浙教版科学9上 3.4 简单机械 创优同步学案(含解析)
文档属性
| 名称 | 浙教版科学9上 3.4 简单机械 创优同步学案(含解析) |

|
|
| 格式 | zip | ||
| 文件大小 | 1.8MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2018-08-30 00:00:00 | ||
图片预览

文档简介
中小学教育资源及组卷应用平台
第4节 简单机械
1.如果一根 ____在 ___能绕着固定点_ ___,这根硬棒就叫做杠杆。
2.杠杠的五要素:__ __。
3.杠杆的平衡条件:
__ __。
公式表示:F1l1=F2l2。
注意事项:
①实验中只测量一组数据,具有偶然性,不能得出普遍结论。
②若用弹簧测力计代替钩码,应当沿竖直方向拉测力计,便于力臂的测量。
4、杠杆的分类及应用
名称 力臂关系 力的关系 特点 应用举例
省力杠杆 _ __ _ __ 省力但__ __ 撬棒、铡刀、羊角锤、起子等
费力杠杆 _ __ _ __ 费力但__ __ 理发剪子、钓鱼竿、镊子等
等臂杠杆 _ __ _ __ 既_ __也_ _ 天平、定滑轮
5.有用功:_ __。
6.额外功或无用功: 不需要,但又不得不做的那部分功 。
7.总功:__ __的总和。W总=W有用+W额外,W有用8.机械效率:__ __。
η==×100%。
项目 定滑轮 动滑轮 滑轮组
示意图
力的关系 定滑轮是_ __,_ __,_ __ 动滑轮是__ __的杠杆,使用动滑轮可以省__ __即_ __ 滑轮组既能__ __又能改变__ __。重物和动滑轮的总重力由__ __,提起重物所用的力就是总重力的__ __即__ __,拉力所通过的距离为物体上升_
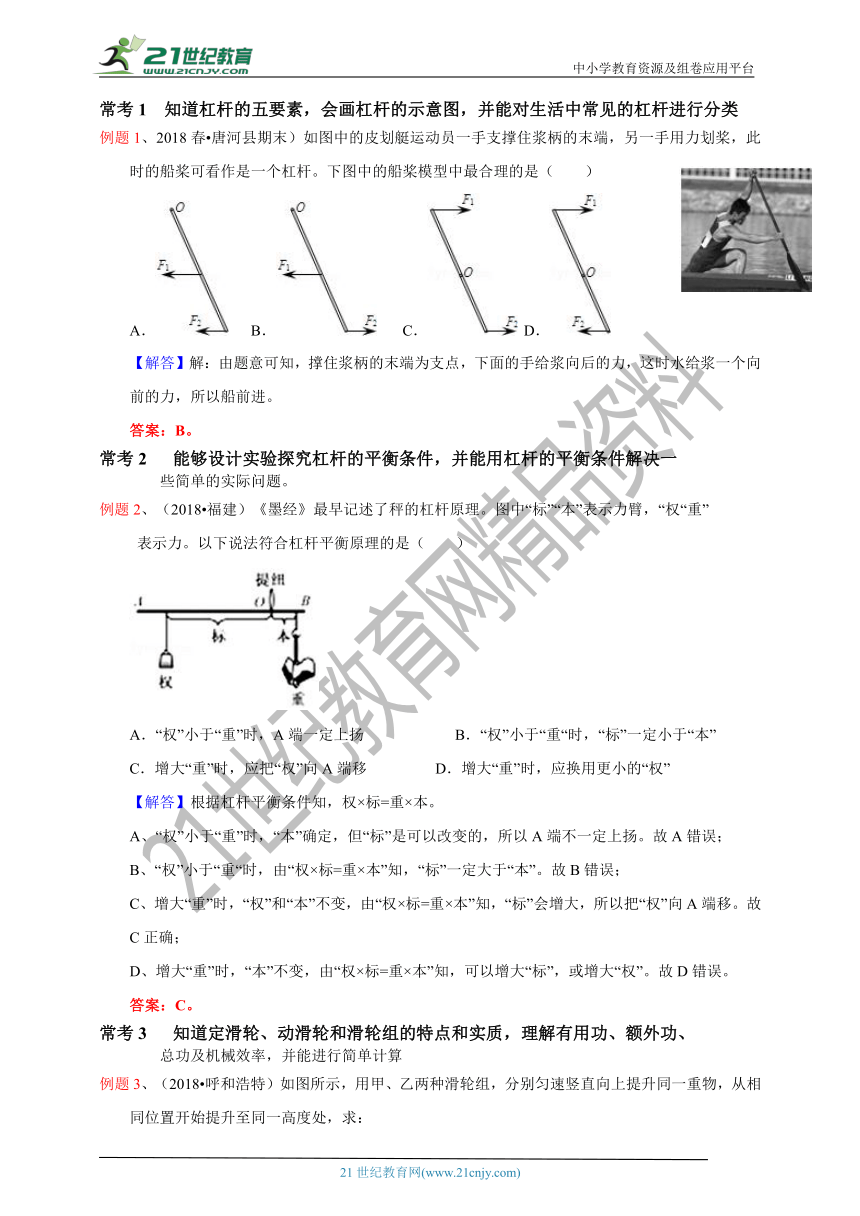
常考1 知道杠杆的五要素,会画杠杆的示意图,并能对生活中常见的杠杆进行分类
例题1、2018春 唐河县期末)如图中的皮划艇运动员一手支撑住浆柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B. C. D.
