15 机器人灭火 课件(31张PPT)
文档属性
| 名称 | 15 机器人灭火 课件(31张PPT) |

|
|
| 格式 | zip | ||
| 文件大小 | 834.9KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2020-08-31 00:00:00 | ||
图片预览



文档简介
课件31张PPT。灭火机器人简介 目录一. 硬件电路设计
二. 控制策略
三. 设计注意事项
四. 可能碰到的问题及相应解答
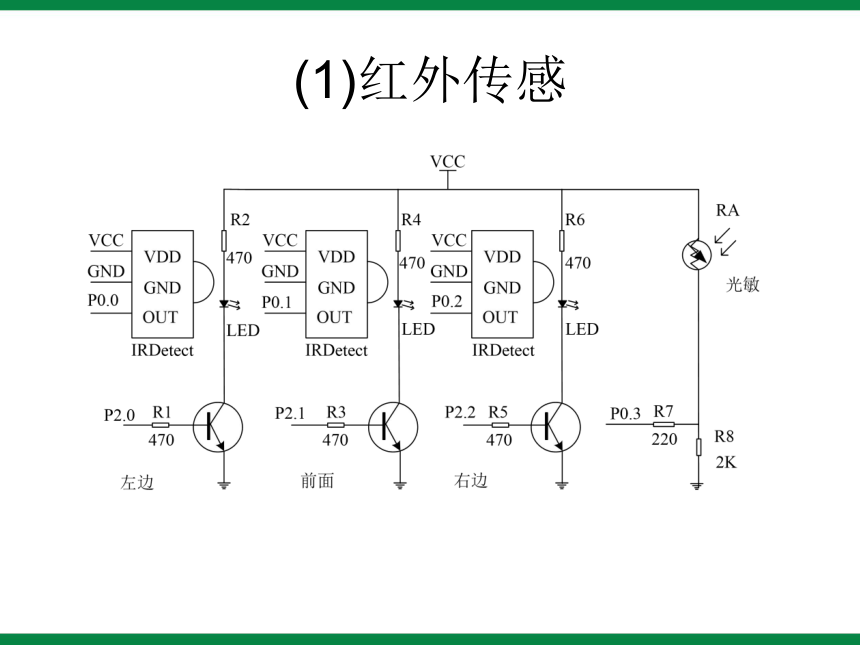
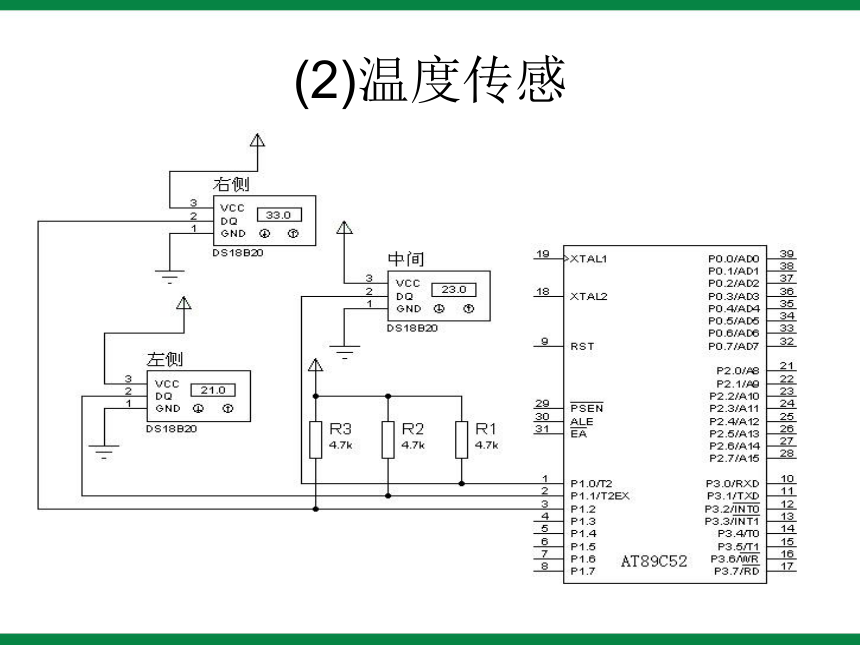
五. 演示与问答近年来,我国石化等基础工业有了飞速的发展,在生产过程中的易燃易爆和剧毒化学制品急剧增长,由于设备和管理方面的原因,导致化学危险品和放射性物质泄漏、燃烧爆炸的事故增多。灭火机器人作为特种消防设备可代替消防队员接近火场实施有效的灭火救援、化学检验和火场侦察。它的应用将提高消防部队扑灭特大恶性火灾的实战能力,对减少国家财产损失和灭火救援人员的伤亡将产生重要的作用。国内消防部队要求研制、配备灭火机器人的呼声越来越高。因此研制灭火机器人,对我国21世纪的消防装备的发展以及消防部队的技战术的拓展将产生重要的影响。 一 硬件设计 灭火机器人的主要硬件部分是温度传感器、电风扇、机器人小车、单片机,硬件设计需要把他们进行合理的连接起来,实现灭火机器人的硬件部分。(1)红外传感(2)温度传感科目一考试 http://km1.jsyst.cn 驾驶员理论考试
科目二考试 http://km2.jsyst.cn 场地考试
科目三考试 http://km3.jsyst.cn 实际道路考试
科目四考试 http://km4.jsyst.cn 安全文明驾驶常识考试
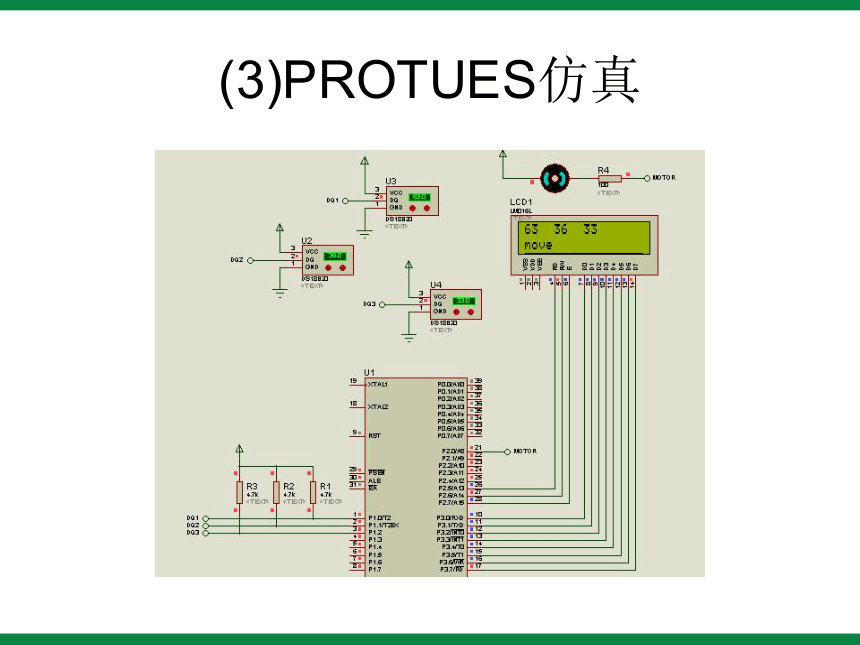
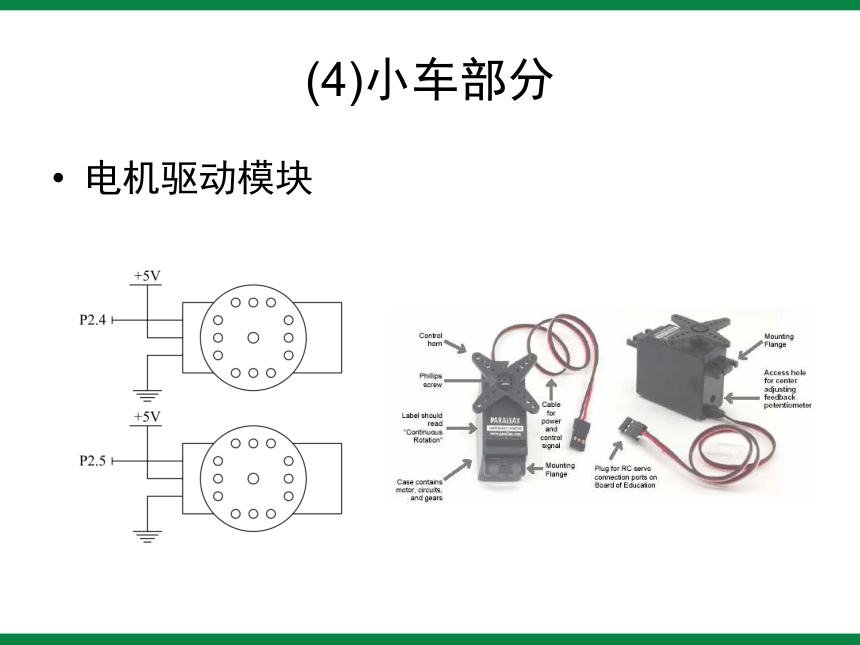
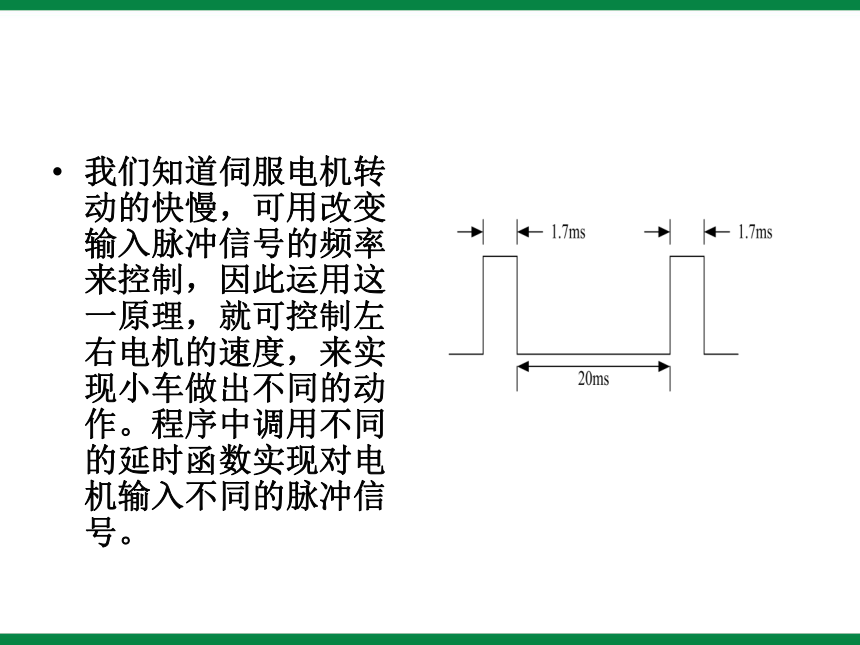
