第2课 方圆之间——“转向”模块与正多边形设计 课件
文档属性
| 名称 | 第2课 方圆之间——“转向”模块与正多边形设计 课件 |

|
|
| 格式 | zip | ||
| 文件大小 | 784.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 清华大学版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2017-05-24 19:20:11 | ||
图片预览

文档简介
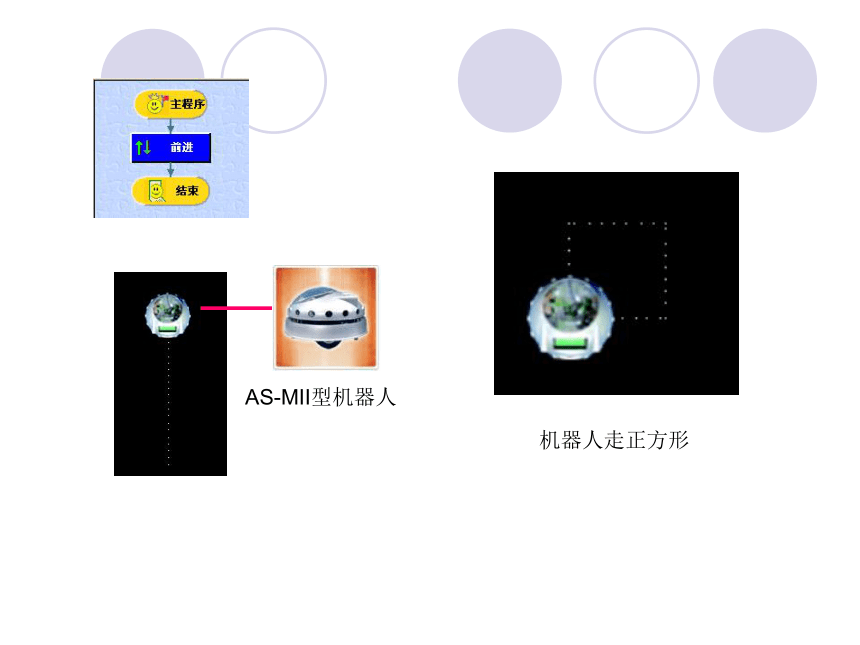
课件11张PPT。方圆之间——“转向”模块与正多边形设计AS-MII型机器人机器人走正方形任务导航利用不同模块的不同功能,让机器人走出一些简单的基本图形。机器人走正方形的一条边单 边 行 走直 行 再 向 右 转<90°智 多 星由于受机器人运动速度的影响,所以需要经过反复的调试才能确定机器人转90°所用的时间。
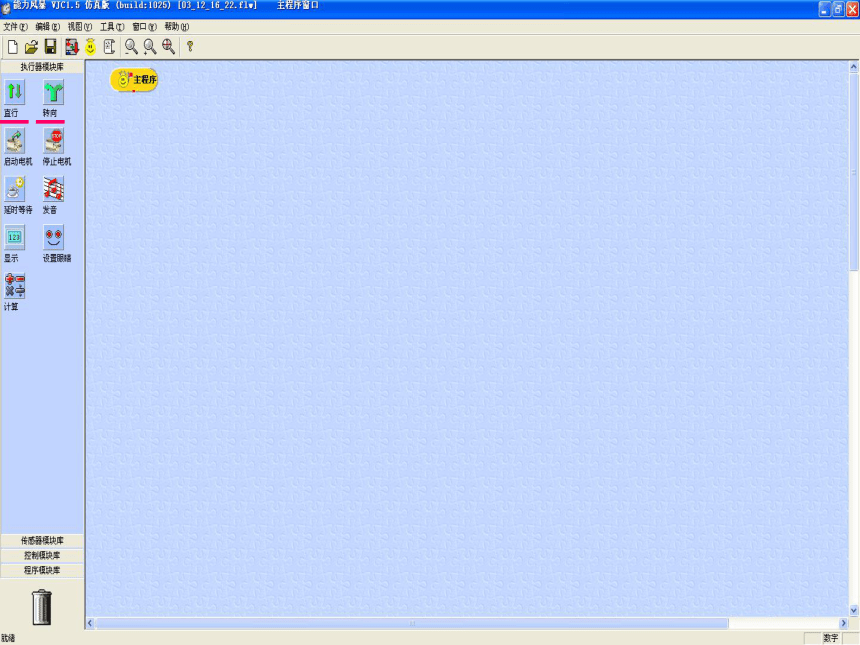
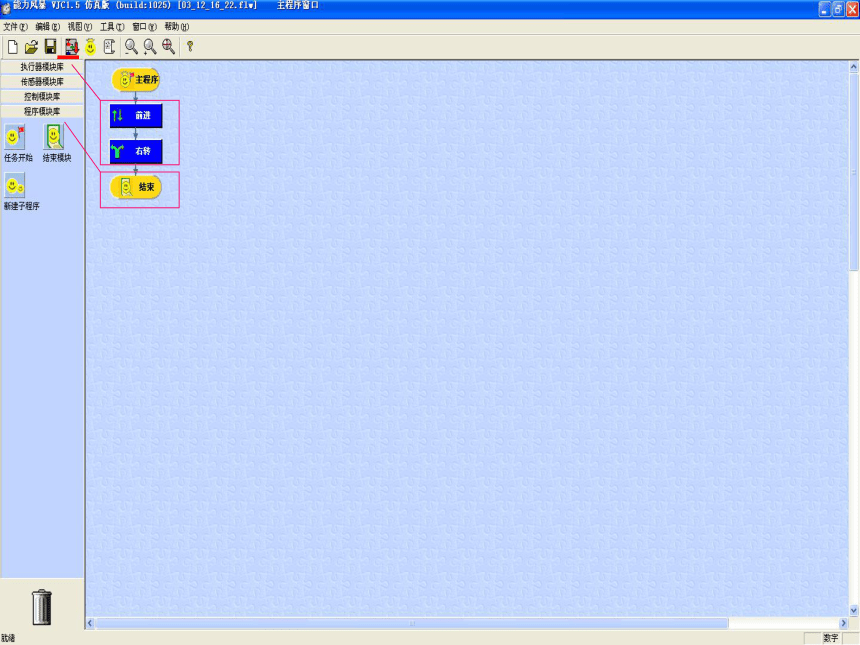
单边行走程序流程图对应的VJC代码
机器人走正方形正方形,4条边相等,4个角都是直角
可以通过执行4次“单边行走”程序来实现
循环四次单边行走开始循环变量的初值为0循环变量的值小于4吗?是前进功率80.行走时间0.5右转功率80,行走时间0.298循环变量的值累加1结束否谢谢
