第9课 循线而行——地面传感器和机器人的循线行走 课件
文档属性
| 名称 | 第9课 循线而行——地面传感器和机器人的循线行走 课件 |
|
|
| 格式 | zip | ||
| 文件大小 | 611.4KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 清华大学版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2017-05-23 00:00:00 | ||
图片预览

文档简介
课件20张PPT。清华大学出版社,九年级下册 第二单元
第九课 循线而行
——地面传感器和机器人循线行走一、教材分析本教材在编写方式上以学生动手,动脑参与活动为主线,体现了在教师的引导下的学生自主学习,以科学的体例结构为基础将信息技术知识融会贯通,通过各栏目的设置使学习层层深入,从而达到既定的教学目标。本节课主要讲利用地面传感器来检测不同颜色的检测值,并通过地面检测模块对检测到的地面检测值进行判断的功能,从而根据判断的结果决定程序的走向。
二、学情分析针对于前面几节课所学习的内容,分别让学生了解了红外传感器像机器人的眼睛,通过红外传感器可以获得的4种障碍信息的检测值,碰撞传感器像机器人的皮肤,可根据程序对碰撞信息进行处理。学生在前面所学的基础上,学习本节课,相对来说要容易些,通过任务一地面传感器的检测,任务二,机器人在绿色的草地上奔跑,任务三机器人循线回家,层层递进的教学方式,拟在体现教学目标,提高学生的操作和对程序的分析能力。
三、教学目标知识与技能:
了解地面灰度传感器的工作原理。
2.过程与方法:
学会地面检测程序的编写,能用检测程序检测地面的灰度。
能利用“地面检测”模块实施相关的机器人项目
3.情感态度与价值观:
通过地面检测模块的程序设置,激发学生对编写程序的兴趣,提高学生分析程序的能力。
四、教学重难点教学重点:
1.地面检测模块的应用
2.能利用“地面检测”模块实施相关的机器人项目
教学难点:
1.了解地面传感器的工作原理
2.对地面检测模块能够进行合理的实施。
?
?
五、教学方法:
任务驱动,讲授,演示
?
六、教学课时
1课时
七、教学环境以及资源准备:
教学环境:教学机房,电子教室软件
资源:vjc1.5仿真机器人,多 媒体课件
?
八、教学过程回顾上一节课的知识点,教师提问:碰撞传感器的功能?像机器人的皮肤,可根据程序对碰撞信息进行处理。
检测值的特点:即来自相邻两个碰撞开关之间的碰撞,其碰撞值为这两个碰撞开关遇到碰撞时检测值的和。
讲授新课引入:
过马路要走人行横道,这个是我们每个公民应该遵守的交通规则,那么机器人也能识别斑马线吗?我们今天就一起来学习机器人沿白线行走的机器人循线项目。
知识点:地面传感器
地面传感器由一个发光的二极管和亮度传感器组成。提问1.亮度检测值范围?
2.它与亮度之间的关系?学生回顾思考0-255之间的整数。
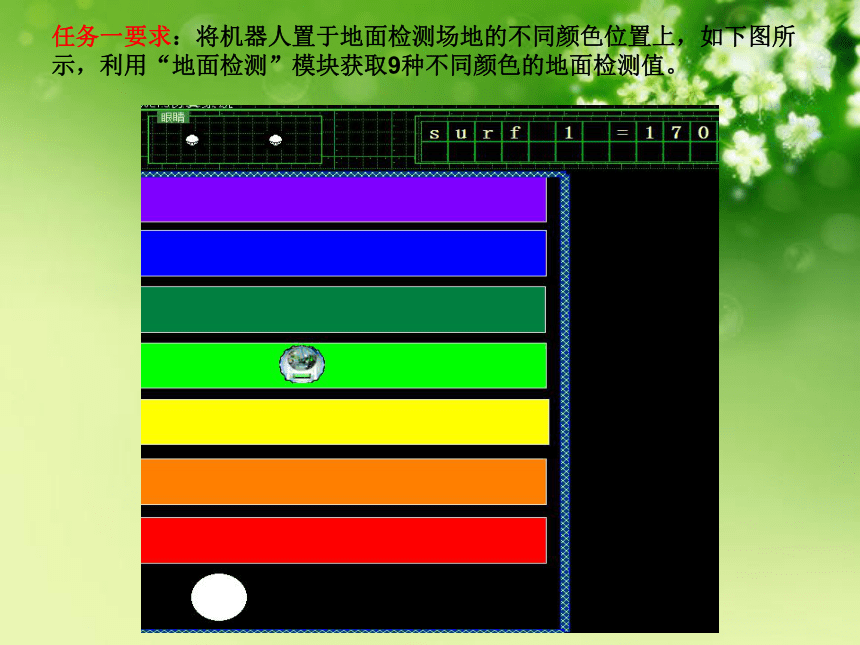
光线越强检测值越小,光线越弱,检测值越大。任务一要求:将机器人置于地面检测场地的不同颜色位置上,如下图所
示,利用“地面检测”模块获取9种不同颜色的地面检测值。
