第9课 沿轨迹行走的机器人 课件
文档属性
| 名称 | 第9课 沿轨迹行走的机器人 课件 |
|
|
| 格式 | zip | ||
| 文件大小 | 399.7KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 粤教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2017-08-17 00:00:00 | ||
图片预览
文档简介
课件7张PPT。设计沿轨迹行走的机器人第9课阅读P73-P79,快来接受挑战吧?1、第9课教我们设计一个怎样的机器人?用语言描述它的功能。现实生活中有什么用?
2、这种机器人需要用什么传感器?这种传感器的组成部分?使用什么传感器变量?变量的取值代表的意义是什么?
3、编写第9课的机器人程序,思考:
(1)仿真时,分别设计圆环轨迹、圆弧轨迹、直线轨迹,观察机器人在这三种轨迹上行走的位置,你发现什么?
(2)提出你不明白的问题。
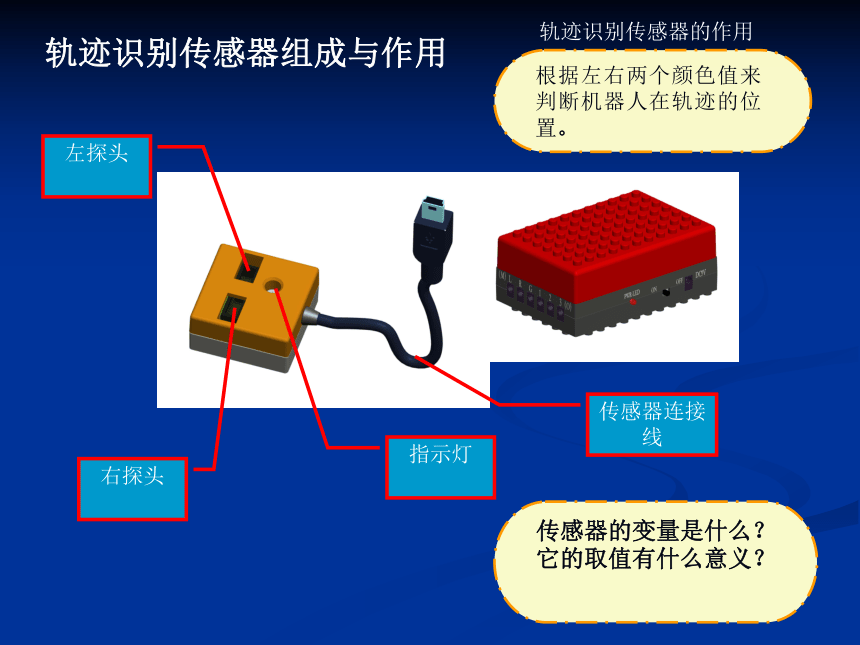
第9课课前习右探头轨迹识别传感器组成与作用传感器连接线左探头指示灯轨迹识别传感器的作用轨迹变量有多少种取值?轨迹变量= ?
机器人往 ? 转轨迹变量= ?
机器人往 ? 转轨迹变量=?
机器人往 ? 转轨迹变量= ?
机器人往 ? 转轨迹变量=?
机器人往 ? 转你能根据轨迹变量的取值和机器人的动作重新修改你的程序吗?轨迹变量有多少种取值?轨迹变量=
机器人往 转轨迹变量=
机器人往 转轨迹变量=
机器人 轨迹变量=
机器人往 转轨迹变量=
机器人往 转0右右23直走1左0右你能根据轨迹变量的取值和机器人的动作重新修改你的程序吗?
让机器人能走长方形轨迹。
机器人沿轨迹边缘行走只在左探头探测到轨迹时行走。3、编写第9课的机器人程序,思考:
(1)仿真时,分别设计圆环轨迹、圆弧轨迹、直线轨迹,观察机器人在这三种轨迹上行走的位置,你发现什么?
(2)提出你不明白的问题。挑战自己设置不同的仿真环境测试你的程序。
2、这种机器人需要用什么传感器?这种传感器的组成部分?使用什么传感器变量?变量的取值代表的意义是什么?
3、编写第9课的机器人程序,思考:
(1)仿真时,分别设计圆环轨迹、圆弧轨迹、直线轨迹,观察机器人在这三种轨迹上行走的位置,你发现什么?
(2)提出你不明白的问题。
第9课课前习右探头轨迹识别传感器组成与作用传感器连接线左探头指示灯轨迹识别传感器的作用轨迹变量有多少种取值?轨迹变量= ?
机器人往 ? 转轨迹变量= ?
机器人往 ? 转轨迹变量=?
机器人往 ? 转轨迹变量= ?
机器人往 ? 转轨迹变量=?
机器人往 ? 转你能根据轨迹变量的取值和机器人的动作重新修改你的程序吗?轨迹变量有多少种取值?轨迹变量=
机器人往 转轨迹变量=
机器人往 转轨迹变量=
机器人 轨迹变量=
机器人往 转轨迹变量=
机器人往 转0右右23直走1左0右你能根据轨迹变量的取值和机器人的动作重新修改你的程序吗?
让机器人能走长方形轨迹。
机器人沿轨迹边缘行走只在左探头探测到轨迹时行走。3、编写第9课的机器人程序,思考:
(1)仿真时,分别设计圆环轨迹、圆弧轨迹、直线轨迹,观察机器人在这三种轨迹上行走的位置,你发现什么?
(2)提出你不明白的问题。挑战自己设置不同的仿真环境测试你的程序。