人与机械考点说明
图片预览
文档简介
《人与机械》考点说明
班级:______ 姓名:______
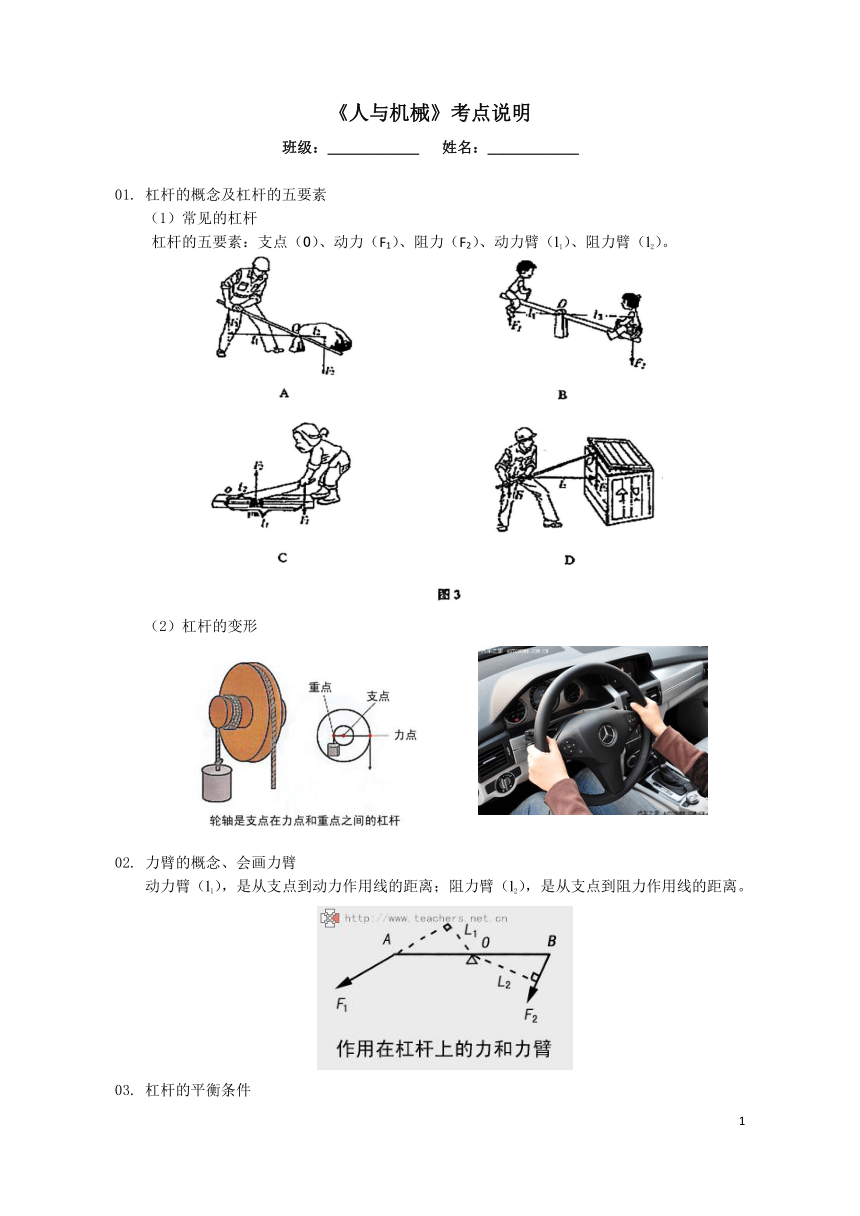
01. 杠杆的概念及杠杆的五要素
(1)常见的杠杆
杠杆的五要素:支点(O)、动力(F1)、阻力(F2)、动力臂(l1)、阻力臂(l2)。
(2)杠杆的变形
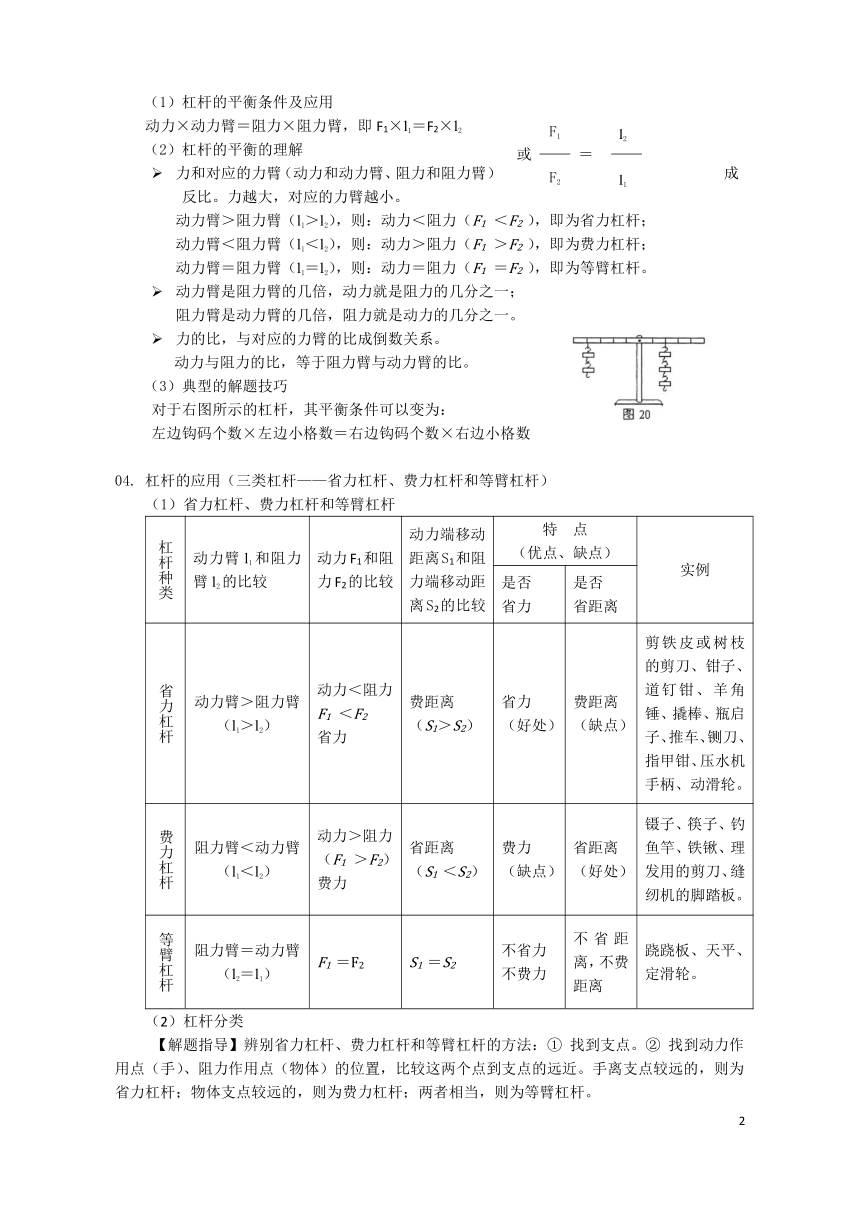
02. 力臂的概念、会画力臂
动力臂(l1),是从支点到动力作用线的距离;阻力臂(l2),是从支点到阻力作用线的距离。
03. 杠杆的平衡条件
(1)杠杆的平衡条件及应用
或 F1 = l2
F2 l1
动力×动力臂=阻力×阻力臂,即F1×l1=F2×l2
(2)杠杆的平衡的理解
力和对应的力臂(动力和动力臂、阻力和阻力臂)成反比。力越大,对应的力臂越小。
动力臂>阻力臂(l1>l2),则:动力<阻力(F1 <F2 ),即为省力杠杆;
动力臂<阻力臂(l1<l2),则:动力>阻力(F1 >F2 ),即为费力杠杆;
动力臂=阻力臂(l1=l2),则:动力=阻力(F1 =F2 ),即为等臂杠杆。
动力臂是阻力臂的几倍,动力就是阻力的几分之一;
阻力臂是动力臂的几倍,阻力就是动力的几分之一。
力的比,与对应的力臂的比成倒数关系。
动力与阻力的比,等于阻力臂与动力臂的比。
(3)典型的解题技巧
对于右图所示的杠杆,其平衡条件可以变为:
左边钩码个数×左边小格数=右边钩码个数×右边小格数
04. 杠杆的应用(三类杠杆——省力杠杆、费力杠杆和等臂杠杆)
(1)省力杠杆、费力杠杆和等臂杠杆