提问:任务一当中为什么只在显示模块中显示一个地面变量?地面检测程序得出地面检测值表根据地面检测值表得出结论地面传感器能够检测地面灰度,检测值0~255之间的整数。
地面颜色越深,检测值越大;地面颜色越浅,检测值越小。
“地面检测”模块可以获得地面传感器检测到的地面检测值。
“地面检测”模块具有对检测到的地面检测值进行判断的功能,并可根据判断的结果决定程序的走向。
通过“地面检测”模块可以让机器人循着地面的颜色标记行走地面检测模块的功能任务二要求:将机器人置于绿色草坪上,如下图所示,让其在草坪内 自由奔跑,利用“地面检测”模块完成这一任务。 分析任务在草地上机器人奔跑的程序机器人右转60度的参数设置?为了让同学们更好的区分颜色,可以在地面检测模块下放一个显示模块,在仿真环境中的右上角LCD屏上可显示你所选择的颜色值,可通过显示模块查看自己选的颜色是否正确。任务三要求:将机器人置于“循线回家”场地中,如下图所示,让其沿
白色路线回到绿色家园后停止,利用“地面检测”模块完成
这一任务。
任务三分析机器人循线回家程序V=80,s=0.1 参数代表的是多少度?学生上机提交程序,教师点评,应注意以下容易出错的几点 1.做程序的时候,看清楚所选的模块是条件循环还是条件判断? 2.模块中参数的设置,速度和时间秒要恰当,尤其是任务三当中,学生容易让机器人在原地打转。 3.条件判断模块中对地面灰度的设置值。教师小结:
“地面检测”模块可以获得地面传感器检测到的地面检测值。
“地面检测”模块具有对检测到的地面检测值进行判断的功能,并可根据判断的结果决定程序的走向。
通过“地面检测”模块可以让机器人循着地面的颜色标记行走
地面传感器是由一个发光的二极管和亮度传感器组成。
谢谢大家
——地面传感器和机器人循线行走一、教材分析本教材在编写方式上以学生动手,动脑参与活动为主线,体现了在教师的引导下的学生自主学习,以科学的体例结构为基础将信息技术知识融会贯通,通过各栏目的设置使学习层层深入,从而达到既定的教学目标。本节课主要讲利用地面传感器来检测不同颜色的检测值,并通过地面检测模块对检测到的地面检测值进行判断的功能,从而根据判断的结果决定程序的走向。
二、学情分析针对于前面几节课所学习的内容,分别让学生了解了红外传感器像机器人的眼睛,通过红外传感器可以获得的4种障碍信息的检测值,碰撞传感器像机器人的皮肤,可根据程序对碰撞信息进行处理。学生在前面所学的基础上,学习本节课,相对来说要容易些,通过任务一地面传感器的检测,任务二,机器人在绿色的草地上奔跑,任务三机器人循线回家,层层递进的教学方式,拟在体现教学目标,提高学生的操作和对程序的分析能力。
三、教学目标知识与技能:
了解地面灰度传感器的工作原理。
2.过程与方法:
学会地面检测程序的编写,能用检测程序检测地面的灰度。
能利用“地面检测”模块实施相关的机器人项目
3.情感态度与价值观:
通过地面检测模块的程序设置,激发学生对编写程序的兴趣,提高学生分析程序的能力。
四、教学重难点教学重点:
1.地面检测模块的应用
2.能利用“地面检测”模块实施相关的机器人项目
教学难点:
1.了解地面传感器的工作原理
2.对地面检测模块能够进行合理的实施。
?
?
五、教学方法:
任务驱动,讲授,演示
?
