10.1科学探究:杠杆的平衡条件(综合练习)
文档属性
| 名称 | 10.1科学探究:杠杆的平衡条件(综合练习) |
|
|
| 格式 | zip | ||
| 文件大小 | 1.8MB | ||
| 资源类型 | 试卷 | ||
| 版本资源 | 沪科版 | ||
| 科目 | 物理 | ||
| 更新时间 | 2019-01-08 00:00:00 | ||
图片预览


文档简介
沪科版物理八年级十章机械与人第一节 科学探究:杠杆的平衡条件
同步练习(综合练习)
一.选择题(共15小题)
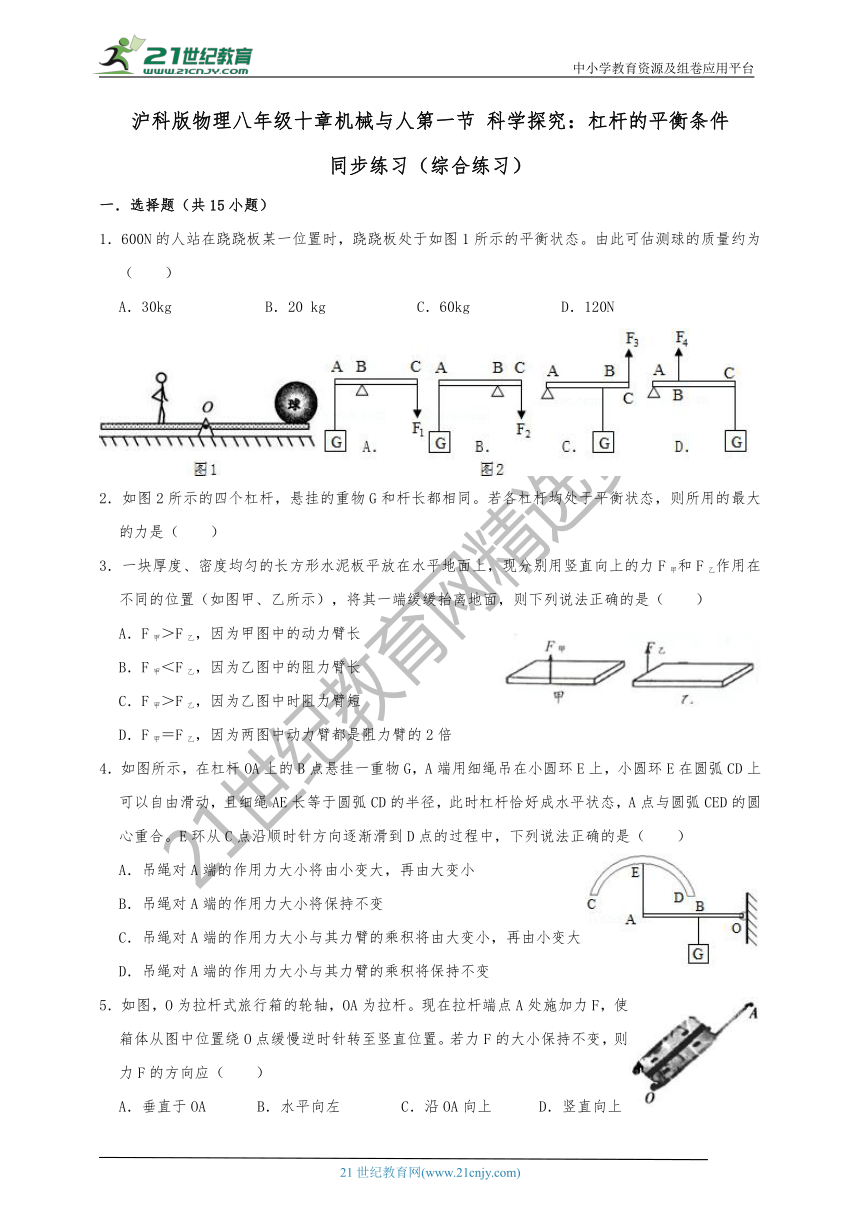
1.600N的人站在跷跷板某一位置时,跷跷板处于如图1所示的平衡状态。由此可估测球的质量约为( )
A.30kg B.20 kg C.60kg D.120N
2.如图2所示的四个杠杆,悬挂的重物G和杆长都相同。若各杠杆均处于平衡状态,则所用的最大的力是( )
3.一块厚度、密度均匀的长方形水泥板平放在水平地面上,现分别用竖直向上的力F甲和F乙作用在不同的位置(如图甲、乙所示),将其一端缓缓抬离地面,则下列说法正确的是( )
A.F甲>F乙,因为甲图中的动力臂长
B.F甲<F乙,因为乙图中的阻力臂长
C.F甲>F乙,因为乙图中时阻力臂短
D.F甲=F乙,因为两图中动力臂都是阻力臂的2倍
4.如图所示,在杠杆OA上的B点悬挂一重物G,A端用细绳吊在小圆环E上,小圆环E在圆弧CD上可以自由滑动,且细绳AE长等于圆弧CD的半径,此时杠杆恰好成水平状态,A点与圆弧CED的圆心重合。E环从C点沿顺时针方向逐渐滑到D点的过程中,下列说法正确的是( )
A.吊绳对A端的作用力大小将由小变大,再由大变小
B.吊绳对A端的作用力大小将保持不变
C.吊绳对A端的作用力大小与其力臂的乘积将由大变小,再由小变大
D.吊绳对A端的作用力大小与其力臂的乘积将保持不变
5.如图,O为拉杆式旅行箱的轮轴,OA为拉杆。现在拉杆端点A处施加力F,使箱体从图中位置绕O点缓慢逆时针转至竖直位置。若力F的大小保持不变,则力F的方向应( )
A.垂直于OA B.水平向左 C.沿OA向上 D.竖直向上
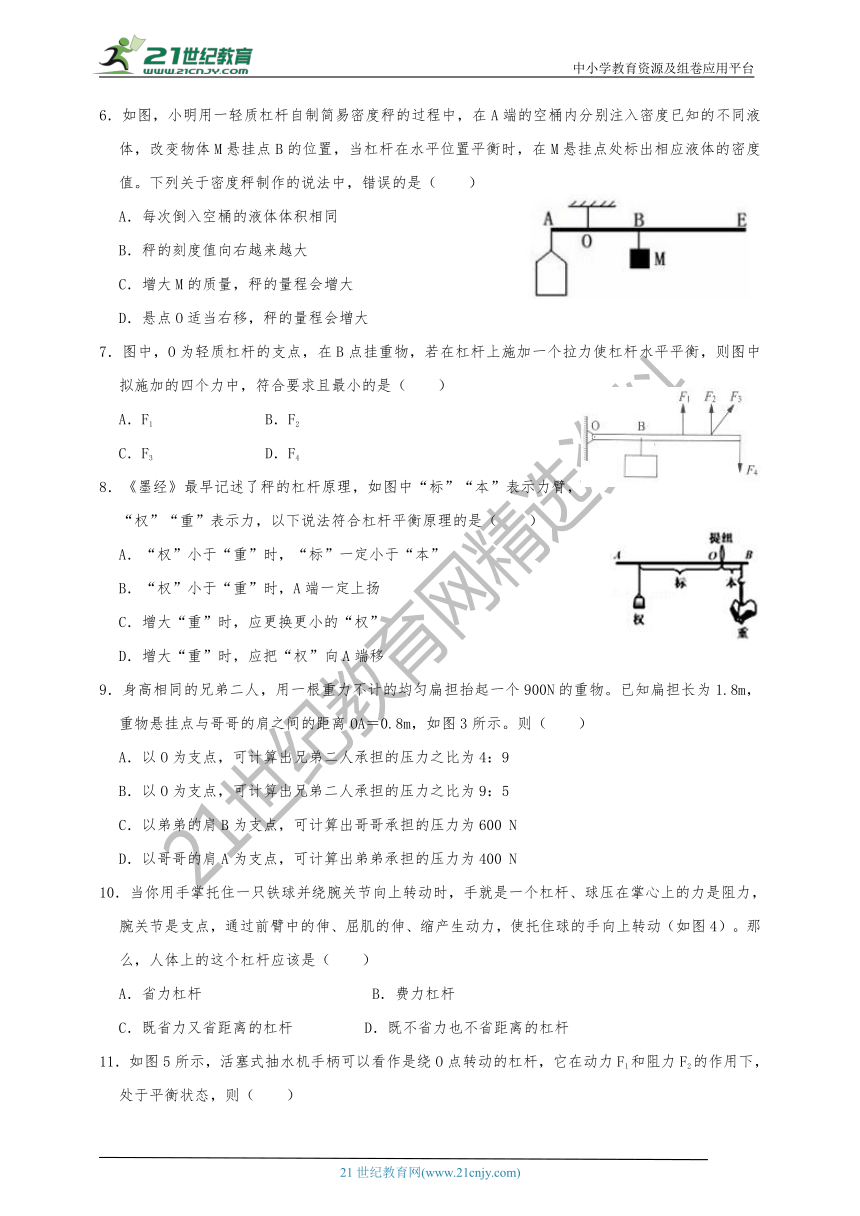
6.如图,小明用一轻质杠杆自制简易密度秤的过程中,在A端的空桶内分别注入密度已知的不同液体,改变物体M悬挂点B的位置,当杠杆在水平位置平衡时,在M悬挂点处标出相应液体的密度值。下列关于密度秤制作的说法中,错误的是( )
A.每次倒入空桶的液体体积相同
B.秤的刻度值向右越来越大
C.增大M的质量,秤的量程会增大
D.悬点O适当右移,秤的量程会增大
7.图中,O为轻质杠杆的支点,在B点挂重物,若在杠杆上施加一个拉力使杠杆水平平衡,则图中拟施加的四个力中,符合要求且最小的是( )
A.F1 B.F2
C.F3 D.F4
8.《墨经》最早记述了秤的杠杆原理,如图中“标”“本”表示力臂,“权”“重”表示力,以下说法符合杠杆平衡原理的是( )
A.“权”小于“重”时,“标”一定小于“本”
B.“权”小于“重”时,A端一定上扬
C.增大“重”时,应更换更小的“权”
D.增大“重”时,应把“权”向A端移
9.身高相同的兄弟二人,用一根重力不计的均匀扁担抬起一个900N的重物。已知扁担长为1.8m,重物悬挂点与哥哥的肩之间的距离OA=0.8m,如图3所示。则( )
A.以O为支点,可计算出兄弟二人承担的压力之比为4:9
B.以O为支点,可计算出兄弟二人承担的压力之比为9:5
C.以弟弟的肩B为支点,可计算出哥哥承担的压力为600 N
D.以哥哥的肩A为支点,可计算出弟弟承担的压力为400 N
10.当你用手掌托住一只铁球并绕腕关节向上转动时,手就是一个杠杆、球压在掌心上的力是阻力,腕关节是支点,通过前臂中的伸、屈肌的伸、缩产生动力,使托住球的手向上转动(如图4)。那么,人体上的这个杠杆应该是( )
A.省力杠杆 B.费力杠杆
C.既省力又省距离的杠杆 D.既不省力也不省距离的杠杆
11.如图5所示,活塞式抽水机手柄可以看作是绕O点转动的杠杆,它在动力F1和阻力F2的作用下,处于平衡状态,则( )
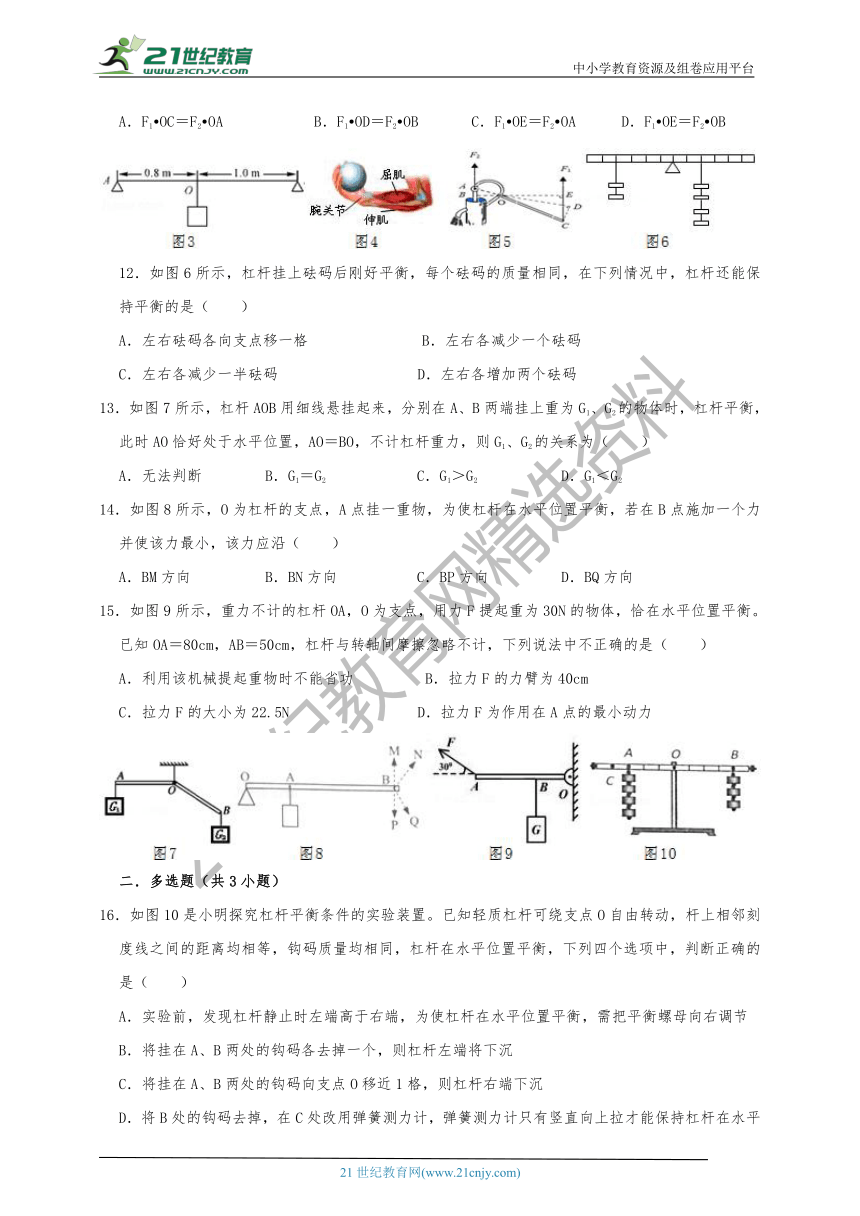
A.F1?OC=F2?OA B.F1?OD=F2?OB C.F1?OE=F2?OA D.F1?OE=F2?OB
12.如图6所示,杠杆挂上砝码后刚好平衡,每个砝码的质量相同,在下列情况中,杠杆还能保持平衡的是( )
A.左右砝码各向支点移一格 B.左右各减少一个砝码
C.左右各减少一半砝码 D.左右各增加两个砝码
13.如图7所示,杠杆AOB用细线悬挂起来,分别在A、B两端挂上重为G1、G2的物体时,杠杆平衡,此时AO恰好处于水平位置,AO=BO,不计杠杆重力,则G1、G2的关系为( )
A.无法判断 B.G1=G2 C.G1>G2 D.G1<G2
14.如图8所示,O为杠杆的支点,A点挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
15.如图9所示,重力不计的杠杆OA,O为支点,用力F提起重为30N的物体,恰在水平位置平衡。已知OA=80cm,AB=50cm,杠杆与转轴间摩擦忽略不计,下列说法中不正确的是( )