2016年驾驶员试题网学车试题大全(3)PROTUES仿真(4)小车部分电机驱动模块我们知道伺服电机转动的快慢,可用改变输入脉冲信号的频率来控制,因此运用这一原理,就可控制左右电机的速度,来实现小车做出不同的动作。程序中调用不同的延时函数实现对电机输入不同的脉冲信号。 我们知道伺服电机转动的快慢,可用改变输入脉冲信号的频率来控制,因此运用这一原理,就可控制左右电机的速度,来实现小车做出不同的动作。程序中调用不同的延时函数实现对电机输入不同的脉冲信号。 二 灭火机器人算法策略 (1)灭火路径的优化 机器人灭火比赛场地一般采用国际灭火比赛标准场地,场地大小、房间位置、蜡烛家具摆放位置都按一定规则。为了尽快找到火源,可采用各种扩展卡增强机器人导航能力,扩展卡可以购买也可自制。以下是常用的一些导航方案。 a,红外避障引导:机器人自带红外探测器,注意灵敏度的调整。 b,采用机器人编码器进行引导:编码器精度不高,注意左右轮补偿。 c,红外测量距离的引导:利用红外测距,简单可靠,但测距范围有限(10cm~80cm) 实现的方法:首先是寻找火源。如果事先知道火源在哪个房间,可以通过走直线和转弯的方法直接进入房间灭火。如果事先并不知道火源在哪个房间,就要用走迷宫的方法,逐个房间进行寻找。走迷宫可以遵循左手法则或右手法则,一边走迷宫,一边检测火焰。接近蜡烛时,火焰传感器的返回值跟环境值有明显的区别,机器人从而来判断是否找到蜡烛。 顺墙坐标算法
左手定则算法
光敏导航算法 无论是树型迷宫还是网孔型迷宫,要找到一条路径并不难。如果采用“顺墙摸”的办法,肯定可以走出迷宫,但不一定是最短路径。 所谓左手法则就是机器人把左边的墙壁看成是参照物,机器人贴迷宫左侧的墙壁实现行走。
左手定则的基本法则就是:看到墙壁离开墙壁,看不到墙壁,接近墙壁。
灭火实际控制图迷宫演示(2) 火焰定位 火焰定位包括寻找火焰和火焰定位两个部分。 机器人寻找火焰一般采用远红外火焰探头作为探测工具,为了准确、快速地确定火焰位置,可采用多种方式对远红外火焰探头进行改进,以下是常用的一些改装方案。 a,火焰探头的串联和并联:提高探头灵敏度。需要一定的硬件知识。 b,火焰探头的分散和集中:多个火焰探头分布在机器人周围不同地方,可快速定位火焰。要占用较多的数据输入通道,要对扩展卡,甚至是机器人主板进行改造。 要确定火焰位置即火焰定位,首先确定火焰方向,这样发现火焰后可直接朝火焰方向前进,节省灭火时间。 