第4节 简单机械(杠杆)专题(有难度)
文档属性
| 名称 | 第4节 简单机械(杠杆)专题(有难度) | 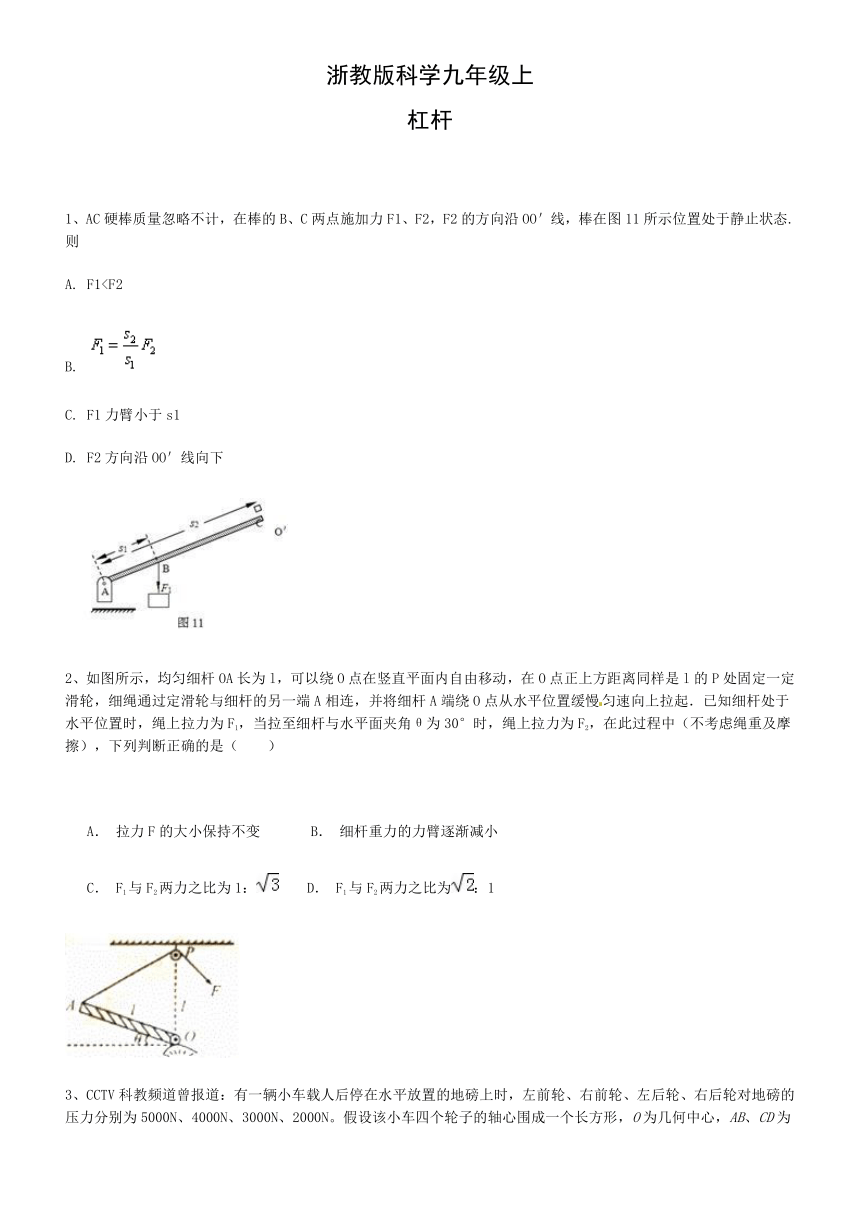 | |
| 格式 | zip | ||
| 文件大小 | 199.0KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2018-08-25 19:25:02 | ||