【解答】解:由题意可知,撑住浆柄的末端为支点,下面的手给浆向后的力,这时水给浆一个向前的力,所以船前进。
答案:B。
常考2 能够设计实验探究杠杆的平衡条件,并能用杠杆的平衡条件解决一
些简单的实际问题。
例题2、(2018 福建)《墨经》最早记述了秤的杠杆原理。图中“标”“本”表示力臂,“权“重”
表示力。以下说法符合杠杆平衡原理的是( )
A.“权”小于“重”时,A端一定上扬 B.“权”小于“重“时,“标”一定小于“本”
C.增大“重”时,应把“权”向A端移 D.增大“重”时,应换用更小的“权”
【解答】根据杠杆平衡条件知,权×标=重×本。
A、“权”小于“重”时,“本”确定,但“标”是可以改变的,所以A端不一定上扬。故A错误;
B、“权”小于“重“时,由“权×标=重×本”知,“标”一定大于“本”。故B错误;
C、增大“重”时,“权”和“本”不变,由“权×标=重×本”知,“标”会增大,所以把“权”向A端移。故C正确;
D、增大“重”时,“本”不变,由“权×标=重×本”知,可以增大“标”,或增大“权”。故D错误。
答案:C。
常考3 知道定滑轮、动滑轮和滑轮组的特点和实质,理解有用功、额外功、
总功及机械效率,并能进行简单计算
例题3、(2018 呼和浩特)如图所示,用甲、乙两种滑轮组,分别匀速竖直向上提升同一重物,从相同位置开始提升至同一高度处,求:
(1)若不计绳重,滑轮重及摩擦,两次拉力F1和F2之比;
(2)若不计绳重及摩擦,重物质量为400g,动滑轮质量为100g,匀速拉动过程中甲、乙两装置的机械效率。
【解答】
(1)由图知,甲图中,n1=2;乙图中,n2=3,
若不计绳重、滑轮重及摩擦,则拉力F=G,
两次拉力F1和F2之比:
F1:F2=G:G=:=3:2;
(2)重物的重力:G=mg=0.4kg×10N/kg=4N,
动滑轮的重力:G轮=m轮g=0.1kg×10N/kg=1N,
不计绳重及摩擦时,滑轮组的机械效率η===,
由于两装置中物重和动滑轮重均相同,所以甲、乙两装置的机械效率:
η1=η2==×100%=80%。
答:(1)若不计绳重、滑轮重及摩擦,两次拉力F1和F2之比为3:2;
(2)若不计绳重及摩擦,甲、乙两装置的机械效率都是80%
1.(2018 宁波)如图所示,F1=4N,F2=3N,此时物体A相对于地面静止,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。下列说法错误的是( )
A.F2的功率为0.6W B.弹簧测力计读数为9N
C.物体A和地面之间有摩擦力 D.如果增大F2,物体A可能向左运动
2.(2018 长宁区二模)如图所示的杠杆,作用在杠杆上的力F所对应的力臂最长的是( )
B. C. D.
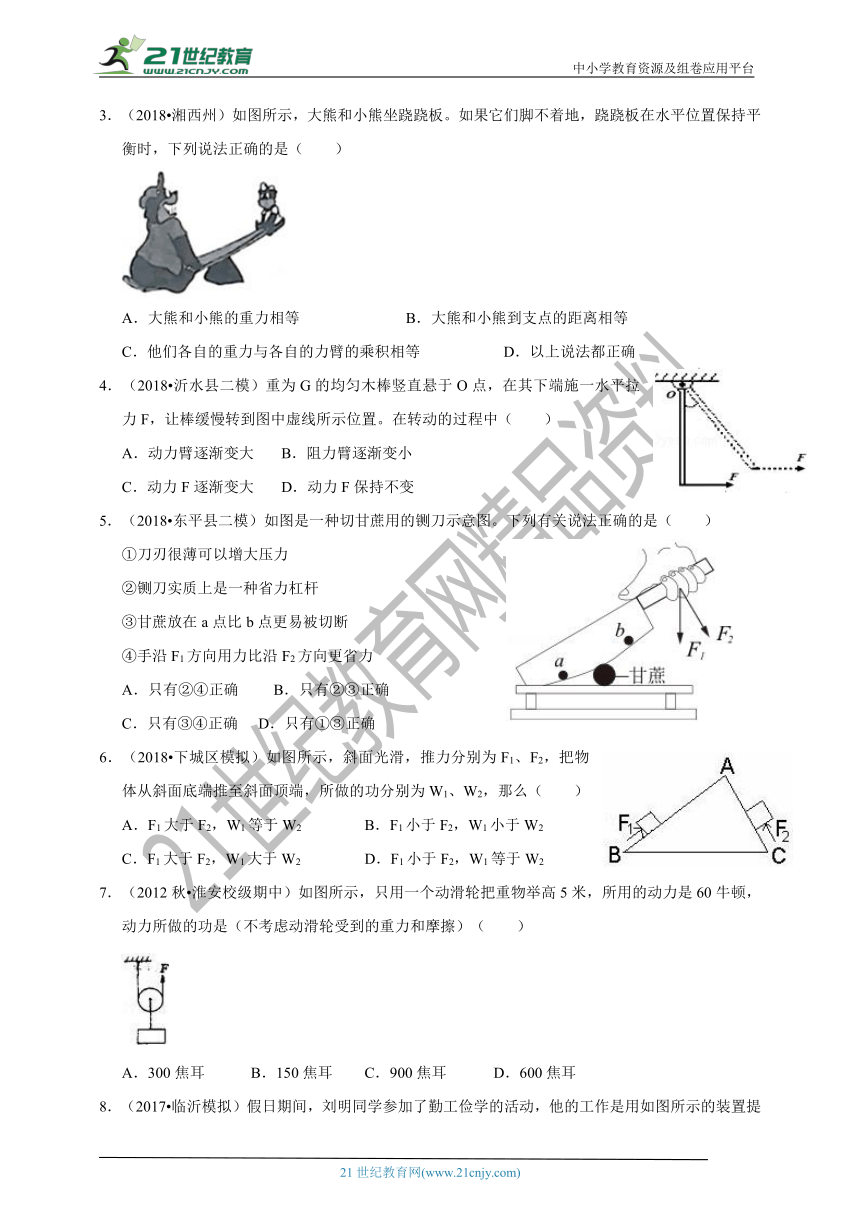
3.(2018 湘西州)如图所示,大熊和小熊坐跷跷板。如果它们脚不着地,跷跷板在水平位置保持平衡时,下列说法正确的是( )
A.大熊和小熊的重力相等 B.大熊和小熊到支点的距离相等
C.他们各自的重力与各自的力臂的乘积相等 D.以上说法都正确
4.(2018 沂水县二模)重为G的均匀木棒竖直悬于O点,在其下端施一水平拉力F,让棒缓慢转到图中虚线所示位置。在转动的过程中( )
A.动力臂逐渐变大 B.阻力臂逐渐变小
C.动力F逐渐变大 D.动力F保持不变
5.(2018 东平县二模)如图是一种切甘蔗用的铡刀示意图。下列有关说法正确的是( )
①刀刃很薄可以增大压力
②铡刀实质上是一种省力杠杆
③甘蔗放在a点比b点更易被切断
④手沿F1方向用力比沿F2方向更省力
A.只有②④正确 B.只有②③正确
C.只有③④正确 D.只有①③正确
6.(2018 下城区模拟)如图所示,斜面光滑,推力分别为F1、F2,把物体从斜面底端推至斜面顶端,所做的功分别为W1、W2,那么( )
A.F1大于F2,W1等于W2 B.F1小于F2,W1小于W2
C.F1大于F2,W1大于W2 D.F1小于F2,W1等于W2
