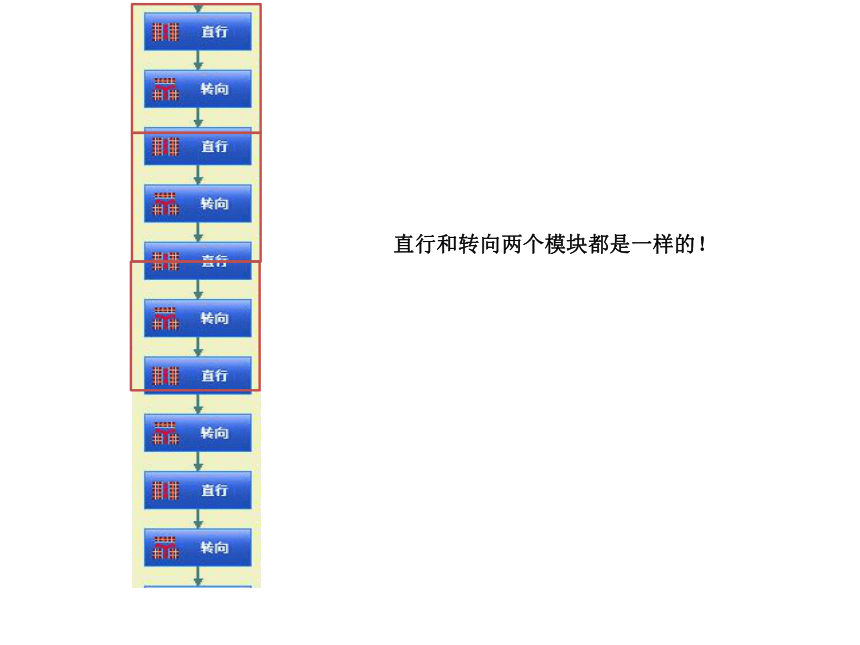
直行和转向两个模块都是一样的!
需要重复做的部分
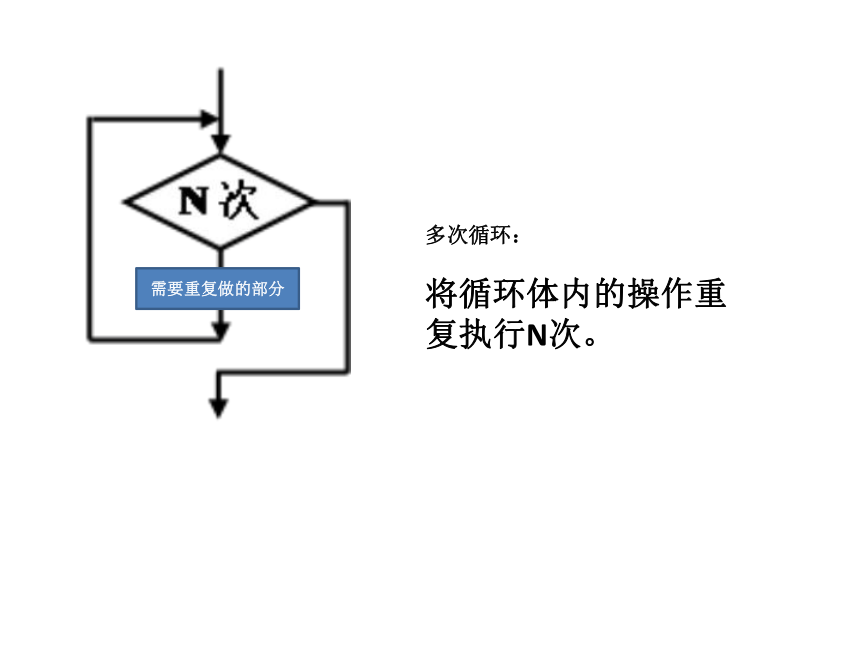
多次循环:
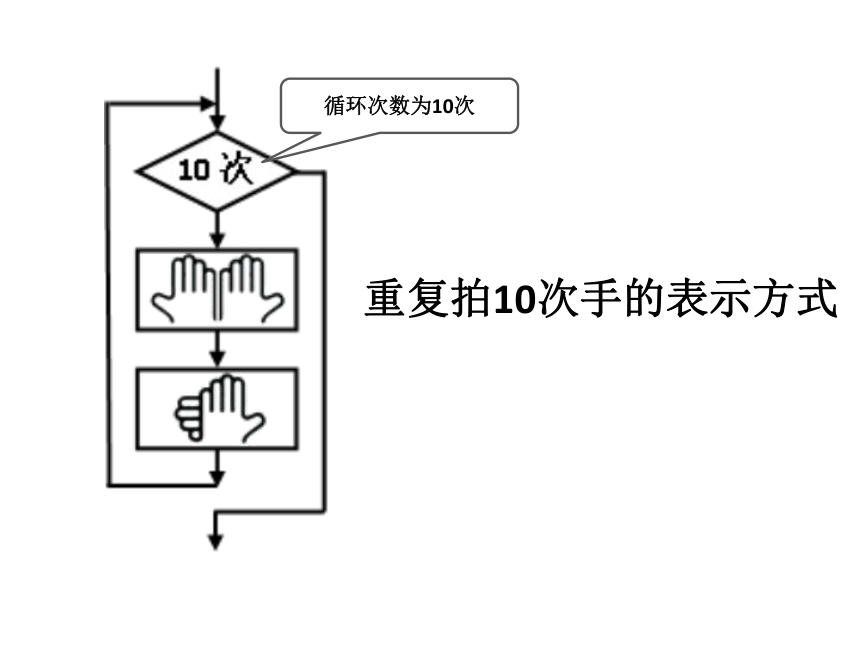
将循环体内的操作重复执行N次。
重复拍10次手的表示方式
循环次数为10次
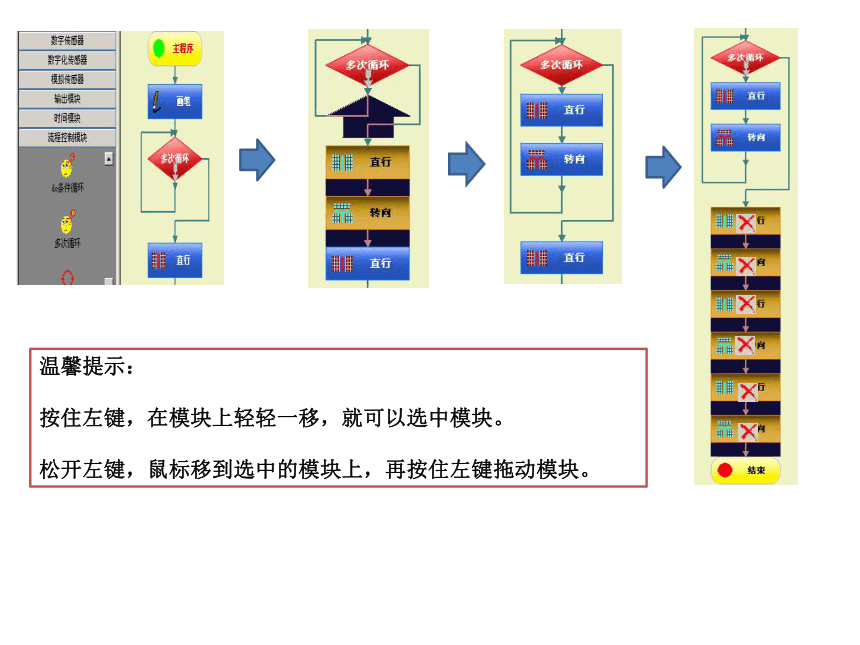
温馨提示:
按住左键,在模块上轻轻一移,就可以选中模块。
松开左键,鼠标移到选中的模块上,再按住左键拖动模块。
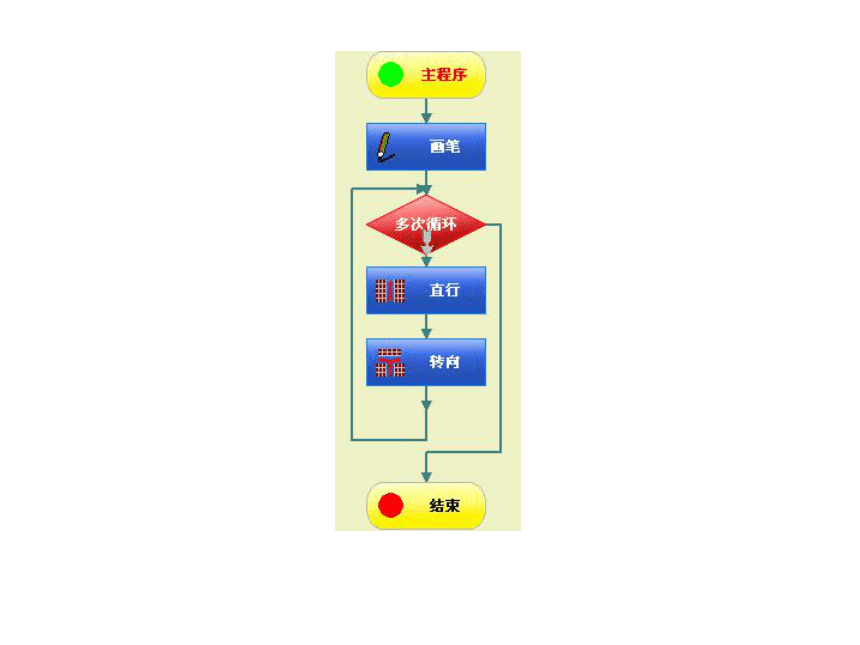
任务一
把机器人走正方形路线的程序改为多次循环模式。
小组讨论,如何在修改好的程序基础上,把正方形路线改为三角形路线。
时间,5分钟。
边数与转角的关系
转角=360°÷边数
图形 边数 转角
正三角形 3 120°
正方形 4 90°
正五边形 5
正六边形 6
正八边形 8 45°
正九边形 9
正十二边形 12
72°
60°
40°
30°
任务二
