认识简单机械
图片预览
文档简介
第3章 能量的转化与守恒
第3节 认识简单机械
一、【教材分析】
本节主要学习杠杆、滑轮、滑轮组和斜面等简单机械的特点及工作原理,并通过实例分析引入有用功、额外功和机械效率的概念,让学生了解生活生产中常用简单机械的工作原理,了解使用机械时的能量转化过程及转化效率。教科书把杠杆、滑轮、滑轮组和斜面集中在一起,其优势是易于进行一些基本特点的比较,找出相近的规律,易于对简单机械的整体认识。
在杠杆教学中,要使学生认识什么是杠杆,要从实例及学生的生活体会中,抓住杠杆本质的特征,培养学生的分析能力。杠杆的平衡条件是本节的重点,也是以后学习滑轮的基础,应让学生在实验中探索、分析得到结论,以提高学生的能力。同样,力臂的概念是本节的难点,也是学习杠杆平衡条件及应用的基础,要通过实验,突破这一难点,为以下的学习打下基础。在杠杆的应用部分,应让学生从杠杆的平衡条件结论出发,分析不同杠杆的特征,并结合一些具体实例的分析,把知识学活。
滑轮,许多学生都见过或使用过,但并不一定会仔细研究过它,因此,教材中要求首先让学生仔细观察滑轮,并用实物对照挂图说明滑轮的结构。让学生通过日常生活中滑轮应用实例的分析,并就这些实例提出问题,让学生思考不同的例子中,滑轮可以起什么作用。通过演示实验,使学生知道各种滑轮的特点,并通过对不同滑轮工作时结构的分析,使学生了解滑轮的实质。
二、【课标要求】
1. 认识简单机械的作用
2. 用简单机械原理解释人体的运动,能区分功率和机械效率,从能的传递和转化认识功率和机械效率
活动建议:调查生活中常见的简单机械,探究杠杆的平衡条件
三、【教学目标】
(一)、知识与技能
1. 知道杠杆是一种简单机械,能找出杠杆的支点、动力和阻力、动力臂和阻力臂。
2. 理解杠杆的平衡条件,知道杠杆省力或费力的原因。
3. 了解定滑轮、动滑轮的工作原理,知道定滑轮、动滑轮的实质是一个杠杆,了解滑轮组及其工作原理。
4. 理解机械效率,知道有用功、额外功和总功的区别。
(二)、方法与过程
1.能分析杠杆使用过程中的能量转化过程。
2.学会探究杠杆平衡条件。
3.学习测量简单机械的机械效率。
(三)、情感态度与价值观
了解机械使用的历史及发展过程,认识机械的使用对社会发展的作用。
四、【教学重点】
杠杆及杠杆平衡条件;简单机械的基本特征;渗透使用简单机械时的能量转化。
五、【教学难点】
动力臂和阻力臂;定滑轮、动滑轮的实质是一个杠杆;分析使用机械时的能量转化及机械效率的概念。
六、【课时安排】5课时
内 容 课 时
1. 认识杠杆 1
2. 研究杠杆的平衡条件(包括分组实验) 1
3. 杠杆的应用 1
4. 定滑轮和动滑轮、滑轮组 1
5. 机械效率、测量斜面的机械效率 1
七、【教学过程设计】
[第1课时] 杠杆
〖新课引入〗
利用课件观看图片
(1)古代埃及人用杠杆搬动巨石修金字塔。
(2)游乐园里小朋友玩跷跷板。
(3)农村里从井里提水的压水机的杠杆。
(4)钓鱼。
(4)缝纫机的脚踏板。
现代生产、生活中,人们经常使用简单机械,如钳子、板手、螺丝刀、瓶起子(出示实物)等。有些机械是复杂的,如车床、收割机等复杂机械由许多简单元件组成,其中象杠杆、滑轮等,初中我们主要研究杠杆、滑轮。利用多媒体展示一些机械(如:古代劳动工具——蒸汽机——现代机械),让学生说说使用它们的好处——减轻人的劳动强度,提高工作效率。了解机械的发展历史及机械对经济发展的作用。
引言:任何复杂的机械都是由一些简单的机械组合而成的,学习机械应当从最简单的机械——杠杆开始。阿基米德曾说过这样一句话:“给我一个支点和一根足够长的棍,我就能搬动地球。” 阿基米德虽然没能搬动地球,但是他的话却生动地告诉人们,杠杆能产生巨大的力。那什么是杠杆呢?使用杠杆为什么能产生巨大的力呢?
〖探究学习〗
1. 寻找共性,建立概念
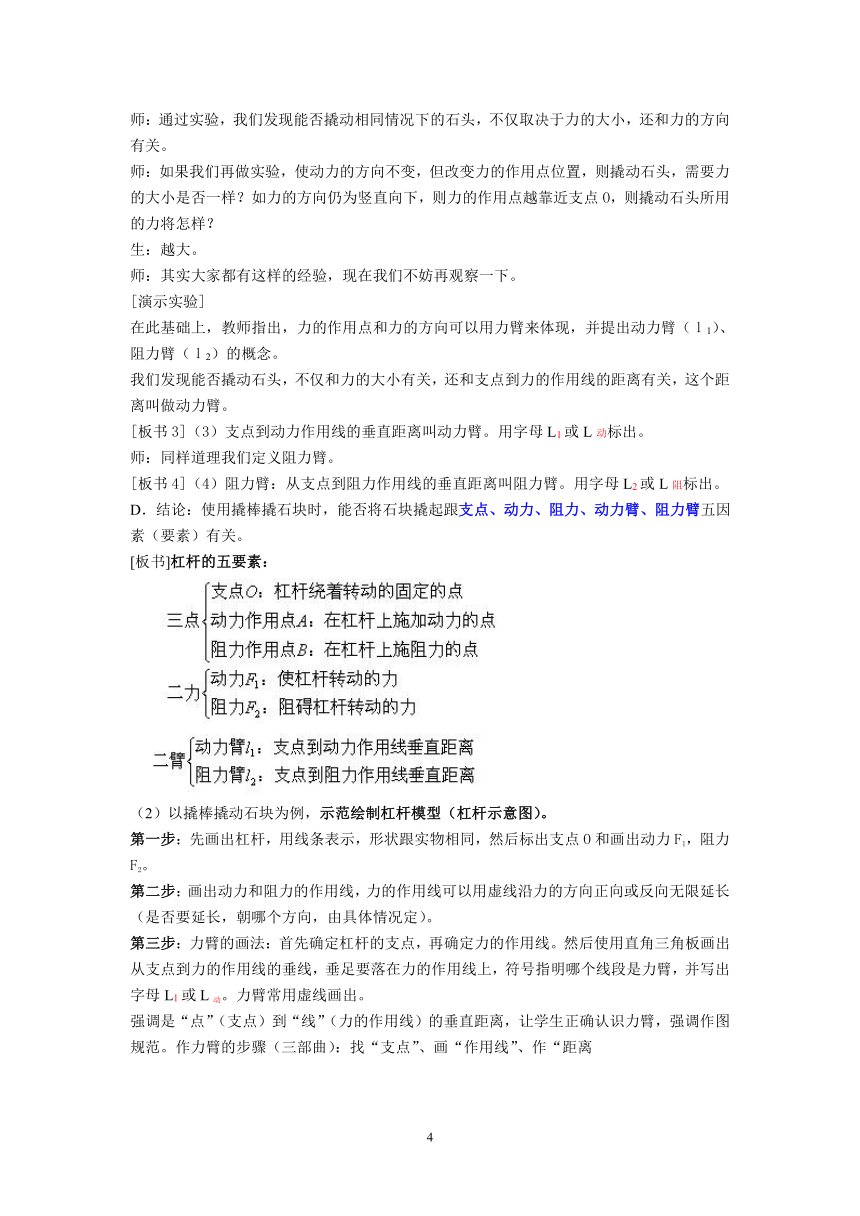
演示并用媒体展示“开瓶器”和“撬棒”的工作过程让学生寻找两者的共性
教师引导:撬棍撬石头,开瓶器开瓶,两者形状虽不同,但工作时它们有什么共同点?
生:都能绕一个点转动(学生还可以分析出是硬棒,也可以在教师的提示下)。
师:除此以外,还有什么共同点呢?它们工作时,为什么会动呢?
生:它们都是在力的作用下。
师:像这样在力的作用下.绕一个固定点转动的硬棒,称之为杠杆。
小结:共同点①在力的作用下能转动。②转动时,有一点固定不动。
引导学生下定义:一根硬棒如果在力的作用下,能绕固定点转动,这根硬棒就叫杠杆。
师:手拿一根铁丝.问它是否杠杆?
生:否,不是硬棒。
师:杠杆是不是一定是直的?“硬棒”如何理解?
观察和演示:抽水机的手柄、切纸的铡刀、剪刀都是杠杆。
师:“硬棒”指在力作用下不易发生形变,可以是直的也可是弯的,形状也可是各种各样,可是方的、圆的等。
学生举例:要求学生根据杠杆定义,从生活生产中熟悉的器械中例举杠杆的实例。
从实例中得出杠杆的形状各种各样:可以是直的,也可以是弯的。
2. 抽象模型,深化概念
(1)探究活动:使用撬棒撬石块时,能否将石块撬起跟哪些因素有关?
A.学生讨论提出假设:跟人用力大小、石块重力、手握处离固定点的距离、石块离固定点的距离等有关。
B.利用弹簧秤、撬棒、石块等器材演示,验证假设。(假设均成立)
在此基础上,教师提出动力(F1)、阻力(F2)、支点(O)的概念。
支点(O):杠杆转动时绕着转动的固定点,用字母O标出。
观察撬棍撬石头的图片
分析讲述:人给撬棍一个力去撬石头,人所施加的促使撬棍转动的力就是动力,石头阻碍撬棍转动的力叫阻力。
[板书] (1)动力:使杠杆转动的力(F1),用字母F1或F动标出。
(2)动力:阻碍杠杆转动的力(F1),用字母F2或用F阻标出。
注意:动力和阻力使杠杆转动方向相反,但它们的方向不一定相反。
力与支点位置关系两种:
1、支点在中间,动力和阻力在两侧,动力和阻力方向相同。
2、支点在一侧,动力和阻力在同侧,动力和阻力方向相反。
C.问题:用弯曲的杠杆代替直的撬棒,或改变人的施力方向,上述结论还成立吗?