杠杆种类 动力臂l1和阻力臂l2的比较 动力F1和阻力F2的比较 动力端移动距离S1和阻力端移动距离S2的比较 特 点(优点、缺点) 实例
是否省力 是否省距离
省力杠杆 动力臂>阻力臂(l1>l2) 动力<阻力F1 <F2 省力 费距离(S1>S2) 省力(好处) 费距离(缺点) 剪铁皮或树枝的剪刀、钳子、道钉钳、羊角锤、撬棒、瓶启子、推车、铡刀、指甲钳、压水机手柄、动滑轮。
费力杠杆 阻力臂<动力臂(l1<l2) 动力>阻力(F1 >F2)费力 省距离(S1 <S2) 费力(缺点) 省距离(好处) 镊子、筷子、钓鱼竿、铁锹、理发用的剪刀、缝纫机的脚踏板。
等臂杠杆 阻力臂=动力臂(l2=l1) F1 =F2 S1 =S2 不省力不费力 不省距离,不费距离 跷跷板、天平、定滑轮。
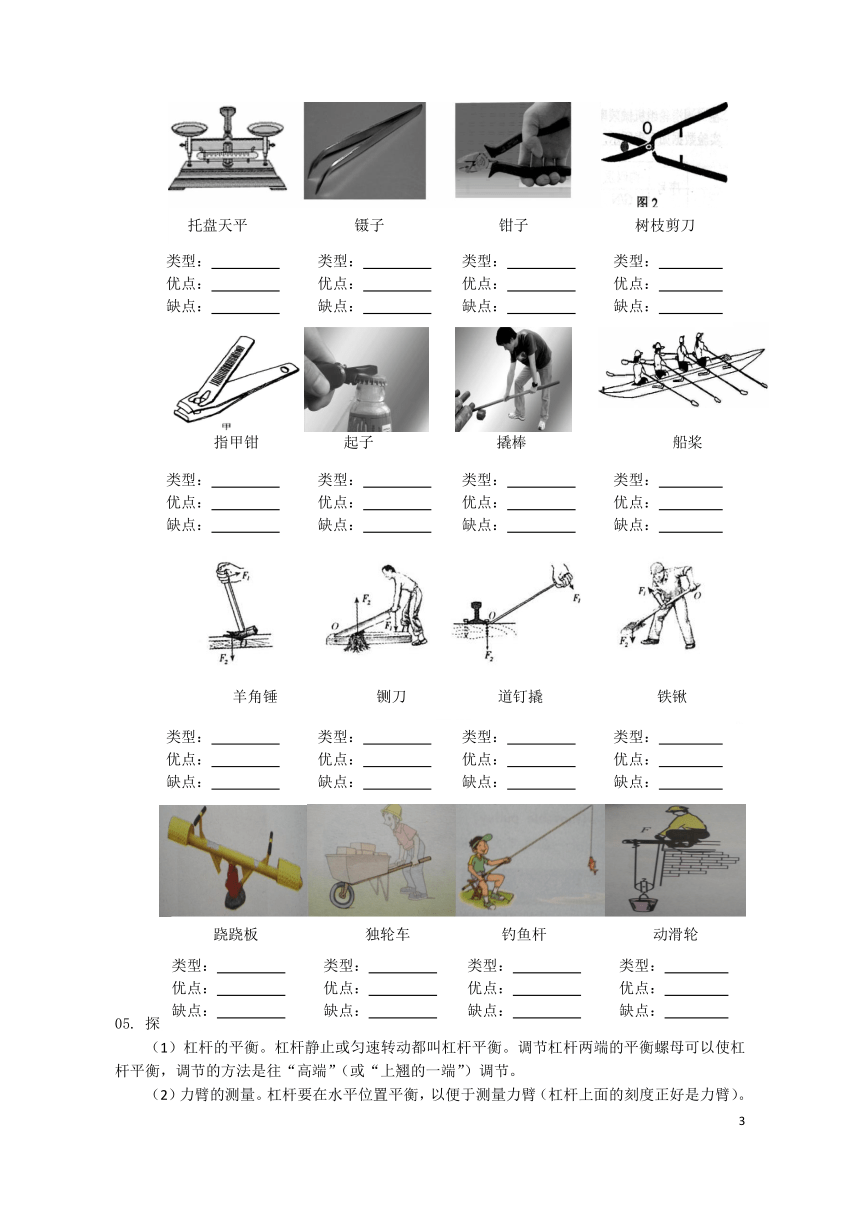
(2)杠杆分类
【解题指导】辨别省力杠杆、费力杠杆和等臂杠杆的方法:① 找到支点。② 找到动力作用点(手)、阻力作用点(物体)的位置,比较这两个点到支点的远近。手离支点较远的,则为省力杠杆;物体支点较远的,则为费力杠杆;两者相当,则为等臂杠杆。
05. 探究杠杆的平衡条件的实验
(1)杠杆的平衡。杠杆静止或匀速转动都叫杠杆平衡。调节杠杆两端的平衡螺母可以使杠杆平衡,调节的方法是往“高端”(或“上翘的一端”)调节。
(2)力臂的测量。杠杆要在水平位置平衡,以便于测量力臂(杠杆上面的刻度正好是力臂)。
(3)试验装置(如下图甲、乙、丁)和步骤。
(4)错误分析。上图中,图甲、乙、丁是正确的试验装置。图丙是错误的试验装置,错误之处是:F1的力臂测量错误。
(5)数据记录、分析和实验结论。
试验次数 动力F1(N) 动力臂l1(m) 动力×动力臂(N·m) 阻力F2(N) 阻力臂l2(m) 阻力×阻力臂(N·m)