选一个边数大于8的多边形,看哪个小组做的越多又快。
做的过程中你遇到什么问题?
小组讨论,遇到这样的问题是因为什么原因?怎么解决?
边数越来越多,细心观察图形会怎么变化?
画一个正三角形
循环3次
右转120°
转角=
360°÷循坏次数
(多边形个数)
转角=
360°÷循坏次数
(多边形边数)
任务三
试试把三个三角形变为三个正五边形或三个其他正多边形。
你能修改为更多的正多边形围在一起的风车吗?
设计过程中你遇到什么问题?
总结
1. 我们今天学习了一个什么新的内容?它有什么作用?
2. 你们怎么评价自己的学习成果?
3. 你们怎么评价小组成员的学习成果。
4.回家后展示给家长看学到的本领。
复习:
(1)上一节同学们设计了自己的第一个机器人程序,谁能告诉我是怎样的程序?能让机器人干什么?
(2)回顾让巡逻兵机器人走正方形路线的程序。
(3)当边数变为8的时候,程序会怎样变化?你觉得有什么问题?
?
直行和转向两个模块都是一样的!
需要重复做的部分
多次循环:
将循环体内的操作重复执行N次。
重复拍10次手的表示方式
循环次数为10次
温馨提示:
按住左键,在模块上轻轻一移,就可以选中模块。
