第3课 忠实的巡逻兵 课件
文档属性
| 名称 | 第3课 忠实的巡逻兵 课件 |  | |
| 格式 | zip | ||
| 文件大小 | 472.6KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息科技(信息技术) | ||
| 更新时间 | 2017-08-17 16:31:43 | ||
图片预览


文档简介
课件9张PPT。4、操作:在RC平台打开“xunlob”程 序,并会运行仿真,并能发现该程序的不足。1、RC编程软件是人与机器人沟通的( )。打开诺宝RC软件平台,软件主界面分为标题栏、菜单栏、工具栏、( )、( )五个部分。2、观察RC软件平台的模块库区,( )属于机器人的感知部分,而
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列任务 。忠实的巡逻兵称为( )称为( )称为( )称为( )3、点击RC平台模块库区的项目,出现一些图形,你知道它们的名称和用途吗?4、操作:在RC平台打开“xunlob”程 序,并会运行仿真,并能发现该程序的不足。1、RC编程软件是人与机器人沟通的( )。打开诺宝RC软件平台,软件主界面分为标题栏、菜单栏、工具栏、( )、( )五个部分。2、观察RC软件平台的模块库区,( )属于机器人的感知部分,而
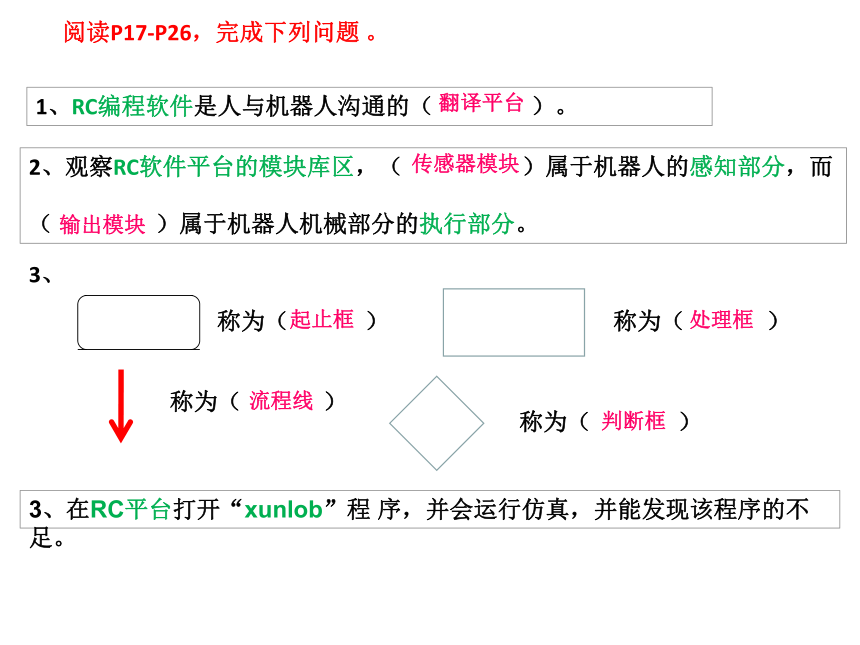
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列任务 。称为( )称为( )称为( )称为( )3、3、在RC平台打开“xunlob”程 序,并会运行仿真,并能发现该程序的不足。1、RC编程软件是人与机器人沟通的( )。2、观察RC软件平台的模块库区,( )属于机器人的感知部分,而
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列问题 。翻译平台传感器模块输出模块起止框处理框 流程线判断框完善“xunlob ”程 序,让它成为可巡逻四边形区域的机器人。并另存为“xunlob4”。你觉得有什么问题需要提醒同学们的?练一练完善“xunlob ”程 序,让它成为可巡逻四边形区域的机器人。并另存为“xunlob4”。你觉得有什么问题需要提醒同学们的?练一练设计一个可巡逻三边形区域的机器人。挑战自己设计一个可巡逻六边形区域的机器人。设计一个可巡逻三边形区域的机器人。挑战自己设计一个可巡逻六边形区域的机器人挑战自己
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列任务 。忠实的巡逻兵称为( )称为( )称为( )称为( )3、点击RC平台模块库区的项目,出现一些图形,你知道它们的名称和用途吗?4、操作:在RC平台打开“xunlob”程 序,并会运行仿真,并能发现该程序的不足。1、RC编程软件是人与机器人沟通的( )。打开诺宝RC软件平台,软件主界面分为标题栏、菜单栏、工具栏、( )、( )五个部分。2、观察RC软件平台的模块库区,( )属于机器人的感知部分,而
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列任务 。称为( )称为( )称为( )称为( )3、3、在RC平台打开“xunlob”程 序,并会运行仿真,并能发现该程序的不足。1、RC编程软件是人与机器人沟通的( )。2、观察RC软件平台的模块库区,( )属于机器人的感知部分,而
( )属于机器人机械部分的执行部分。阅读P17-P26,完成下列问题 。翻译平台传感器模块输出模块起止框处理框 流程线判断框完善“xunlob ”程 序,让它成为可巡逻四边形区域的机器人。并另存为“xunlob4”。你觉得有什么问题需要提醒同学们的?练一练完善“xunlob ”程 序,让它成为可巡逻四边形区域的机器人。并另存为“xunlob4”。你觉得有什么问题需要提醒同学们的?练一练设计一个可巡逻三边形区域的机器人。挑战自己设计一个可巡逻六边形区域的机器人。设计一个可巡逻三边形区域的机器人。挑战自己设计一个可巡逻六边形区域的机器人挑战自己