确定火焰方向一般可采用以下方法。 a,差动定位:根据左右两个远红外探头检测值,调整机器人方向,要求比赛前预先调整探头直到检测效果较一致。 b,最小值定位:机器人发现火焰后旋转一周,定下最小值(最亮点),然后通过朝向最小值方向前进,要求采用其它辅助装置记住最小值位置(指南针等),当然也可以实时判断是否到达最小值,这样可减少火焰方向定位时间。 (3)灭火方式 机器人灭火比赛对灭火方方式没有一定限制,但不能使用任何危险的或可能破坏比赛场地的方法或物质来灭火(如通过燃放爆竹产生冲击来使蜡烛熄灭),也不能通过碰倒蜡烛的方式来灭火。它可以运用类似水、空气、二氧化碳等,由于采用风扇的方式简单可靠易行,因此大多数用户都采用灭火这种方案。 三 设计注意事项 赛前调试至关重要。有的新手可能认为,在家将机器人调试好了,比赛时直接参赛就行了。这种认识是完全错误的,可以说成功的机率几乎为零。机器人的表现受场地、灯光、电池电压、电机等诸多因素的影响,你不可能做到你的训练场地环境和比赛场地环境一模一样。 不要过高期望机器人走直线。因为机器人左右马达的转速差异,在左右马达同功率的情况下,可能会走偏。可以通过设置机器人左右马达功率来调整机器人走直线。 要设置好红外检测,尽量减少碰撞。机器人与墙壁或家具发生碰撞,一是要扣分,二是发生碰撞后机器人很容易错过房间或弄错方向。 灭火风扇要大一些,灭火时间要设置长一些。比赛中我们发现,有的机器人在发出灭火动作后3秒钟就可将蜡烛熄灭,也有的机器人花了近30秒钟才将蜡烛熄灭,这是风扇大小的原因造成的。如果你的风扇比较小,你可以考虑将灭火的时间设置长一些。 四 问题及对应解决方法1、机器人在走直线过程中碰到两侧的墙壁 这说明机器人在走动过程中,左侧红外探测器不够灵敏或过于灵敏,所以我们要调整左侧红外发射器的发射强度。如果机器人碰到左侧墙壁,我们就必须加大左侧红外发射器的发射强度,使红外探测器更加灵敏。如果机器人碰到右侧墙壁,我们就必须减小左侧红外发射器的发射强度。红外发射器的调整方法如下:用十字螺丝 刀顺时针方向转动红外发射器上的旋钮,就能加大红外发射器的发射强度;用十字螺丝刀逆时针方向转动红外发射器上的旋钮,就能减小红外发射器的发射强度。3、机器人在向左拐弯时卡在左墙壁上 这说明机器人在左拐弯时转动的弧度不够大。所以我们需要在程序中调整左右马达的速度,使其左拐弯的弧度变大。调整的方法有许多种,例如:提高左马达的速度或降低右马达的速度;也可以加快前冲的速度。4、风扇打在了蜡烛上