图片预览
文档简介
浙教版科学九年级上
杠杆
1、AC硬棒质量忽略不计,在棒的B、C两点施加力F1、F2,F2的方向沿OO'线,棒在图11所示位置处于静止状态. 则
A. F1B.
C. F1力臂小于s1
D. F2方向沿OO'线向下??
2、如图所示,均匀细杆OA长为l,可以绕O点在竖直平面内自由移动,在O点正上方距离同样是l的P处固定一定滑轮,细绳通过定滑轮与细杆的另一端A相连,并将细杆A端绕O点从水平位置缓慢匀速向上拉起.已知细杆处于水平位置时,绳上拉力为F1,当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,在此过程中(不考虑绳重及摩擦),下列判断正确的是( )
A. 拉力F的大小保持不变 B. 细杆重力的力臂逐渐减小
C. F1与F2两力之比为1: D. F1与F2两力之比为:1
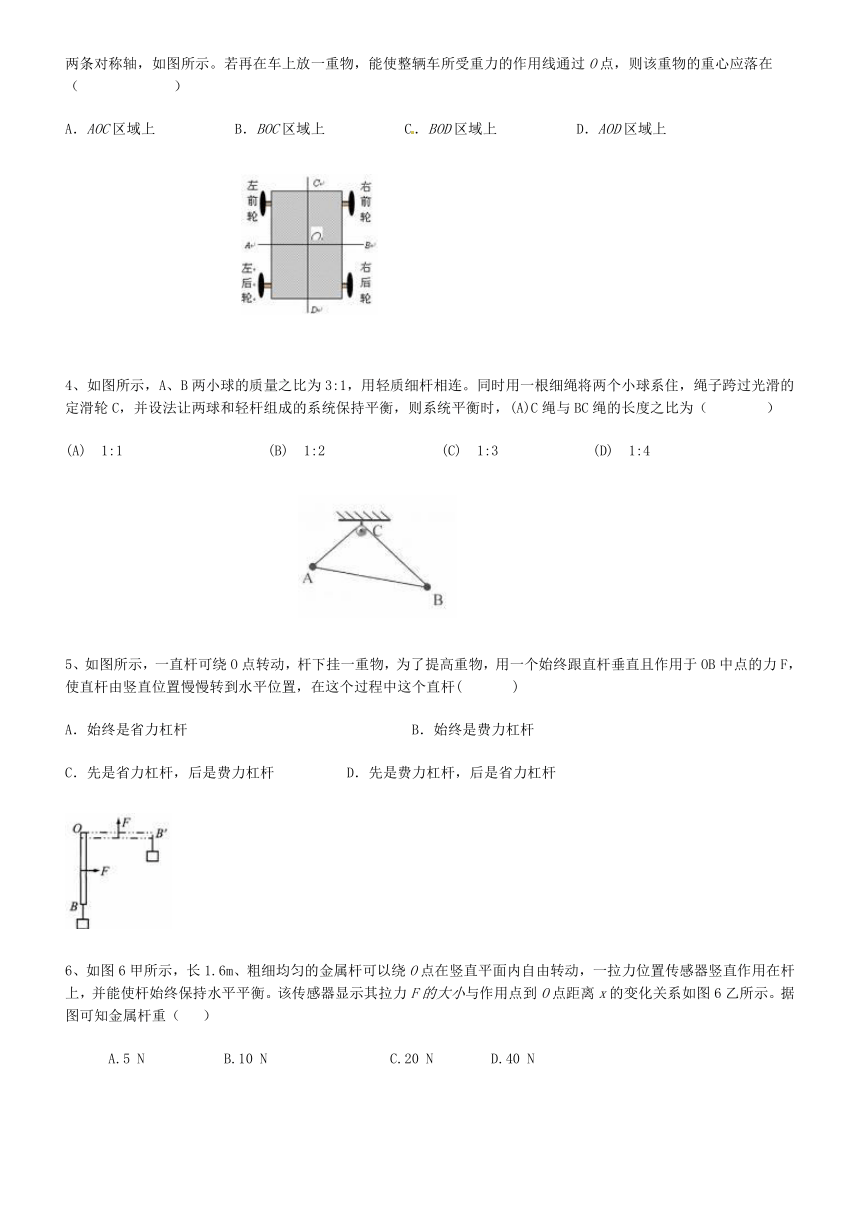
3、CCTV科教频道曾报道:有一辆小车载人后停在水平放置的地磅上时,左前轮、右前轮、左后轮、右后轮对地磅的压力分别为5000N、4000N、3000N、2000N。假设该小车四个轮子的轴心围成一个长方形,O为几何中心,AB、CD为两条对称轴,如图所示。若再在车上放一重物,能使整辆车所受重力的作用线通过O点,则该重物的重心应落在(??? ???)
A.AOC区域上???? ?B.BOC区域上????? C.BOD区域上????? D.AOD区域上
4、如图所示,A、B两小球的质量之比为3:1,用轻质细杆相连。同时用一根细绳将两个小球系住,绳子跨过光滑的定滑轮C,并设法让两球和轻杆组成的系统保持平衡,则系统平衡时,(A)C绳与BC绳的长度之比为(????)?
(A)?1:1??????????(B)?1:2????????(C)?1:3????? (D)?1:4??
5、如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直且作用于OB中点的力F,使直杆由竖直位置慢慢转到水平位置,在这个过程中这个直杆(??? )
A.始终是省力杠杆??????????????? B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆 D.先是费力杠杆,后是省力杠杆
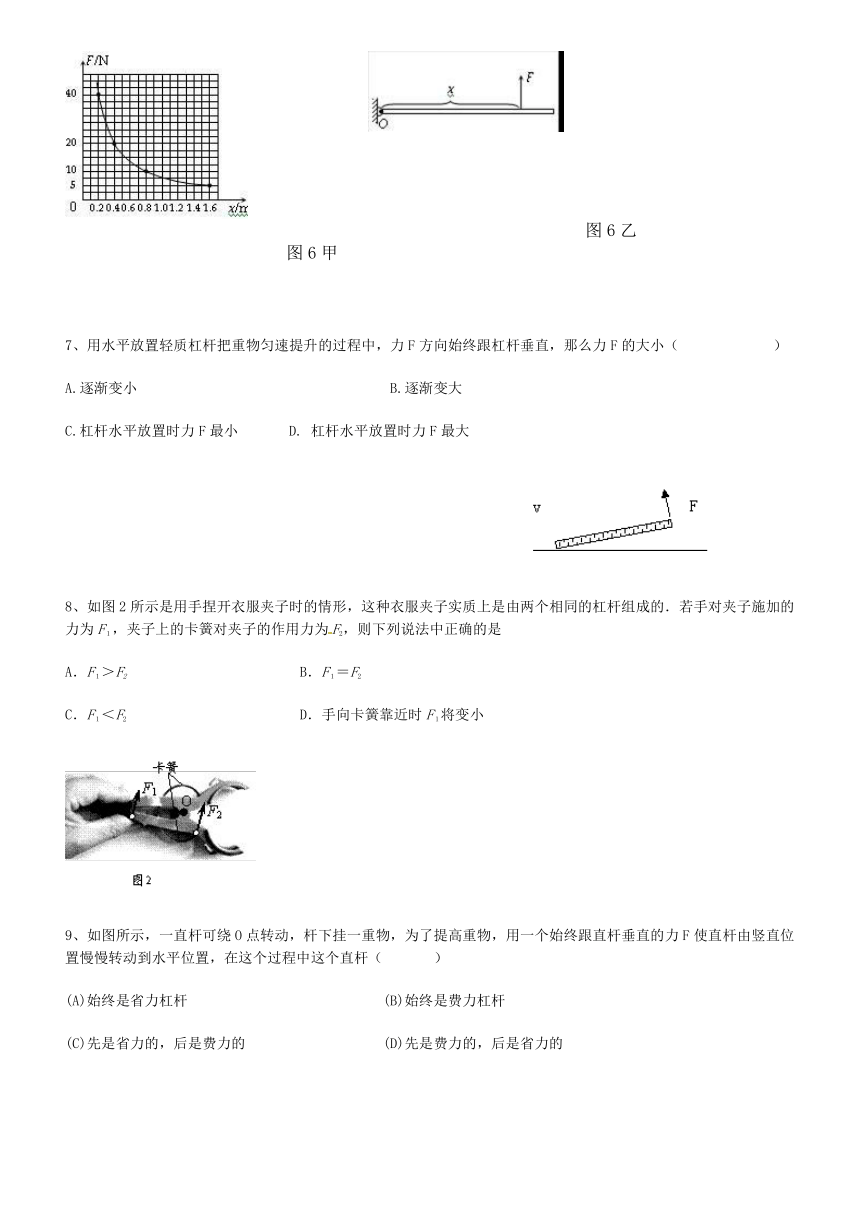
6、如图6甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力位置传感器竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F的大小与作用点到O点距离x的变化关系如图6乙所示。据图可知金属杆重(? )