六、教学课时
1课时
七、教学环境以及资源准备:
教学环境:教学机房,电子教室软件
资源:vjc1.5仿真机器人,多 媒体课件
?
八、教学过程回顾上一节课的知识点,教师提问:碰撞传感器的功能?像机器人的皮肤,可根据程序对碰撞信息进行处理。
检测值的特点:即来自相邻两个碰撞开关之间的碰撞,其碰撞值为这两个碰撞开关遇到碰撞时检测值的和。
讲授新课引入:
过马路要走人行横道,这个是我们每个公民应该遵守的交通规则,那么机器人也能识别斑马线吗?我们今天就一起来学习机器人沿白线行走的机器人循线项目。
知识点:地面传感器
地面传感器由一个发光的二极管和亮度传感器组成。提问1.亮度检测值范围?
2.它与亮度之间的关系?学生回顾思考0-255之间的整数。
光线越强检测值越小,光线越弱,检测值越大。任务一要求:将机器人置于地面检测场地的不同颜色位置上,如下图所
示,利用“地面检测”模块获取9种不同颜色的地面检测值。
提问:任务一当中为什么只在显示模块中显示一个地面变量?地面检测程序得出地面检测值表根据地面检测值表得出结论地面传感器能够检测地面灰度,检测值0~255之间的整数。
地面颜色越深,检测值越大;地面颜色越浅,检测值越小。
“地面检测”模块可以获得地面传感器检测到的地面检测值。
“地面检测”模块具有对检测到的地面检测值进行判断的功能,并可根据判断的结果决定程序的走向。
通过“地面检测”模块可以让机器人循着地面的颜色标记行走地面检测模块的功能任务二要求:将机器人置于绿色草坪上,如下图所示,让其在草坪内 自由奔跑,利用“地面检测”模块完成这一任务。 分析任务在草地上机器人奔跑的程序机器人右转60度的参数设置?为了让同学们更好的区分颜色,可以在地面检测模块下放一个显示模块,在仿真环境中的右上角LCD屏上可显示你所选择的颜色值,可通过显示模块查看自己选的颜色是否正确。任务三要求:将机器人置于“循线回家”场地中,如下图所示,让其沿
白色路线回到绿色家园后停止,利用“地面检测”模块完成
这一任务。
任务三分析机器人循线回家程序V=80,s=0.1 参数代表的是多少度?学生上机提交程序,教师点评,应注意以下容易出错的几点 1.做程序的时候,看清楚所选的模块是条件循环还是条件判断? 2.模块中参数的设置,速度和时间秒要恰当,尤其是任务三当中,学生容易让机器人在原地打转。 3.条件判断模块中对地面灰度的设置值。教师小结:
“地面检测”模块可以获得地面传感器检测到的地面检测值。
“地面检测”模块具有对检测到的地面检测值进行判断的功能,并可根据判断的结果决定程序的走向。
通过“地面检测”模块可以让机器人循着地面的颜色标记行走
地面传感器是由一个发光的二极管和亮度传感器组成。
谢谢大家
同课章节目录
- 第1单元 未来伙伴
- 第1课 能力风暴——机器人仿真系统的应用
- 第2课 方圆之间——“转向”模块与正多边形设计
- 第3课 神奇美图——循环嵌套与规则图形设计
- 第4课 争创第一——“启动电机”模块和“延时等待”模块
- 第5课 歌声嘹亮——子程序设计和机器人发音
- 第2单元 非凡智慧
- 第6课 奔向光明——亮度传感器的应用和条件控制
- 第7课 昂首阔步——红外传感器和机器人的避障行走
- 第8课 碰撞运动——碰撞传感器和机器人的避碰行走
- 第9课 循线而行——地面传感器和机器人的循线行走
- 第3单元 身经百战
- 第10课 绕月飞行——传感器检测模块的条件判断和子程序的应用
- 第11课 赶赴火场——“系统时间”检测模块的应用
- 第12课 智闯迷宫——机器人走迷宫的行走规则
- 第4单元 友好相处
- 第13课 忠诚卫士——红外传感器和计数器的应用
- 第14课 金鸡报晓——光敏传感器和多任务的应用
- 第15课 随光奏乐——光敏传感器和自定义模块的应用
- 第16课 音乐之声——碰撞传感器的应用
- 第5单元* STEM专题拓展