D.在原来实验的基础上,改变弹簧称的拉力方向,向学生展示:要使石块撬起,还跟力的方向有关。
[演示实验]
师:通过实验,我们发现能否撬动相同情况下的石头,不仅取决于力的大小,还和力的方向有关。
师:如果我们再做实验,使动力的方向不变,但改变力的作用点位置,则撬动石头,需要力的大小是否一样?如力的方向仍为竖直向下,则力的作用点越靠近支点O,则撬动石头所用的力将怎样?
生:越大。
师:其实大家都有这样的经验,现在我们不妨再观察一下。
[演示实验]
在此基础上,教师指出,力的作用点和力的方向可以用力臂来体现,并提出动力臂(l1)、阻力臂(l2)的概念。
我们发现能否撬动石头,不仅和力的大小有关,还和支点到力的作用线的距离有关,这个距离叫做动力臂。
[板书3](3)支点到动力作用线的垂直距离叫动力臂。用字母L1或L动标出。
师:同样道理我们定义阻力臂。
[板书4](4)阻力臂:从支点到阻力作用线的垂直距离叫阻力臂。用字母L2或L阻标出。
D.结论:使用撬棒撬石块时,能否将石块撬起跟支点、动力、阻力、动力臂、阻力臂五因素(要素)有关。
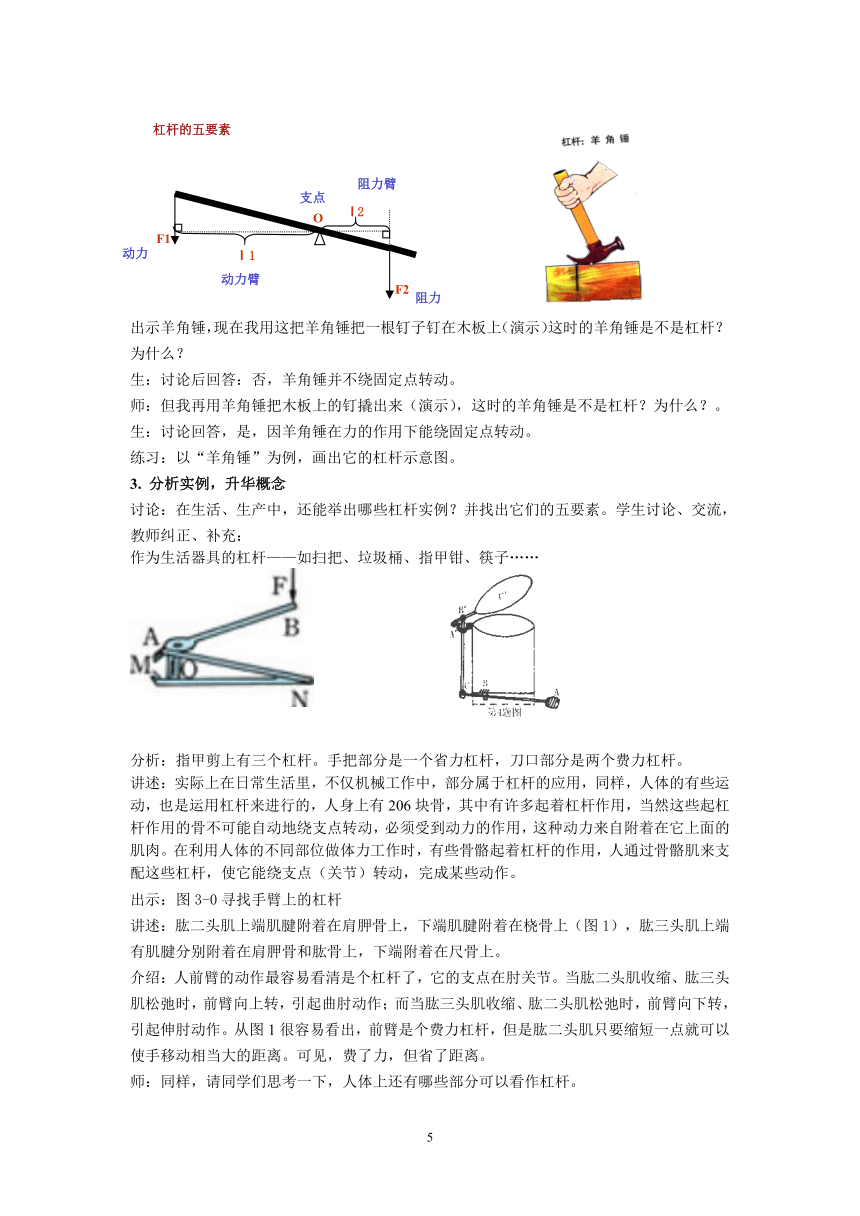
[板书]杠杆的五要素:
(2)以撬棒撬动石块为例,示范绘制杠杆模型(杠杆示意图)。
第一步:先画出杠杆,用线条表示,形状跟实物相同,然后标出支点O和画出动力F1,阻力F2。
第二步:画出动力和阻力的作用线,力的作用线可以用虚线沿力的方向正向或反向无限延长(是否要延长,朝哪个方向,由具体情况定)。
第三步:力臂的画法:首先确定杠杆的支点,再确定力的作用线。然后使用直角三角板画出从支点到力的作用线的垂线,垂足要落在力的作用线上,符号指明哪个线段是力臂,并写出字母L1或L动。力臂常用虚线画出。
强调是“点”(支点)到“线”(力的作用线)的垂直距离,让学生正确认识力臂,强调作图规范。作力臂的步骤(三部曲):找“支点”、画“作用线”、作“距离
出示羊角锤,现在我用这把羊角锤把一根钉子钉在木板上(演示)这时的羊角锤是不是杠杆?为什么?
生:讨论后回答:否,羊角锤并不绕固定点转动。
师:但我再用羊角锤把木板上的钉撬出来(演示),这时的羊角锤是不是杠杆?为什么?。
生:讨论回答,是,因羊角锤在力的作用下能绕固定点转动。
练习:以“羊角锤”为例,画出它的杠杆示意图。
3. 分析实例,升华概念
讨论:在生活、生产中,还能举出哪些杠杆实例?并找出它们的五要素。学生讨论、交流,教师纠正、补充:
作为生活器具的杠杆——如扫把、垃圾桶、指甲钳、筷子……
分析:指甲剪上有三个杠杆。手把部分是一个省力杠杆,刀口部分是两个费力杠杆。
讲述:实际上在日常生活里,不仅机械工作中,部分属于杠杆的应用,同样,人体的有些运动,也是运用杠杆来进行的,人身上有206块骨,其中有许多起着杠杆作用,当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉。在利用人体的不同部位做体力工作时,有些骨骼起着杠杆的作用,人通过骨骼肌来支配这些杠杆,使它能绕支点(关节)转动,完成某些动作。
出示:图3-0寻找手臂上的杠杆
讲述:肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(图1),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上。
介绍:人前臂的动作最容易看清是个杠杆了,它的支点在肘关节。当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作。从图1很容易看出,前臂是个费力杠杆,但是肱二头肌只要缩短一点就可以使手移动相当大的距离。可见,费了力,但省了距离。
师:同样,请同学们思考一下,人体上还有哪些部分可以看作杠杆。
举例:人体中的杠杆——如手臂杠杆、脚部杠杆、头部杠杆……
图4是头部杠杆。
头颅是以寰椎(脊柱之顶)为支点的杠杆。支点前后各有一肌肉群,它们作用于颅骨的力分别以F2和F1表示,头颅所受重力是G。此杠杆属支点居中的第一类杠杆。F1的力矩使头后仰,F2和G的力矩使头前俯。
图3是足部杠杆。
人以足尖着地取立势的情况,足尖着地处是支点,足根后肌肉收缩产生拉力F,人体的压力N则作用在两者之间。此杠杆属阻力居中的第二类杠杆。体重一定,F的力臂越大,即脚越长,则走、跑、跳时足根后的肌肉负担越小。
〖课堂小结〗
今天我们学习了有关杠杆的基本概念,包括什么是杠杆,杠杆的五要素,还学习了画杠杆的示意图的方法,学生谈谈本节课的收获,并对本节课内容进行整合。
1、 杠杆是一根在力的作用下绕某一固定点转动的硬棒
2、 杠杆不一定是直的
3、 找力臂的方法
a) 找出支点
b) 沿动力和阻力的作用方向将力的作用线画出
c) 从支点作力的作用线的垂线就是力臂
〖布置作业〗
1. 完成课后习题1~2题
2. 作业本第3节(一)
3. 调查生活中常见的杠杆
[第2课时 ] 研究杠杆平衡条件
〖复习旧知〗
1. 杠杆的概念和五要素
2. 画杠杆示意图(指甲刀模型)
〖探究学习〗
1. 提出问题
提问:什么叫杠杆平衡?杠杆平衡的条件是什么?
生:杠杆处于静止或匀速转动的状态,称之为杠杆平衡。
回忆:我们利用杠杆工作时,杠杆能否转动起来,跟哪些因素有关?
分析:杠杆平衡与动力和阻力的大小有关,还跟动力臂和阻力臂的长短有关。
整合:当杠杆平衡时,动力和动力臂、阻力和阻力臂之间存在着怎样的关系呢?
2. 建立假设
从二力平衡和逻辑(可能性)两个角度引导学生建立假设。
假设一:F1+L1=F2+L2
假设二:F1–L1=F2–L
假设三:F1/L1=F2/L2
假设四:F1 · L1=F2 · L2
3. 收集证据
步骤1,为什么调节杠杆两端的螺母使杠杆在水平位置平衡?
分析:杠杆处于水平位置可以给动力臂、阻力臂的测量带来方便。由于静止时挂钩码的细绳总是沿竖直方向,故力臂总是沿水平方向。这样,杠杆在水平位置时,就能直接从杠杆的刻度上读出力臂的大小。
步骤2,为什么在杠杆两边挂上不同数量的钩码,调节钩码位置,使杠杆在水平位置重新平衡?
分析:这时杠杆两边受到的力分别等于钩码受到的重力。
思考:我们现在研究一下杠横平衡条件?现有杠杆和支架,如果在一边用细线挂钩码(支架原来平衡),一边不平衡,现在如何使其平衡?