7.(2012秋 淮安校级期中)如图所示,只用一个动滑轮把重物举高5米,所用的动力是60牛顿,动力所做的功是(不考虑动滑轮受到的重力和摩擦)( )
A.300焦耳 B.150焦耳 C.900焦耳 D.600焦耳
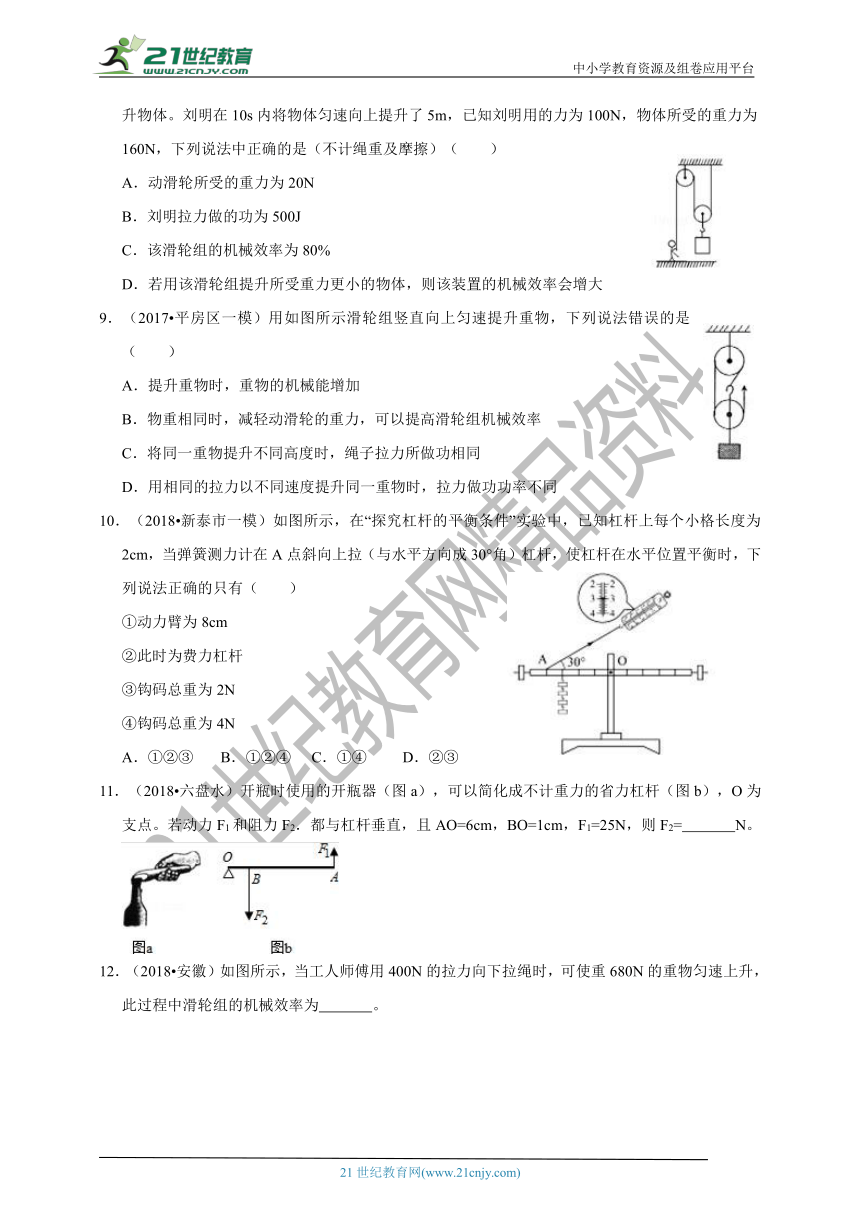
8.(2017 临沂模拟)假日期间,刘明同学参加了勤工俭学的活动,他的工作是用如图所示的装置提升物体。刘明在10s内将物体匀速向上提升了5m,已知刘明用的力为100N,物体所受的重力为160N,下列说法中正确的是(不计绳重及摩擦)( )
A.动滑轮所受的重力为20N
B.刘明拉力做的功为500J
C.该滑轮组的机械效率为80%
D.若用该滑轮组提升所受重力更小的物体,则该装置的机械效率会增大
9.(2017 平房区一模)用如图所示滑轮组竖直向上匀速提升重物,下列说法错误的是( )
A.提升重物时,重物的机械能增加
B.物重相同时,减轻动滑轮的重力,可以提高滑轮组机械效率
C.将同一重物提升不同高度时,绳子拉力所做功相同
D.用相同的拉力以不同速度提升同一重物时,拉力做功功率不同
10.(2018 新泰市一模)如图所示,在“探究杠杆的平衡条件”实验中,已知杠杆上每个小格长度为2cm,当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡时,下列说法正确的只有( )
①动力臂为8cm
②此时为费力杠杆
③钩码总重为2N
④钩码总重为4N
A.①②③ B.①②④ C.①④ D.②③
11.(2018 六盘水)开瓶时使用的开瓶器(图a),可以简化成不计重力的省力杠杆(图b),O为支点。若动力F1和阻力F2.都与杠杆垂直,且AO=6cm,BO=1cm,F1=25N,则F2= N。
12.(2018 安徽)如图所示,当工人师傅用400N的拉力向下拉绳时,可使重680N的重物匀速上升,此过程中滑轮组的机械效率为 。
13.(2018 昆明)如图所示,轻质杠杆OA可绕O点无摩擦转动,A点处挂一个重为20N的物体,B点处加一个竖直向上的力F,杠杆在水平位置平衡,且OB:AB=2:1.则F= N,它是 杠杆。
14.(2018 徐州)如图所示,工人师傅用动滑轮匀速提升重物。使用动滑轮的好处是 。若物体重450N,工人所用拉力为250N,则动滑轮的机械效率为 ;用该滑轮匀速提升重600N的物体,若不计绳重和摩擦,则工人所用的拉力为 N。
15.(2018 天津)利用图甲中的撬棒撬石块时,撬林相当于 (选填“省力”或“费力”)杠杆:利用图乙中的滑轮组匀速提升900N的重物时,若忽略滑轮自重、绳重及摩擦,人对绳的最小拉力为 N。
16.(2018 凉山州)在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向
(选填“左”或“右”)调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在A处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在B处的钩码向右移动 格。
(3)若取掉乙图中挂在B处的钩码,改用弹簧测力计钩在C处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点O两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律”)
17.(2018 兰山区模拟)为了将放置在水平地面上重G=100N的重物提升到高处,小明同学设计了图(甲)所示的滑轮组装置。当小明用图(乙)所示随时间变化的竖直向下拉力F拉绳时,重物的速度v和高度随时间t变化的关系图象如图(丙)(丁)所示。绳对滑轮的拉力方向均可看成在竖直方向。(不计绳重和摩擦)求:
(1)在2~3s内,拉力F的功率P及滑轮组的机械效率η。
(2)在1~2s内,拉力F做的功W。
(3)若绳子能承受的最大拉力是1500N,小李体重500N,他站在地面向下拉绳子使物体匀速上升,最大能提升多重的物体?