1
2
数据处理方法:比较表格第4列和第7列的数据,可以得到实验结论,即F1×l1=F2×l2。
06. 定滑轮、动滑轮、滑轮组的特点和实质
(1)定滑轮、动滑轮、滑轮组的特点和实质
滑轮类型 物体重力G物 拉力大小F 拉力方向 重物提升高度h 绳自由端移动距离s 特点 实质
定滑轮 G物 F=G物 改变力的方向 h=s s=h 不省力;不省距离;改变力的方向 等臂杠杆
动滑轮 G物; G动=0 F=G物 不改变力的方向 h=s s=2h 省一半力;费距离;不改变力的方向。 动力臂是阻力臂2倍的省力杠杆
G物;G动 F=(G物+G动)
滑轮组 G物; G动=0 F=G物 改变或不改变力的方向 h=s s=nh 省力;费距离;改变或不改变力的方向。 物体重力被n段绳承担,拉力为总重力的。
G物;G动 F=(G物+G动)
(2)n的意义
n是指承担重物的绳的段数。若绳的末端是从定滑轮出来的,则n不包括这段绳;若绳的末端是从动滑轮出来的,则n包括这段绳。
(3)影响拉力F的因素
不计动滑轮的重力(G物)、绳的重力、绳与滑轮之间的摩擦力,则F=G物 ;
不计绳的重力、绳与滑轮之间的摩擦力,动滑轮重力为G物,则F=(G物+G动)
(4)s和h的关系
使用滑轮组提升重物,人是借助滑轮组来间接地提升重物的。这样,绳子的自由端在拉力F的作用下移动了距离s ,同时,重物(G物)提升高度h ,则:s=nh ,或h=s 。
(5)求G物和G动的变形公式
求G物的变形公式:G物=nF-G动 . (对于一个动滑轮,有n=2, 则G物=2F-G动)
求G动的变形公式:G动=nF-G 物 . (对于一个动滑轮,有n=2,则G动=2F-G物)