生:找几个同学做几次,使钩码在不同位置时,杠杆平衡,并记下钩码个数和力臂长度(用刻度尺测量力臂长度),记在下表中(使用前调节使杠杆平衡)
(1) 理清实验思路
(2) 选择实验器材
(3) 设计记录表格
(4) 分组实验(教师巡视指导)
4. 验证假设
(1) 数据处理
(2) 误差说明
(3) 初步结论
5. 形成结论
师:大家观察上表数据发现什么特点?总结出杠杆平衡条件。
[板书]:杠杆平衡条件:
这个条件就是阿基米德发现的杠杆原理。
师:如果动力是阻力二倍,那么动力臂是阻力臂的几倍?
杠杆平衡条件的比例表达式:
上式的意义是:动力臂是阻力臂的几倍,动力就是阻力的几分之一。
结论应用:用羊角锤拔铁钉时,手握处离支点近些还是远些更省力 为什么
分析:远些更省力。
巩固练习:
1、作用在杠杆上的动力是20N,阻力是80N,当杠杆平衡时,动力臂和阻力臂之比是
2、完成以下表格
实验次数 动力/F1(N) 动力臂/L1(cm) 阻力/F2(N) 阻力臂/L2(cm)
1 10 2 15
2 2 20 4
例如用抽水机抽水时,加在抽水机手柄上的力是150牛,如果动力臂是60厘米,阻力臂5厘米,即动力臂是阻力臂的4倍,动力就是阻力的四分之一。由此可知抽水机的柄受到的阻力是600牛。
〖课堂小结〗
1. 学生谈收获
2. 对课堂情况(实验)做一概述
〖布置作业〗
1. 完成实验讨论题
2. 课后练习 3
3. 作业本(二)
第3课时 杠杆的应用
(一)引人新课
复习提问:什么叫杠杆平衡?杠杆平衡的条件是什么?
生:杠杆处于静止或匀速转动的状态,称之为杠杆平衡。
杠杆平衡的条件是:动力X动力臂==阻力X阻力臂
利用杠杆平衡条件解释:
1. 杆秤原理
天平是等臂杠杆,动力臂等于阻力臂,根据杠杆的平衡条件可知,动力等于阻力。动力和阻力就是砝码和被称物体对杠杆的压力,其压力的大小在杠杆水平平衡时等于它们各自的物重。根据物体受到的重力跟质量成正比的关系可知,砝码的质量等于被称物体的质量。
2. 跷跷板原理
〖探究学习〗探究杠杆能省力还是费力
(1)理论推导,建立方法
师:由杠杆平衡的比例式可看出:当杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之一。问:由杠杆平衡条件分析:如果动力臂和阻力臂分别在下述三种情况下:
即11>12,11<12,11=12,则动力和阻力存在怎样的关系?
引导学生从杠杆平衡条件F1l1=F2l2出发,导出:
l1 > l2 F1 < F2
l1 = l2 F1 = F2
l1 < l2 F1 > F2
(2)实例分析,理解方法
探究方案:
杠杆(实例) 特点(l1与l2的关系) 省力或费力
1.2.3.4.……
(3)概括杠杆的分类
师:根据动力臂和阻力臂相对大小,可将杠杆分为三种类型。
杠杆的分类 应用
11>12,FI<FZ,省力杠杆 撬棍撬石头,拔钉羊角锤等
11<12,FI>FZ,费力杠杆 镊子,缝纫机踏板等
11==12,FI==FZ,等省杠杆 (不省力也不费力)天平
(4)列举生活和生产中三类杠杆的实例
师:杠杆的应用非常广泛,我们可以根据实际需要来选用不同类型的杠杆,根据杠杆的分类,如果我们需要省力,只要选择什么类型的杠杆?
生:11>12,即动力臂大于阻力臂的杠杆。
省力杠杆:撬棍撬石头,铡刀,羊角锤,开瓶盖的起子,由学生分析这些杠杆的支点,动力,阻力,动力臂,阻力臂,并辨别力臂的大小和动力、阻力的大小。认识这些杠杆属于省力杠杆。
师:虽然利用此类杠杆能够省力,但移动物体过程中,动力、阻力在杠杆上的作用点移动的距离怎样?
小结:由此得到:如果出11>12,在移动物体的过程中,虽然 FI<FZ,但动力作用点移动的距离要大于阻力作用点移动的距离。(还可引导学生得到,动力是阻力的几分之一,动力作用点移动的距离就是阻力作用点移动距离的几倍。)
费力杠杆:缝纫机踏板,铲车的连杆等图。引导学生分析这些实物工作过程中杠杆的示意图,并判别支点,动力,阻力,动力臂和阻力臂。老师接着在实物图旁打出这些实物实际工作过程中的杠杆示意图。
师:这些杠杆的动力臂和阻力臂有怎样的关系?工作时,动力、阻力的关系怎样?
生:11<12,FI>FZ。
师:所以这些杠杆是费力杠杆。
(5)等臂杠杆
师:前面我们讨论了省力杠杆和费力杠杆这两种杠杆的特点及应用,那么另外还有一种杠杆就是等臂杠杆。因为等臂杠杆动力臂等于阻力臂,所以动力等于阻力,这种杠杆既不省力也不费力。教师手拿一架托盘天平,让学生进一步观察它工作时的结构特点,分析它的杠杆结构及支点,动力臂、阻力臂的位置、大小。
师:问:天平工作时,横梁相当于什么?支点在什么位置?动力臂和阻力管有怎样的关系?
生:横梁相当于杠杆,支点在横梁即为杠杆的中点,动力臂等于阻力臂。
师:所以天平即为一等臂杠杆
(6)讨论使用费力杠杆的目的?
以镊子为例:省距离
以缝纫机踏板为例说明,使用费力杠杆费了力却省了距离,给我们的作用带来了方便。以撬箱盖的撬棒为例,这类省力杠杆虽然省力,但是动力移动的距离却比阻力移动的距离长。省了力,费了距离。
小结:由此得到:移动物体的过程中,动力作用点移动的距离要小于阻力作用点移动的距离。(还可引导学生得到,动力是阻力的几倍,动力作用点移动的距离就是阻力作用点移动距离的几分之一)。
结论:省力杠杆 省力费距离
费力杠杆 费力省距离
2. 杠杆使用过程中的能量转化
思考交流:省力杠杆能不能省功?动力在做功过程中消耗的能量转化成了什么形式的能?
3.杠杆平衡条件的应用
(1) 定量计算:例题1(强调解题规范)
例1:如图是铁道检修工用的道钉撬,有关尺寸见图.若
在A点竖直向下作用200牛的力,道钉撬对道钉会产
生多大的力 如果还不能将道钉撬出,在保持手的作
用力和作用点不变的情况下,采用什么方法可以道钉
撬对道钉的作用力
(2) 定性讨论:
例题2(补充):一根粗细均匀的铁条,在其中点处
用细悬挂起来,铁条处于水平平衡。若将右端向内
弯曲(如图),铁条还能水平平衡吗?说明理由。
分析:右端向内弯曲后,铁条右端重心内移,右端作用力的力臂变短,导致左端力与力臂乘积大于右端力与力臂乘积,所以左端下沉.
〖课堂小结〗展示学习目标,对照板书,主要小结杠杆的种类及应用。
分 类 特 点 实 例
不等臂杠杆 省力杠杆(动力F1<阻力F2) 动力臂>阻力臂 撬棒、铡刀、老虎钳等。
费力杠杆(动力F1>阻力F2) 动力臂<阻力臂 踏脚板、理发剪刀等。
等臂杠杆 动力F1=阻力F2 动力臂=阻力臂 天平、定滑轮。
(三)巩固提高
1.我们日常生活中用到的工具:(1)剪铁皮用的剪刀、(2)天平、(3)拔钉子用的羊角榔头、(4)钓鱼杆、(5)镊子。属于省力杠杆的是,属于省距离的杠杆是
答:属于省力杠杆的是:①,③。属于省距离杠杆的是:④、⑤。
2、蹬缝纫机感到费力,脚往前放些好,还是往后放些好?学生结合幻灯讨论。
〖布置作业〗
1.作业本(三)
[第4课时] 滑轮和滑轮组
〖情景引入〗
设疑:每星期一早上,同学们参加升旗仪式的时候,看见旗手向下拉绳子,但红旗却怎样?为什么?
生:红旗上升,因为旗杆顶上有一个滑轮(或轮子)。
出示滑轮,问:再想一下,我们在什么地方还看见过使用滑轮?
生答:拉窗帘的两个角上,起重机吊杆上都装有滑轮。
学生回答后教师补充:窗帘上、旗杆上、起重机上………都用到这种轮子。
师:怎样的装置称为滑轮呢?
[演示]出示单个滑轮,让其转动,让学生仔细观察其结构
并提出滑轮的概念:这种周边有槽,能绕固定轴转动的轮子就是滑轮。
过度:为了了解这些滑轮是如何工作的,我们先来学习最简单的两种滑轮。
〖新课学习〗
一、 定滑轮和动滑轮
(1)观察装置,建立概念
出示定滑轮和动滑轮两种装置,并演示提升重物,要求学生仔细观察,寻求异同。在此基础上,提出定滑轮和动滑轮的概念。
演示:展示课本98页图3-28装置,演示使用定滑轮改变力的方向。
师:甲图滑轮不移动 乙图滑轮与重物一起移动
师:像这种在使用时,转轴固定不动的滑轮叫定滑轮。使用滑轮时,转动轴和重物一起移动的滑动叫动滑轮。
[板书]1.定滑轮,使用时转轴固定不动的滑轮。
2.动滑轮:使用时,转动轴与重物一起移动的滑轮。
学生回答后,整理:相同之处——重物都被提升;不同之处——一个滑轮位置固定不变,一个滑轮随重物向上运动。
(2)实验探索,明确特点
A.讨论:人们为什么要使用定滑轮?为什么要使用动滑轮?
师:日常生活中我们使用定滑轮,它有什么作用呢?想一想,一般情况下,我们要使物体上
升,必须对物体施加什么方向的力?
生:向上。
师:但周一升旗时,旗手向什么方向拉绳子?(生答;向下),但通过定滑轮绳子的另一端挂着的红旗怎样运动?(生答:向上)说明什么?
生:使用定滑轮可以改变力的方向。
师:在使用动滑轮工作时,重物向上运动时,作用在动滑轮绳子上的力的方向怎样?(生答:向上)所以使用动滑轮能否改变力的方向?