???A.5 N????? B.10 N???????? C.20 N????D.40 N
图6乙
?
图6甲
?
?
7、用水平放置轻质杠杆把重物匀速提升的过程中,力F方向始终跟杠杆垂直,那么力F的大小(?????? )
A.逐渐变小????????????????? B.逐渐变大
C.杠杆水平放置时力F最小??? D. 杠杆水平放置时力F最大
?
8、如图2所示是用手捏开衣服夹子时的情形,这种衣服夹子实质上是由两个相同的杠杆组成的.若手对夹子施加的力为F1,夹子上的卡簧对夹子的作用力为F2,则下列说法中正确的是
A.F1>F2 B.F1=F2
C.F1<F2 D.手向卡簧靠近时F1将变小
9、如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直的力F使直杆由竖直位置慢慢转动到水平位置,在这个过程中这个直杆(??? )
(A)始终是省力杠杆????????????? (B)始终是费力杠杆
(C)先是省力的,后是费力的????? (D)先是费力的,后是省力的
????????????????????????????????????????????????????????????
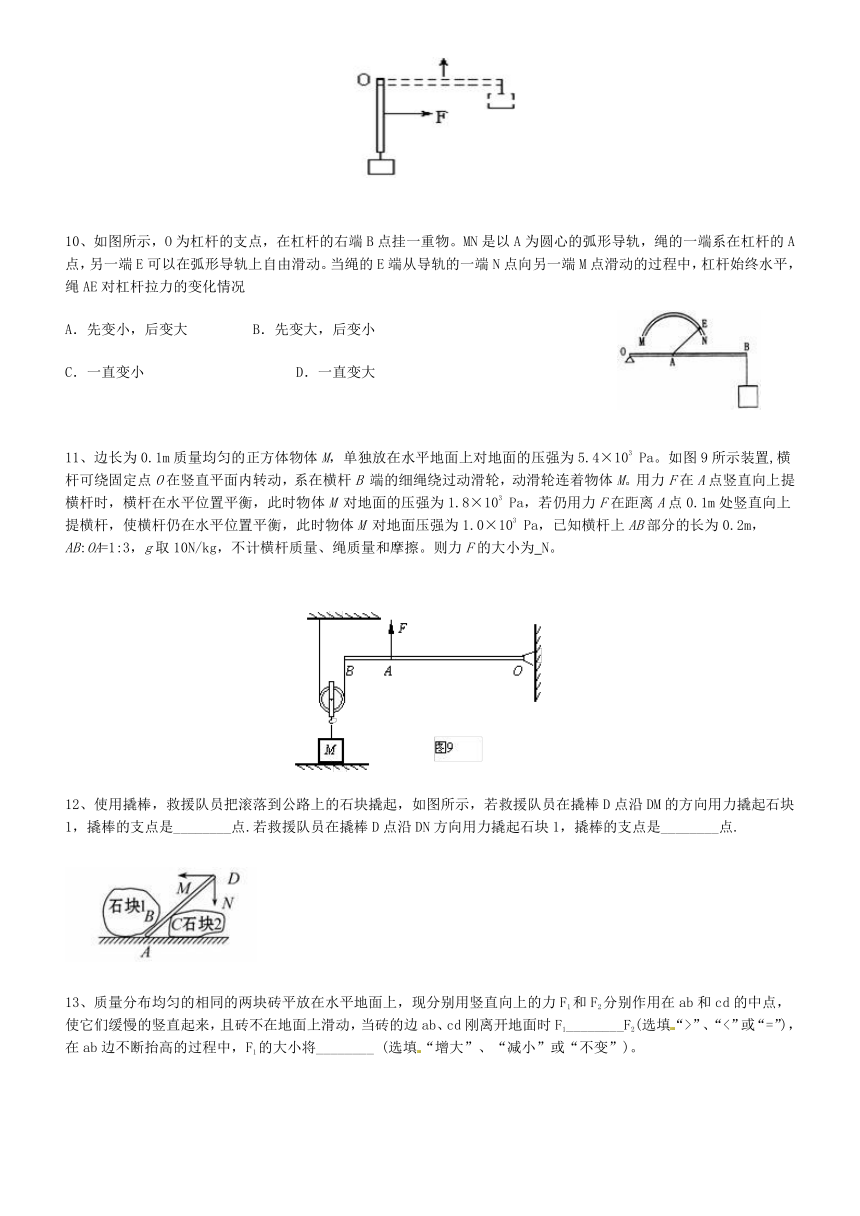
10、如图所示,O为杠杆的支点,在杠杆的右端B点挂一重物。MN是以A为圆心的弧形导轨,绳的一端系在杠杆的A点,另一端E可以在弧形导轨上自由滑动。当绳的E端从导轨的一端N点向另一端M点滑动的过程中,杠杆始终水平,绳AE对杠杆拉力的变化情况
A.先变小,后变大???? B.先变大,后变小
C.一直变小?????????? D.一直变大
11、边长为0.1m质量均匀的正方体物体M,单独放在水平地面上对地面的压强为5.4×103 Pa。如图9所示装置,横杆可绕固定点O在竖直平面内转动,系在横杆B 端的细绳绕过动滑轮,动滑轮连着物体M。用力F在A点竖直向上提横杆时,横杆在水平位置平衡,此时物体M 对地面的压强为1.8×103 Pa,若仍用力F在距离A点0.1m处竖直向上提横杆,使横杆仍在水平位置平衡,此时物体M 对地面压强为1.0×103 Pa,已知横杆上AB部分的长为0.2m,AB:OA=1:3,g取10N/kg,不计横杆质量、绳质量和摩擦。则力F的大小为 N。
12、使用撬棒,救援队员把滚落到公路上的石块撬起,如图所示,若救援队员在撬棒D点沿DM的方向用力撬起石块1,撬棒的支点是________点.若救援队员在撬棒D点沿DN方向用力撬起石块1,撬棒的支点是________点.
13、质量分布均匀的相同的两块砖平放在水平地面上,现分别用竖直向上的力F1和F2分别作用在ab和cd的中点,使它们缓慢的竖直起来,且砖不在地面上滑动,当砖的边ab、cd刚离开地面时F1________F2(选填“>”、“<”或“=”),在ab边不断抬高的过程中,F1的大小将________ (选填“增大”、“减小”或“不变”)。