A.利用该机械提起重物时不能省功 B.拉力F的力臂为40cm
C.拉力F的大小为22.5N D.拉力F为作用在A点的最小动力
二.多选题(共3小题)
16.如图10是小明探究杠杆平衡条件的实验装置。已知轻质杠杆可绕支点O自由转动,杆上相邻刻度线之间的距离均相等,钩码质量均相同,杠杆在水平位置平衡,下列四个选项中,判断正确的是( )
A.实验前,发现杠杆静止时左端高于右端,为使杠杆在水平位置平衡,需把平衡螺母向右调节
B.将挂在A、B两处的钩码各去掉一个,则杠杆左端将下沉
C.将挂在A、B两处的钩码向支点O移近1格,则杠杆右端下沉
D.将B处的钩码去掉,在C处改用弹簧测力计,弹簧测力计只有竖直向上拉才能保持杠杆在水平位置平衡
17.如图11所示,在做“研究杠杆平衡条件”的实验时,以下说法中正确的是( )
A.不挂钩码时,若发现杠杆左端下沉,应将平衡螺母向右调
B.挂上钩码后,为使杠杆在水平位置重新平衡,可以再次调节平衡螺母
C.在A点挂上钩码后,为使杠杆在水平位置平衡,应在B点竖直向上施力
D.若将A点的钩码向左移动,为使杠杆水平位置保持平衡,在B点施加的力将变大
18.如图12所示,最近流行的“自拍神器”给旅行者自拍带来方便,下列说法不正确的是( )
A.手拿伸缩杆拍摄时,伸缩杆相当于一个省力杠杆
B.无线遥控器是通过红外线来控制手机拍摄的
C.杆柄表面用较粗糙材料制成,可增大手与杆柄的摩擦
D.当人站着自拍时,手机相当于一个平面镜
三.填空题(共10小题)
19.如图13所示,用固定在墙上的三角支架ABC放置空调室外机。如果A处螺钉松脱,则支架会绕 _点倾翻。已知AB长40cm,AC长30cm。室外机的重力为300N,正好处在AB中点处,则A处螺钉的水平拉力为 N(支架重力不计)。为了安全,室外机的位置应尽量 (选填“靠近”或“远离”)墙壁。
20.如图14甲所示,工人正试图用扳手拧松工件上一个紧固的螺母,尽管他使出了浑身力气,却没能成功。小明和小刚同学看到后,利用所学物理知识分别给他设计了一个新点子:小明设计的是在其它不变的情况下,取来一根绳子,将绳的一端系在扳手柄的上端,使劲拉绳的另一端,如图乙所示。小刚设计的是在其它不变的情况下,取来一个较长的套筒,将套筒套在扳手柄上,用力扳套筒的上端,如图丙所示。则:
(1)假如甲图和乙图工人都能把螺母拧下来,则拧下螺母所需要的最小力 (选填“甲大”或“乙大”或“一样大”);
(2)你会选择图 的方法来拧螺母,因为此种方法 ,所以更省力。
21.“暴走”是一种现今流行的运动方式。小明经过观察分析人的走路情形,发现可以将人的脚视为一个杠杆模型,如图15所示。行走时人的脚掌前端是支点,人体受到的重力是阻力,作用线过杠杆中点,小腿肌肉施加的力是动力。若小明的质量为60kg,则小明小腿肌肉产生的拉力约为 N;小明每向前走一步的过程中,重心升高约为4cm,则小明需克服自身重力约做功 J。
22.如图16中AOB是可绕O点无摩擦转动的轻质杠杆,A端挂重300N的重物,AO与BO的长度之比为5:4.人始终沿着竖直方向拉挂在B端的轻环。要使轻质杠杆水平平衡,则人应施加拉力大小为 N,要使人不被轻环拉起,则人重至少为 N.与水平平衡相比,当轻质杠杆在图中虚线位置平衡时,人的拉力将 (选填“变大”、“变小”或不变)。
23.如图17,由不同合金制成的黑、白两种实心球体积相等,黑、白两球的密度之比为3:5,此时杠杆水平平衡(不计杠杆、挂盘和细线的质量)。则m黑:m白= ,AO:OB= ;若在左边增加1个白球的同时,再在右边增加1个黑球,则杠杆 端下降(选填“左”或“右”)。
24.如图18所示,轻质杠杆OB可绕O点转动,OA=AB,物块G重30N,∠α=∠β=30°.在B点作用一个竖直向上的拉力F使杠杆在水平位置平衡,则F的大小为 N;保持杠杆在水平位置平衡,若仅将拉力F沿顺时针方向转动,则在转至虚线①所示位置的过程中,拉力大小将变 ,再转至虚线②所示位置静止时,拉力F大小为 N。
25.小明用如图19所示刻度、质量分布都均匀的杠杆探究杠杆平衡条件,实验前发现杠杆左端偏高,应向 (左/右)端调节平衡螺母,使杠杆在水平位置平衡。当杠杆水平平衡后,在左侧第2格上挂3个相同钩码(每个钩码重2N),则应在右侧第3格上用弹簧测力计竖直向下拉,使杠杆在水平位置平衡,则弹簧测力计示数应为 N.弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (增大/减小/不变)。
26.如图20,轻杆OA可绕O点自由转动,用细线将15N的重物挂在A处,小林在B处用竖直向上的拉力提住轻杆,OB和BA长度之比为3:5.下列问题中,轻杆始终在水平位置处于平衡。
(1)此杠杆类型与 (钓鱼竿/羊角锤)相同。
(2)拉力大小为 。
(3)若仅增加物重,则拉力的变化量与物重的变化量之比为 。
(4)若拉力方向变为图中虚线所示方向,则拉力将变 (大/小)。理由是 。
27.如图21所示,小明正在做俯卧撑,把他的身体看作一个杠杆,O为支点,A为重心,他的体重为450N.地面对手的支持力F的力臂是 m,大小为 N。
28.搬运砖头的独轮车的有关尺寸如图22所示,车箱和砖头总重G=1000N.推车时,人手向上的力F= N.