07. 滑轮组的绕线方法
【解题指导】① 若定滑轮和动滑轮的个数相等,n为偶数时,绳的末端从定滑轮出来(即“改变力的方向”的方式);n为奇数时,绳的末端从动滑轮出来(“用最省力”的方式)。② 若定滑轮和动滑轮的个数不相等,则绳的末端必须从“个数多”的定滑轮或动滑轮出来。
常考的滑轮组有以下几种类型(不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力):
组合一 组合二 组合三 组合四 组合五 组合六
定滑轮个数 1 1 2 2 1 2
动滑轮个数 1 1 2 2 2 1
n可能的值 n=2 n=3 n=4 n=5 n=4 n=3
F的大小 F=G物 F=G物 F=G物 F=G物 F=G物 F=G物
绳末端绕法 定滑轮 动滑轮 定滑轮 动滑轮 动滑轮 定滑轮
绕线图
08. 定滑轮、动滑轮的变形
下面五个图中,物体的重力都为G,物体与地面之间的摩擦力都为f,则拉力分别为多少?若重物移动的距离都为s,则拉力的作用端移动的距离L是多少?(不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力)
【解题指导】① 判断拉力F与物体重力G的关系,要清楚:哪一个力(物体的重力G或拉力F)被几段绳子分担。因为每段绳子上的力都相等,所以被分担的那个力,等于每段绳子上的力的n倍。
② 判断物体移动的距离s和拉力作用端移动的距离L的关系,要清楚:省力的费距离,即物体重力G和拉力F,谁小谁移动的距离就越大(n倍)。若物体重力G小,则物体移动的距离s是拉力作用端移动的距离L的n倍;若物体拉力F小,则拉力作用端移动的距离L是物体移动的距离s的n倍.