由于惯性前冲的厉害,可以设置,发现蜡烛旁边的白线后退一段,这样风力也大,容易扇灭火焰。现在新出的AS-MF四轮驱动,带有刹车模块,可能不会出现撞蜡烛现象,但是要把刹车距离设置合适,否则回退出白线灭火,这样就犯规了。五 实例与演示
二. 控制策略
三. 设计注意事项
四. 可能碰到的问题及相应解答
五. 演示与问答近年来,我国石化等基础工业有了飞速的发展,在生产过程中的易燃易爆和剧毒化学制品急剧增长,由于设备和管理方面的原因,导致化学危险品和放射性物质泄漏、燃烧爆炸的事故增多。灭火机器人作为特种消防设备可代替消防队员接近火场实施有效的灭火救援、化学检验和火场侦察。它的应用将提高消防部队扑灭特大恶性火灾的实战能力,对减少国家财产损失和灭火救援人员的伤亡将产生重要的作用。国内消防部队要求研制、配备灭火机器人的呼声越来越高。因此研制灭火机器人,对我国21世纪的消防装备的发展以及消防部队的技战术的拓展将产生重要的影响。 一 硬件设计 灭火机器人的主要硬件部分是温度传感器、电风扇、机器人小车、单片机,硬件设计需要把他们进行合理的连接起来,实现灭火机器人的硬件部分。(1)红外传感(2)温度传感科目一考试 http://km1.jsyst.cn 驾驶员理论考试
科目二考试 http://km2.jsyst.cn 场地考试
科目三考试 http://km3.jsyst.cn 实际道路考试
科目四考试 http://km4.jsyst.cn 安全文明驾驶常识考试
2016年驾驶员试题网学车试题大全(3)PROTUES仿真(4)小车部分电机驱动模块我们知道伺服电机转动的快慢,可用改变输入脉冲信号的频率来控制,因此运用这一原理,就可控制左右电机的速度,来实现小车做出不同的动作。程序中调用不同的延时函数实现对电机输入不同的脉冲信号。 我们知道伺服电机转动的快慢,可用改变输入脉冲信号的频率来控制,因此运用这一原理,就可控制左右电机的速度,来实现小车做出不同的动作。程序中调用不同的延时函数实现对电机输入不同的脉冲信号。 