生:不能改变力的方向。
B.实验探索动滑轮和定滑轮的特点:
利用钩码、滑轮、弹簧秤、细线、铁架台、刻度尺等工具,按下表进行测量并记录。
<演示>利用定滑轮拉一重物,绳子一端用弹簧秤拉。比较弹簧称道秤的拉力与物体的重力的关系。使用动滑轮时绳子端的拉力与物体的重力有何关系呢?
滑 轮 定滑轮 动滑轮
实验次数 1 2 1 2
钩码重力G(牛)
滑轮重力G0(牛)
自由端拉力F(牛)
钩码上升高度h(厘米)
自由端上升高度s(厘米)
自由端拉力的方向
分析数据可知,弹簧秤的读数相等,使用定滑轮不能省力。但是使用定滑轮可以改变力的方向,
板书:使用定滑轮不能省力,但可以改变力的方向。
师:在使用动滑轮工作时,不能改变力的方向。那么使用动滑轮有什么作用呢?
生:使用动滑轮可以省一半力。
师:使用动滑轮为什么可省力呢?使用动滑轮时,动滑轮和重物的总重有几段绳子承担?
生答:2段。所以每段绳子只承担物重的一半,所以使用动滑轮可以省一半力。
板书:使用动滑轮可以省一半力,但不能改变力的方向。
讨论:如果滑轮没有重力、摩擦也不存在(理想模型),上述实验的结果又会是怎样哪?
由此得出理想滑轮模型的特点:
定滑轮:F = G ;s = h ;能改变力的方向。
动滑轮:F = G/2 ;s = 2h ;不能改变力的方向。
(3)用杠杆原理解释理想滑轮模型的特点
A.讨论:定滑轮、动滑轮能否看作一个杠杆?若可以,指出支点等杠杆的五要素。
教师用媒体展示或板图,让学生说出五要素。
师:由此看出,定滑轮实际可以看作是一个变形的杠杆?它们的动、阻力臂长各是什么?
生:等臂杠杆。动力臂、阻力臂都等于滑轮的半径。
板书:定滑轮的实质:等臂杠杆。
师:根据杠杆的平衡条件,所以定滑轮不能——(生答:省力)。
师:为什么使用动滑轮可以省一半力呢?
提示:此时滑轮绕着转动的点O,则动力臂长为直径,阻力臂长人为半径。
师:由此看出动滑轮实质上也是一个杠杆,它们的动力臂、阻力臂长怎样?
生:动力臂是阻力臂的两倍。
板书:动滑轮的实质:动力臂为阻力臂2倍的杠杆。
师:根据杠杆的平衡条件,在使用动滑轮时,能省一半力。
B.解释理想模型的特点
定滑轮实质是一个等臂杠杆;动滑轮的实质是一个动力臂为阻力臂2倍的杠杆。
过度:定滑轮和动滑轮各有什么优、缺点?实际应用时,常常要求滑轮既省力又方便(能改变力的方向),可是单个的定滑轮和动滑轮都不同时具备这两个特点,所以在日常生活中,我们经常把两者组合起来,使组合后的滑轮具有以上特点。我们把定滑轮和动滑轮组合在一起叫滑轮组。
板书:滑轮组:定滑轮和动滑轮组合在一起叫做滑轮组。
2.滑轮组
(1)认识滑轮组
出示滑轮组让学生观察:由若干个定滑轮和动滑轮组成滑轮组。
(2)探索滑轮组的特点
师:两幅图中,滑轮组在工作时各有几个定滑轮和动滑轮。
生:左图中有2个定滑轮和2个动滑轮。右图中,有2个定滑轮和2个动滑轮。
师:它们的拉力与物重有怎样的关系呢?
利用钩码、滑轮、弹簧秤、细线、铁架台、刻度尺等工具,按下表进行测量并记录。
师:思考一下,左图中,直接连接动滑轮的有几段绳子。
生:有4段。
师:每根绳子上的拉力是否一样?(生答:一样)所以每段绳子的拉力是动滑轮和物体总重的四分之一。
师:同样分析课本右图,直接连接动滑轮的绳子有5段,所以重物和动滑轮的总重由5段绳子承担。所以每段绳子的拉力是动滑轮和物体总重的五分之一。
引导学生分析实验数据归纳得出滑轮组(不考虑摩擦)的特点:使用滑轮组时,动滑轮和重物的总重由n段绳子承担,提起重物所用的动力就是总重的1/n;重物上升h高度,绳子自由端要移动nh距离。
师:再观察一下,两图中,滑轮的个数及种类一样,绳子绕法有何不同。
生:讨论,老师帮助归纳。
教师归纳:如果承担重物的绳子是偶数段,则绳子的始端在定滑轮的钩子上。如果是奇数段,则绳子的始端在动滑轮的钩子上。
师:前面的分析都没有考虑滑轮和轴之间的摩擦,由于摩擦力的存在,实际所用的力还要大些。
(3)例题求解
例:缠绕滑轮组的绳子能承受的最大拉力为300牛,用它
连接如图所示的滑轮组,能否提升重600牛的重物?(已知
动滑轮重20牛,绳子重和摩擦不计)。
〖课堂小结〗
教师根据板书,小结本节课的主要内容,强调定滑轮,动滑轮的特点,实质,滑轮组使用时拉力和物重间的关系。注意观察一下绳子的绕法,和我们刚才小结的规律是否相同?
〖布置作业〗
1. 课后练习 4
2. 作业本(四)
第5课时 机械效率
〖复习导入〗
师:前面我们学习了杠杆、滑轮、滑轮组等简单机械。请思考:用这些工具工作时,有什么好处?
(回答后小结)
师:使用杠杆、滑轮等简单机械,有的可以省力,有的可以省距离,有的可以改变力的方向,
思考:但使用这些机械能否既省力,又省距离呢?
师:如果我们从功的角度去思考这个问题,省力、又省距离即为省功,那么问题即为使用机械能否省功呢?现在我们用实验来研究这个问题。
〖新课学习〗
1.实验分析,建立概念
⑴实验设计:
设问:要研究使用机械是否可以省功,应该如何设计实验?
问:实验的变量是什么?(是否使用机械)
⑵演示实验:
①直接用手提升两个钩码(2.9牛,0.1米),计算所做的功是多少?
②③⑶⑷某人用动滑轮将重为G1的米袋提升h高度,设动滑轮重为G2,不考虑绳子重和滑轮轴心处的摩擦,人所做的功为多大?
思考:如重物上升h,则此情况下动力作用点上升多少?(2h)
绳子自由端通过的距离为多少?作用在绳子自由端的拉力
是多大呢?(G1 + G2)/2
学生思考后解答:
W = Fs = (G1 + G2)/2 × 2h
= G1h + G2h = W1 + W2
思考:利用动滑轮提升物体是时,在人所做的两部分功W1和W2中,哪个功是我们所必需做的?哪个功并不是我们必需做的,但又不得不做的?
学生思考回答后,引出有用功、额外功和总功的概念。
有用功:我们把必需做的那部分功叫做有用功(克服有用阻力所做的功)。W有
额外功:把虽然不需要但又不得不做的那部分功叫做额外功(克服额外阻力所做的功)W外
总功:有用功与额外功的总和叫总功(动力所做的功)。W总==W有 + W外
讨论:
(1) 在上述实例(用动滑轮提米袋)中,如果考虑绳子的重和动滑轮轴心处的摩擦,所做的额外功还有哪些?你希望额外功大些,还是小些?
分析:使用机械时,有用功在总功中占的比例越大越好,有用功在总功中占的比例越大,表明有用功越接近总功,额外功就越少。
(2) 从能量转化的角度,可以对上述实例中的各种功进行如下的分析。怎样描述机械工作时能量的利用率呢?
过度:为了比较有用功在总功中占的比值的大小,我们引人一个新的物理量,叫做机械效率。
定义:有用功跟总功的比值叫做机械效率。
意义:反映有用功在总功中所占的比例,机械效率越大,机械工作时能量的利用率越高。
公式: = W有/W总 ×100%
阅读P102第1自然段,了解一些机械的机械效率:一般的滑轮组机械效率为50%~70%,起重机的效率为40%~50%,抽水机的机械效率为60%~80%。
讨论:
(1) 机械效率总是小于1,为什么?
分析:因为利用机械工作时总要做额外功,额外功不可避免,即额外功不为0。机械效率总小于1即 100%。
(2) 你认为可以从哪些方面提高机械效率?
生:减小额外功。
师:怎样减小额外功。
生:减轻机械自重,减小摩擦等。
师:注意保养机械,保持机械润滑,使其处于良好的运转状态,改进设备,使其更轻巧、合理,充分发挥作用等,对于提高机械的效率有很重要的作用。
(3) 机械工作时,功率越大,是否机械效率就越高呢?
2.测定斜面的机械效率
师:搬运工人要将一个很重的油桶般到汽车上去,但它的力气不够,如果此时旁边有一块木板,他可用什么方法把油桶搬到汽车上去?
生:讨论,将木板一端搁在地上,另一端搁在车上,沿着木板把重物推上去。
师:这样使用的木板我们称之为斜面,斜面也是一种简单机械。为什么使用斜面工人就能将较重的物体搬到车上去呢?我们可以用功的原理分析:
(1)认识斜面
媒体展示斜面,让学生观察,并引导学生结合
生活经验认识斜面——斜面是块斜放的平板,
它是一种省力机械。
师:将物体由底部推到顶端,动力F做功的大小可怎样表示。
生:W==FI
师:把重物举高h所做的功为多少?(生答:W==Gh)。
如果斜面光滑,还有没有其他阻力。(生答:没有)。
师:根据功的原理,上述两个功有怎样的关系。
生:相等。
师:所以FI=Ch
师:由上述可以看出:h<l,F<G,即使用斜面可以省力,而且当斜面长是斜面高的几倍,所用的推力就是物体重的几分之一。可见,要使同一物体升高相同的高度,斜面越长越省力。
幻灯打出:城市高速公路立交桥的引桥很多都是S形的,从力学角度分析,有何作用?
生:讨论,小结。
(2)讨论测量方案
关注:
A. 你测量斜面的机械效率依据(或原理)是什么?
B. 实验中需要进行哪些操作?需要测量哪几个量?各需什么仪器?
C. 如何设计记录表格?
D. 整理你思路,写出实验步骤?
(3)交流,选择设计科学、易于操作的方案进行实验。
(4)计算斜面的机械效率。
(5)进一步探究:机械效率可能跟哪些因素有关?