四.作图题(共4小题)
29.如图23所示。(1)画出拉力F1的力臂l1;
(2)画出重物G对杠杆的拉力F2的示意图,并画出F2的力臂l2。
30.如图24,画出使杠杆ABC平衡时的阻力F2和最小动力F1的示意图。
31.如图25所示是根据空调室外机(室外机和下面的支架为一个整体)建立的杠杆模型,请在图中画出并标明室外机受到重力的力臂l(以O点为支点)。
32.请用直尺和铅笔画出如图26所示杠杆的动力臂和阻力臂。
五.实验探究题(共3小题)
33.小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持 。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码(如图甲所示)为了使杠杆仍在水平位置平衡,他可以在B点处挂 个钩码或在B点用弹簧测力计拉杠杆。若采用弹簧测力计拉的方法,则弹簧测力计拉力的方向应竖直向 拉,竖直拉的目的是 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是: 。
34.在“探究杠杆的平衡条件”实验中,每个钩码重力相等(均为50g),杠杆刻度均匀(每格长为5cm)。
(1)平衡时,应该让杠杆静止在 位置。
(2)若在操作实验的过程中,出现如图甲所示情境时,杠杆左端或右端的平衡螺母应向 (选填“左”或“右”)。
(3)杠杆调节平衡后,实验数据记录在下表中:
次数
动力/N
动力臂/cm
阻力/N
阻力臂/cm
1
1
30
2
15
2
1.5
10
1
15
3
2
10
0.5
在处理实验数据时,发现少测量一个数据,你认为表中的空缺应为 cm。
(4)下列四个因素中,会带来实验误差的是 (正确选项可能有多项)
A.铁架台自身的重力足够大 B.杠杆的转动轴没有通过其中心
C.悬挂钩码的绳套重力偏大 D.杠杆与转轴之间的摩擦偏大
(5)在完成规定实验后,有一组同学继续进一步探究,如果杠杆受到F2、F3两个阻力,结论会怎样?通过实验,他们得到了如图乙、丙所示的结果。根据这个结果,可以初步得出,在这种情况下杠杆的平衡条件为:F1L1= 。(F1、F2、F3的力臂分别用L1、L2、L3表示)
35.小明利用刻度均匀的匀质杠杆做探究“杠杆的平衡条件”实验。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,如图甲所示。这时应将平衡螺母向 (选填“左”或“右”)端调节,直到杠杆在水平位置平衡,将杠杆调节水平平衡的目的是避免杠杆自重对实验的影响和便于 。
(2)如图乙所示,当杠杆水平平衡后,在左侧第2格挂3个相同的钩码,则应在右侧第3格上挂 个相同的钩码才能使杠杆水平平衡:若在左右两侧钩码的下方各增加1个钩码,则杠杆 (选填“能”或“不能”)保持平衡;若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”、“减小”或“不变”)。
(3)得出杠杆的平衡条件“动力×动力臂=阻力×阻力臂”后,小明又进一步探究杠杆平衡时动力和动力臂的关系。实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F1和动力臂L1的数据,并绘制了F1与L1的关系图象,如图丙所示。请根据图象推算,当L1为0.5m时,F1为 N。
六.解答题(共2小题)
36.如图是小明弯腰提起重物的情景,脊柱可绕骶骨(轴)O转动,腰背部肌肉对脊柱的拉力作用沿图中ab线,
①画出肌肉对脊柱的拉力F1,并画出这个力的力臂。
②肌肉对脊柱的拉力 绳子对手的拉力(选填“大于”、“等于”、“小于”),判断的依据是 。
37.图是人单手做俯卧撑时的简图,O为重心,O′为支点。手臂伸直时,地面对手的支持力沿直线ab。
(1)画出人所受的重力G。
(2)画出地面对手的支持力F。
(3)画出支持力的力臂L。
(4)根据公式 可判断G F(选填“大于”、“等于”或“小于”)
七.计算题(共3小题)
38.如图所示,某人用一根轻质木棒挑着重为120N的物体站在水平地面上,木棒保持水平,棒AB长为1.2m,重物悬挂处离肩膀距离BO为0.8m,
(1)则手在A端对木棒竖直向下的作用力大小为多少N?
(2)若人重为500N,双脚面积为40cm2,则该人在走路时对地面的压强为多少?
39.东营市借助国家“黄蓝”战略实现经济腾飞,如图所示是东营建设中常见的一种起重机的简化图,为了保证起重机吊起重物时不会翻到,在起重机右边配有一个重物m0;已知OA=12m,OB=4m。用它把质量为3×103kg,底面积为0.5m2、高为2m的长方体石墩G从空气中匀速放入水中某一位置,此时石墩完全浸没水中(g=10N/kg)。
(1)起吊前,石墩静止在水平地面时,它对地面的压强是多少?
(2)若石墩匀速从地面上吊起,起重机横梁始终保持水平,若起重机横梁自重不计,OA、OB的长度不变,右边的配重m0为多少千克?
(3)当石墩G从空中匀速浸没水中,若配重m0的位置、质量都不变,起重机始终保持水平,OA的长度如何变化?变化多少?
40.如图所示,轻质杠杆AB长1.2米,距支点O处0.2米的B端悬挂一个重力为3.6牛的铁球,A端处用细线沿竖直方向拉住杠杆保持水平平衡。求:
(1)细线对杠杆的A端的拉力。
(2)若在杠杆的适当位置处再悬挂一个重力为2牛的铜球,使细线剪断后杠杆仍能保持水平平衡,求铜球的悬挂点距O的距离。
沪科版物理八年级十章机械与人第一节 科学探究:杠杆的平衡条件
同步练习(综合练习)
参考答案与试题解析
一.选择题(共15小题)
G1LOA=G2LOB,
球的重力:
质量:G2=×G1=×600N=300N;
根据G=mg,球的质量:
m2===30kg。
故选:A。
【点评】本题考查了学生对杠杆的平衡条件的掌握和运用,估测出两力臂的大小关系是本题的突破口。
2.【分析】根据杠杆的平衡条件分析答题,杠杆平衡条件:动力×动力臂=阻力×阻力臂。
【解答】解:
A、由图可知:AB<BC;由杠杆平衡条件可得:G×AB=F1×BC,解得:F1=<G;
B、由图可知:AB>BC;由杠杆平衡条件可得:G×AB=F2×BC,解得:F2=>G;
C、由图可知:AC>BC;由杠杆平衡条件可得:G×AB=F3×AC,解得:F3=<G;
D、由图可知:AB<AC;由杠杆平衡条件可得:G×AC=F4×AB,解得:F4=>G;
由于杆长都相同,则比较B和D选项中的图可知:
B图中BC的长度与D图中AB的长度相等;B图中AB线段长度小于D图的AC线段长度,所以,F4>F2。
故选:D。
【点评】本题考查了杠杆平衡条件的应用,是一道基础题,应用杠杆平衡条件即可正确解题。
3.【分析】把水泥板看做一个杠杆,抬起一端,则另一端为支点。由于水泥板是一个厚度、密度都均匀的物体,所以,其重力的作用点在其中心上,此时动力F克服的是水泥板的重力,即此时的阻力臂等于动力臂的一半。在此基础上,利用杠杆的平衡条件,即可确定F甲与F乙的大小关系。
【解答】解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以两图中动力臂都是阻力臂的2倍。
因为FL动=GL阻,
所以,F==G,
所以,前后两次所用的力相同,即F甲=F乙,故ABC都错误,D正确;
故选:D。
【点评】本题考查了杠杆平衡条件的应用,对于均匀的物体,抬起一端所用的力等于其重力的一半,知道对于形状规则质地均匀的物体,其重心在其几何中心上是关键。
4.【分析】根据杠杆平衡的条件进行分析,即动力乘以动力臂等于阻力乘以阻力臂,由题意可知杠杆应始终处于平衡状态,则可得出拉力的变化。
【解答】解:由题意可知,在圆环转动中,A的位置保持不变,故杠杆始终处于平衡状态;
因为重力与重力的力臂的乘积不变,所以根据杠杆平衡的条件可得,动力与动力的力臂的乘积不变,且动力臂越大,动力会越小;又因为圆环在图示位置时,动力臂最大,动力最小,所以E环从C端移动到D端的过程中,动力会由大到小,再由小到大,故ABC错误,D正确。
故选:D。
【点评】本题的关键在于灵活应用杠杆平衡的平衡条件,并能根据动力的方向确定力臂的变化,会根据阻力、阻力臂和动力臂的关系判断动力的变化。
5.【分析】根据杠杆的平衡条件判断分析F的方向。
【解答】解:
使箱体从图中位置绕O点缓慢逆时针转至竖直位置时,箱子的重力不变,即阻力不变,由下面的示意图可知阻力臂会逐渐减小。
根据杠杆的平衡条件:F1L1=F2L2知,要使力F的大小保持不变,则动力臂也应该减小;
A、当F垂直于OA时,动力臂大小不变,故A不符合题意;
B、若F水平向左时,在逆时针转动过程中动力臂增大,故B不符合题意;
C、若F沿OA向上时,动力F的力臂为零,不能将箱体从图中位置绕O点缓慢逆时针转至竖直位置,故C不符合题意;
D、若F竖直向上时,阻力臂减小时,动力臂也减小,故D符合题意。
故选:D。
【点评】本题考查了学生对杠杆平衡条件的了解和掌握,判断力臂变化是本题的关键。
6.【分析】先分析杠杆两边力和力臂的变化,根据杠杆平衡的条件F1L1=F2L2对各个选项逐一分析即可。
【解答】解:A、在液体体积相同时,液体的密度越大,质量越大,因此只有每次倒入空桶的液体体积相同,才能通过杠杆平衡条件得出液体质量的大小,从而判断液体密度的情况,故A正确;
B、当A端的空桶内的液体密度越大时,根据杠杆平衡的条件可知,在M悬挂点处标出相应液体的密度值越大,故应将M向右移动,所以秤的刻度值向右越来越大。故B正确;
C、增大M的质量,根据杠杆平衡的条件F1L1=F2L2,秤的量程会增大,故C正确;
D、物体M悬挂点B到O点的距离为阻力臂,悬点O适当右移,阻力臂减小,根据杠杆平衡的条件F1L1=F2L2,可知秤的量程会减小,故D错误。
故选:D。
【点评】本题关键是正确运用杠杆的平衡条件,同时在处理方程的时候也要注意技巧。
7.【分析】由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小。所以要判断哪个动力最小,就看哪个动力对应的动力臂最长。支点与动力作用点之间的连线就是最长的动力臂,与这条动力臂垂直的力即为最小动力。
【解答】解:由图可知,O为轻质杠杆的支点,在B点挂重物,若在杠杆上施加一个拉力使杠杆水平平衡,则拉力的方向应向上,故F4不符合要求;
根据力臂的定义和图示可知,F1、F3对应的力臂都小于F2对应的力臂;
由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;因为F2对应的动力臂最长,所以F2最小,即符合要求且最小的力是F2。
故选:B。
【点评】本题考查杠杆平衡条件的应用,使用杠杆,当阻力和阻力臂一定时,动力臂越长越省力,找出最长的动力臂是本题的关键。
8.【分析】杆秤实际是以提纽为支点的杠杆,利用杠杆平衡条件分析力或力臂的变化。