09. 滑轮组的变形
用滑轮组匀速水平拉动重力为G的物体,若物体受到的摩擦力为f,承担摩擦力的绳的段数为n,不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力,则绳自由端移动的拉力F=f .
用滑轮组水平拉动重物,绳自由端移动的距离为S,重物水平移动距离为l,则:S=n l .
l
【解题指导】物体在地面上做匀速运动受到四个力的作用(如有上图),它们分别是支持力(N)、重力(G)、拉力(F’)、摩擦力(f)。其中支持力N和重力G在竖直方向,与水平方向的运动无关,所以,应该是拉力F’被n段绳分担,而拉力F’=f,则绳自由端移动的拉力F=f .
另外,省力的费距离。绳自由端移动的距离S等于重物水平移动距离l的n倍,即:S=n l .
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
f
s
甲 乙 丙 丁
F
羊角锤 铡刀 道钉撬 铁锹
羊角锤 铡刀 道钉撬 铁锹
船桨
撬棒
指甲钳
起子
G
F’
跷跷板 独轮车 钓鱼杆 动滑轮
托盘天平 镊子 钳子 树枝剪刀
N
F1=G F2=2 G F1=f F2=f F3=2f
L=2 s L=s L=s L=2s L=s
f
1
班级:______ 姓名:______
01. 杠杆的概念及杠杆的五要素
(1)常见的杠杆
杠杆的五要素:支点(O)、动力(F1)、阻力(F2)、动力臂(l1)、阻力臂(l2)。
(2)杠杆的变形
02. 力臂的概念、会画力臂
动力臂(l1),是从支点到动力作用线的距离;阻力臂(l2),是从支点到阻力作用线的距离。
03. 杠杆的平衡条件
(1)杠杆的平衡条件及应用
或 F1 = l2
F2 l1
动力×动力臂=阻力×阻力臂,即F1×l1=F2×l2
(2)杠杆的平衡的理解
力和对应的力臂(动力和动力臂、阻力和阻力臂)成反比。力越大,对应的力臂越小。
动力臂>阻力臂(l1>l2),则:动力<阻力(F1 <F2 ),即为省力杠杆;
动力臂<阻力臂(l1<l2),则:动力>阻力(F1 >F2 ),即为费力杠杆;
动力臂=阻力臂(l1=l2),则:动力=阻力(F1 =F2 ),即为等臂杠杆。
动力臂是阻力臂的几倍,动力就是阻力的几分之一;
阻力臂是动力臂的几倍,阻力就是动力的几分之一。
力的比,与对应的力臂的比成倒数关系。
动力与阻力的比,等于阻力臂与动力臂的比。
(3)典型的解题技巧
对于右图所示的杠杆,其平衡条件可以变为:
左边钩码个数×左边小格数=右边钩码个数×右边小格数
04. 杠杆的应用(三类杠杆——省力杠杆、费力杠杆和等臂杠杆)
(1)省力杠杆、费力杠杆和等臂杠杆
杠杆种类 动力臂l1和阻力臂l2的比较 动力F1和阻力F2的比较 动力端移动距离S1和阻力端移动距离S2的比较 特 点(优点、缺点) 实例
是否省力 是否省距离
省力杠杆 动力臂>阻力臂(l1>l2) 动力<阻力F1 <F2 省力 费距离(S1>S2) 省力(好处) 费距离(缺点) 剪铁皮或树枝的剪刀、钳子、道钉钳、羊角锤、撬棒、瓶启子、推车、铡刀、指甲钳、压水机手柄、动滑轮。
费力杠杆 阻力臂<动力臂(l1<l2) 动力>阻力(F1 >F2)费力 省距离(S1 <S2) 费力(缺点) 省距离(好处) 镊子、筷子、钓鱼竿、铁锹、理发用的剪刀、缝纫机的脚踏板。
等臂杠杆 阻力臂=动力臂(l2=l1) F1 =F2 S1 =S2 不省力不费力 不省距离,不费距离 跷跷板、天平、定滑轮。
(2)杠杆分类
【解题指导】辨别省力杠杆、费力杠杆和等臂杠杆的方法:① 找到支点。② 找到动力作用点(手)、阻力作用点(物体)的位置,比较这两个点到支点的远近。手离支点较远的,则为省力杠杆;物体支点较远的,则为费力杠杆;两者相当,则为等臂杠杆。
05. 探究杠杆的平衡条件的实验
(1)杠杆的平衡。杠杆静止或匀速转动都叫杠杆平衡。调节杠杆两端的平衡螺母可以使杠杆平衡,调节的方法是往“高端”(或“上翘的一端”)调节。