参考答案
知识聚焦
1、硬棒 _力的作用下 转动
2、支点、动力、阻力、动力臂、阻力臂
3、动力乘动力臂等于阻力乘阻力臂
4、L1>L2 F1<F2 费距离
L1<L2 F1>F2 省距离
L1=L2 F1=F2 不省力不费力
5、必须要做的这部分功
7、有用功与额外功
8、有用功跟总功的比值 等臂杠杆 , 不省力 , 但可以改变力的方向 动力臂等于阻力臂二倍 一半的力 F= 省力 力的方向 几段绳子承担 几分之一 F=G 距离的几倍
知能提升突破
1.【解答】解:
A、由图知,水平使用滑轮组,n=2,拉力端移动速度v=2v物=2×0.1m/s=0.2m/s,拉力做功功率P2=F2v=3N×0.2m/s=0.6W,故A正确;
B、不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦,弹簧测力计的示数F=3F2=3×3N=9N,故B正确;
C、对于物体A,受到的力:
B向左的摩擦力fB=2F2=2×3N=6N、
向右的拉力F1=4N、
因为A静止,所以地面向右的摩擦力f地=fB﹣F1=6N﹣4N=2N,所以物体A与地面之间有摩擦力,故C正确;
D、如果增大F2,B将做加速运动,B对A的压力和接触面的粗糙程度不变,B与A之间的摩擦力不变,A受力不变,还是处于静止状态,故D错。
答案:D。
2.【解答】解:
设每一小格长度为L,A中F所对应的力臂3L;B中F所对应的力臂0;C中F所对应的力臂4L;D中F所对应的力臂4L×sin45°=4L×=2L.故CF所对应的力臂最长。
答案:C。
3.【解答】解:
A、由图可知,大熊重力应大于小熊的重力,故A错误;
BCD、由题知,它们脚不着地,跷跷板在水平位置保持平衡,由杠杆的平衡条件知,它们各自的重力与各自的力臂的乘积相等,故C正确;
熊对跷跷板压力大小等于各自的重力,所以大熊的力臂小于小熊的力臂,即它们到支点的距离不相等,故B错误;
综上所述D错误。
答案:C。
4.【解答】解:(1)杠杆在转动的过程中符合杠杆平衡的条件,即阻力为硬棒的重力,大小不变,硬棒在竖直位置时,重力的力臂为0,转过θ角后,重力力臂(阻力臂)逐渐增大,故B错;
(2)当硬棒在竖直位置时,F的力臂是杠杆的长度,且力臂最长,当杠杆转过θ后,力与杠杆不再垂直,所以动力臂变小,故A错;
根据杠杆平衡的条件可得,阻力与阻力臂的乘积增大,而动力臂减小,所以动力逐渐增大,故D错误,C正确;
答案:C。
5.【解答】解:
①刀刃很薄,是通过减小受力面积来增大压强的,故①错误;
②铡刀在使用时动力臂大于阻力臂,实质上是一种省力杠杆,故②正确;
③由图知,甘蔗放在a点比b点时的阻力臂更小,而甘蔗对铡刀的阻力一定,根据杠杆的平衡条件可知,动力会越小,更易被切断,故③正确;
④由图知,手沿F1方向用力比沿F2方向用力时的动力臂要小,根据杠杆平衡条件可知,动力越大(即费力),故④错误。
综合分析可知,只有②③正确。
答案:B。
6.【解答】解:①∵斜面光滑说明摩擦力为0,即使用光滑的斜面没有额外功,
∴把同一物体沿斜面BA和CA分别拉到顶端A,h相同,由W=Gh可知两次做的功相同,即W1=W2,
②从图可知,LBA>LCA,
而W1=W2,
∴F1<F2,
答案:D。
7.【解答】解:s=2h=2×5m=10m,
动力所做的功:
W=Fs=60N×10m=600J。
答案:D。
8.【解答】解:
A、由图知,通过动滑轮绳子的段数n=2,
不计绳重及摩擦,由F=(G物+G滑)可得动滑轮所受的重力:
G动=2F﹣G物=2×100N﹣160N=40N,故A错误;
B、刘明拉力做的功:
W总=Fs=Fnh=100N×2×5m=1000J,故B错误;
C、有用功:W有=Gh=160N×5m=800J,
所以滑轮组的机械效率为:η=×100%=×100%=80%,故C正确;
D、若仅减小提升物体的重力,额外功不变,有用功减小,有用功在总功中所占的比例减小,机械效率减小,故D错误。
答案:C。
9.【解答】解:
A、匀速提升物体时,动能不变,高度增加,重力势能增加,故重物的机械能增加,故A正确;
B、减轻动滑轮的重力,在提升物体重力不变的情况下,即有用功不变的情况下,额外功减小了,所以机械效率就提高了,故B正确;
C、将同一重物提升不同高度时,拉力相同,增加提升高度时,绳端移动的距离也变长了,根据W=Fs知绳子拉力所做功不相同,故C错误;
D、用相同的拉力以不同速度提升同一重物时,根据P=Fv知,拉力做功功率不同,故D正确。
答案:C。
10.【解答】解:
如图:
①当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,此时动力臂为OB,根据直角三角形的知识可知,此时的力臂OB=OA=×4×2cm=4cm,故①错误;
②阻力臂的大小:L2=3×2cm=6cm>L1,杠杆为费力杠杆,故②正确;
③④由图中弹簧测力计指针在3N,弹簧测力计的示数为3N;根据杠杆的平衡条件F1L1=GL2得G===2N,故③正确,④错误。
答案:D。
11.【解答】解:由杠杆的平衡条件得:F1L1=F2L2
