苏科版信息技术五上第21课《机器人沿线走》ppt课件(11张幻灯片)
文档属性
| 名称 | 苏科版信息技术五上第21课《机器人沿线走》ppt课件(11张幻灯片) |

|
|
| 格式 | zip | ||
| 文件大小 | 3.3MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2018-11-19 00:00:00 | ||
图片预览


文档简介
课件11张PPT。第19课 机器人沿线走继续学习任务1、导学牌
2、活动分析
3、知识屋
4、编写程序
5、知识屋
6、实践园
7、讨论坊
8、小结
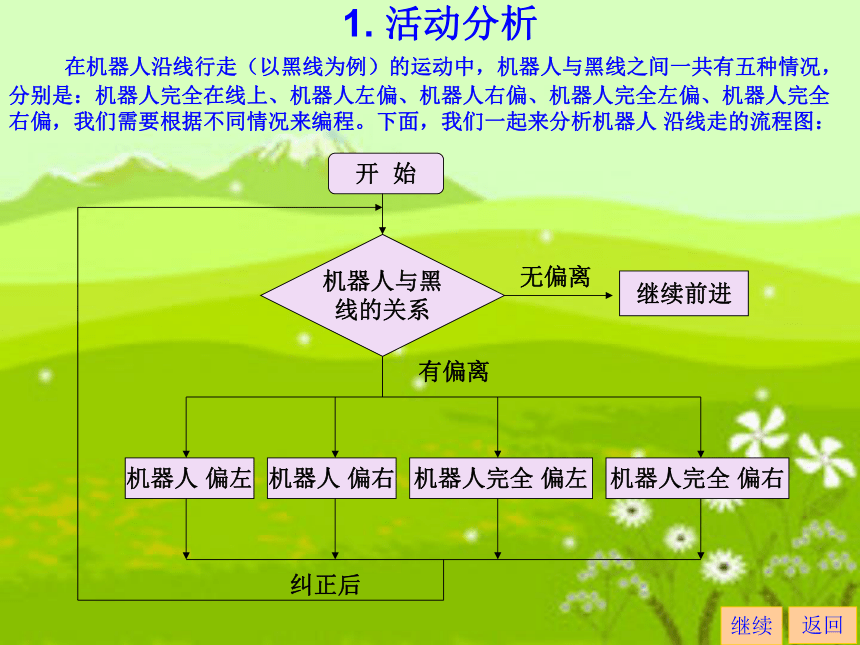
9、成果篮 继续导学牌学习编辑机器人沿黑线走的程序。 当然可以,今天就让我们来学习机器人沿线走。继续返回 机器人可以按照线路走吗?1. 活动分析继续返回 在机器人沿线行走(以黑线为例)的运动中,机器人与黑线之间一共有五种情况,分别是:机器人完全在线上、机器人左偏、机器人右偏、机器人完全左偏、机器人完全右偏,我们需要根据不同情况来编程。下面,我们一起来分析机器人 沿线走的流程图:开 始机器人与黑
线的关系无偏离继续前进有偏离机器人 偏左机器人 偏右机器人完全 偏左机器人完全 偏右纠正后
编程之前,一般要在草稿纸上画出程序的流程图。知识屋继续返回2. 编写程序继续返回启动单击单击单击添加右击单击设置单击添加设置单击单击单击添加单击单击设置单击单击单击添加设置单击同理单击单击添加设置1设置2单击单击单击添加设置单击偏左偏右全左全右保存编译下载
1、变量的名称可以根据需要进行设定。
2、条件循环是指无法预先给定循环次数,而是给出一个条件,满足此条件时就继续执行循环体,否则退出循环的循环过程。
3、电机的速度可以根据实际情况进行了设定,在学生机器人中,最大速度为20。知识屋继续返回实践园 将编写好的程序下载到机器人 主板上,运行机器人,并根据运行情况调试机器人。继续返回讨论坊 1、将自己的机器人与其他同学的机器人进行比较,你能发现哪些优点和我缺点?
2、在机器人的运动过程中,你发现了哪些问题?你是如何解决的?继续返回小结:机器人沿线走继续返回启动单击单击单击添加右击单击设置单击添加设置单击单击单击添加单击单击设置单击单击单击添加设置单击同理单击单击添加设置1设置2单击单击单击添加设置单击偏左偏右全左全右保存编译下载成果篮说一说,学习了本课你有哪些收获?结束返回 机器人偏离黑线有:( )与( )与偏 左 完全左偏偏 右 完全右偏( )( )
2、活动分析
3、知识屋
4、编写程序
5、知识屋
6、实践园
7、讨论坊
8、小结
9、成果篮 继续导学牌学习编辑机器人沿黑线走的程序。 当然可以,今天就让我们来学习机器人沿线走。继续返回 机器人可以按照线路走吗?1. 活动分析继续返回 在机器人沿线行走(以黑线为例)的运动中,机器人与黑线之间一共有五种情况,分别是:机器人完全在线上、机器人左偏、机器人右偏、机器人完全左偏、机器人完全右偏,我们需要根据不同情况来编程。下面,我们一起来分析机器人 沿线走的流程图:开 始机器人与黑
线的关系无偏离继续前进有偏离机器人 偏左机器人 偏右机器人完全 偏左机器人完全 偏右纠正后
编程之前,一般要在草稿纸上画出程序的流程图。知识屋继续返回2. 编写程序继续返回启动单击单击单击添加右击单击设置单击添加设置单击单击单击添加单击单击设置单击单击单击添加设置单击同理单击单击添加设置1设置2单击单击单击添加设置单击偏左偏右全左全右保存编译下载
1、变量的名称可以根据需要进行设定。
2、条件循环是指无法预先给定循环次数,而是给出一个条件,满足此条件时就继续执行循环体,否则退出循环的循环过程。
3、电机的速度可以根据实际情况进行了设定,在学生机器人中,最大速度为20。知识屋继续返回实践园 将编写好的程序下载到机器人 主板上,运行机器人,并根据运行情况调试机器人。继续返回讨论坊 1、将自己的机器人与其他同学的机器人进行比较,你能发现哪些优点和我缺点?
2、在机器人的运动过程中,你发现了哪些问题?你是如何解决的?继续返回小结:机器人沿线走继续返回启动单击单击单击添加右击单击设置单击添加设置单击单击单击添加单击单击设置单击单击单击添加设置单击同理单击单击添加设置1设置2单击单击单击添加设置单击偏左偏右全左全右保存编译下载成果篮说一说,学习了本课你有哪些收获?结束返回 机器人偏离黑线有:( )与( )与偏 左 完全左偏偏 右 完全右偏( )( )