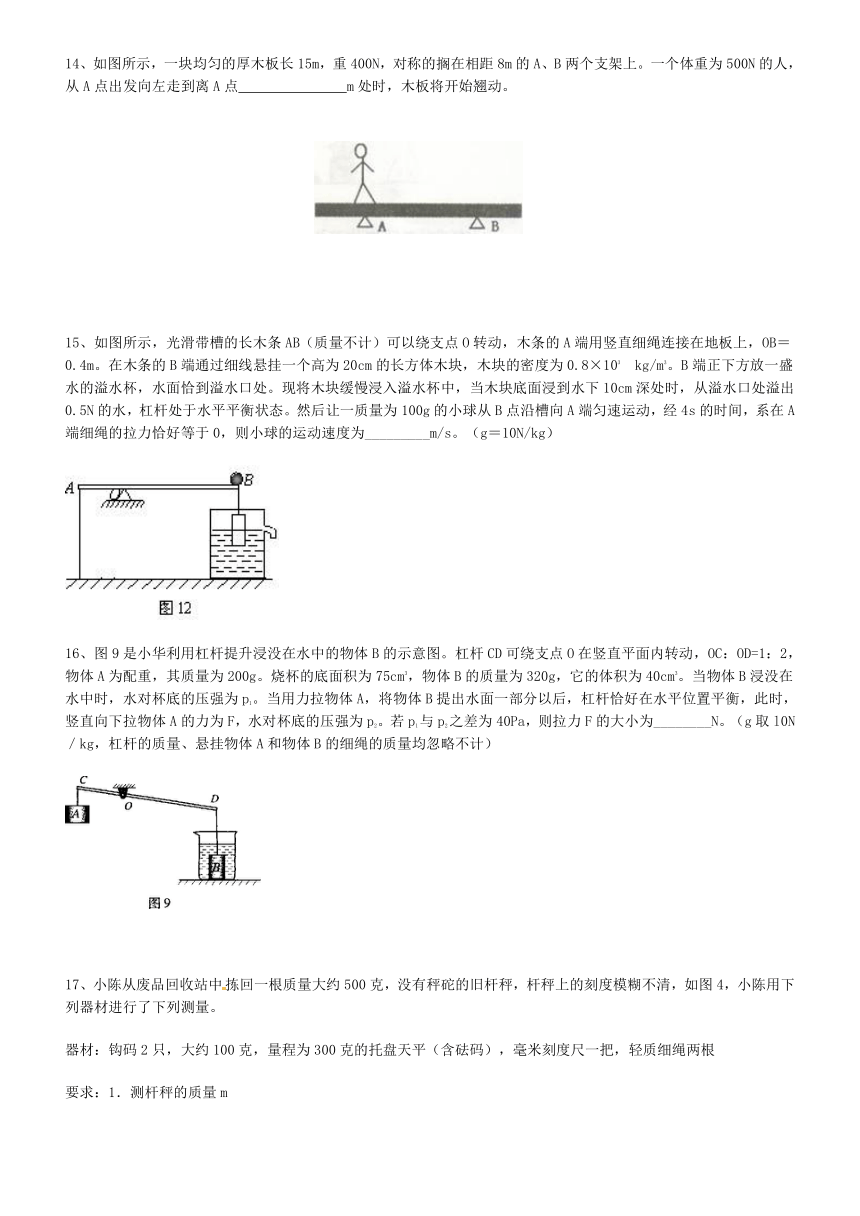
14、如图所示,一块均匀的厚木板长15m,重400N,对称的搁在相距8m的A、B两个支架上。一个体重为500N的人,从A点出发向左走到离A点 ???????m处时,木板将开始翘动。
15、如图所示,光滑带槽的长木条AB(质量不计)可以绕支点O转动,木条的A端用竖直细绳连接在地板上,OB=0.4m。在木条的B端通过细线悬挂一个高为20cm的长方体木块,木块的密度为0.8×103?kg/m3。B端正下方放一盛水的溢水杯,水面恰到溢水口处。现将木块缓慢浸入溢水杯中,当木块底面浸到水下10cm深处时,从溢水口处溢出0.5N的水,杠杆处于水平平衡状态。然后让一质量为100g的小球从B点沿槽向A端匀速运动,经4s的时间,系在A端细绳的拉力恰好等于0,则小球的运动速度为_________m/s。(g=10N/kg)
16、图9是小华利用杠杆提升浸没在水中的物体B的示意图。杠杆CD可绕支点O在竖直平面内转动,OC:OD=1:2,物体A为配重,其质量为200g。烧杯的底面积为75cm3,物体B的质量为320g,它的体积为40cm3。当物体B浸没在水中时,水对杯底的压强为p1。当用力拉物体A,将物体B提出水面一部分以后,杠杆恰好在水平位置平衡,此时,竖直向下拉物体A的力为F,水对杯底的压强为p2。若p1与p2之差为40Pa,则拉力F的大小为________N。(g取l0N/kg,杠杆的质量、悬挂物体A和物体B的细绳的质量均忽略不计)
17、小陈从废品回收站中拣回一根质量大约500克,没有秤砣的旧杆秤,杆秤上的刻度模糊不清,如图4,小陈用下列器材进行了下列测量。
器材:钩码2只,大约100克,量程为300克的托盘天平(含砝码),毫米刻度尺一把,轻质细绳两根
要求:1.测杆秤的质量m
(1)请你写出小陈测量杆秤的质量的主要实验步骤(表述中用到的字母可以任意选取)。(2)要直接测量的物理量有???????? 。
2.测定星的位置小陈找到了杆秤的秤砣,并测出了砣的质量为m1,请你帮他找出定星的位置,方法是:
??????? ??? 图4
18、图29所示的实验装置可以探究杠杆受两个阻力(F2、F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验
次数
动力
F1
动力臂
l1
阻力
F2
阻力臂
l2
阻力
F3
阻力臂
l3
1
1
5
1
1
2
2
2
2
6
1
2
2
5
3
3
7
1
5
4
4
(1)分析表中的数据,可得杠杆的平衡条件是????????? 。(填写关系式)
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到??????? 的距离l;