F1×AO=F2×BO
25N×6cm=F2×1cm
F2=150N
答案 150。
12.【解答】解:
由图可知,滑轮组承担物重的绳子段数:n=2,
由η====得,滑轮组的机械效率:
η=×100%=×100%=85%。
答案:85%。
13.【解答】解:因为OB:AB=2:1,
所以OB:OA=OB:(OB+AB)=2:(2+1)=2:3
由杠杆平衡的条件F得:F OB=G OA可得:
即:F===30N;
因为F>G,
所以此杠杆为费力杠杆。
答案:30;费力。
14.【解答】解:(1)动滑轮的实质是动力臂为阻力臂2倍个杠杆,使用动滑轮的好处是省一半力,但不能改变动力的方向;
(2)不考虑绳重和摩擦,
因为F=(G物+G轮),即:250N=(450N+G轮),
所以动滑轮重:
G轮=50N,
η======90%;
(3)F═(G物+G轮)=(600N+50N)=325N。
答案:省力;90%;325。
15.【解答】解:(1)用撬棒撬石头时,动力臂大于阻力臂,是省力杠杆;
(2)由乙图可知绳子的有效股数n=3,
拉力F=G物=×900N=300N。
答案:省力;300。
16.【解答】解:(1)调节杠杆在水平位置平衡,杠杆右端偏高,右端的平衡螺母应向上翘的右端移动,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响;
(2)设一个钩码重为G,一格的长度为L;
根据杠杆的平衡条件可得:4G×2L=2G×nL,
解得:n=4,
故应该将B处所挂钩码须向右移动4﹣3=1格;
(3)阻力与阻力臂一定时,由杠杆平衡条件可知,当动力臂最大时,动力最小,力的作用点与支点一定,最大力臂为支点到力的作用点的距离,力应与杠杆垂直,为使拉力最小,应竖直向上拉弹簧测力计;
(4)探究杠杆平衡的条件时进行多次实验,多次改变挂在支点O两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是通过实验数据总结实验结论,使实验结论具有普遍性,避免偶然性。
答案:(1)右;杠杆自重;测量力臂;(2)1;(3)竖直向上;(4)寻找普遍规律。
17.【解答】解:(1)由图象可知,在2~3s内,重物做匀速运动,v1=2.50 m/s,拉力F1=40N,
因为连接动滑轮的绳子有三根,所以拉力F的作用点下降的距离是重物上升高度h1的3倍。
拉力F的功率P=F1v2=40N×7.5m/s=300W;
滑轮组的机械效率:
η=×100%=×100%=×100%=×100%≈83.3%。
(2)在1~2s内,拉力F2=50N,重物上升高度h=1.25m,拉力通过的距离s=3h=3×1.25m=3.75m,
拉力F所做的功W=F2s=50N×3.75m=187.5J;
(3)不计绳重和摩擦,拉力F1=(G+G动),则G动=3F﹣G=3×40N﹣100N=20N,
绳子能承受的最大拉力是1500N,所以物体的最大重力为G大=3F大﹣G动=3×500N﹣20N=1480N。
答案:(1)在2~3s内,拉力F的功率P为300W,滑轮组的机械效率为83.3%;
(2)在1~2s内,拉力F所做的功W为187.5J;
(3)最大能提升1480N的物体。
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
HYPERLINK "http://21世纪教育网(www.21cnjy.com)
" 21世纪教育网(www.21cnjy.com)
第4节 简单机械
1.如果一根 ____在 ___能绕着固定点_ ___,这根硬棒就叫做杠杆。
2.杠杠的五要素:__ __。
3.杠杆的平衡条件:
__ __。
公式表示:F1l1=F2l2。
注意事项:
①实验中只测量一组数据,具有偶然性,不能得出普遍结论。
②若用弹簧测力计代替钩码,应当沿竖直方向拉测力计,便于力臂的测量。
4、杠杆的分类及应用
名称 力臂关系 力的关系 特点 应用举例
省力杠杆 _ __ _ __ 省力但__ __ 撬棒、铡刀、羊角锤、起子等
费力杠杆 _ __ _ __ 费力但__ __ 理发剪子、钓鱼竿、镊子等
等臂杠杆 _ __ _ __ 既_ __也_ _ 天平、定滑轮
5.有用功:_ __。
6.额外功或无用功: 不需要,但又不得不做的那部分功 。
7.总功:__ __的总和。W总=W有用+W额外,W有用
η==×100%。
项目 定滑轮 动滑轮 滑轮组
示意图
力的关系 定滑轮是_ __,_ __,_ __ 动滑轮是__ __的杠杆,使用动滑轮可以省__ __即_ __ 滑轮组既能__ __又能改变__ __。重物和动滑轮的总重力由__ __,提起重物所用的力就是总重力的__ __即__ __,拉力所通过的距离为物体上升_
常考1 知道杠杆的五要素,会画杠杆的示意图,并能对生活中常见的杠杆进行分类
例题1、2018春 唐河县期末)如图中的皮划艇运动员一手支撑住浆柄的末端,另一手用力划桨,此时的船桨可看作是一个杠杆。下图中的船桨模型中最合理的是( )