(2)力臂的测量。杠杆要在水平位置平衡,以便于测量力臂(杠杆上面的刻度正好是力臂)。
(3)试验装置(如下图甲、乙、丁)和步骤。
(4)错误分析。上图中,图甲、乙、丁是正确的试验装置。图丙是错误的试验装置,错误之处是:F1的力臂测量错误。
(5)数据记录、分析和实验结论。
试验次数 动力F1(N) 动力臂l1(m) 动力×动力臂(N·m) 阻力F2(N) 阻力臂l2(m) 阻力×阻力臂(N·m)
1
2
数据处理方法:比较表格第4列和第7列的数据,可以得到实验结论,即F1×l1=F2×l2。
06. 定滑轮、动滑轮、滑轮组的特点和实质
(1)定滑轮、动滑轮、滑轮组的特点和实质
滑轮类型 物体重力G物 拉力大小F 拉力方向 重物提升高度h 绳自由端移动距离s 特点 实质
定滑轮 G物 F=G物 改变力的方向 h=s s=h 不省力;不省距离;改变力的方向 等臂杠杆
动滑轮 G物; G动=0 F=G物 不改变力的方向 h=s s=2h 省一半力;费距离;不改变力的方向。 动力臂是阻力臂2倍的省力杠杆
G物;G动 F=(G物+G动)
滑轮组 G物; G动=0 F=G物 改变或不改变力的方向 h=s s=nh 省力;费距离;改变或不改变力的方向。 物体重力被n段绳承担,拉力为总重力的。
G物;G动 F=(G物+G动)
(2)n的意义
n是指承担重物的绳的段数。若绳的末端是从定滑轮出来的,则n不包括这段绳;若绳的末端是从动滑轮出来的,则n包括这段绳。
(3)影响拉力F的因素
不计动滑轮的重力(G物)、绳的重力、绳与滑轮之间的摩擦力,则F=G物 ;
不计绳的重力、绳与滑轮之间的摩擦力,动滑轮重力为G物,则F=(G物+G动)
(4)s和h的关系
使用滑轮组提升重物,人是借助滑轮组来间接地提升重物的。这样,绳子的自由端在拉力F的作用下移动了距离s ,同时,重物(G物)提升高度h ,则:s=nh ,或h=s 。
(5)求G物和G动的变形公式
求G物的变形公式:G物=nF-G动 . (对于一个动滑轮,有n=2, 则G物=2F-G动)
求G动的变形公式:G动=nF-G 物 . (对于一个动滑轮,有n=2,则G动=2F-G物)
07. 滑轮组的绕线方法
【解题指导】① 若定滑轮和动滑轮的个数相等,n为偶数时,绳的末端从定滑轮出来(即“改变力的方向”的方式);n为奇数时,绳的末端从动滑轮出来(“用最省力”的方式)。② 若定滑轮和动滑轮的个数不相等,则绳的末端必须从“个数多”的定滑轮或动滑轮出来。
常考的滑轮组有以下几种类型(不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力):
组合一 组合二 组合三 组合四 组合五 组合六
定滑轮个数 1 1 2 2 1 2
动滑轮个数 1 1 2 2 2 1
n可能的值 n=2 n=3 n=4 n=5 n=4 n=3
F的大小 F=G物 F=G物 F=G物 F=G物 F=G物 F=G物
绳末端绕法 定滑轮 动滑轮 定滑轮 动滑轮 动滑轮 定滑轮
绕线图
08. 定滑轮、动滑轮的变形
下面五个图中,物体的重力都为G,物体与地面之间的摩擦力都为f,则拉力分别为多少?若重物移动的距离都为s,则拉力的作用端移动的距离L是多少?(不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力)
【解题指导】① 判断拉力F与物体重力G的关系,要清楚:哪一个力(物体的重力G或拉力F)被几段绳子分担。因为每段绳子上的力都相等,所以被分担的那个力,等于每段绳子上的力的n倍。
② 判断物体移动的距离s和拉力作用端移动的距离L的关系,要清楚:省力的费距离,即物体重力G和拉力F,谁小谁移动的距离就越大(n倍)。若物体重力G小,则物体移动的距离s是拉力作用端移动的距离L的n倍;若物体拉力F小,则拉力作用端移动的距离L是物体移动的距离s的n倍.