?③ 在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件
???? Mg x1 = ???????+ G0 l0
以及 ???????= m2gl + G0 l0
两式相减得 M=?????????? (要求用l、x1、x2、m1、m2表示)。
19、对于杠杆的原理,我国古代也很注意研究,在古书《墨经》中就对杆秤作了科学的说明。某物理小组探究如图21所示的一杆秤,通过观察和测量知道:
杆秤上标有刻度,提纽在B点,秤钩在A点,O点为刻度的起点(为零刻度点,在B点左侧)。用刻度尺量出OA=l1,OB=l2。
⑴秤钩不挂重物时,秤砣挂在O点时杆秤平衡,则重心C应在B点的__________侧(选填“左”、“右”或“不确定”)。 设该杆秤秤砣的质量为m,则杆秤自身重力(不含秤砣)和它的力臂的乘积是__________。
⑵物理小组利用空瓶(空瓶质量比秤砣质量小一些)、细线和原有秤砣测出原秤砣的质量。方法是:用细线系在空瓶上并置于__________点,慢慢往瓶中加沙子,如果杆秤恰能平衡,相当于新做了一个秤砣,再把它挂在秤钩上,移动原秤砣位置至杆秤平衡,秤杆上的读数即为原秤砣质量。
⑶物理小组通过查资料得到“如果杠杆受两个阻力,杠杆的平衡条件是:F动l动=F阻l阻+F′阻l′阻,如图22所示”。则上一问中实际上只要有刻度尺利用科学推理也可测得秤砣质量,方法是:设想有两个完全一样的原秤砣甲、乙,将甲置于A点,乙置于B点右侧某点,杆秤恰好平衡。由杠杆的平衡条件可知,量出长度l1、l2后,只须从B点起向右量出长度__________,该位置杆秤上的读数即为秤砣的质量m。
20、如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向??? ▲?? (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持??? ▲?? 并静止,达到平衡状态。这样做的好处是:便于在杠杆上直接测量??? ▲?? 。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:??? ▲?? 。他这样得出的结论是否合理???? ▲?? 为什么????????? ▲????????? 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是:????????????????? ▲???????????????????? 。
21、为了探究杠杆平衡条件,老师让同学们准备的器材是一元的硬币若干枚,一只圆柱形水杯,胶带、质地均匀的塑料尺;老师告诉同学们,用胶带将圆柱形水杯固定在水平桌面上做支点,用你的塑料尺做杠杆,硬币做钩码。
(1)在图中画出左右的力臂
(2)实验中如果尺的中心发生了移动,对实验结果有影响吗?