单边行走程序流程图对应的VJC代码
机器人走正方形正方形,4条边相等,4个角都是直角
可以通过执行4次“单边行走”程序来实现
循环四次单边行走开始循环变量的初值为0循环变量的值小于4吗?是前进功率80.行走时间0.5右转功率80,行走时间0.298循环变量的值累加1结束否谢谢
同课章节目录
- 第1单元 未来伙伴
- 第1课 能力风暴——机器人仿真系统的应用
- 第2课 方圆之间——“转向”模块与正多边形设计
- 第3课 神奇美图——循环嵌套与规则图形设计
- 第4课 争创第一——“启动电机”模块和“延时等待”模块
- 第5课 歌声嘹亮——子程序设计和机器人发音
- 第2单元 非凡智慧
- 第6课 奔向光明——亮度传感器的应用和条件控制
- 第7课 昂首阔步——红外传感器和机器人的避障行走
- 第8课 碰撞运动——碰撞传感器和机器人的避碰行走
- 第9课 循线而行——地面传感器和机器人的循线行走
- 第3单元 身经百战
- 第10课 绕月飞行——传感器检测模块的条件判断和子程序的应用
- 第11课 赶赴火场——“系统时间”检测模块的应用
- 第12课 智闯迷宫——机器人走迷宫的行走规则
- 第4单元 友好相处
- 第13课 忠诚卫士——红外传感器和计数器的应用
- 第14课 金鸡报晓——光敏传感器和多任务的应用
- 第15课 随光奏乐——光敏传感器和自定义模块的应用
- 第16课 音乐之声——碰撞传感器的应用
- 第5单元* STEM专题拓展