【解答】解:由题意和图示可知,权、重分别为杠杆的动力和阻力,标、本分别为动力臂和阻力臂,根据杠杆平衡条件知,权×标=重×本。
A、“权”小于“重“时,由“权×标=重×本”知,“标”一定大于“本”,故A错误;
B、“权”小于“重”时,“本”是一定的,但“标”是可以改变的,所以A端不一定上扬,故B错误;
C、增大“重”时,“本”不变,由“权×标=重×本”知,可以增大“标”,或增大“权”,故C错误。
D、增大“重”时,“权”和“本”不变,由“权×标=重×本”知,“标”会增大,所以应把“权”向A端移,故D正确;
故选:D。
【点评】此题考查杠杆平衡的条件及获取信息的能力,使学生感悟中国古代科技的成就。
9.【分析】AB、以O为支点,由F1L1=F2L2可求出兄弟二人对杠杆支持力之比,由于压力和支持力是一对相互作用力,可知兄弟二人承担的压力之比;
C、以弟弟的肩B为支点,由F1L1=F2L2求出哥哥对杠杆的支持力;由于压力和支持力是一对相互作用力,可知哥哥承担的压力;
D、以哥哥的肩A为支点,由F1L1=F2L2可知弟弟对杠杆的支持力,由于压力和支持力是一对相互作用力,可知弟弟承担的压力。
【解答】解:
AB、以O为支点,由F1L1=F2L2可知,兄弟二人对杠杆支持力之比为:
====,
由于压力和支持力是一对相互作用力,因此兄弟二人承担的压力之比为4:5或5:4;故AB错误;
C、以弟弟的肩B为支点,由F1L1=F2L2可知,哥哥对杠杆的支持力:
F1′===500N;
由于压力和支持力是一对相互作用力,因此哥哥承担的压力为500N,故C错误;
D、以哥哥的肩A为支点,由F1L1=F2L2可知,弟弟对杠杆的支持力:
F1===400N;
由于压力和支持力是一对相互作用力,因此弟弟承担的压力为400N,故D正确;
故选:D。
【点评】本题考查了学生对杠杆平衡条件的理解和灵活运用及力的相互性,根据图示得出不同情况下已知力和力臂的大小是本题的解题关键。
10.【分析】(1)根据题意找到杠杆的五要素,即支点、动力、动力臂、阻力、阻力臂;
(2)杠杆的分类方法及特点:动力臂大于阻力臂的杠杆为省力杠杆(省力费距离);动力臂小于阻力臂的杠杆为费力杠杆(费里省距离);动力臂等于阻力臂的杠杆为等臂杠杆(不省力也不费距离)。
【解答】解:手是一个杠杆时,如图所示:
支点O在腕关节处,球压在掌心上的力是阻力F2,方向竖直向下,过支点作阻力F2 的垂线得到的线段即为阻力臂L2,前臂中的屈肌收缩产生的动力F1,方向水平向右,过支点作动力F1的垂线得到的线段即为动力臂L1,由图可知:阻力臂很明显大于动力臂。
所以是费力杠杆,费力杠杆的特点是:省距离。
故选:B。
【点评】解决本题的关键:一是根据题意找到杠杆的五要素,特别是找到动力臂和阻力臂,二是掌握杠杆的分类及其特点。
11.【分析】活塞式抽水机手柄可以看作是绕O点转动的杠杆,选项中的四个量应该分别代表了杠杆的动力、动力臂、阻力、阻力臂,关键是正确确定力臂大小,由杠杆的平衡条件即可解答。
【解答】解:读图可知,F1为动力,其力臂是支点到动力作用线的垂直距离,应为OE;F2为阻力,其力臂是从支点到阻力作用线的垂直距离,应为OB,所以根据杠杆的平衡条件,最终的平衡关系是F1?OE=F2?OB,只有选项D符合题意。
故选:D。
【点评】本题考查杠杆的平衡条件,关键是力臂的确定。
12.【分析】判定杠杆是否平衡关键是它是否满足杠杆的平衡条件:动力×动力臂=阻力×阻力臂。
【解答】解:设杠杆的分度值为 L,一个砝码的重为G.原来2G×4L=4G×2L;
A、左、右砝码各向支点移动一格,左边=2G×3L=6GL,右边=4G×L=4GL,左边>右边,杠杆向左端下沉,不符合题意。
B、左右各减少一个砝码,左边=G×4L=4GL,右边=3G×2L=6GL,左边<右边,杠杆向右下沉,不符合题意。
C、左、右砝码各减少一个,左边=G×4L=4GL,右边=2G×2L=4GL,左边=右边,杠杆平衡;符合题意。
D、左右各增加两个砝码,左边=4G×4L=16GL,右边=6G×2L=12GL,左边>右边,杠杆向左端下沉,不符合题意。
故选:C。
【点评】杠杆是否平衡取决于力和力臂的乘积是否相等,只比较力或力臂大小不能得出正确结果。
13.【分析】从题知,OA处于水平位置,GA对杠杆的拉力为竖直向下,所以G1对杠杆拉力的力臂即为杠杆AO的长度,G2对杠杆拉力的方向也是竖直向下,但OB不是处于水平,所以GB对杠杆拉力的力臂OB′小于OB的长度,根据杠杆的平衡条件分析,即可得出两个物体重力的大小。
【解答】解:根据杠杆的平衡条件:F1L1=F2L2可知,力与相应的力臂成反比关系,
它们的杠杆示意图如右,因为AO=BO,
所以LOA>LOB′,所以物体的重力G1<G2。
故选:D。
【点评】本题考查了学生对杠杆的平衡条件掌握和运用,能找到各自力的力臂、确定其大小关系是本题的关键。
14.【分析】由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小。所以要判断哪个动力最小,就看哪个动力对应的动力臂最长。支点与动力作用点之间的连线就是最长的动力臂,与这条动力臂垂直的力即为最小动力。
【解答】解:由图可知,O为支点,A点挂一重物,阻力方向向下,为使杠杆在水平位置平衡,在B点施加一个力,则动力F与杠杆垂直且方向向上,
要使该力最小,由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;
由图可知,BM对应的动力臂最长,所以该力应沿BM方向;
故选:A。
【点评】首先判断最小力的力臂,一般找支点和作用点之间的最长距离为最大力臂,在该点施加的力才最小。确定好最小的力,还要根据杠杆情况判断施力方向。
15.【分析】(1)根据功的原理可知:使用任何机械都不省功;
(2)画出动力臂,根据三角形的角边关系得出动力臂的大小;
(3)又知道阻力和阻力臂的大小;利用杠杆的平衡条件求动力的大小。
(4)根据杠杆平衡条件:动力×动力臂=阻力×阻力臂,在阻力×阻力臂一定的情况下,动力臂越大,动力将越小。判断出最小拉力的大小,
【解答】解:A、根据功的原理可知:使用任何机械都不省功;所以,利用该机械提起重物时不能省功,故A正确;
B、如图,在△ACO中,知道∠CAO=30°,则拉力F的力臂L=OC=OA=×80cm=40cm,故B正确;
C、重力的力臂为OB=OA﹣AB=80cm﹣50cm=30cm,G=30N,
根据杠杆平衡条件得:
F?OC=G?OB,
∴F===22.5N,故C正确;
D、在阻力×阻力臂一定的情况下,动力臂越大,动力将越小。由图示可知,当OA为动力臂时,作用在A点的动力最小,即力垂直于杠杆向上,故现在的拉力F不是最小作用力,故D错误。
故选:D。
【点评】本题考查了学生对杠杆平衡条件的掌握和利用,画出动力臂根据三角形的角边关系求出动力臂的大小是本题的突破口。
二.多选题(共3小题)
16.【分析】(1)调节杠杆两端的平衡螺母使杠杆在水平位置平衡。杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;同时也为了消除杠杆自重对杠杆平衡的影响;
(2)(3)用杠杆的平衡条件来判断,力和力臂乘积大的一端下沉;
(4)根据杠杆平衡条件,阻力和阻力臂不变时,弹簧测力计倾斜,动力臂变小,动力变大
【解答】解:A、挂钩码前,调节杠杆水平平衡时,发现杠杆静止时左端高于右端。要使杠杆在水平位置平衡,需把杠杆右端的平衡螺母向左移,故A错误;
B、设一个钩码的重力为G,杠杆一个小格代表L,
如果在图甲中杠杆两侧各去掉一个相同的钩码时,
杠杆的左端:3G×3L=9GL,
杠杆的右端:2G×4L=8GL,
所以杠杆的左端力和力臂的乘积大于右端的乘积,所以杠杆左端下沉。故B正确;
C、将图甲中挂在A、B两处的钩码向靠近支点O移近1格,
杠杆的左端:4G×2L=8GL,
杠杆的右端:3G×3L=9GL,
所以杠杆的左端力和力臂的乘积小于右端的乘积,所以杠杆右端下沉。故C正确;
D、弹簧测力计竖直向上拉杠杆时,拉力力臂为OC,弹簧测力计倾斜拉杠杆,拉力的力臂小于OC,拉力力臂变小,拉力变大,弹簧测力计示数变大;弹簧测力计不在竖直向上方向拉也能保持杠杆在水平位置平衡,故D错误。
故选:BC。
【点评】杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此在此实验中我们应首先调节杠杆在水平位置平衡,减小了杠杆的自重对实验的影响,便于测量力臂
17.【分析】(1)杠杆左端下沉,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移;
(2)挂上钩码后,为使杠杆在水平位置重新平衡,不能再次调节平衡螺母;
(3)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂;
(4)根据杠杆的平衡条件分析解答。
【解答】解:A、杠杆的左端下沉,说明这一侧力与力臂的乘积大,应将平衡螺母向右调节,故A正确;
B、挂上钩码后,为使杠杆在水平位置重新平衡,不能再次调节平衡螺母,故B错误;
C、在A点挂上钩码后,力与力臂的乘积产生的效果是逆时针转动,在B点施加的力与力臂的乘积产生的效果是顺时针转动,杠杆才能保持平衡,故B点力的方向应竖直向下,故C错误;
D、将A点的钩码向左移动,阻力臂变大,在阻力、动力臂不变的情况下,为使杠杆水平位置保持平衡,在B点施加的力将变大,故D正确。
故选:AD。
【点评】本题研究“杠杆平衡条件”,考查器材的调试、杠杆平衡条件的运用、力臂的理解。
18.【分析】(1)结合图片和生活经验,先判断杠杆在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆。
(2)家庭用无线遥控器大多是通过红外线来控制的。
(3)增大摩擦力的方法:①增大压力,②增大接触面的粗糙程度;
(4)“自拍神器”是利用凸透镜成倒立、缩小的实像工作的。
【解答】解:
A、在使用伸缩杆照相时,动力臂小于阻力臂,属于费力杠杆,故A错;
B、无线遥控器是通过红外线来控制的,故B正确;
C、杆柄表面用较粗糙材料制成,是通过增大接触面的粗糙程度来增大摩擦力,故C正确;
D、当人站着自拍时,手机相当于一个凸透镜,成倒立、缩小的实像,故D错。
故选:AD。
【点评】此题主要考查了有关凸透镜成像的规律及应用、判断杠杆的类型、增大摩擦的方法等多个知识点,是一道综合性较强的题目。
三.填空题(共10小题)
19.【分析】(1)三角支架ABC可看作杠杆,如果A处螺钉松脱,则支架会绕C点倾翻;
(2)分析杠杆五要素,根据杠杆的平衡条件求出A处螺钉的水平拉力;
根据杠杆的平衡条件,分析不变的量和可变的量,得出要减小水平拉力F的措施。
【解答】解:
(1)用固定在墙上的三角支架ABC放置空调室外机。如果A处螺钉松脱,则支架会绕C点倾翻;
(2)C点是支点,空调受到重力而作用在支架上的力是阻力,由杠杆平衡条件可知:F×AC=G×AB;
A处螺钉的水平拉力为:
F=×G﹣﹣﹣﹣﹣﹣﹣①。
代入已知量得:
F=×300N=200N;
为了安全,即减小水平拉力F;由①知,在AC、G不变的前提下,要减小AB,故A处螺钉的水平拉力室外机的位置应尽量靠近墙壁。
故答案为:C;200;靠近。
【点评】此题考查了杠杆平衡条件的应用,关键是将实际问题转化为杠杆问题,体现了物理知识与生活的紧密联系。
20.【分析】(1)甲乙两图中,阻力和阻力臂一定,动力不变,施加的动力的方向不变,动力臂不变,只是改变了作用点,不能省力,
(2)使用轮轴时,轮半径是轴半径的几倍,作用轮上的力就是轴上力的几分之一。
【解答】解:(1)图乙和图甲比较,前后两种做法力臂没有改变,因为阻力和阻力臂不变,根据杠杆的平衡条件得出不能省力,因此拧下螺母所需要的最小力是一样大的;
(2)图丙中用了一个较长的套筒套在扳手柄上,相当于加长了轮半径,因此会更省力,应选择图丙的方法来拧螺母,因为此种方法动力臂更长,所以更省力。
故答案为:(1)一样大;(2)丙;动力臂更长。
【点评】此题主要考查了轮轴的省力情况与轮半径之间的关系,与生活实际相联系,更具有实际意义。
21.【分析】(1)根据杠杆的平衡条件分析解答小腿肌肉对脚的拉力;
(2)小明踮脚过程中克服重力做功等于踮脚一次所做的功;
【解答】解:
(1)小明的重力G=mg=60kg×10N/kg=600N,
由图知,由于重力作用线过杠杆中点,且拉力的方向竖直向上,则拉力F的力臂L1=2L2;
根据杠杆的平衡条件可得:FL1=GL2,
则小腿肌肉对脚的拉力:F===300N;
(2)每向前走一步的过程中,小明克服自身重力做的功:W=Gh=600N×0.04m=24J。
故答案为:300;24。
【点评】本题考查了杠杆的平衡条件、功的计算,其中小明踮脚过程中克服重力做功W=Gh。
22.【分析】(1)杠杆在水平位置平衡,知道动力臂和阻力臂的关系,以及在A点施加大小,利用杠杆的平衡条件F1L1=F2L2计算出杠杆B点人应施加拉力。人要不被拉起,则人重至少等于人应施加拉力;
(2)当轻杆在图中虚线位置平衡时,两力臂的比值不变,物体的重力不变,根据杠杆的平衡条件可知人的拉力大小。
【解答】解:
(1)由题知,AO:OB=5:4,G=300N,
要使轻杆水平平衡,根据杠杆平衡条件可得:G×OA=F×OB,
则拉力大小F===375N,
人要不被拉起,则人重至少等于人应施加拉力,即人重至少为375N;
(2)当轻杆在图中虚线位置平衡时,与水平平衡相比,倾斜后力臂都变小,但由相似三角形的知识可知,两力臂的比值不变,仍为5:4,且物体的重力不变,根据杠杆的平衡条件可知人的拉力不变,仍为375N。
故答案为:375;375;不变。
【点评】杠杆在水平位置平衡后,支点到力的作用线的距离就是力臂,这点是考查的重点,也是学生容易忽视的地方。
23.【分析】(1)根据m=ρV,在体积相等时,质量与密度成正比;
(2)根据杠杆的平衡条件结合黑、白两球的质量之比求左右两边的力臂之比;
(3)若在左边增加1个白球的同时,再在右边增加1个黑球,根据左右两边力与力臂积大小确定哪端下降。
【解答】解:
(1)根据m=ρV可知,在体积相等时,质量与密度成正比,
黑、白两种球的密度之比为ρ黑:ρ白=3:5,则黑、白两球的质量之比为3:5;
(2)因黑、白两球的质量之比为3:5,则可设黑球的质量为3m,白球的质量为5m,
设杠杆左边的力臂为L1,右边的力臂为L2,
根据图示和杠杆平衡条件可得:(3m×2+5m)g×L1=(3m+5m×2)g×L2,
化简可得左右两边的力臂之比为L1:L2=13:11;
则:
AO:OB=L1:L2=13:11;
(3)若在左边增加1个白球的同时,再在右边增加1个黑球,则两边力与力臂之积分别为:
左边:(3m×2+5m×2)g×L1=16mgL1,
右边:(3m×2+5m×2)g×L2=16mgL2,
因L1:L2=13:11;
所以,比较可知,左边力与力臂之积大于右边力与力臂之积,
故杠杆左端将下沉。
故答案为:3:5; 13:11;左。
【点评】本题考查密度公式和杠杆平衡条件的运用。当左边力与力臂之积等于右边力与力臂之积时,杠杆平衡;当左边力与力臂之积大于右边力与力臂之积,左端下沉。
24.【分析】从支点向力的作用线作垂线,垂线段的长度即力臂。根据杠杆平衡条件动力×动力力臂=阻力×阻力力臂求出F,分析力臂变化可知力的变化。
【解答】解:
(1)因为OA=AB,则OB=2OA;
由杠杆平衡条件得:F×OB=G×OA,
所以,F===15N,
(2)保持杠杆在水平位置平衡,将拉力F沿顺时针方向转动,在转至①位置时,拉力的力臂变小,因为阻力与阻力臂不变,由杠杆的平衡条件可知,拉力变大;
(3)保持杠杆在水平位置平衡,将拉力F沿顺时针方向转动,在转至②位置时,由于∠β=30°,由直角三角形的知识可知,动力F的力臂OD=OB,
由杠杆平衡条件得:F′×OD=G×OA,
即:F′×OB=G×OB,
所以此时的拉力F′=G=30N。
故答案为:15;变大;30。
【点评】考查杠杆平衡条件的应用,利用平衡条件公式,分析力臂变化可知力的变化,注意灵活运用。
25.【分析】(1)杠杆倾斜时,杠杆的重心偏向杠杆下沉的一端,左、右两端的螺母(或一端的螺母)要向杠杆上翘的一端调节。
(2)根据题意确定动力臂的大小,根据杠杆平衡条件分析求解;
(3)分析测力计由竖直方向逐渐向左转动时力臂的变化,根据杠杆的平衡条件分析。
【解答】解:(1)实验前杠杆左端偏高左侧高,右端低,根据杠杆的平衡条件可知,应向左调节平衡螺母,
(2)设杠杆的一个小格为L,因在右侧第3格上用弹簧测力计竖直向下拉,根据力臂的定义,动力臂为3L,根据根据杠杆平衡条件F1L1=F2L2,即F×3L=3×2N×2L,则弹簧测力计示数F=4N;
(3)弹簧测力计在竖直方向向下拉时,动力臂OB,如下所示:
由竖直方向逐渐向左转动,阻力、阻力臂不变,动力臂为直角三角形OBA的直角边OA,
根据数学知识,直角边OA小于斜边OB,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大。
故答案为:左;4;增大。
【点评】本题探究杠杆平衡条件的,掌握器材的调试、杠杆的平衡条件的运用。是解题的关键。
26.【分析】(1)当动力臂小于阻力臂时,动力大于阻力,杠杆是费力力杠杆;
(2)根据杠杆平衡的条件F1L1=F2L2可直接求出动力F1的大小;
(3)若仅增加物重,根据杠杆平衡的条件F1L1=F2L2可直接求出;
(4)若拉力方向变为图中虚线所示方向,阻力的力臂不变,拉力的力臂变小,根据杠杆的平衡条件可知拉力的变化。
【解答】解:由图可知,O点为支点,在B点的拉力为动力,阻力大小等于所挂物体的重力,则OB为动力臂,OA为阻力臂;
(1)由图可知,OB小于OA,即动力臂小于阻力臂,所以是费力杠杆;钓鱼竿就是此杠杆类型;
(2)已知OB和BA长度之比为3:5,则OB:OA=3:8,
由杠杆的平衡条件可知:F?OB=G?OA,
所以,F=?G=×15N=40N;
(3)若仅增加物重,则F2=G+△G,设拉力的变化量为△F,则此时的拉力F1=F+△F;
由杠杆的平衡条件可知:F1?OB=F2?OA,
即:(F+△F)?OB=(G+△G)?OA,
所以,F?OB+△F?OB=G?OA+△G?OA,
由于F?OB=G?OA,
所以,△F?OB=△G?OA,则==;
(4)若拉力方向变为图中虚线所示方向,阻力及阻力臂不变,拉力的力臂变小,由杠杆的平衡条件F1L1=F2L2可知拉力将变大。
故答案为:(1)钓鱼竿;(2)40N;(3)8:3;(4)大;拉力的力臂减小。
【点评】此题结合实例考查了对杠杆的平衡条件的理解与应用,会通过计算比较动力和阻力的大小,从而判断是什么类型的杠杆。
27.【分析】(1)力臂是指从支点到力的作用线的垂直距离,根据图示确定动力臂和阻力臂的长度;
(2)已知重力、动力臂和阻力臂,根据杠杆平衡的条件进行计算。
【解答】解:
(1)由图可知,支点到支持力作用线的垂线段为动力臂,即动力臂L1=0.9m+0.6m=1.5m,
(2)支点到重力作用线的垂线段为阻力臂,即阻力臂L2=0.9m;
根据杠杆平衡的条件可得:FL1=GL2,
即:F×1.5m=450N×0.9m,
解得F=270N。
故答案为:1.5;270。
【点评】本题考查了学生对杠杆的平衡条件的掌握和运用,关键是从图中找出动力臂和阻力臂。
28.【分析】找出支点,弄清楚动力臂和阻力臂,根据杠杆的平衡条件F1L1=F2L2可以求出作用在车把上竖直向上的力的大小。
【解答】解:由图可知,支点在轮的轴处,动力臂为0.3m+0.7m=1m,阻力臂为0.3m,由FL1=GL2可得,F×1m=1000N×0.3m,解得F=300N。
故答案为:300。
【点评】此题主要考查的是杠杆平衡条件的应用,属于中考的常见题型,难度不大。
四.作图题(共4小题)
29.【分析】(1)力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
(2)确定重物G对杠杆的拉力的作用点和方向,根据力的示意图的画法画出即可。
【解答】解:(1)由图可知,杠杆的支点为O,反向延长拉力F1画出力的作用线,然后过支点O做拉力F1的垂线段,即为其力臂L1;
(2)重物G对杠杆的拉力F2的作用点在杠杆上,方向竖直向下;过支点O作F2的作用线的垂线段,即为力臂L2;如图所示:
【点评】此类题的关键是掌握杠杆五要素,然后根据杠杆的五要素作出相应的作用力或力臂,并且作图要求规范。
30.【分析】根据杠杆平衡的条件,F1×L1=F2×L2,在杠杆中的阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长。而在通常情况下,连接杠杆中支点和动力作用点这两点所得到的线段最长,物体的重力即为阻碍杠杆转动的力,即阻力F2,方向竖直向下。
【解答】解:①连接OC就是最长的动力臂,根据杠杆平衡的条件,要使杠杆平衡动力方向向上,据此可画出最小的动力;
②B为阻力作用点,阻力F2的方向竖直向下;如下图所示:
【点评】做出杠杆中的最小动力,可以按照以下几个步骤进行:
1、确定杠杆中的支点和动力作用点的位置;
2、连接支点与动力作用点,得到最长的线段;
3、经过动力作用点做出与该线段垂直的直线;
4、根据杠杆平衡原理,确定出使杠杆平衡的动力方向。
31.【分析】力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。
②确定力的作用点和力的方向,画出力的作用线。