答:???????? (只答“有”还是“没有”)
(3)如果左右两端各取下一枚硬币则杠杆将向???????? 倾斜。
(4)在下面画出记录实验数据的表格:
答案
1、C
2、?(1)杆即将离开水平位置,如右上图,△AOB和△ABE都为等腰直角三角形,AE=BE,AC=L;
∵(BE)2+(AE)2=(AB)2,
∴AE=L,
∵杠杆平衡,
∴F1×AE=G×AC,
F1===G,
(2)把吊桥拉起到与水平面的夹角为30°时,如右下图,△ABO为等边三角形,
AB=L,BE′=L,
∵(BE′)2+(AE′)2=(AB)2
∴AE′=L,
在△ACC′中,∠CAC′=30°,CC′=AC=L,
∵(AC′)2+(CC′)2=(AC)2,
∴AC′=L,
∵AC′<AC,
∴细杆重力的力臂逐渐减小,故B正确;
∵杠杆平衡,
∴F2×AE′=G×AC′,
F2===G,
∴F1>F2,故A错误;
则F1:F2=G:G=:1,故C错误,D正确.
故选BD.
3、C
4、C
5、C
6、B
7、?AD
8、C
9、C
10、A
11、32
12、A C
13、= 不变
14、?? 3.2?? ?、
15、0.13
16、4.2
17、1.测杆秤的质量m
(1) ①用细绳拴住两个钩玛(作为秤砣用)并用天平测出它的质量…………(1分)
②用细绳拴住杆秤,竖直悬挂,并调整拴杆秤的结点位置,直到杆秤水平平衡,记下结点位置A(此点为秤的重心位置)
③提起提扭,移动秤砣的位置,使杆秤水平平衡,记下秤砣悬挂杆秤的位置B……1分
④用刻度尺量出OA、OB的长度,(如图)………………………………(1分)
⑤据…………………………(1分)
(2)OA、OB、………………………………………(3分)
2.测定星的位置
把秤砣悬挂于杆秤上,提起提扭,调整砣的位置,直到杆秤水平平衡,记下砣悬挂秤的位置C,C即为定星的位置…………………………(2分)
18、(1) F1l1= F2l2+ F3l3…
(2) ③ 提纽
④? m1gl
Mg x2
(m2- m1)l/(x2- x1)
19、⑴右?? ???⑵O?????????? ?⑶?????????? ?
甲
?
20、?⑴左;?? 水平;? 力臂
⑵F1L1=F2L2;? 不合理;? 结论具有偶然性(结论没有普遍性)????
⑶杠杆自重的影响
21、(1)要求:画出力及力的作用点,力臂作图正确??????????????
(2)有
(3)右
(4)??????????????? ?????????????????????????????????????
实验次数
动力(左侧硬币数)
动力臂/cm
阻力(右侧硬币数)
阻力臂/cm
1
2
3
杠杆
1、AC硬棒质量忽略不计,在棒的B、C两点施加力F1、F2,F2的方向沿OO'线,棒在图11所示位置处于静止状态. 则
A. F1
C. F1力臂小于s1
D. F2方向沿OO'线向下??
2、如图所示,均匀细杆OA长为l,可以绕O点在竖直平面内自由移动,在O点正上方距离同样是l的P处固定一定滑轮,细绳通过定滑轮与细杆的另一端A相连,并将细杆A端绕O点从水平位置缓慢匀速向上拉起.已知细杆处于水平位置时,绳上拉力为F1,当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,在此过程中(不考虑绳重及摩擦),下列判断正确的是( )
A. 拉力F的大小保持不变 B. 细杆重力的力臂逐渐减小
C. F1与F2两力之比为1: D. F1与F2两力之比为:1
3、CCTV科教频道曾报道:有一辆小车载人后停在水平放置的地磅上时,左前轮、右前轮、左后轮、右后轮对地磅的压力分别为5000N、4000N、3000N、2000N。假设该小车四个轮子的轴心围成一个长方形,O为几何中心,AB、CD为两条对称轴,如图所示。若再在车上放一重物,能使整辆车所受重力的作用线通过O点,则该重物的重心应落在(??? ???)
A.AOC区域上???? ?B.BOC区域上????? C.BOD区域上????? D.AOD区域上
4、如图所示,A、B两小球的质量之比为3:1,用轻质细杆相连。同时用一根细绳将两个小球系住,绳子跨过光滑的定滑轮C,并设法让两球和轻杆组成的系统保持平衡,则系统平衡时,(A)C绳与BC绳的长度之比为(????)?
(A)?1:1??????????(B)?1:2????????(C)?1:3????? (D)?1:4??
5、如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直且作用于OB中点的力F,使直杆由竖直位置慢慢转到水平位置,在这个过程中这个直杆(??? )
A.始终是省力杠杆??????????????? B.始终是费力杠杆
C.先是省力杠杆,后是费力杠杆 D.先是费力杠杆,后是省力杠杆
6、如图6甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力位置传感器竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F的大小与作用点到O点距离x的变化关系如图6乙所示。据图可知金属杆重(? )
???A.5 N????? B.10 N???????? C.20 N????D.40 N
图6乙
?
图6甲
?
?
7、用水平放置轻质杠杆把重物匀速提升的过程中,力F方向始终跟杠杆垂直,那么力F的大小(?????? )
A.逐渐变小????????????????? B.逐渐变大
C.杠杆水平放置时力F最小??? D. 杠杆水平放置时力F最大
?