A. B. C. D.
【解答】解:由题意可知,撑住浆柄的末端为支点,下面的手给浆向后的力,这时水给浆一个向前的力,所以船前进。
答案:B。
常考2 能够设计实验探究杠杆的平衡条件,并能用杠杆的平衡条件解决一
些简单的实际问题。
例题2、(2018 福建)《墨经》最早记述了秤的杠杆原理。图中“标”“本”表示力臂,“权“重”
表示力。以下说法符合杠杆平衡原理的是( )
A.“权”小于“重”时,A端一定上扬 B.“权”小于“重“时,“标”一定小于“本”
C.增大“重”时,应把“权”向A端移 D.增大“重”时,应换用更小的“权”
【解答】根据杠杆平衡条件知,权×标=重×本。
A、“权”小于“重”时,“本”确定,但“标”是可以改变的,所以A端不一定上扬。故A错误;
B、“权”小于“重“时,由“权×标=重×本”知,“标”一定大于“本”。故B错误;
C、增大“重”时,“权”和“本”不变,由“权×标=重×本”知,“标”会增大,所以把“权”向A端移。故C正确;
D、增大“重”时,“本”不变,由“权×标=重×本”知,可以增大“标”,或增大“权”。故D错误。
答案:C。
常考3 知道定滑轮、动滑轮和滑轮组的特点和实质,理解有用功、额外功、
总功及机械效率,并能进行简单计算
例题3、(2018 呼和浩特)如图所示,用甲、乙两种滑轮组,分别匀速竖直向上提升同一重物,从相同位置开始提升至同一高度处,求:
(1)若不计绳重,滑轮重及摩擦,两次拉力F1和F2之比;
(2)若不计绳重及摩擦,重物质量为400g,动滑轮质量为100g,匀速拉动过程中甲、乙两装置的机械效率。
【解答】
(1)由图知,甲图中,n1=2;乙图中,n2=3,
若不计绳重、滑轮重及摩擦,则拉力F=G,
两次拉力F1和F2之比:
F1:F2=G:G=:=3:2;
(2)重物的重力:G=mg=0.4kg×10N/kg=4N,
动滑轮的重力:G轮=m轮g=0.1kg×10N/kg=1N,
不计绳重及摩擦时,滑轮组的机械效率η===,
由于两装置中物重和动滑轮重均相同,所以甲、乙两装置的机械效率:
η1=η2==×100%=80%。
答:(1)若不计绳重、滑轮重及摩擦,两次拉力F1和F2之比为3:2;
(2)若不计绳重及摩擦,甲、乙两装置的机械效率都是80%
1.(2018 宁波)如图所示,F1=4N,F2=3N,此时物体A相对于地面静止,物体B以0.1m/s的速度在物体A表面向左做匀速直线运动(不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦)。下列说法错误的是( )
A.F2的功率为0.6W B.弹簧测力计读数为9N
C.物体A和地面之间有摩擦力 D.如果增大F2,物体A可能向左运动
2.(2018 长宁区二模)如图所示的杠杆,作用在杠杆上的力F所对应的力臂最长的是( )
B. C. D.
3.(2018 湘西州)如图所示,大熊和小熊坐跷跷板。如果它们脚不着地,跷跷板在水平位置保持平衡时,下列说法正确的是( )
A.大熊和小熊的重力相等 B.大熊和小熊到支点的距离相等
C.他们各自的重力与各自的力臂的乘积相等 D.以上说法都正确
4.(2018 沂水县二模)重为G的均匀木棒竖直悬于O点,在其下端施一水平拉力F,让棒缓慢转到图中虚线所示位置。在转动的过程中( )
A.动力臂逐渐变大 B.阻力臂逐渐变小
C.动力F逐渐变大 D.动力F保持不变
5.(2018 东平县二模)如图是一种切甘蔗用的铡刀示意图。下列有关说法正确的是( )
①刀刃很薄可以增大压力
②铡刀实质上是一种省力杠杆
③甘蔗放在a点比b点更易被切断
④手沿F1方向用力比沿F2方向更省力
A.只有②④正确 B.只有②③正确
C.只有③④正确 D.只有①③正确
6.(2018 下城区模拟)如图所示,斜面光滑,推力分别为F1、F2,把物体从斜面底端推至斜面顶端,所做的功分别为W1、W2,那么( )
A.F1大于F2,W1等于W2 B.F1小于F2,W1小于W2
C.F1大于F2,W1大于W2 D.F1小于F2,W1等于W2
7.(2012秋 淮安校级期中)如图所示,只用一个动滑轮把重物举高5米,所用的动力是60牛顿,动力所做的功是(不考虑动滑轮受到的重力和摩擦)( )
A.300焦耳 B.150焦耳 C.900焦耳 D.600焦耳
8.(2017 临沂模拟)假日期间,刘明同学参加了勤工俭学的活动,他的工作是用如图所示的装置提升物体。刘明在10s内将物体匀速向上提升了5m,已知刘明用的力为100N,物体所受的重力为160N,下列说法中正确的是(不计绳重及摩擦)( )
A.动滑轮所受的重力为20N
B.刘明拉力做的功为500J
C.该滑轮组的机械效率为80%
D.若用该滑轮组提升所受重力更小的物体,则该装置的机械效率会增大
9.(2017 平房区一模)用如图所示滑轮组竖直向上匀速提升重物,下列说法错误的是( )
A.提升重物时,重物的机械能增加
B.物重相同时,减轻动滑轮的重力,可以提高滑轮组机械效率
C.将同一重物提升不同高度时,绳子拉力所做功相同
D.用相同的拉力以不同速度提升同一重物时,拉力做功功率不同
10.(2018 新泰市一模)如图所示,在“探究杠杆的平衡条件”实验中,已知杠杆上每个小格长度为2cm,当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡时,下列说法正确的只有( )
①动力臂为8cm
②此时为费力杠杆
③钩码总重为2N
④钩码总重为4N
A.①②③ B.①②④ C.①④ D.②③
11.(2018 六盘水)开瓶时使用的开瓶器(图a),可以简化成不计重力的省力杠杆(图b),O为支点。若动力F1和阻力F2.都与杠杆垂直,且AO=6cm,BO=1cm,F1=25N,则F2= N。
12.(2018 安徽)如图所示,当工人师傅用400N的拉力向下拉绳时,可使重680N的重物匀速上升,此过程中滑轮组的机械效率为 。