如何测量滑轮组的机械效率?(设计方案,可在课后完成)
(四)巩固练习
1.判断下列说法是否正确。()
A.越省力的机械,机械效率就越高。
B.做有用功多的机械,机械效率高。
C.做额外功少的机械,机械效率高。
D.总功一定时,有用功多的机械,机械效率高。
2.沿着长4米,高1米的斜面,把重1000牛的物体沿斜面
推到车上去,如果所用的推力是300N,则做的 (1)有用功是多
少?(2)总功是多少?(3)斜面的机械效率是多少?
〖课堂小结〗
〖布置作业〗
1. 课后练习 5
2. 作业本(五)
板书设计
第3节 认识简单机械
一、杠杆:一根硬棒如果在力的作用下,能绕固定点转动,这根硬棒就叫杠杆。
1、杠杆的五要素:
(1)动力:使杠杆转动的力(F1),用字母F1或F动标出。
(2)动力:阻碍杠杆转动的力(F1),用字母F2或用F阻标出。
(3)支点(O):杠杆转动时绕着转动的固定点,用字母O标出。
(4)动力臂:支点到动力作用线的垂直距离叫动力臂。用字母L1或L动标出。
(5)阻力臂:从支点到阻力作用线的垂直距离叫阻力臂。用字母L2或L阻标出。
2、杠杆平衡条件:
3、杠杆的分类 应用
11>12,FI<FZ,省力杠杆 撬棍撬石头,拔钉羊角锤等
11<12,FI>FZ,费力杠杆 镊子,缝纫机踏板等
11==12,FI==FZ,等省杠杆 (不省力也不费力)天平
四、滑轮
(一)定滑轮
1 滑轮的位置固定不变。
2 不省力,可以改变力的方向。
(二)动滑轮
1 滑轮的位置跟被拉动的物体一起运动。
2 可以省一半力,但不能改变用力方向
(三)滑轮组
重物由几段绳子承担,匀速提起重物所用的力就是物体所受重力的几分之一;绳端移动的距离就是重物上升距离的几倍。
五、机械效率:有用功跟总功的比值叫做机械效率。
1、有用功:我们把必需做的那部分功叫做有用功(克服有用阻力所做的功)。W有
2、额外功:把虽然不需要但又不得不做的那部分功叫做额外功(克服额外阻力所做的功)W
3、总功:有用功与额外功的总和叫总功(动力所做的功)。W总==W有 + W外
教学后记:
做好“研究杠杆的平衡条件"的实验是学好本节的关键,必须引导学生自己动手做好这个实验.由于这是一个探索性的实验,教师一定要充分调动学生的积极性,首先让他们展开想象,经历猜想后,再做实验研究.使学生体验科学探究的过程,体会实验是研究问题的一种好方法.在分析实验数据时将观察到的实验现象归纳上升为理论的过程中,教师不可急于给出结论,要引导他们自己总结实验结论,以利于培养学生的分析概括能力.
阻力臂
实验次数 1 2
钩码重力G(牛)
动滑轮重力G0(牛)
自由端拉力F(牛)
钩码上升高度h(厘米)
自由端上升高度s(厘米)
动滑轮增加的势能
米袋增加的势能
额外功
有用功
人提供的能量
总 功
动力臂
阻力
动力
支点
l 2
F2
O
l 1
F1
杠杆的五要素
PAGE
16
第3节 认识简单机械
一、【教材分析】
本节主要学习杠杆、滑轮、滑轮组和斜面等简单机械的特点及工作原理,并通过实例分析引入有用功、额外功和机械效率的概念,让学生了解生活生产中常用简单机械的工作原理,了解使用机械时的能量转化过程及转化效率。教科书把杠杆、滑轮、滑轮组和斜面集中在一起,其优势是易于进行一些基本特点的比较,找出相近的规律,易于对简单机械的整体认识。
在杠杆教学中,要使学生认识什么是杠杆,要从实例及学生的生活体会中,抓住杠杆本质的特征,培养学生的分析能力。杠杆的平衡条件是本节的重点,也是以后学习滑轮的基础,应让学生在实验中探索、分析得到结论,以提高学生的能力。同样,力臂的概念是本节的难点,也是学习杠杆平衡条件及应用的基础,要通过实验,突破这一难点,为以下的学习打下基础。在杠杆的应用部分,应让学生从杠杆的平衡条件结论出发,分析不同杠杆的特征,并结合一些具体实例的分析,把知识学活。
滑轮,许多学生都见过或使用过,但并不一定会仔细研究过它,因此,教材中要求首先让学生仔细观察滑轮,并用实物对照挂图说明滑轮的结构。让学生通过日常生活中滑轮应用实例的分析,并就这些实例提出问题,让学生思考不同的例子中,滑轮可以起什么作用。通过演示实验,使学生知道各种滑轮的特点,并通过对不同滑轮工作时结构的分析,使学生了解滑轮的实质。
二、【课标要求】
1. 认识简单机械的作用
2. 用简单机械原理解释人体的运动,能区分功率和机械效率,从能的传递和转化认识功率和机械效率
活动建议:调查生活中常见的简单机械,探究杠杆的平衡条件
三、【教学目标】
(一)、知识与技能
1. 知道杠杆是一种简单机械,能找出杠杆的支点、动力和阻力、动力臂和阻力臂。
2. 理解杠杆的平衡条件,知道杠杆省力或费力的原因。
3. 了解定滑轮、动滑轮的工作原理,知道定滑轮、动滑轮的实质是一个杠杆,了解滑轮组及其工作原理。
4. 理解机械效率,知道有用功、额外功和总功的区别。
(二)、方法与过程
1.能分析杠杆使用过程中的能量转化过程。
2.学会探究杠杆平衡条件。
3.学习测量简单机械的机械效率。
(三)、情感态度与价值观
了解机械使用的历史及发展过程,认识机械的使用对社会发展的作用。
四、【教学重点】
杠杆及杠杆平衡条件;简单机械的基本特征;渗透使用简单机械时的能量转化。
五、【教学难点】
动力臂和阻力臂;定滑轮、动滑轮的实质是一个杠杆;分析使用机械时的能量转化及机械效率的概念。
六、【课时安排】5课时
内 容 课 时
1. 认识杠杆 1
2. 研究杠杆的平衡条件(包括分组实验) 1
3. 杠杆的应用 1
4. 定滑轮和动滑轮、滑轮组 1
5. 机械效率、测量斜面的机械效率 1
七、【教学过程设计】
[第1课时] 杠杆
〖新课引入〗
利用课件观看图片
(1)古代埃及人用杠杆搬动巨石修金字塔。
(2)游乐园里小朋友玩跷跷板。
(3)农村里从井里提水的压水机的杠杆。
(4)钓鱼。
(4)缝纫机的脚踏板。
现代生产、生活中,人们经常使用简单机械,如钳子、板手、螺丝刀、瓶起子(出示实物)等。有些机械是复杂的,如车床、收割机等复杂机械由许多简单元件组成,其中象杠杆、滑轮等,初中我们主要研究杠杆、滑轮。利用多媒体展示一些机械(如:古代劳动工具——蒸汽机——现代机械),让学生说说使用它们的好处——减轻人的劳动强度,提高工作效率。了解机械的发展历史及机械对经济发展的作用。
引言:任何复杂的机械都是由一些简单的机械组合而成的,学习机械应当从最简单的机械——杠杆开始。阿基米德曾说过这样一句话:“给我一个支点和一根足够长的棍,我就能搬动地球。” 阿基米德虽然没能搬动地球,但是他的话却生动地告诉人们,杠杆能产生巨大的力。那什么是杠杆呢?使用杠杆为什么能产生巨大的力呢?
〖探究学习〗
1. 寻找共性,建立概念
演示并用媒体展示“开瓶器”和“撬棒”的工作过程让学生寻找两者的共性
教师引导:撬棍撬石头,开瓶器开瓶,两者形状虽不同,但工作时它们有什么共同点?
生:都能绕一个点转动(学生还可以分析出是硬棒,也可以在教师的提示下)。
师:除此以外,还有什么共同点呢?它们工作时,为什么会动呢?
生:它们都是在力的作用下。
师:像这样在力的作用下.绕一个固定点转动的硬棒,称之为杠杆。
小结:共同点①在力的作用下能转动。②转动时,有一点固定不动。
引导学生下定义:一根硬棒如果在力的作用下,能绕固定点转动,这根硬棒就叫杠杆。
师:手拿一根铁丝.问它是否杠杆?
生:否,不是硬棒。
师:杠杆是不是一定是直的?“硬棒”如何理解?
观察和演示:抽水机的手柄、切纸的铡刀、剪刀都是杠杆。
师:“硬棒”指在力作用下不易发生形变,可以是直的也可是弯的,形状也可是各种各样,可是方的、圆的等。
学生举例:要求学生根据杠杆定义,从生活生产中熟悉的器械中例举杠杆的实例。
从实例中得出杠杆的形状各种各样:可以是直的,也可以是弯的。
2. 抽象模型,深化概念
(1)探究活动:使用撬棒撬石块时,能否将石块撬起跟哪些因素有关?
A.学生讨论提出假设:跟人用力大小、石块重力、手握处离固定点的距离、石块离固定点的距离等有关。
B.利用弹簧秤、撬棒、石块等器材演示,验证假设。(假设均成立)
在此基础上,教师提出动力(F1)、阻力(F2)、支点(O)的概念。
支点(O):杠杆转动时绕着转动的固定点,用字母O标出。
观察撬棍撬石头的图片
分析讲述:人给撬棍一个力去撬石头,人所施加的促使撬棍转动的力就是动力,石头阻碍撬棍转动的力叫阻力。
[板书] (1)动力:使杠杆转动的力(F1),用字母F1或F动标出。
(2)动力:阻碍杠杆转动的力(F1),用字母F2或用F阻标出。
注意:动力和阻力使杠杆转动方向相反,但它们的方向不一定相反。
力与支点位置关系两种:
1、支点在中间,动力和阻力在两侧,动力和阻力方向相同。
2、支点在一侧,动力和阻力在同侧,动力和阻力方向相反。
C.问题:用弯曲的杠杆代替直的撬棒,或改变人的施力方向,上述结论还成立吗?