8、如图2所示是用手捏开衣服夹子时的情形,这种衣服夹子实质上是由两个相同的杠杆组成的.若手对夹子施加的力为F1,夹子上的卡簧对夹子的作用力为F2,则下列说法中正确的是
A.F1>F2 B.F1=F2
C.F1<F2 D.手向卡簧靠近时F1将变小
9、如图所示,一直杆可绕O点转动,杆下挂一重物,为了提高重物,用一个始终跟直杆垂直的力F使直杆由竖直位置慢慢转动到水平位置,在这个过程中这个直杆(??? )
(A)始终是省力杠杆????????????? (B)始终是费力杠杆
(C)先是省力的,后是费力的????? (D)先是费力的,后是省力的
????????????????????????????????????????????????????????????
10、如图所示,O为杠杆的支点,在杠杆的右端B点挂一重物。MN是以A为圆心的弧形导轨,绳的一端系在杠杆的A点,另一端E可以在弧形导轨上自由滑动。当绳的E端从导轨的一端N点向另一端M点滑动的过程中,杠杆始终水平,绳AE对杠杆拉力的变化情况
A.先变小,后变大???? B.先变大,后变小
C.一直变小?????????? D.一直变大
11、边长为0.1m质量均匀的正方体物体M,单独放在水平地面上对地面的压强为5.4×103 Pa。如图9所示装置,横杆可绕固定点O在竖直平面内转动,系在横杆B 端的细绳绕过动滑轮,动滑轮连着物体M。用力F在A点竖直向上提横杆时,横杆在水平位置平衡,此时物体M 对地面的压强为1.8×103 Pa,若仍用力F在距离A点0.1m处竖直向上提横杆,使横杆仍在水平位置平衡,此时物体M 对地面压强为1.0×103 Pa,已知横杆上AB部分的长为0.2m,AB:OA=1:3,g取10N/kg,不计横杆质量、绳质量和摩擦。则力F的大小为 N。
12、使用撬棒,救援队员把滚落到公路上的石块撬起,如图所示,若救援队员在撬棒D点沿DM的方向用力撬起石块1,撬棒的支点是________点.若救援队员在撬棒D点沿DN方向用力撬起石块1,撬棒的支点是________点.
13、质量分布均匀的相同的两块砖平放在水平地面上,现分别用竖直向上的力F1和F2分别作用在ab和cd的中点,使它们缓慢的竖直起来,且砖不在地面上滑动,当砖的边ab、cd刚离开地面时F1________F2(选填“>”、“<”或“=”),在ab边不断抬高的过程中,F1的大小将________ (选填“增大”、“减小”或“不变”)。
14、如图所示,一块均匀的厚木板长15m,重400N,对称的搁在相距8m的A、B两个支架上。一个体重为500N的人,从A点出发向左走到离A点 ???????m处时,木板将开始翘动。
15、如图所示,光滑带槽的长木条AB(质量不计)可以绕支点O转动,木条的A端用竖直细绳连接在地板上,OB=0.4m。在木条的B端通过细线悬挂一个高为20cm的长方体木块,木块的密度为0.8×103?kg/m3。B端正下方放一盛水的溢水杯,水面恰到溢水口处。现将木块缓慢浸入溢水杯中,当木块底面浸到水下10cm深处时,从溢水口处溢出0.5N的水,杠杆处于水平平衡状态。然后让一质量为100g的小球从B点沿槽向A端匀速运动,经4s的时间,系在A端细绳的拉力恰好等于0,则小球的运动速度为_________m/s。(g=10N/kg)
16、图9是小华利用杠杆提升浸没在水中的物体B的示意图。杠杆CD可绕支点O在竖直平面内转动,OC:OD=1:2,物体A为配重,其质量为200g。烧杯的底面积为75cm3,物体B的质量为320g,它的体积为40cm3。当物体B浸没在水中时,水对杯底的压强为p1。当用力拉物体A,将物体B提出水面一部分以后,杠杆恰好在水平位置平衡,此时,竖直向下拉物体A的力为F,水对杯底的压强为p2。若p1与p2之差为40Pa,则拉力F的大小为________N。(g取l0N/kg,杠杆的质量、悬挂物体A和物体B的细绳的质量均忽略不计)
17、小陈从废品回收站中拣回一根质量大约500克,没有秤砣的旧杆秤,杆秤上的刻度模糊不清,如图4,小陈用下列器材进行了下列测量。
器材:钩码2只,大约100克,量程为300克的托盘天平(含砝码),毫米刻度尺一把,轻质细绳两根
要求:1.测杆秤的质量m
(1)请你写出小陈测量杆秤的质量的主要实验步骤(表述中用到的字母可以任意选取)。(2)要直接测量的物理量有???????? 。
2.测定星的位置小陈找到了杆秤的秤砣,并测出了砣的质量为m1,请你帮他找出定星的位置,方法是:
??????? ??? 图4
18、图29所示的实验装置可以探究杠杆受两个阻力(F2、F3)时的平衡条件。在已调节好的杠杆两端挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
实验
次数
动力
F1
动力臂
l1
阻力
F2
阻力臂
l2
阻力
F3
阻力臂
l3
1
1
5
1
1
2
2
2
2
6
1
2
2
5
3
3
7
1
5
4
4
(1)分析表中的数据,可得杠杆的平衡条件是????????? 。(填写关系式)
(2)在农村还广泛使用的杆秤就利用了上述原理。图21是一根杆秤的示意图。小云设计了如下测量秤砣质量M的实验方案,请你将②、④两步补充完整。
① 用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m-x关系图象,如图22所示。
② 用刻度尺测量挂钩到??????? 的距离l;
?③ 在m-x关系图象中任意读取两组数据x1、m1和x2、m2;
④ 设杆秤自重G0,重心到提扭的距离l0,据杠杆平衡条件