09. 滑轮组的变形
用滑轮组匀速水平拉动重力为G的物体,若物体受到的摩擦力为f,承担摩擦力的绳的段数为n,不计动滑轮的重力、绳的重力、绳与滑轮之间的摩擦力,则绳自由端移动的拉力F=f .
用滑轮组水平拉动重物,绳自由端移动的距离为S,重物水平移动距离为l,则:S=n l .
l
【解题指导】物体在地面上做匀速运动受到四个力的作用(如有上图),它们分别是支持力(N)、重力(G)、拉力(F’)、摩擦力(f)。其中支持力N和重力G在竖直方向,与水平方向的运动无关,所以,应该是拉力F’被n段绳分担,而拉力F’=f,则绳自由端移动的拉力F=f .
另外,省力的费距离。绳自由端移动的距离S等于重物水平移动距离l的n倍,即:S=n l .
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
类型: 类型: 类型: 类型:
优点: 优点: 优点: 优点:
缺点: 缺点: 缺点: 缺点:
f
s
甲 乙 丙 丁
F
羊角锤 铡刀 道钉撬 铁锹
羊角锤 铡刀 道钉撬 铁锹
船桨
撬棒
指甲钳
起子
G
F’
跷跷板 独轮车 钓鱼杆 动滑轮
托盘天平 镊子 钳子 树枝剪刀
N
F1=G F2=2 G F1=f F2=f F3=2f
L=2 s L=s L=s L=2s L=s
f
1
同课章节目录
- 第一章 常见的运动
- 一、长度和时间的测量
- 二、机械运动
- 三、比较运动的快慢
- 四、学生实验:测量速度
- 五、声音的产生和传播
- 六、乐音和噪声
- 七、超声波及其应用
- 课外探究 水杯琴
- 第二章 质量和密度
- 一、质量及测量
- 二、学生实验:测量质量
- 三、物质的密度及其应用
- 四、学生实验:测量密度
- 第三章 运动和力
- 一、力
- 二、力的测量
- 三、重力
- 四、二力平衡
- 五、滑动摩擦力
- 六、运动和力的关系
- 课外探究 防滑运动鞋
- 第四章 压强与浮力
- 一、压力 压强
- 二、探究液体压强
- 三、连通器
- 四、大气压强
- 五、液体的压强与流速的关系
- 六、浮力
- 七、物体的浮沉条件
- 第五章 简单机械
- 一、杠杆
- 二、学生实验:探究杠杆
- 三、滑轮
- 课外探究 变速自行车
- 第六章 功和能
- 一、功
- 二、功率
- 三、功的原理
- 四、机械能
- 第七章 热现象
- 一、温度、温度计
- 二、熔化和凝固
- 三、汽化和液化
- 四、升华和凝华
- 五、物质结构的微观模型
- 六、内能 能量转化
- 七、比热容
- 八、燃料 能源与环保
- 九、热机
- 第八章 光现象
- 一、光的传播
- 二、学生实验:探究光的反射规律
- 三、学生实验:探究平面镜成像
- 四、探究光的折射现象
- 五、透镜
- 六、学生实验:探究凸透镜成像
- 七、生活中的透镜
- 八、眼睛和眼镜
- 九、物体的颜色