13.(2018 昆明)如图所示,轻质杠杆OA可绕O点无摩擦转动,A点处挂一个重为20N的物体,B点处加一个竖直向上的力F,杠杆在水平位置平衡,且OB:AB=2:1.则F= N,它是 杠杆。
14.(2018 徐州)如图所示,工人师傅用动滑轮匀速提升重物。使用动滑轮的好处是 。若物体重450N,工人所用拉力为250N,则动滑轮的机械效率为 ;用该滑轮匀速提升重600N的物体,若不计绳重和摩擦,则工人所用的拉力为 N。
15.(2018 天津)利用图甲中的撬棒撬石块时,撬林相当于 (选填“省力”或“费力”)杠杆:利用图乙中的滑轮组匀速提升900N的重物时,若忽略滑轮自重、绳重及摩擦,人对绳的最小拉力为 N。
16.(2018 凉山州)在“探究杠杆的平衡条件”的实验中。
(1)在杠杆上挂钩码前,杠杆静止在甲图中的位置,为使杠杆水平平衡,应将右端的平衡螺母向
(选填“左”或“右”)调节。将杠杆调节水平平衡的目的是避免 对实验的影响和便于 。
(2)乙图中杠杆恰好处于水平平衡,若在A处下方再挂一个相同钩码,为使杠杆保持水平平衡,则需将挂在B处的钩码向右移动 格。
(3)若取掉乙图中挂在B处的钩码,改用弹簧测力计钩在C处对杠杆施拉力,为使杠杆保持水平平衡,且弹簧测力计示数最小,则弹簧测力计对杠杆的拉力方向是 。
(4)此实验多次改变挂在支点O两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是 (选填“减小误差”或“寻找普遍规律”)
17.(2018 兰山区模拟)为了将放置在水平地面上重G=100N的重物提升到高处,小明同学设计了图(甲)所示的滑轮组装置。当小明用图(乙)所示随时间变化的竖直向下拉力F拉绳时,重物的速度v和高度随时间t变化的关系图象如图(丙)(丁)所示。绳对滑轮的拉力方向均可看成在竖直方向。(不计绳重和摩擦)求:
(1)在2~3s内,拉力F的功率P及滑轮组的机械效率η。
(2)在1~2s内,拉力F做的功W。
(3)若绳子能承受的最大拉力是1500N,小李体重500N,他站在地面向下拉绳子使物体匀速上升,最大能提升多重的物体?
参考答案
知识聚焦
1、硬棒 _力的作用下 转动
2、支点、动力、阻力、动力臂、阻力臂
3、动力乘动力臂等于阻力乘阻力臂
4、L1>L2 F1<F2 费距离
L1<L2 F1>F2 省距离
L1=L2 F1=F2 不省力不费力
5、必须要做的这部分功
7、有用功与额外功
8、有用功跟总功的比值 等臂杠杆 , 不省力 , 但可以改变力的方向 动力臂等于阻力臂二倍 一半的力 F= 省力 力的方向 几段绳子承担 几分之一 F=G 距离的几倍
知能提升突破
1.【解答】解:
A、由图知,水平使用滑轮组,n=2,拉力端移动速度v=2v物=2×0.1m/s=0.2m/s,拉力做功功率P2=F2v=3N×0.2m/s=0.6W,故A正确;
B、不计弹簧测力计、滑轮和绳子的自重及滑轮和绳子之间的摩擦,弹簧测力计的示数F=3F2=3×3N=9N,故B正确;
C、对于物体A,受到的力:
B向左的摩擦力fB=2F2=2×3N=6N、
向右的拉力F1=4N、
因为A静止,所以地面向右的摩擦力f地=fB﹣F1=6N﹣4N=2N,所以物体A与地面之间有摩擦力,故C正确;
D、如果增大F2,B将做加速运动,B对A的压力和接触面的粗糙程度不变,B与A之间的摩擦力不变,A受力不变,还是处于静止状态,故D错。
答案:D。
2.【解答】解:
设每一小格长度为L,A中F所对应的力臂3L;B中F所对应的力臂0;C中F所对应的力臂4L;D中F所对应的力臂4L×sin45°=4L×=2L.故CF所对应的力臂最长。
答案:C。
3.【解答】解:
A、由图可知,大熊重力应大于小熊的重力,故A错误;
BCD、由题知,它们脚不着地,跷跷板在水平位置保持平衡,由杠杆的平衡条件知,它们各自的重力与各自的力臂的乘积相等,故C正确;
熊对跷跷板压力大小等于各自的重力,所以大熊的力臂小于小熊的力臂,即它们到支点的距离不相等,故B错误;
综上所述D错误。
答案:C。
4.【解答】解:(1)杠杆在转动的过程中符合杠杆平衡的条件,即阻力为硬棒的重力,大小不变,硬棒在竖直位置时,重力的力臂为0,转过θ角后,重力力臂(阻力臂)逐渐增大,故B错;
(2)当硬棒在竖直位置时,F的力臂是杠杆的长度,且力臂最长,当杠杆转过θ后,力与杠杆不再垂直,所以动力臂变小,故A错;
根据杠杆平衡的条件可得,阻力与阻力臂的乘积增大,而动力臂减小,所以动力逐渐增大,故D错误,C正确;
答案:C。
5.【解答】解:
①刀刃很薄,是通过减小受力面积来增大压强的,故①错误;
②铡刀在使用时动力臂大于阻力臂,实质上是一种省力杠杆,故②正确;
③由图知,甘蔗放在a点比b点时的阻力臂更小,而甘蔗对铡刀的阻力一定,根据杠杆的平衡条件可知,动力会越小,更易被切断,故③正确;
④由图知,手沿F1方向用力比沿F2方向用力时的动力臂要小,根据杠杆平衡条件可知,动力越大(即费力),故④错误。
综合分析可知,只有②③正确。
答案:B。
6.【解答】解:①∵斜面光滑说明摩擦力为0,即使用光滑的斜面没有额外功,
∴把同一物体沿斜面BA和CA分别拉到顶端A,h相同,由W=Gh可知两次做的功相同,即W1=W2,
②从图可知,LBA>LCA,
而W1=W2,
∴F1<F2,
答案:D。
7.【解答】解:s=2h=2×5m=10m,
动力所做的功:
W=Fs=60N×10m=600J。
答案:D。
8.【解答】解:
A、由图知,通过动滑轮绳子的段数n=2,
不计绳重及摩擦,由F=(G物+G滑)可得动滑轮所受的重力:
G动=2F﹣G物=2×100N﹣160N=40N,故A错误;
B、刘明拉力做的功:
W总=Fs=Fnh=100N×2×5m=1000J,故B错误;
C、有用功:W有=Gh=160N×5m=800J,
所以滑轮组的机械效率为:η=×100%=×100%=80%,故C正确;