③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
【解答】解:延长重力G画出力的作用线,然后从支点O向力的作用线作垂线,支点到垂足的距离就是重力的力臂L.如图所示:
【点评】画杠杆的力臂一是要找准支点,二是要准确画出力的作用线,然后才是从支点作力的作用线的垂线,最后还应该用字母将其标出来。
32.【分析】已知支点、动力和阻力的方向,根据力臂的画法,过支点作动力作用线和阻力作用线的垂线段,即动力臂和阻力臂。
【解答】解:分别反向延长动力F1和阻力F2的作用线,然后分别过支点O作力F1和F2作用线的垂线段,即为动力臂和阻力臂L1、L2;如图所示:
【点评】力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
五.实验探究题(共3小题)
33.【分析】(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,说明杠杆的重心在支点的右侧,据此确定平衡螺母调节的方向;
杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;杠杆的重心过支点,消除杠杆重对杠杆平衡的影响;
(2)知道动力臂、阻力、阻力臂,根据杠杆平衡条件F1L1=F2L2求出动力,求出钩码的数量;
探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(3)杠杆的重心不通过支点,则其重力会对杠杆的平衡造成影响。
【解答】解:
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,说明杠杆的重心在支点的右侧,此时,应把杠杆两端的平衡螺母向左调节,使杠杆在不挂钩码时,保持在水平位置平衡;
(2)设杠杆的一个小格为L,一个钩码的重力为G,
甲图,由杠杆平衡条件得,4G×3L=nG×2L,
所以n=6(个),所以应在杠杆右边B处挂6个钩码。
杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,若采用弹簧测力计拉的方法,则弹簧测力计拉力的方向最好为竖直向下,根据力臂的定义,力的作用点与支点的距离等于动力臂的大小,其目的是便于测量力臂;
(3)用如图乙所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响。
故答案为:(1)左;水平位置平衡;(2)6;下;便于测量力臂;(3)杠杆的自重对杠杆平衡有影响。
【点评】此题是探究杠杆平衡条件,考查杠杆的调试、平衡条件的运用、实验的操作、力臂的概念等知识。
34.【分析】(1)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂(重力的方向跟杠杆垂直),同时能够消除杠杆自身重力对杠杆平衡的影响,因此在此实验中我们应首先调节杠杆在水平位置平衡;
(2)调节杠杆平衡的原则是杠杆左倾向右调节螺母,螺母的调节方向是向上翘的那端调节。
(3)已知此题中的动力和动力臂不变,据杠杆的平衡条件分析即可解决;
(4)对各选项分析解答;
(5)无论两侧挂几组钩码,每一组都有自己的力与力臂,因此,求出每一个力与相应力臂的乘积,再相加,就是整个这一侧的结果,同样表示出另一侧,看两者是否平衡。
【解答】解:(1)为了便于从杠杆上直接读取力臂,在进行实验时应该使杠杆在水平位置平衡;
(2)杠杆不在水平位置,右端偏低,则重心应向左移动,故应向左调节左端或右端的平衡螺母。
(3)根据F1L1=F2L2可知,2N×10cm=0.5N×L2,
解得L2=40cm;
(4)A.铁架台自身的重力足够大目的使杠杆稳定,但对杠杆的平衡无影响,故A不符合题意;
B.杠杆的转动轴没有通过其中心,对实验结果有影响,故B符合题意;
C.悬挂钩码的绳套重力偏大,会对力的真实值有影响,故C符合题意;
D.杠杆与转轴之间的摩擦偏大会影响杠杆的灵敏,对测量结果造成误差,故D符合题意。
故选BCD。
(5)设一个钩码的重力为G,杠杆一个格的长度为L,根据杠杆平衡条件可知,杠杆右侧F3L3+F2L2=2G×2L+2G×4L=12GL;杠杆左侧F1L1=4G×3L=12GL,故左侧等于右侧,故F3L3+F2L2=F1L1。
故答案为:(1)水平;(2)左;(3)40;(4)BCD;(5)F3L3+F2L2。
【点评】本题主要考查对“探究杠杆平衡条件”的实验内容的了解,是一道中等题。
35.【分析】(1)调节杠杆平衡时,应将平衡螺母向上翘的一端移动;实验中调节杠杆在水平位置平衡,力与杠杆垂直,并便于测量力臂;
(2)根据杠杆平衡条件,判断在右侧第3格上挂几个钩码;根据该杠杆的平衡条件判断;
弹簧测力计竖直向下拉杠杆时,力臂在杠杆上,当弹簧测力计倾斜拉杠杆时,力臂变短,阻力、阻力臂不变,动力臂变短,动力变大。
(3)由找到力与对应的力臂的值,由杠杆的平衡条件求解
【解答】解:(1)杠杆右端下沉,应将平衡螺母向左端移动,使其在水平位置平衡目的是为了便于测量力臂;
(2)设一个钩码的重力为G,杠杆的一个小格为L,
根据杠杆平衡条件得:3G×2L=2G×3L,
所以,应在右侧第3格上挂2个钩码。
平衡后,在两边钩码的下方再各增加一个和上面同样的钩码,左边:
(3+1)G×2L=8GL,
右边:(2+1)G×3L=9GL,不满足F1L1=F2L2,
则杠杆不能保持平衡。
若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动时,阻力、阻力臂不变,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大;
(3)由图可知,当F1=3N时,L1=0.2m;
由于此题中的阻力和阻力臂不变,根据F1L1=F2L2可知,
利用图象中任意一组数据都能得出,F2L2=F1L1=0.2m×3N=0.6N?m;
所以,若当L1为0.5m时,
F1===1.2N。
故答案为:(1)左;测量力臂;(2)2;不能;增大;(3)1.2。
【点评】本题探究杠杆平衡条件,考查杠杆平衡条件的运用、对力臂的理解及从图中获取信息的能力。
六.解答题(共2小题)
36.【分析】①分析出肌肉对脊柱的拉力的作用点和方向后,按照力的示意图的画法画出拉力示意图;
已知支点位置,从支点向拉力的作用线引垂线段,就是拉力的力臂;
②根据杠杆平衡条件判断肌肉对脊柱的拉力和绳子对手的拉力的大小关系。
【解答】解:
①腰背部肌肉对脊柱的拉力作用沿图中ab线,作用点在脊柱上,物体向下的拉力使脊柱顺时针转动,则背部肌肉产生拉力应让脊柱逆时针转动,所以方向向左,由此画出这个力F1;
由题知,O为支点,从O点作拉力F1作用线的垂线段,即这个力的力臂。如图所示:
②画出绳子对手拉力的力臂L2,由图知L1<L2,根据杠杆平衡条件可知,肌肉对脊柱的拉力大于绳子对手的拉力。
故答案为:①见上图;②大于;杠杆平衡条件。
【点评】此题考查的是力的示意图的作法和杠杆力臂作法,杠杆平衡条件的应用,是基本技能和规律的考查,要掌握好。
37.【分析】(1)(2)确定重力和支持力的作用点和方向,然后按照力的示意图的画法画出重力和支持力的示意图;
(2)力臂是指从支点到力的作用线的距离;力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
(4)根据杠杆平衡条件,结合图示分析G和F的大小关系。
【解答】解:(1)人所受的重力的作用点在重心O上,方向竖直向下,过点O,沿竖直向下的方向画一条有向线段,用G表示,即为重力示意图;如图所示:
(2)地面对手的支持力的作用点在手上,方向垂直于地面向上,过支持力的作用点,沿垂直于地面向上的方向画一条有向线段,用F表示,即为地面对手的支持力;如图所示:
(3)由图可知,支点为O′,过支点作支持力作用线的垂线段,即为支持力的力臂L1.如图所示:
(4)把人看做一个杠杆,人此时在重力和支持力的作用下保持平衡状态,根据杠杆平衡条件:动力×动力臂=阻力×阻力臂(FL1=GL2)可知,此时动力臂L1大于阻力臂L2,所以G大于F。
故答案为:(1)(2)(3)见解答图;(4)FL1=GL2;大于。
【点评】此题考查力的示意图、力臂的画法、同时考查杠杆平衡条件的应用,是一道综合性很强的题目,要求学生数量掌握相关作图方法和物理知识。
七.计算题(共3小题)
38.【分析】(1)木棒以人肩作为支点,并在水平位置处于平衡状态,利用杠杆的平衡条件F1L1=F2L2可求得手对木棒的作用力。
(2)分析人对地面的压力和受力面积大小,由压强公式p=求解。
【解答】解:(1)肩膀是支点,木棒保持水平,手在A端对木棒竖直向下的作用力为动力,根据力臂的定义,OA为动力臂,OB为阻力臂,由杠杆平衡条件可得:
F×OA=G×OB,即:F×(AB﹣OB)=G×OB,
F×(1.2m﹣0.8m)=120N×0.8m,
解得,手在A端对木棒施加的力:F=240N;
(3)人重为500N,用一根轻质木棒(重力可不计)挑着重为120N的物体站在水平地面上,则对地面的压力:
F′=500N+120N=620N,
双脚面积为40cm2,人在走路时与地面的接触面积S=×40cm2=20cm2,即受力面积,
对地面的压强:
p===3.1×105Pa;
答:(1)则手在A端对木棒竖直向下的作用力大小为240N;
(2)若人重为500N,双脚面积为40cm2,则该人在走路时对地面的压强为3.1×105Pa。
【点评】本题考查杠杆平衡条件、压强的计算,关键是找出杠杆的五要素和受力面积的确认。
39.【分析】(1)在水平地面上物体的压力和自身的重力相等,根据G=mg求出其大小,然后根据公式p=求出起吊前它对地面的压强;
(2)以O作为支点,将物重和配重分别看作动力和阻力,已知两力臂OA、OB的长,根据杠杆的平衡条件列式求解即可。
(3)石墩G从空气中匀速浸没水中的过程中,受到的浮力逐渐变大,根据杠杆的平衡条件可求OA的长度,即可求变化多少。
【解答】解:(1)石墩的重力:
G=mg=3×103kg×10N/kg=3×104 N,
石墩静止在水平地面时,它对地面的压强:
P===6×104Pa;
(2)石墩匀速从地面上吊起,所以FA=G═3×104 N,
根据杠杆平衡条件可得FA?AO=FB?BO,
所以FB===9×104 N,
配重的质量:mo===9×103kg,
(3)石墩G从空气中匀速浸没水中的过程中,受到的浮力逐渐变大,
最大浮力为F浮=ρV排g=1×103kg/m3×0.5m2×2m×10N/kg=104N,
则拉力FA最小为FA实=G﹣F浮=3×104 N﹣104N=2×104 N,
此时AO的长度应为:
AO′===18m,
AO变为AO′,变长了18m﹣12m=6m。