D.在原来实验的基础上,改变弹簧称的拉力方向,向学生展示:要使石块撬起,还跟力的方向有关。
[演示实验]
师:通过实验,我们发现能否撬动相同情况下的石头,不仅取决于力的大小,还和力的方向有关。
师:如果我们再做实验,使动力的方向不变,但改变力的作用点位置,则撬动石头,需要力的大小是否一样?如力的方向仍为竖直向下,则力的作用点越靠近支点O,则撬动石头所用的力将怎样?
生:越大。
师:其实大家都有这样的经验,现在我们不妨再观察一下。
[演示实验]
在此基础上,教师指出,力的作用点和力的方向可以用力臂来体现,并提出动力臂(l1)、阻力臂(l2)的概念。
我们发现能否撬动石头,不仅和力的大小有关,还和支点到力的作用线的距离有关,这个距离叫做动力臂。
[板书3](3)支点到动力作用线的垂直距离叫动力臂。用字母L1或L动标出。
师:同样道理我们定义阻力臂。
[板书4](4)阻力臂:从支点到阻力作用线的垂直距离叫阻力臂。用字母L2或L阻标出。
D.结论:使用撬棒撬石块时,能否将石块撬起跟支点、动力、阻力、动力臂、阻力臂五因素(要素)有关。
[板书]杠杆的五要素:
(2)以撬棒撬动石块为例,示范绘制杠杆模型(杠杆示意图)。
第一步:先画出杠杆,用线条表示,形状跟实物相同,然后标出支点O和画出动力F1,阻力F2。
第二步:画出动力和阻力的作用线,力的作用线可以用虚线沿力的方向正向或反向无限延长(是否要延长,朝哪个方向,由具体情况定)。
第三步:力臂的画法:首先确定杠杆的支点,再确定力的作用线。然后使用直角三角板画出从支点到力的作用线的垂线,垂足要落在力的作用线上,符号指明哪个线段是力臂,并写出字母L1或L动。力臂常用虚线画出。
强调是“点”(支点)到“线”(力的作用线)的垂直距离,让学生正确认识力臂,强调作图规范。作力臂的步骤(三部曲):找“支点”、画“作用线”、作“距离
出示羊角锤,现在我用这把羊角锤把一根钉子钉在木板上(演示)这时的羊角锤是不是杠杆?为什么?
生:讨论后回答:否,羊角锤并不绕固定点转动。
师:但我再用羊角锤把木板上的钉撬出来(演示),这时的羊角锤是不是杠杆?为什么?。
生:讨论回答,是,因羊角锤在力的作用下能绕固定点转动。
练习:以“羊角锤”为例,画出它的杠杆示意图。
3. 分析实例,升华概念
讨论:在生活、生产中,还能举出哪些杠杆实例?并找出它们的五要素。学生讨论、交流,教师纠正、补充:
作为生活器具的杠杆——如扫把、垃圾桶、指甲钳、筷子……
分析:指甲剪上有三个杠杆。手把部分是一个省力杠杆,刀口部分是两个费力杠杆。
讲述:实际上在日常生活里,不仅机械工作中,部分属于杠杆的应用,同样,人体的有些运动,也是运用杠杆来进行的,人身上有206块骨,其中有许多起着杠杆作用,当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉。在利用人体的不同部位做体力工作时,有些骨骼起着杠杆的作用,人通过骨骼肌来支配这些杠杆,使它能绕支点(关节)转动,完成某些动作。
出示:图3-0寻找手臂上的杠杆
讲述:肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(图1),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上。
介绍:人前臂的动作最容易看清是个杠杆了,它的支点在肘关节。当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作。从图1很容易看出,前臂是个费力杠杆,但是肱二头肌只要缩短一点就可以使手移动相当大的距离。可见,费了力,但省了距离。
师:同样,请同学们思考一下,人体上还有哪些部分可以看作杠杆。
举例:人体中的杠杆——如手臂杠杆、脚部杠杆、头部杠杆……
图4是头部杠杆。
头颅是以寰椎(脊柱之顶)为支点的杠杆。支点前后各有一肌肉群,它们作用于颅骨的力分别以F2和F1表示,头颅所受重力是G。此杠杆属支点居中的第一类杠杆。F1的力矩使头后仰,F2和G的力矩使头前俯。
图3是足部杠杆。
人以足尖着地取立势的情况,足尖着地处是支点,足根后肌肉收缩产生拉力F,人体的压力N则作用在两者之间。此杠杆属阻力居中的第二类杠杆。体重一定,F的力臂越大,即脚越长,则走、跑、跳时足根后的肌肉负担越小。
〖课堂小结〗
今天我们学习了有关杠杆的基本概念,包括什么是杠杆,杠杆的五要素,还学习了画杠杆的示意图的方法,学生谈谈本节课的收获,并对本节课内容进行整合。
1、 杠杆是一根在力的作用下绕某一固定点转动的硬棒
2、 杠杆不一定是直的
3、 找力臂的方法
a) 找出支点
b) 沿动力和阻力的作用方向将力的作用线画出
c) 从支点作力的作用线的垂线就是力臂
〖布置作业〗
1. 完成课后习题1~2题
2. 作业本第3节(一)
3. 调查生活中常见的杠杆
[第2课时 ] 研究杠杆平衡条件
〖复习旧知〗
1. 杠杆的概念和五要素
2. 画杠杆示意图(指甲刀模型)
〖探究学习〗
1. 提出问题
提问:什么叫杠杆平衡?杠杆平衡的条件是什么?
生:杠杆处于静止或匀速转动的状态,称之为杠杆平衡。
回忆:我们利用杠杆工作时,杠杆能否转动起来,跟哪些因素有关?
分析:杠杆平衡与动力和阻力的大小有关,还跟动力臂和阻力臂的长短有关。
整合:当杠杆平衡时,动力和动力臂、阻力和阻力臂之间存在着怎样的关系呢?
2. 建立假设
从二力平衡和逻辑(可能性)两个角度引导学生建立假设。
假设一:F1+L1=F2+L2
假设二:F1–L1=F2–L
假设三:F1/L1=F2/L2
假设四:F1 · L1=F2 · L2
3. 收集证据
步骤1,为什么调节杠杆两端的螺母使杠杆在水平位置平衡?
分析:杠杆处于水平位置可以给动力臂、阻力臂的测量带来方便。由于静止时挂钩码的细绳总是沿竖直方向,故力臂总是沿水平方向。这样,杠杆在水平位置时,就能直接从杠杆的刻度上读出力臂的大小。
步骤2,为什么在杠杆两边挂上不同数量的钩码,调节钩码位置,使杠杆在水平位置重新平衡?
分析:这时杠杆两边受到的力分别等于钩码受到的重力。
思考:我们现在研究一下杠横平衡条件?现有杠杆和支架,如果在一边用细线挂钩码(支架原来平衡),一边不平衡,现在如何使其平衡?
生:找几个同学做几次,使钩码在不同位置时,杠杆平衡,并记下钩码个数和力臂长度(用刻度尺测量力臂长度),记在下表中(使用前调节使杠杆平衡)
(1) 理清实验思路
(2) 选择实验器材
(3) 设计记录表格
(4) 分组实验(教师巡视指导)
4. 验证假设
(1) 数据处理
(2) 误差说明
(3) 初步结论
5. 形成结论
师:大家观察上表数据发现什么特点?总结出杠杆平衡条件。
[板书]:杠杆平衡条件:
这个条件就是阿基米德发现的杠杆原理。
师:如果动力是阻力二倍,那么动力臂是阻力臂的几倍?
杠杆平衡条件的比例表达式:
上式的意义是:动力臂是阻力臂的几倍,动力就是阻力的几分之一。
结论应用:用羊角锤拔铁钉时,手握处离支点近些还是远些更省力 为什么
分析:远些更省力。
巩固练习:
1、作用在杠杆上的动力是20N,阻力是80N,当杠杆平衡时,动力臂和阻力臂之比是
2、完成以下表格
实验次数 动力/F1(N) 动力臂/L1(cm) 阻力/F2(N) 阻力臂/L2(cm)
1 10 2 15
2 2 20 4
例如用抽水机抽水时,加在抽水机手柄上的力是150牛,如果动力臂是60厘米,阻力臂5厘米,即动力臂是阻力臂的4倍,动力就是阻力的四分之一。由此可知抽水机的柄受到的阻力是600牛。
〖课堂小结〗
1. 学生谈收获
2. 对课堂情况(实验)做一概述
〖布置作业〗
1. 完成实验讨论题
2. 课后练习 3
3. 作业本(二)
第3课时 杠杆的应用
(一)引人新课
复习提问:什么叫杠杆平衡?杠杆平衡的条件是什么?
生:杠杆处于静止或匀速转动的状态,称之为杠杆平衡。
杠杆平衡的条件是:动力X动力臂==阻力X阻力臂
利用杠杆平衡条件解释:
1. 杆秤原理
天平是等臂杠杆,动力臂等于阻力臂,根据杠杆的平衡条件可知,动力等于阻力。动力和阻力就是砝码和被称物体对杠杆的压力,其压力的大小在杠杆水平平衡时等于它们各自的物重。根据物体受到的重力跟质量成正比的关系可知,砝码的质量等于被称物体的质量。
2. 跷跷板原理
〖探究学习〗探究杠杆能省力还是费力
(1)理论推导,建立方法
师:由杠杆平衡的比例式可看出:当杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之一。问:由杠杆平衡条件分析:如果动力臂和阻力臂分别在下述三种情况下:
即11>12,11<12,11=12,则动力和阻力存在怎样的关系?
引导学生从杠杆平衡条件F1l1=F2l2出发,导出:
l1 > l2 F1 < F2
l1 = l2 F1 = F2
l1 < l2 F1 > F2
(2)实例分析,理解方法
探究方案:
杠杆(实例) 特点(l1与l2的关系) 省力或费力
1.2.3.4.……
(3)概括杠杆的分类
师:根据动力臂和阻力臂相对大小,可将杠杆分为三种类型。
杠杆的分类 应用
11>12,FI<FZ,省力杠杆 撬棍撬石头,拔钉羊角锤等
11<12,FI>FZ,费力杠杆 镊子,缝纫机踏板等
11==12,FI==FZ,等省杠杆 (不省力也不费力)天平
(4)列举生活和生产中三类杠杆的实例
师:杠杆的应用非常广泛,我们可以根据实际需要来选用不同类型的杠杆,根据杠杆的分类,如果我们需要省力,只要选择什么类型的杠杆?