D、若仅减小提升物体的重力,额外功不变,有用功减小,有用功在总功中所占的比例减小,机械效率减小,故D错误。
答案:C。
9.【解答】解:
A、匀速提升物体时,动能不变,高度增加,重力势能增加,故重物的机械能增加,故A正确;
B、减轻动滑轮的重力,在提升物体重力不变的情况下,即有用功不变的情况下,额外功减小了,所以机械效率就提高了,故B正确;
C、将同一重物提升不同高度时,拉力相同,增加提升高度时,绳端移动的距离也变长了,根据W=Fs知绳子拉力所做功不相同,故C错误;
D、用相同的拉力以不同速度提升同一重物时,根据P=Fv知,拉力做功功率不同,故D正确。
答案:C。
10.【解答】解:
如图:
①当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠杆,此时动力臂为OB,根据直角三角形的知识可知,此时的力臂OB=OA=×4×2cm=4cm,故①错误;
②阻力臂的大小:L2=3×2cm=6cm>L1,杠杆为费力杠杆,故②正确;
③④由图中弹簧测力计指针在3N,弹簧测力计的示数为3N;根据杠杆的平衡条件F1L1=GL2得G===2N,故③正确,④错误。
答案:D。
11.【解答】解:由杠杆的平衡条件得:F1L1=F2L2
F1×AO=F2×BO
25N×6cm=F2×1cm
F2=150N
答案 150。
12.【解答】解:
由图可知,滑轮组承担物重的绳子段数:n=2,
由η====得,滑轮组的机械效率:
η=×100%=×100%=85%。
答案:85%。
13.【解答】解:因为OB:AB=2:1,
所以OB:OA=OB:(OB+AB)=2:(2+1)=2:3
由杠杆平衡的条件F得:F OB=G OA可得:
即:F===30N;
因为F>G,
所以此杠杆为费力杠杆。
答案:30;费力。
14.【解答】解:(1)动滑轮的实质是动力臂为阻力臂2倍个杠杆,使用动滑轮的好处是省一半力,但不能改变动力的方向;
(2)不考虑绳重和摩擦,
因为F=(G物+G轮),即:250N=(450N+G轮),
所以动滑轮重:
G轮=50N,
η======90%;
(3)F═(G物+G轮)=(600N+50N)=325N。
答案:省力;90%;325。
15.【解答】解:(1)用撬棒撬石头时,动力臂大于阻力臂,是省力杠杆;
(2)由乙图可知绳子的有效股数n=3,
拉力F=G物=×900N=300N。
答案:省力;300。
16.【解答】解:(1)调节杠杆在水平位置平衡,杠杆右端偏高,右端的平衡螺母应向上翘的右端移动,使杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小,同时消除杠杆自重对杠杆平衡的影响;
(2)设一个钩码重为G,一格的长度为L;
根据杠杆的平衡条件可得:4G×2L=2G×nL,
解得:n=4,
故应该将B处所挂钩码须向右移动4﹣3=1格;
(3)阻力与阻力臂一定时,由杠杆平衡条件可知,当动力臂最大时,动力最小,力的作用点与支点一定,最大力臂为支点到力的作用点的距离,力应与杠杆垂直,为使拉力最小,应竖直向上拉弹簧测力计;
(4)探究杠杆平衡的条件时进行多次实验,多次改变挂在支点O两边钩码的质量和悬挂位置,收集杠杆平衡时多组动力,动力臂、阻力和阻力臂的数据,其目的是通过实验数据总结实验结论,使实验结论具有普遍性,避免偶然性。
答案:(1)右;杠杆自重;测量力臂;(2)1;(3)竖直向上;(4)寻找普遍规律。
17.【解答】解:(1)由图象可知,在2~3s内,重物做匀速运动,v1=2.50 m/s,拉力F1=40N,
因为连接动滑轮的绳子有三根,所以拉力F的作用点下降的距离是重物上升高度h1的3倍。
拉力F的功率P=F1v2=40N×7.5m/s=300W;
滑轮组的机械效率:
η=×100%=×100%=×100%=×100%≈83.3%。
(2)在1~2s内,拉力F2=50N,重物上升高度h=1.25m,拉力通过的距离s=3h=3×1.25m=3.75m,
拉力F所做的功W=F2s=50N×3.75m=187.5J;
(3)不计绳重和摩擦,拉力F1=(G+G动),则G动=3F﹣G=3×40N﹣100N=20N,
绳子能承受的最大拉力是1500N,所以物体的最大重力为G大=3F大﹣G动=3×500N﹣20N=1480N。
答案:(1)在2~3s内,拉力F的功率P为300W,滑轮组的机械效率为83.3%;
(2)在1~2s内,拉力F所做的功W为187.5J;
(3)最大能提升1480N的物体。
21世纪教育网 www.21cnjy.com 精品试卷·第 2 页 (共 2 页)
HYPERLINK "http://21世纪教育网(www.21cnjy.com)
" 21世纪教育网(www.21cnjy.com)
同课章节目录
- 第1章 物质及其变化
- 第1节 物质的变化
- 第2节 物质的酸碱性
- 第3节 常见的酸
- 第4节 常见的碱
- 第5节 酸和碱之间发生的反应
- 第6节 几种重要的盐
- 第2章 物质转化与材料利用
- 第1节 金属材料
- 第2节 金属的化学性质
- 第3节 有机物和有机合成材料
- 第4节 物质的分类
- 第5节 物质的转化
- 第6节 材料的利用与发展
- 第3章 能量的转化与守恒
- 第1节 能量及其形式
- 第2节 机械能
- 第3节 能量转化的量度
- 第4节 简单机械
- 第5节 物体的内能
- 第6节 电能
- 第7节 核能
- 第8节 能量的转化与守恒
- 第4章 代谢与平衡
- 第1节 食物与营养
- 第2节 食物的消化与吸收
- 第3节 体内物质的运输
- 第4节 能量的获得
- 第5节 体内物质的动态平衡
- 研究性学习课题
- 一 当地酸雨情况以及对农作物和建筑物的影响
- 二 金属对社会发展的作用
- 三 寻找自行车中的杠杆
- 四 怎样防治龋齿