答:(1)起吊前,石墩静止在水平地面时,它对地面的压强是6×104Pa;
(2)若石墩匀速从地面上吊起,起重机横梁始终保持水平,若起重机横梁自重不计,OA、OB的长度不变,右边的配重m0为9×103kg;
(3)当石墩G从空中匀速浸没水中,若配重m0的位置、质量都不变,起重机始终保持水平,OA的长度变长,变化了6m。
【点评】本题考查压强、拉力、时间、浮力以及杠杆的计算,关键是公式及其变形的灵活应用,重点知道在水平地面上压力等于物体自身重力和杠杆平衡条件的应用。
40.【分析】(1)细线对杠杆的A端的拉力即作用在杠杆的动力F1,由已知条件,根据杠杆的平衡条件求解;
(2)细线剪断后杠杆仍能保持水平平衡,故铜球的悬挂点在O点左侧,由已知条件,根据杠杆的平衡条件求铜球的悬挂点距O的距离。
【解答】解:(1)细线对杠杆的A端的拉力即作用在杠杆的动力F1,根据杠杆的平衡条件
F1×OA=G×OB,
作用在杠杆的动力:
F1=×G=×3.6N=0.72N;
(2)铜球的悬挂点距O的距离为0.36米。
【点评】本题考查杠杆平衡条件的运用,难度不大。
同步练习(综合练习)
一.选择题(共15小题)
1.600N的人站在跷跷板某一位置时,跷跷板处于如图1所示的平衡状态。由此可估测球的质量约为( )
A.30kg B.20 kg C.60kg D.120N
2.如图2所示的四个杠杆,悬挂的重物G和杆长都相同。若各杠杆均处于平衡状态,则所用的最大的力是( )
3.一块厚度、密度均匀的长方形水泥板平放在水平地面上,现分别用竖直向上的力F甲和F乙作用在不同的位置(如图甲、乙所示),将其一端缓缓抬离地面,则下列说法正确的是( )
A.F甲>F乙,因为甲图中的动力臂长
B.F甲<F乙,因为乙图中的阻力臂长
C.F甲>F乙,因为乙图中时阻力臂短
D.F甲=F乙,因为两图中动力臂都是阻力臂的2倍
4.如图所示,在杠杆OA上的B点悬挂一重物G,A端用细绳吊在小圆环E上,小圆环E在圆弧CD上可以自由滑动,且细绳AE长等于圆弧CD的半径,此时杠杆恰好成水平状态,A点与圆弧CED的圆心重合。E环从C点沿顺时针方向逐渐滑到D点的过程中,下列说法正确的是( )
A.吊绳对A端的作用力大小将由小变大,再由大变小
B.吊绳对A端的作用力大小将保持不变
C.吊绳对A端的作用力大小与其力臂的乘积将由大变小,再由小变大
D.吊绳对A端的作用力大小与其力臂的乘积将保持不变
5.如图,O为拉杆式旅行箱的轮轴,OA为拉杆。现在拉杆端点A处施加力F,使箱体从图中位置绕O点缓慢逆时针转至竖直位置。若力F的大小保持不变,则力F的方向应( )
A.垂直于OA B.水平向左 C.沿OA向上 D.竖直向上
6.如图,小明用一轻质杠杆自制简易密度秤的过程中,在A端的空桶内分别注入密度已知的不同液体,改变物体M悬挂点B的位置,当杠杆在水平位置平衡时,在M悬挂点处标出相应液体的密度值。下列关于密度秤制作的说法中,错误的是( )
A.每次倒入空桶的液体体积相同
B.秤的刻度值向右越来越大
C.增大M的质量,秤的量程会增大
D.悬点O适当右移,秤的量程会增大
7.图中,O为轻质杠杆的支点,在B点挂重物,若在杠杆上施加一个拉力使杠杆水平平衡,则图中拟施加的四个力中,符合要求且最小的是( )
A.F1 B.F2
C.F3 D.F4
8.《墨经》最早记述了秤的杠杆原理,如图中“标”“本”表示力臂,“权”“重”表示力,以下说法符合杠杆平衡原理的是( )
A.“权”小于“重”时,“标”一定小于“本”
B.“权”小于“重”时,A端一定上扬
C.增大“重”时,应更换更小的“权”
D.增大“重”时,应把“权”向A端移
9.身高相同的兄弟二人,用一根重力不计的均匀扁担抬起一个900N的重物。已知扁担长为1.8m,重物悬挂点与哥哥的肩之间的距离OA=0.8m,如图3所示。则( )
A.以O为支点,可计算出兄弟二人承担的压力之比为4:9
B.以O为支点,可计算出兄弟二人承担的压力之比为9:5
C.以弟弟的肩B为支点,可计算出哥哥承担的压力为600 N
D.以哥哥的肩A为支点,可计算出弟弟承担的压力为400 N
10.当你用手掌托住一只铁球并绕腕关节向上转动时,手就是一个杠杆、球压在掌心上的力是阻力,腕关节是支点,通过前臂中的伸、屈肌的伸、缩产生动力,使托住球的手向上转动(如图4)。那么,人体上的这个杠杆应该是( )
A.省力杠杆 B.费力杠杆
C.既省力又省距离的杠杆 D.既不省力也不省距离的杠杆
11.如图5所示,活塞式抽水机手柄可以看作是绕O点转动的杠杆,它在动力F1和阻力F2的作用下,处于平衡状态,则( )
A.F1?OC=F2?OA B.F1?OD=F2?OB C.F1?OE=F2?OA D.F1?OE=F2?OB
12.如图6所示,杠杆挂上砝码后刚好平衡,每个砝码的质量相同,在下列情况中,杠杆还能保持平衡的是( )
A.左右砝码各向支点移一格 B.左右各减少一个砝码
C.左右各减少一半砝码 D.左右各增加两个砝码
13.如图7所示,杠杆AOB用细线悬挂起来,分别在A、B两端挂上重为G1、G2的物体时,杠杆平衡,此时AO恰好处于水平位置,AO=BO,不计杠杆重力,则G1、G2的关系为( )
A.无法判断 B.G1=G2 C.G1>G2 D.G1<G2
14.如图8所示,O为杠杆的支点,A点挂一重物,为使杠杆在水平位置平衡,若在B点施加一个力并使该力最小,该力应沿( )
A.BM方向 B.BN方向 C.BP方向 D.BQ方向
15.如图9所示,重力不计的杠杆OA,O为支点,用力F提起重为30N的物体,恰在水平位置平衡。已知OA=80cm,AB=50cm,杠杆与转轴间摩擦忽略不计,下列说法中不正确的是( )
A.利用该机械提起重物时不能省功 B.拉力F的力臂为40cm
C.拉力F的大小为22.5N D.拉力F为作用在A点的最小动力
二.多选题(共3小题)
16.如图10是小明探究杠杆平衡条件的实验装置。已知轻质杠杆可绕支点O自由转动,杆上相邻刻度线之间的距离均相等,钩码质量均相同,杠杆在水平位置平衡,下列四个选项中,判断正确的是( )
A.实验前,发现杠杆静止时左端高于右端,为使杠杆在水平位置平衡,需把平衡螺母向右调节
B.将挂在A、B两处的钩码各去掉一个,则杠杆左端将下沉
C.将挂在A、B两处的钩码向支点O移近1格,则杠杆右端下沉
D.将B处的钩码去掉,在C处改用弹簧测力计,弹簧测力计只有竖直向上拉才能保持杠杆在水平位置平衡
17.如图11所示,在做“研究杠杆平衡条件”的实验时,以下说法中正确的是( )
A.不挂钩码时,若发现杠杆左端下沉,应将平衡螺母向右调
B.挂上钩码后,为使杠杆在水平位置重新平衡,可以再次调节平衡螺母
C.在A点挂上钩码后,为使杠杆在水平位置平衡,应在B点竖直向上施力
D.若将A点的钩码向左移动,为使杠杆水平位置保持平衡,在B点施加的力将变大
18.如图12所示,最近流行的“自拍神器”给旅行者自拍带来方便,下列说法不正确的是( )
A.手拿伸缩杆拍摄时,伸缩杆相当于一个省力杠杆
B.无线遥控器是通过红外线来控制手机拍摄的
C.杆柄表面用较粗糙材料制成,可增大手与杆柄的摩擦
D.当人站着自拍时,手机相当于一个平面镜
三.填空题(共10小题)
19.如图13所示,用固定在墙上的三角支架ABC放置空调室外机。如果A处螺钉松脱,则支架会绕 _点倾翻。已知AB长40cm,AC长30cm。室外机的重力为300N,正好处在AB中点处,则A处螺钉的水平拉力为 N(支架重力不计)。为了安全,室外机的位置应尽量 (选填“靠近”或“远离”)墙壁。
20.如图14甲所示,工人正试图用扳手拧松工件上一个紧固的螺母,尽管他使出了浑身力气,却没能成功。小明和小刚同学看到后,利用所学物理知识分别给他设计了一个新点子:小明设计的是在其它不变的情况下,取来一根绳子,将绳的一端系在扳手柄的上端,使劲拉绳的另一端,如图乙所示。小刚设计的是在其它不变的情况下,取来一个较长的套筒,将套筒套在扳手柄上,用力扳套筒的上端,如图丙所示。则:
(1)假如甲图和乙图工人都能把螺母拧下来,则拧下螺母所需要的最小力 (选填“甲大”或“乙大”或“一样大”);
(2)你会选择图 的方法来拧螺母,因为此种方法 ,所以更省力。
21.“暴走”是一种现今流行的运动方式。小明经过观察分析人的走路情形,发现可以将人的脚视为一个杠杆模型,如图15所示。行走时人的脚掌前端是支点,人体受到的重力是阻力,作用线过杠杆中点,小腿肌肉施加的力是动力。若小明的质量为60kg,则小明小腿肌肉产生的拉力约为 N;小明每向前走一步的过程中,重心升高约为4cm,则小明需克服自身重力约做功 J。
22.如图16中AOB是可绕O点无摩擦转动的轻质杠杆,A端挂重300N的重物,AO与BO的长度之比为5:4.人始终沿着竖直方向拉挂在B端的轻环。要使轻质杠杆水平平衡,则人应施加拉力大小为 N,要使人不被轻环拉起,则人重至少为 N.与水平平衡相比,当轻质杠杆在图中虚线位置平衡时,人的拉力将 (选填“变大”、“变小”或不变)。
23.如图17,由不同合金制成的黑、白两种实心球体积相等,黑、白两球的密度之比为3:5,此时杠杆水平平衡(不计杠杆、挂盘和细线的质量)。则m黑:m白= ,AO:OB= ;若在左边增加1个白球的同时,再在右边增加1个黑球,则杠杆 端下降(选填“左”或“右”)。
24.如图18所示,轻质杠杆OB可绕O点转动,OA=AB,物块G重30N,∠α=∠β=30°.在B点作用一个竖直向上的拉力F使杠杆在水平位置平衡,则F的大小为 N;保持杠杆在水平位置平衡,若仅将拉力F沿顺时针方向转动,则在转至虚线①所示位置的过程中,拉力大小将变 ,再转至虚线②所示位置静止时,拉力F大小为 N。
25.小明用如图19所示刻度、质量分布都均匀的杠杆探究杠杆平衡条件,实验前发现杠杆左端偏高,应向 (左/右)端调节平衡螺母,使杠杆在水平位置平衡。当杠杆水平平衡后,在左侧第2格上挂3个相同钩码(每个钩码重2N),则应在右侧第3格上用弹簧测力计竖直向下拉,使杠杆在水平位置平衡,则弹簧测力计示数应为 N.弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (增大/减小/不变)。
26.如图20,轻杆OA可绕O点自由转动,用细线将15N的重物挂在A处,小林在B处用竖直向上的拉力提住轻杆,OB和BA长度之比为3:5.下列问题中,轻杆始终在水平位置处于平衡。
(1)此杠杆类型与 (钓鱼竿/羊角锤)相同。
(2)拉力大小为 。
(3)若仅增加物重,则拉力的变化量与物重的变化量之比为 。
(4)若拉力方向变为图中虚线所示方向,则拉力将变 (大/小)。理由是 。
27.如图21所示,小明正在做俯卧撑,把他的身体看作一个杠杆,O为支点,A为重心,他的体重为450N.地面对手的支持力F的力臂是 m,大小为 N。
28.搬运砖头的独轮车的有关尺寸如图22所示,车箱和砖头总重G=1000N.推车时,人手向上的力F= N.