生:11>12,即动力臂大于阻力臂的杠杆。
省力杠杆:撬棍撬石头,铡刀,羊角锤,开瓶盖的起子,由学生分析这些杠杆的支点,动力,阻力,动力臂,阻力臂,并辨别力臂的大小和动力、阻力的大小。认识这些杠杆属于省力杠杆。
师:虽然利用此类杠杆能够省力,但移动物体过程中,动力、阻力在杠杆上的作用点移动的距离怎样?
小结:由此得到:如果出11>12,在移动物体的过程中,虽然 FI<FZ,但动力作用点移动的距离要大于阻力作用点移动的距离。(还可引导学生得到,动力是阻力的几分之一,动力作用点移动的距离就是阻力作用点移动距离的几倍。)
费力杠杆:缝纫机踏板,铲车的连杆等图。引导学生分析这些实物工作过程中杠杆的示意图,并判别支点,动力,阻力,动力臂和阻力臂。老师接着在实物图旁打出这些实物实际工作过程中的杠杆示意图。
师:这些杠杆的动力臂和阻力臂有怎样的关系?工作时,动力、阻力的关系怎样?
生:11<12,FI>FZ。
师:所以这些杠杆是费力杠杆。
(5)等臂杠杆
师:前面我们讨论了省力杠杆和费力杠杆这两种杠杆的特点及应用,那么另外还有一种杠杆就是等臂杠杆。因为等臂杠杆动力臂等于阻力臂,所以动力等于阻力,这种杠杆既不省力也不费力。教师手拿一架托盘天平,让学生进一步观察它工作时的结构特点,分析它的杠杆结构及支点,动力臂、阻力臂的位置、大小。
师:问:天平工作时,横梁相当于什么?支点在什么位置?动力臂和阻力管有怎样的关系?
生:横梁相当于杠杆,支点在横梁即为杠杆的中点,动力臂等于阻力臂。
师:所以天平即为一等臂杠杆
(6)讨论使用费力杠杆的目的?
以镊子为例:省距离
以缝纫机踏板为例说明,使用费力杠杆费了力却省了距离,给我们的作用带来了方便。以撬箱盖的撬棒为例,这类省力杠杆虽然省力,但是动力移动的距离却比阻力移动的距离长。省了力,费了距离。
小结:由此得到:移动物体的过程中,动力作用点移动的距离要小于阻力作用点移动的距离。(还可引导学生得到,动力是阻力的几倍,动力作用点移动的距离就是阻力作用点移动距离的几分之一)。
结论:省力杠杆 省力费距离
费力杠杆 费力省距离
2. 杠杆使用过程中的能量转化
思考交流:省力杠杆能不能省功?动力在做功过程中消耗的能量转化成了什么形式的能?
3.杠杆平衡条件的应用
(1) 定量计算:例题1(强调解题规范)
例1:如图是铁道检修工用的道钉撬,有关尺寸见图.若
在A点竖直向下作用200牛的力,道钉撬对道钉会产
生多大的力 如果还不能将道钉撬出,在保持手的作
用力和作用点不变的情况下,采用什么方法可以道钉
撬对道钉的作用力
(2) 定性讨论:
例题2(补充):一根粗细均匀的铁条,在其中点处
用细悬挂起来,铁条处于水平平衡。若将右端向内
弯曲(如图),铁条还能水平平衡吗?说明理由。
分析:右端向内弯曲后,铁条右端重心内移,右端作用力的力臂变短,导致左端力与力臂乘积大于右端力与力臂乘积,所以左端下沉.
〖课堂小结〗展示学习目标,对照板书,主要小结杠杆的种类及应用。
分 类 特 点 实 例
不等臂杠杆 省力杠杆(动力F1<阻力F2) 动力臂>阻力臂 撬棒、铡刀、老虎钳等。
费力杠杆(动力F1>阻力F2) 动力臂<阻力臂 踏脚板、理发剪刀等。
等臂杠杆 动力F1=阻力F2 动力臂=阻力臂 天平、定滑轮。
(三)巩固提高
1.我们日常生活中用到的工具:(1)剪铁皮用的剪刀、(2)天平、(3)拔钉子用的羊角榔头、(4)钓鱼杆、(5)镊子。属于省力杠杆的是,属于省距离的杠杆是
答:属于省力杠杆的是:①,③。属于省距离杠杆的是:④、⑤。
2、蹬缝纫机感到费力,脚往前放些好,还是往后放些好?学生结合幻灯讨论。
〖布置作业〗
1.作业本(三)
[第4课时] 滑轮和滑轮组
〖情景引入〗
设疑:每星期一早上,同学们参加升旗仪式的时候,看见旗手向下拉绳子,但红旗却怎样?为什么?
生:红旗上升,因为旗杆顶上有一个滑轮(或轮子)。
出示滑轮,问:再想一下,我们在什么地方还看见过使用滑轮?
生答:拉窗帘的两个角上,起重机吊杆上都装有滑轮。
学生回答后教师补充:窗帘上、旗杆上、起重机上………都用到这种轮子。
师:怎样的装置称为滑轮呢?
[演示]出示单个滑轮,让其转动,让学生仔细观察其结构
并提出滑轮的概念:这种周边有槽,能绕固定轴转动的轮子就是滑轮。
过度:为了了解这些滑轮是如何工作的,我们先来学习最简单的两种滑轮。
〖新课学习〗
一、 定滑轮和动滑轮
(1)观察装置,建立概念
出示定滑轮和动滑轮两种装置,并演示提升重物,要求学生仔细观察,寻求异同。在此基础上,提出定滑轮和动滑轮的概念。
演示:展示课本98页图3-28装置,演示使用定滑轮改变力的方向。
师:甲图滑轮不移动 乙图滑轮与重物一起移动
师:像这种在使用时,转轴固定不动的滑轮叫定滑轮。使用滑轮时,转动轴和重物一起移动的滑动叫动滑轮。
[板书]1.定滑轮,使用时转轴固定不动的滑轮。
2.动滑轮:使用时,转动轴与重物一起移动的滑轮。
学生回答后,整理:相同之处——重物都被提升;不同之处——一个滑轮位置固定不变,一个滑轮随重物向上运动。
(2)实验探索,明确特点
A.讨论:人们为什么要使用定滑轮?为什么要使用动滑轮?
师:日常生活中我们使用定滑轮,它有什么作用呢?想一想,一般情况下,我们要使物体上
升,必须对物体施加什么方向的力?
生:向上。
师:但周一升旗时,旗手向什么方向拉绳子?(生答;向下),但通过定滑轮绳子的另一端挂着的红旗怎样运动?(生答:向上)说明什么?
生:使用定滑轮可以改变力的方向。
师:在使用动滑轮工作时,重物向上运动时,作用在动滑轮绳子上的力的方向怎样?(生答:向上)所以使用动滑轮能否改变力的方向?
生:不能改变力的方向。
B.实验探索动滑轮和定滑轮的特点:
利用钩码、滑轮、弹簧秤、细线、铁架台、刻度尺等工具,按下表进行测量并记录。
<演示>利用定滑轮拉一重物,绳子一端用弹簧秤拉。比较弹簧称道秤的拉力与物体的重力的关系。使用动滑轮时绳子端的拉力与物体的重力有何关系呢?
滑 轮 定滑轮 动滑轮
实验次数 1 2 1 2
钩码重力G(牛)
滑轮重力G0(牛)
自由端拉力F(牛)
钩码上升高度h(厘米)
自由端上升高度s(厘米)
自由端拉力的方向
分析数据可知,弹簧秤的读数相等,使用定滑轮不能省力。但是使用定滑轮可以改变力的方向,
板书:使用定滑轮不能省力,但可以改变力的方向。
师:在使用动滑轮工作时,不能改变力的方向。那么使用动滑轮有什么作用呢?
生:使用动滑轮可以省一半力。
师:使用动滑轮为什么可省力呢?使用动滑轮时,动滑轮和重物的总重有几段绳子承担?
生答:2段。所以每段绳子只承担物重的一半,所以使用动滑轮可以省一半力。
板书:使用动滑轮可以省一半力,但不能改变力的方向。
讨论:如果滑轮没有重力、摩擦也不存在(理想模型),上述实验的结果又会是怎样哪?
由此得出理想滑轮模型的特点:
定滑轮:F = G ;s = h ;能改变力的方向。
动滑轮:F = G/2 ;s = 2h ;不能改变力的方向。
(3)用杠杆原理解释理想滑轮模型的特点
A.讨论:定滑轮、动滑轮能否看作一个杠杆?若可以,指出支点等杠杆的五要素。
教师用媒体展示或板图,让学生说出五要素。
师:由此看出,定滑轮实际可以看作是一个变形的杠杆?它们的动、阻力臂长各是什么?
生:等臂杠杆。动力臂、阻力臂都等于滑轮的半径。
板书:定滑轮的实质:等臂杠杆。
师:根据杠杆的平衡条件,所以定滑轮不能——(生答:省力)。
师:为什么使用动滑轮可以省一半力呢?
提示:此时滑轮绕着转动的点O,则动力臂长为直径,阻力臂长人为半径。
师:由此看出动滑轮实质上也是一个杠杆,它们的动力臂、阻力臂长怎样?
生:动力臂是阻力臂的两倍。
板书:动滑轮的实质:动力臂为阻力臂2倍的杠杆。
师:根据杠杆的平衡条件,在使用动滑轮时,能省一半力。
B.解释理想模型的特点
定滑轮实质是一个等臂杠杆;动滑轮的实质是一个动力臂为阻力臂2倍的杠杆。
过度:定滑轮和动滑轮各有什么优、缺点?实际应用时,常常要求滑轮既省力又方便(能改变力的方向),可是单个的定滑轮和动滑轮都不同时具备这两个特点,所以在日常生活中,我们经常把两者组合起来,使组合后的滑轮具有以上特点。我们把定滑轮和动滑轮组合在一起叫滑轮组。
板书:滑轮组:定滑轮和动滑轮组合在一起叫做滑轮组。
2.滑轮组
(1)认识滑轮组
出示滑轮组让学生观察:由若干个定滑轮和动滑轮组成滑轮组。
(2)探索滑轮组的特点
师:两幅图中,滑轮组在工作时各有几个定滑轮和动滑轮。
生:左图中有2个定滑轮和2个动滑轮。右图中,有2个定滑轮和2个动滑轮。
师:它们的拉力与物重有怎样的关系呢?
