苏科版信息技术五上第22课《机器人机械手》ppt课件(11张幻灯片)
文档属性
| 名称 | 苏科版信息技术五上第22课《机器人机械手》ppt课件(11张幻灯片) |

|
|
| 格式 | zip | ||
| 文件大小 | 2.8MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 苏科版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2018-11-19 00:00:00 | ||
图片预览

文档简介
课件11张PPT。第22课 机器人机械手继续学习任务1、导学牌
2、认识伺服电机
3、知识屋
4、机器人机械手的搭建
5、机器人机械手的程序编写
6、实践园
7、探究屋
8、小结
9、成果篮 继续导学牌了解伺服电机的工作过程。
了解插件拓展模块的设置方法。
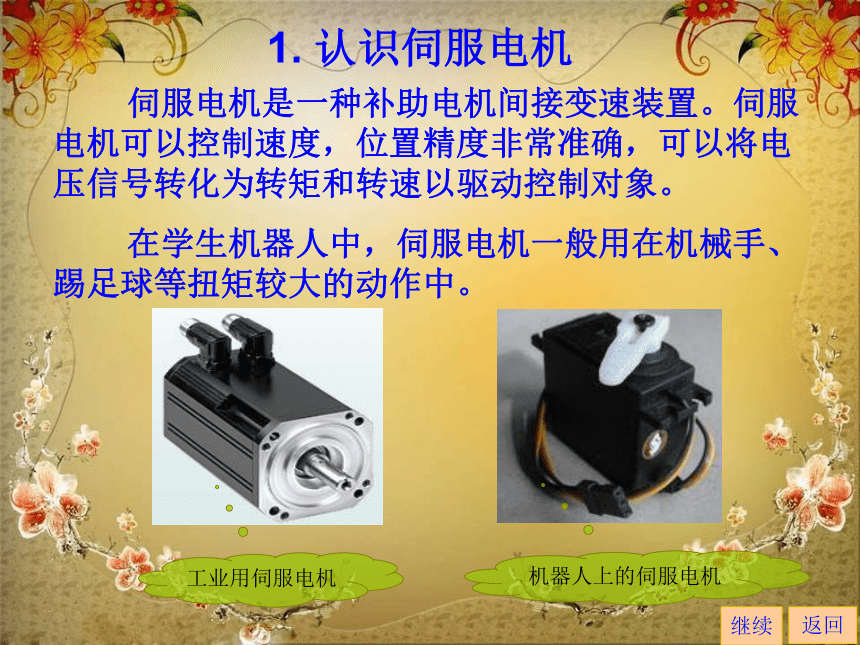
学会编辑机械手运动的程序。 可以呀,你可以根据需要为它增加合适的插件,这样可以完成更多的动作。继续返回 机器人能添加新的模块吗?1. 认识伺服电机继续返回 伺服电机是一种补助电机间接变速装置。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
在学生机器人中,伺服电机一般用在机械手、踢足球等扭矩较大的动作中。工业用伺服电机机器人上的伺服电机
伺服电机分为直流电机和交流电机两大类。
伺服电机具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或速度输出。知识屋继续返回2. 机器人机械手的搭建继续返回 机械手的主要任务是用两个伺服电机来控制机械手臂,从而完成搬运、推动等动作。 1、活动分析:搭建一个简单搬运夹,再利用机器人前端的红外传感器(IO端口)来检测前方是否有物体,如果有物体就将其搬走,如果没有物体就继续前进。 2、搭建机械手:机械手由两个伺服电机、四个两节模块、两个伺服电机链接、两个弯曲九孔、两个固定伺服电机的铜片、螺丝等组成。开始机器人直行读I06的值伺服电机停在某个角度前方是否有物体机器人停0.8秒伺服电机抓取物体机器人前进1秒伺服电机松开物体机器人后退1秒机器人停止前方无物体,直行I06=0I06=13. 机器人机械手的程序编写继续返回启动单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击设置单击右击设置单击单击单击单击右击单击设置单击继续读取IO6的值伺服电机预备状态机器人暂停机械手抓物机器人运物前进机械手放物机器人后退、停止保存编译下载实践园 编写一个机器人机械手的程序,并进行调试。继续返回探究屋(1)你能写出搭建机械风扇的程序吗?
(2)在机器人灭火中,用到了哪些插件和电机?
继续返回小结:机器人机械手继续返回启动单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击设置单击右击设置单击单击单击单击右击单击设置单击继续读取IO6的值伺服电机预备状态机器人暂停机械手抓物机器人运物前进机械手放物机器人后退、停止保存编译下载成果篮说一说,学习了本课你有哪些收获?结束返回 在学生机器人人中,伺服电机一般用在( )、机械手踢足球( )等扭矩较大的动作中。
2、认识伺服电机
3、知识屋
4、机器人机械手的搭建
5、机器人机械手的程序编写
6、实践园
7、探究屋
8、小结
9、成果篮 继续导学牌了解伺服电机的工作过程。
了解插件拓展模块的设置方法。
学会编辑机械手运动的程序。 可以呀,你可以根据需要为它增加合适的插件,这样可以完成更多的动作。继续返回 机器人能添加新的模块吗?1. 认识伺服电机继续返回 伺服电机是一种补助电机间接变速装置。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
在学生机器人中,伺服电机一般用在机械手、踢足球等扭矩较大的动作中。工业用伺服电机机器人上的伺服电机
伺服电机分为直流电机和交流电机两大类。
伺服电机具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或速度输出。知识屋继续返回2. 机器人机械手的搭建继续返回 机械手的主要任务是用两个伺服电机来控制机械手臂,从而完成搬运、推动等动作。 1、活动分析:搭建一个简单搬运夹,再利用机器人前端的红外传感器(IO端口)来检测前方是否有物体,如果有物体就将其搬走,如果没有物体就继续前进。 2、搭建机械手:机械手由两个伺服电机、四个两节模块、两个伺服电机链接、两个弯曲九孔、两个固定伺服电机的铜片、螺丝等组成。开始机器人直行读I06的值伺服电机停在某个角度前方是否有物体机器人停0.8秒伺服电机抓取物体机器人前进1秒伺服电机松开物体机器人后退1秒机器人停止前方无物体,直行I06=0I06=13. 机器人机械手的程序编写继续返回启动单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击设置单击右击设置单击单击单击单击右击单击设置单击继续读取IO6的值伺服电机预备状态机器人暂停机械手抓物机器人运物前进机械手放物机器人后退、停止保存编译下载实践园 编写一个机器人机械手的程序,并进行调试。继续返回探究屋(1)你能写出搭建机械风扇的程序吗?
(2)在机器人灭火中,用到了哪些插件和电机?
继续返回小结:机器人机械手继续返回启动单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击单击单击单击单击右击单击设置单击单击单击单击单击单击单击右击单击设置单击右击设置单击单击单击单击右击单击设置单击继续读取IO6的值伺服电机预备状态机器人暂停机械手抓物机器人运物前进机械手放物机器人后退、停止保存编译下载成果篮说一说,学习了本课你有哪些收获?结束返回 在学生机器人人中,伺服电机一般用在( )、机械手踢足球( )等扭矩较大的动作中。