二 灭火机器人算法策略 (1)灭火路径的优化 机器人灭火比赛场地一般采用国际灭火比赛标准场地,场地大小、房间位置、蜡烛家具摆放位置都按一定规则。为了尽快找到火源,可采用各种扩展卡增强机器人导航能力,扩展卡可以购买也可自制。以下是常用的一些导航方案。 a,红外避障引导:机器人自带红外探测器,注意灵敏度的调整。 b,采用机器人编码器进行引导:编码器精度不高,注意左右轮补偿。 c,红外测量距离的引导:利用红外测距,简单可靠,但测距范围有限(10cm~80cm) 实现的方法:首先是寻找火源。如果事先知道火源在哪个房间,可以通过走直线和转弯的方法直接进入房间灭火。如果事先并不知道火源在哪个房间,就要用走迷宫的方法,逐个房间进行寻找。走迷宫可以遵循左手法则或右手法则,一边走迷宫,一边检测火焰。接近蜡烛时,火焰传感器的返回值跟环境值有明显的区别,机器人从而来判断是否找到蜡烛。 顺墙坐标算法
左手定则算法
光敏导航算法 无论是树型迷宫还是网孔型迷宫,要找到一条路径并不难。如果采用“顺墙摸”的办法,肯定可以走出迷宫,但不一定是最短路径。 所谓左手法则就是机器人把左边的墙壁看成是参照物,机器人贴迷宫左侧的墙壁实现行走。
左手定则的基本法则就是:看到墙壁离开墙壁,看不到墙壁,接近墙壁。
灭火实际控制图迷宫演示(2) 火焰定位 火焰定位包括寻找火焰和火焰定位两个部分。 机器人寻找火焰一般采用远红外火焰探头作为探测工具,为了准确、快速地确定火焰位置,可采用多种方式对远红外火焰探头进行改进,以下是常用的一些改装方案。 a,火焰探头的串联和并联:提高探头灵敏度。需要一定的硬件知识。 b,火焰探头的分散和集中:多个火焰探头分布在机器人周围不同地方,可快速定位火焰。要占用较多的数据输入通道,要对扩展卡,甚至是机器人主板进行改造。 要确定火焰位置即火焰定位,首先确定火焰方向,这样发现火焰后可直接朝火焰方向前进,节省灭火时间。 确定火焰方向一般可采用以下方法。 a,差动定位:根据左右两个远红外探头检测值,调整机器人方向,要求比赛前预先调整探头直到检测效果较一致。 b,最小值定位:机器人发现火焰后旋转一周,定下最小值(最亮点),然后通过朝向最小值方向前进,要求采用其它辅助装置记住最小值位置(指南针等),当然也可以实时判断是否到达最小值,这样可减少火焰方向定位时间。 (3)灭火方式 机器人灭火比赛对灭火方方式没有一定限制,但不能使用任何危险的或可能破坏比赛场地的方法或物质来灭火(如通过燃放爆竹产生冲击来使蜡烛熄灭),也不能通过碰倒蜡烛的方式来灭火。它可以运用类似水、空气、二氧化碳等,由于采用风扇的方式简单可靠易行,因此大多数用户都采用灭火这种方案。 三 设计注意事项 赛前调试至关重要。有的新手可能认为,在家将机器人调试好了,比赛时直接参赛就行了。这种认识是完全错误的,可以说成功的机率几乎为零。机器人的表现受场地、灯光、电池电压、电机等诸多因素的影响,你不可能做到你的训练场地环境和比赛场地环境一模一样。 不要过高期望机器人走直线。因为机器人左右马达的转速差异,在左右马达同功率的情况下,可能会走偏。可以通过设置机器人左右马达功率来调整机器人走直线。 要设置好红外检测,尽量减少碰撞。机器人与墙壁或家具发生碰撞,一是要扣分,二是发生碰撞后机器人很容易错过房间或弄错方向。 灭火风扇要大一些,灭火时间要设置长一些。比赛中我们发现,有的机器人在发出灭火动作后3秒钟就可将蜡烛熄灭,也有的机器人花了近30秒钟才将蜡烛熄灭,这是风扇大小的原因造成的。如果你的风扇比较小,你可以考虑将灭火的时间设置长一些。 四 问题及对应解决方法1、机器人在走直线过程中碰到两侧的墙壁 这说明机器人在走动过程中,左侧红外探测器不够灵敏或过于灵敏,所以我们要调整左侧红外发射器的发射强度。如果机器人碰到左侧墙壁,我们就必须加大左侧红外发射器的发射强度,使红外探测器更加灵敏。如果机器人碰到右侧墙壁,我们就必须减小左侧红外发射器的发射强度。红外发射器的调整方法如下:用十字螺丝 刀顺时针方向转动红外发射器上的旋钮,就能加大红外发射器的发射强度;用十字螺丝刀逆时针方向转动红外发射器上的旋钮,就能减小红外发射器的发射强度。3、机器人在向左拐弯时卡在左墙壁上 这说明机器人在左拐弯时转动的弧度不够大。所以我们需要在程序中调整左右马达的速度,使其左拐弯的弧度变大。调整的方法有许多种,例如:提高左马达的速度或降低右马达的速度;也可以加快前冲的速度。4、风扇打在了蜡烛上
由于惯性前冲的厉害,可以设置,发现蜡烛旁边的白线后退一段,这样风力也大,容易扇灭火焰。现在新出的AS-MF四轮驱动,带有刹车模块,可能不会出现撞蜡烛现象,但是要把刹车距离设置合适,否则回退出白线灭火,这样就犯规了。五 实例与演示