利用钩码、滑轮、弹簧秤、细线、铁架台、刻度尺等工具,按下表进行测量并记录。
师:思考一下,左图中,直接连接动滑轮的有几段绳子。
生:有4段。
师:每根绳子上的拉力是否一样?(生答:一样)所以每段绳子的拉力是动滑轮和物体总重的四分之一。
师:同样分析课本右图,直接连接动滑轮的绳子有5段,所以重物和动滑轮的总重由5段绳子承担。所以每段绳子的拉力是动滑轮和物体总重的五分之一。
引导学生分析实验数据归纳得出滑轮组(不考虑摩擦)的特点:使用滑轮组时,动滑轮和重物的总重由n段绳子承担,提起重物所用的动力就是总重的1/n;重物上升h高度,绳子自由端要移动nh距离。
师:再观察一下,两图中,滑轮的个数及种类一样,绳子绕法有何不同。
生:讨论,老师帮助归纳。
教师归纳:如果承担重物的绳子是偶数段,则绳子的始端在定滑轮的钩子上。如果是奇数段,则绳子的始端在动滑轮的钩子上。
师:前面的分析都没有考虑滑轮和轴之间的摩擦,由于摩擦力的存在,实际所用的力还要大些。
(3)例题求解
例:缠绕滑轮组的绳子能承受的最大拉力为300牛,用它
连接如图所示的滑轮组,能否提升重600牛的重物?(已知
动滑轮重20牛,绳子重和摩擦不计)。
〖课堂小结〗
教师根据板书,小结本节课的主要内容,强调定滑轮,动滑轮的特点,实质,滑轮组使用时拉力和物重间的关系。注意观察一下绳子的绕法,和我们刚才小结的规律是否相同?
〖布置作业〗
1. 课后练习 4
2. 作业本(四)
第5课时 机械效率
〖复习导入〗
师:前面我们学习了杠杆、滑轮、滑轮组等简单机械。请思考:用这些工具工作时,有什么好处?
(回答后小结)
师:使用杠杆、滑轮等简单机械,有的可以省力,有的可以省距离,有的可以改变力的方向,
思考:但使用这些机械能否既省力,又省距离呢?
师:如果我们从功的角度去思考这个问题,省力、又省距离即为省功,那么问题即为使用机械能否省功呢?现在我们用实验来研究这个问题。
〖新课学习〗
1.实验分析,建立概念
⑴实验设计:
设问:要研究使用机械是否可以省功,应该如何设计实验?
问:实验的变量是什么?(是否使用机械)
⑵演示实验:
①直接用手提升两个钩码(2.9牛,0.1米),计算所做的功是多少?
②③⑶⑷某人用动滑轮将重为G1的米袋提升h高度,设动滑轮重为G2,不考虑绳子重和滑轮轴心处的摩擦,人所做的功为多大?
思考:如重物上升h,则此情况下动力作用点上升多少?(2h)
绳子自由端通过的距离为多少?作用在绳子自由端的拉力
是多大呢?(G1 + G2)/2
学生思考后解答:
W = Fs = (G1 + G2)/2 × 2h
= G1h + G2h = W1 + W2
思考:利用动滑轮提升物体是时,在人所做的两部分功W1和W2中,哪个功是我们所必需做的?哪个功并不是我们必需做的,但又不得不做的?
学生思考回答后,引出有用功、额外功和总功的概念。
有用功:我们把必需做的那部分功叫做有用功(克服有用阻力所做的功)。W有
额外功:把虽然不需要但又不得不做的那部分功叫做额外功(克服额外阻力所做的功)W外
总功:有用功与额外功的总和叫总功(动力所做的功)。W总==W有 + W外
讨论:
(1) 在上述实例(用动滑轮提米袋)中,如果考虑绳子的重和动滑轮轴心处的摩擦,所做的额外功还有哪些?你希望额外功大些,还是小些?
分析:使用机械时,有用功在总功中占的比例越大越好,有用功在总功中占的比例越大,表明有用功越接近总功,额外功就越少。
(2) 从能量转化的角度,可以对上述实例中的各种功进行如下的分析。怎样描述机械工作时能量的利用率呢?
过度:为了比较有用功在总功中占的比值的大小,我们引人一个新的物理量,叫做机械效率。
定义:有用功跟总功的比值叫做机械效率。
意义:反映有用功在总功中所占的比例,机械效率越大,机械工作时能量的利用率越高。
公式: = W有/W总 ×100%
阅读P102第1自然段,了解一些机械的机械效率:一般的滑轮组机械效率为50%~70%,起重机的效率为40%~50%,抽水机的机械效率为60%~80%。
讨论:
(1) 机械效率总是小于1,为什么?
分析:因为利用机械工作时总要做额外功,额外功不可避免,即额外功不为0。机械效率总小于1即 100%。
(2) 你认为可以从哪些方面提高机械效率?
生:减小额外功。
师:怎样减小额外功。
生:减轻机械自重,减小摩擦等。
师:注意保养机械,保持机械润滑,使其处于良好的运转状态,改进设备,使其更轻巧、合理,充分发挥作用等,对于提高机械的效率有很重要的作用。
(3) 机械工作时,功率越大,是否机械效率就越高呢?
2.测定斜面的机械效率
师:搬运工人要将一个很重的油桶般到汽车上去,但它的力气不够,如果此时旁边有一块木板,他可用什么方法把油桶搬到汽车上去?
生:讨论,将木板一端搁在地上,另一端搁在车上,沿着木板把重物推上去。
师:这样使用的木板我们称之为斜面,斜面也是一种简单机械。为什么使用斜面工人就能将较重的物体搬到车上去呢?我们可以用功的原理分析:
(1)认识斜面
媒体展示斜面,让学生观察,并引导学生结合
生活经验认识斜面——斜面是块斜放的平板,
它是一种省力机械。
师:将物体由底部推到顶端,动力F做功的大小可怎样表示。
生:W==FI
师:把重物举高h所做的功为多少?(生答:W==Gh)。
如果斜面光滑,还有没有其他阻力。(生答:没有)。
师:根据功的原理,上述两个功有怎样的关系。
生:相等。
师:所以FI=Ch
师:由上述可以看出:h<l,F<G,即使用斜面可以省力,而且当斜面长是斜面高的几倍,所用的推力就是物体重的几分之一。可见,要使同一物体升高相同的高度,斜面越长越省力。
幻灯打出:城市高速公路立交桥的引桥很多都是S形的,从力学角度分析,有何作用?
生:讨论,小结。
(2)讨论测量方案
关注:
A. 你测量斜面的机械效率依据(或原理)是什么?
B. 实验中需要进行哪些操作?需要测量哪几个量?各需什么仪器?
C. 如何设计记录表格?
D. 整理你思路,写出实验步骤?
(3)交流,选择设计科学、易于操作的方案进行实验。
(4)计算斜面的机械效率。
(5)进一步探究:机械效率可能跟哪些因素有关?
如何测量滑轮组的机械效率?(设计方案,可在课后完成)
(四)巩固练习
1.判断下列说法是否正确。()
A.越省力的机械,机械效率就越高。
B.做有用功多的机械,机械效率高。
C.做额外功少的机械,机械效率高。
D.总功一定时,有用功多的机械,机械效率高。
2.沿着长4米,高1米的斜面,把重1000牛的物体沿斜面
推到车上去,如果所用的推力是300N,则做的 (1)有用功是多
少?(2)总功是多少?(3)斜面的机械效率是多少?
〖课堂小结〗
〖布置作业〗
1. 课后练习 5
2. 作业本(五)
板书设计
第3节 认识简单机械
一、杠杆:一根硬棒如果在力的作用下,能绕固定点转动,这根硬棒就叫杠杆。
1、杠杆的五要素:
(1)动力:使杠杆转动的力(F1),用字母F1或F动标出。
(2)动力:阻碍杠杆转动的力(F1),用字母F2或用F阻标出。
(3)支点(O):杠杆转动时绕着转动的固定点,用字母O标出。
(4)动力臂:支点到动力作用线的垂直距离叫动力臂。用字母L1或L动标出。
(5)阻力臂:从支点到阻力作用线的垂直距离叫阻力臂。用字母L2或L阻标出。
2、杠杆平衡条件:
3、杠杆的分类 应用
11>12,FI<FZ,省力杠杆 撬棍撬石头,拔钉羊角锤等
11<12,FI>FZ,费力杠杆 镊子,缝纫机踏板等
11==12,FI==FZ,等省杠杆 (不省力也不费力)天平
四、滑轮
(一)定滑轮
1 滑轮的位置固定不变。
2 不省力,可以改变力的方向。
(二)动滑轮
1 滑轮的位置跟被拉动的物体一起运动。
2 可以省一半力,但不能改变用力方向
(三)滑轮组
重物由几段绳子承担,匀速提起重物所用的力就是物体所受重力的几分之一;绳端移动的距离就是重物上升距离的几倍。
五、机械效率:有用功跟总功的比值叫做机械效率。
1、有用功:我们把必需做的那部分功叫做有用功(克服有用阻力所做的功)。W有
2、额外功:把虽然不需要但又不得不做的那部分功叫做额外功(克服额外阻力所做的功)W
3、总功:有用功与额外功的总和叫总功(动力所做的功)。W总==W有 + W外
教学后记:
做好“研究杠杆的平衡条件"的实验是学好本节的关键,必须引导学生自己动手做好这个实验.由于这是一个探索性的实验,教师一定要充分调动学生的积极性,首先让他们展开想象,经历猜想后,再做实验研究.使学生体验科学探究的过程,体会实验是研究问题的一种好方法.在分析实验数据时将观察到的实验现象归纳上升为理论的过程中,教师不可急于给出结论,要引导他们自己总结实验结论,以利于培养学生的分析概括能力.
阻力臂
实验次数 1 2
钩码重力G(牛)
动滑轮重力G0(牛)
自由端拉力F(牛)
钩码上升高度h(厘米)
自由端上升高度s(厘米)
动滑轮增加的势能
米袋增加的势能
额外功
有用功
人提供的能量
总 功
动力臂
阻力
动力
支点
l 2
F2
O
l 1
F1
杠杆的五要素
PAGE
16
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