???? Mg x1 = ???????+ G0 l0
以及 ???????= m2gl + G0 l0
两式相减得 M=?????????? (要求用l、x1、x2、m1、m2表示)。
19、对于杠杆的原理,我国古代也很注意研究,在古书《墨经》中就对杆秤作了科学的说明。某物理小组探究如图21所示的一杆秤,通过观察和测量知道:
杆秤上标有刻度,提纽在B点,秤钩在A点,O点为刻度的起点(为零刻度点,在B点左侧)。用刻度尺量出OA=l1,OB=l2。
⑴秤钩不挂重物时,秤砣挂在O点时杆秤平衡,则重心C应在B点的__________侧(选填“左”、“右”或“不确定”)。 设该杆秤秤砣的质量为m,则杆秤自身重力(不含秤砣)和它的力臂的乘积是__________。
⑵物理小组利用空瓶(空瓶质量比秤砣质量小一些)、细线和原有秤砣测出原秤砣的质量。方法是:用细线系在空瓶上并置于__________点,慢慢往瓶中加沙子,如果杆秤恰能平衡,相当于新做了一个秤砣,再把它挂在秤钩上,移动原秤砣位置至杆秤平衡,秤杆上的读数即为原秤砣质量。
⑶物理小组通过查资料得到“如果杠杆受两个阻力,杠杆的平衡条件是:F动l动=F阻l阻+F′阻l′阻,如图22所示”。则上一问中实际上只要有刻度尺利用科学推理也可测得秤砣质量,方法是:设想有两个完全一样的原秤砣甲、乙,将甲置于A点,乙置于B点右侧某点,杆秤恰好平衡。由杠杆的平衡条件可知,量出长度l1、l2后,只须从B点起向右量出长度__________,该位置杆秤上的读数即为秤砣的质量m。
20、如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向??? ▲?? (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持??? ▲?? 并静止,达到平衡状态。这样做的好处是:便于在杠杆上直接测量??? ▲?? 。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。于是小明便得出了杠杆的平衡条件为:??? ▲?? 。他这样得出的结论是否合理???? ▲?? 为什么????????? ▲????????? 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是:????????????????? ▲???????????????????? 。
21、为了探究杠杆平衡条件,老师让同学们准备的器材是一元的硬币若干枚,一只圆柱形水杯,胶带、质地均匀的塑料尺;老师告诉同学们,用胶带将圆柱形水杯固定在水平桌面上做支点,用你的塑料尺做杠杆,硬币做钩码。
(1)在图中画出左右的力臂
(2)实验中如果尺的中心发生了移动,对实验结果有影响吗?
答:???????? (只答“有”还是“没有”)
(3)如果左右两端各取下一枚硬币则杠杆将向???????? 倾斜。
(4)在下面画出记录实验数据的表格:
答案
1、C
2、?(1)杆即将离开水平位置,如右上图,△AOB和△ABE都为等腰直角三角形,AE=BE,AC=L;
∵(BE)2+(AE)2=(AB)2,
∴AE=L,
∵杠杆平衡,
∴F1×AE=G×AC,
F1===G,
(2)把吊桥拉起到与水平面的夹角为30°时,如右下图,△ABO为等边三角形,
AB=L,BE′=L,
∵(BE′)2+(AE′)2=(AB)2
∴AE′=L,
在△ACC′中,∠CAC′=30°,CC′=AC=L,
∵(AC′)2+(CC′)2=(AC)2,
∴AC′=L,
∵AC′<AC,
∴细杆重力的力臂逐渐减小,故B正确;
∵杠杆平衡,
∴F2×AE′=G×AC′,
F2===G,
∴F1>F2,故A错误;
则F1:F2=G:G=:1,故C错误,D正确.
故选BD.
3、C
4、C
5、C
6、B
7、?AD
8、C
9、C
10、A
11、32
12、A C
13、= 不变
14、?? 3.2?? ?、
15、0.13
16、4.2
17、1.测杆秤的质量m
(1) ①用细绳拴住两个钩玛(作为秤砣用)并用天平测出它的质量…………(1分)
②用细绳拴住杆秤,竖直悬挂,并调整拴杆秤的结点位置,直到杆秤水平平衡,记下结点位置A(此点为秤的重心位置)
③提起提扭,移动秤砣的位置,使杆秤水平平衡,记下秤砣悬挂杆秤的位置B……1分
④用刻度尺量出OA、OB的长度,(如图)………………………………(1分)
⑤据…………………………(1分)
(2)OA、OB、………………………………………(3分)
2.测定星的位置
把秤砣悬挂于杆秤上,提起提扭,调整砣的位置,直到杆秤水平平衡,记下砣悬挂秤的位置C,C即为定星的位置…………………………(2分)
18、(1) F1l1= F2l2+ F3l3…
(2) ③ 提纽
④? m1gl
Mg x2
(m2- m1)l/(x2- x1)
19、⑴右?? ???⑵O?????????? ?⑶?????????? ?
甲
?
20、?⑴左;?? 水平;? 力臂
⑵F1L1=F2L2;? 不合理;? 结论具有偶然性(结论没有普遍性)????
⑶杠杆自重的影响
21、(1)要求:画出力及力的作用点,力臂作图正确??????????????
(2)有
(3)右
(4)??????????????? ?????????????????????????????????????
实验次数
动力(左侧硬币数)
动力臂/cm
阻力(右侧硬币数)
阻力臂/cm
1
2
3
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