松开左键,鼠标移到选中的模块上,再按住左键拖动模块。
任务一
把机器人走正方形路线的程序改为多次循环模式。
小组讨论,如何在修改好的程序基础上,把正方形路线改为三角形路线。
时间,5分钟。
边数与转角的关系
转角=360°÷边数
图形 边数 转角
正三角形 3 120°
正方形 4 90°
正五边形 5
正六边形 6
正八边形 8 45°
正九边形 9
正十二边形 12
72°
60°
40°
30°
任务二
选一个边数大于8的多边形,看哪个小组做的越多又快。
做的过程中你遇到什么问题?
小组讨论,遇到这样的问题是因为什么原因?怎么解决?
边数越来越多,细心观察图形会怎么变化?
画一个正三角形
循环3次
右转120°
转角=
360°÷循坏次数
(多边形个数)
转角=
360°÷循坏次数
(多边形边数)
任务三
试试把三个三角形变为三个正五边形或三个其他正多边形。
你能修改为更多的正多边形围在一起的风车吗?
设计过程中你遇到什么问题?
总结
1. 我们今天学习了一个什么新的内容?它有什么作用?
2. 你们怎么评价自己的学习成果?
3. 你们怎么评价小组成员的学习成果。
4.回家后展示给家长看学到的本领。