四.作图题(共4小题)
29.如图23所示。(1)画出拉力F1的力臂l1;
(2)画出重物G对杠杆的拉力F2的示意图,并画出F2的力臂l2。
30.如图24,画出使杠杆ABC平衡时的阻力F2和最小动力F1的示意图。
31.如图25所示是根据空调室外机(室外机和下面的支架为一个整体)建立的杠杆模型,请在图中画出并标明室外机受到重力的力臂l(以O点为支点)。
32.请用直尺和铅笔画出如图26所示杠杆的动力臂和阻力臂。
五.实验探究题(共3小题)
33.小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持 。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码(如图甲所示)为了使杠杆仍在水平位置平衡,他可以在B点处挂 个钩码或在B点用弹簧测力计拉杠杆。若采用弹簧测力计拉的方法,则弹簧测力计拉力的方向应竖直向 拉,竖直拉的目的是 。
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符。其原因是: 。
34.在“探究杠杆的平衡条件”实验中,每个钩码重力相等(均为50g),杠杆刻度均匀(每格长为5cm)。
(1)平衡时,应该让杠杆静止在 位置。
(2)若在操作实验的过程中,出现如图甲所示情境时,杠杆左端或右端的平衡螺母应向 (选填“左”或“右”)。
(3)杠杆调节平衡后,实验数据记录在下表中:
次数
动力/N
动力臂/cm
阻力/N
阻力臂/cm
1
1
30
2
15
2
1.5
10
1
15
3
2
10
0.5
在处理实验数据时,发现少测量一个数据,你认为表中的空缺应为 cm。
(4)下列四个因素中,会带来实验误差的是 (正确选项可能有多项)
A.铁架台自身的重力足够大 B.杠杆的转动轴没有通过其中心
C.悬挂钩码的绳套重力偏大 D.杠杆与转轴之间的摩擦偏大
(5)在完成规定实验后,有一组同学继续进一步探究,如果杠杆受到F2、F3两个阻力,结论会怎样?通过实验,他们得到了如图乙、丙所示的结果。根据这个结果,可以初步得出,在这种情况下杠杆的平衡条件为:F1L1= 。(F1、F2、F3的力臂分别用L1、L2、L3表示)
35.小明利用刻度均匀的匀质杠杆做探究“杠杆的平衡条件”实验。
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,如图甲所示。这时应将平衡螺母向 (选填“左”或“右”)端调节,直到杠杆在水平位置平衡,将杠杆调节水平平衡的目的是避免杠杆自重对实验的影响和便于 。
(2)如图乙所示,当杠杆水平平衡后,在左侧第2格挂3个相同的钩码,则应在右侧第3格上挂 个相同的钩码才能使杠杆水平平衡:若在左右两侧钩码的下方各增加1个钩码,则杠杆 (选填“能”或“不能”)保持平衡;若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐 (选填“增大”、“减小”或“不变”)。
(3)得出杠杆的平衡条件“动力×动力臂=阻力×阻力臂”后,小明又进一步探究杠杆平衡时动力和动力臂的关系。实验过程中,保持阻力和阻力臂不变,在杠杆水平平衡时,测出多组动力F1和动力臂L1的数据,并绘制了F1与L1的关系图象,如图丙所示。请根据图象推算,当L1为0.5m时,F1为 N。
六.解答题(共2小题)
36.如图是小明弯腰提起重物的情景,脊柱可绕骶骨(轴)O转动,腰背部肌肉对脊柱的拉力作用沿图中ab线,
①画出肌肉对脊柱的拉力F1,并画出这个力的力臂。
②肌肉对脊柱的拉力 绳子对手的拉力(选填“大于”、“等于”、“小于”),判断的依据是 。
37.图是人单手做俯卧撑时的简图,O为重心,O′为支点。手臂伸直时,地面对手的支持力沿直线ab。
(1)画出人所受的重力G。
(2)画出地面对手的支持力F。
(3)画出支持力的力臂L。
(4)根据公式 可判断G F(选填“大于”、“等于”或“小于”)
七.计算题(共3小题)
38.如图所示,某人用一根轻质木棒挑着重为120N的物体站在水平地面上,木棒保持水平,棒AB长为1.2m,重物悬挂处离肩膀距离BO为0.8m,
(1)则手在A端对木棒竖直向下的作用力大小为多少N?
(2)若人重为500N,双脚面积为40cm2,则该人在走路时对地面的压强为多少?
39.东营市借助国家“黄蓝”战略实现经济腾飞,如图所示是东营建设中常见的一种起重机的简化图,为了保证起重机吊起重物时不会翻到,在起重机右边配有一个重物m0;已知OA=12m,OB=4m。用它把质量为3×103kg,底面积为0.5m2、高为2m的长方体石墩G从空气中匀速放入水中某一位置,此时石墩完全浸没水中(g=10N/kg)。
(1)起吊前,石墩静止在水平地面时,它对地面的压强是多少?
(2)若石墩匀速从地面上吊起,起重机横梁始终保持水平,若起重机横梁自重不计,OA、OB的长度不变,右边的配重m0为多少千克?
(3)当石墩G从空中匀速浸没水中,若配重m0的位置、质量都不变,起重机始终保持水平,OA的长度如何变化?变化多少?
40.如图所示,轻质杠杆AB长1.2米,距支点O处0.2米的B端悬挂一个重力为3.6牛的铁球,A端处用细线沿竖直方向拉住杠杆保持水平平衡。求:
(1)细线对杠杆的A端的拉力。
(2)若在杠杆的适当位置处再悬挂一个重力为2牛的铜球,使细线剪断后杠杆仍能保持水平平衡,求铜球的悬挂点距O的距离。
沪科版物理八年级十章机械与人第一节 科学探究:杠杆的平衡条件
同步练习(综合练习)
参考答案与试题解析
一.选择题(共15小题)
G1LOA=G2LOB,
球的重力:
质量:G2=×G1=×600N=300N;
根据G=mg,球的质量:
m2===30kg。
故选:A。
【点评】本题考查了学生对杠杆的平衡条件的掌握和运用,估测出两力臂的大小关系是本题的突破口。
2.【分析】根据杠杆的平衡条件分析答题,杠杆平衡条件:动力×动力臂=阻力×阻力臂。
【解答】解:
A、由图可知:AB<BC;由杠杆平衡条件可得:G×AB=F1×BC,解得:F1=<G;
B、由图可知:AB>BC;由杠杆平衡条件可得:G×AB=F2×BC,解得:F2=>G;
C、由图可知:AC>BC;由杠杆平衡条件可得:G×AB=F3×AC,解得:F3=<G;
D、由图可知:AB<AC;由杠杆平衡条件可得:G×AC=F4×AB,解得:F4=>G;
由于杆长都相同,则比较B和D选项中的图可知:
B图中BC的长度与D图中AB的长度相等;B图中AB线段长度小于D图的AC线段长度,所以,F4>F2。
故选:D。
【点评】本题考查了杠杆平衡条件的应用,是一道基础题,应用杠杆平衡条件即可正确解题。
3.【分析】把水泥板看做一个杠杆,抬起一端,则另一端为支点。由于水泥板是一个厚度、密度都均匀的物体,所以,其重力的作用点在其中心上,此时动力F克服的是水泥板的重力,即此时的阻力臂等于动力臂的一半。在此基础上,利用杠杆的平衡条件,即可确定F甲与F乙的大小关系。
【解答】解:两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其重心都在其几何中心上,所以两图中动力臂都是阻力臂的2倍。
因为FL动=GL阻,
所以,F==G,
所以,前后两次所用的力相同,即F甲=F乙,故ABC都错误,D正确;
故选:D。
【点评】本题考查了杠杆平衡条件的应用,对于均匀的物体,抬起一端所用的力等于其重力的一半,知道对于形状规则质地均匀的物体,其重心在其几何中心上是关键。
4.【分析】根据杠杆平衡的条件进行分析,即动力乘以动力臂等于阻力乘以阻力臂,由题意可知杠杆应始终处于平衡状态,则可得出拉力的变化。
【解答】解:由题意可知,在圆环转动中,A的位置保持不变,故杠杆始终处于平衡状态;
因为重力与重力的力臂的乘积不变,所以根据杠杆平衡的条件可得,动力与动力的力臂的乘积不变,且动力臂越大,动力会越小;又因为圆环在图示位置时,动力臂最大,动力最小,所以E环从C端移动到D端的过程中,动力会由大到小,再由小到大,故ABC错误,D正确。
故选:D。
【点评】本题的关键在于灵活应用杠杆平衡的平衡条件,并能根据动力的方向确定力臂的变化,会根据阻力、阻力臂和动力臂的关系判断动力的变化。
5.【分析】根据杠杆的平衡条件判断分析F的方向。
【解答】解:
使箱体从图中位置绕O点缓慢逆时针转至竖直位置时,箱子的重力不变,即阻力不变,由下面的示意图可知阻力臂会逐渐减小。
根据杠杆的平衡条件:F1L1=F2L2知,要使力F的大小保持不变,则动力臂也应该减小;
A、当F垂直于OA时,动力臂大小不变,故A不符合题意;
B、若F水平向左时,在逆时针转动过程中动力臂增大,故B不符合题意;
C、若F沿OA向上时,动力F的力臂为零,不能将箱体从图中位置绕O点缓慢逆时针转至竖直位置,故C不符合题意;
D、若F竖直向上时,阻力臂减小时,动力臂也减小,故D符合题意。
故选:D。
【点评】本题考查了学生对杠杆平衡条件的了解和掌握,判断力臂变化是本题的关键。
6.【分析】先分析杠杆两边力和力臂的变化,根据杠杆平衡的条件F1L1=F2L2对各个选项逐一分析即可。
【解答】解:A、在液体体积相同时,液体的密度越大,质量越大,因此只有每次倒入空桶的液体体积相同,才能通过杠杆平衡条件得出液体质量的大小,从而判断液体密度的情况,故A正确;
B、当A端的空桶内的液体密度越大时,根据杠杆平衡的条件可知,在M悬挂点处标出相应液体的密度值越大,故应将M向右移动,所以秤的刻度值向右越来越大。故B正确;
C、增大M的质量,根据杠杆平衡的条件F1L1=F2L2,秤的量程会增大,故C正确;
D、物体M悬挂点B到O点的距离为阻力臂,悬点O适当右移,阻力臂减小,根据杠杆平衡的条件F1L1=F2L2,可知秤的量程会减小,故D错误。
故选:D。
【点评】本题关键是正确运用杠杆的平衡条件,同时在处理方程的时候也要注意技巧。
7.【分析】由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小。所以要判断哪个动力最小,就看哪个动力对应的动力臂最长。支点与动力作用点之间的连线就是最长的动力臂,与这条动力臂垂直的力即为最小动力。
【解答】解:由图可知,O为轻质杠杆的支点,在B点挂重物,若在杠杆上施加一个拉力使杠杆水平平衡,则拉力的方向应向上,故F4不符合要求;
根据力臂的定义和图示可知,F1、F3对应的力臂都小于F2对应的力臂;
由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;因为F2对应的动力臂最长,所以F2最小,即符合要求且最小的力是F2。
故选:B。
【点评】本题考查杠杆平衡条件的应用,使用杠杆,当阻力和阻力臂一定时,动力臂越长越省力,找出最长的动力臂是本题的关键。
8.【分析】杆秤实际是以提纽为支点的杠杆,利用杠杆平衡条件分析力或力臂的变化。
【解答】解:由题意和图示可知,权、重分别为杠杆的动力和阻力,标、本分别为动力臂和阻力臂,根据杠杆平衡条件知,权×标=重×本。
A、“权”小于“重“时,由“权×标=重×本”知,“标”一定大于“本”,故A错误;
B、“权”小于“重”时,“本”是一定的,但“标”是可以改变的,所以A端不一定上扬,故B错误;
C、增大“重”时,“本”不变,由“权×标=重×本”知,可以增大“标”,或增大“权”,故C错误。
D、增大“重”时,“权”和“本”不变,由“权×标=重×本”知,“标”会增大,所以应把“权”向A端移,故D正确;
故选:D。
【点评】此题考查杠杆平衡的条件及获取信息的能力,使学生感悟中国古代科技的成就。
9.【分析】AB、以O为支点,由F1L1=F2L2可求出兄弟二人对杠杆支持力之比,由于压力和支持力是一对相互作用力,可知兄弟二人承担的压力之比;
C、以弟弟的肩B为支点,由F1L1=F2L2求出哥哥对杠杆的支持力;由于压力和支持力是一对相互作用力,可知哥哥承担的压力;
D、以哥哥的肩A为支点,由F1L1=F2L2可知弟弟对杠杆的支持力,由于压力和支持力是一对相互作用力,可知弟弟承担的压力。
【解答】解:
AB、以O为支点,由F1L1=F2L2可知,兄弟二人对杠杆支持力之比为:
====,
由于压力和支持力是一对相互作用力,因此兄弟二人承担的压力之比为4:5或5:4;故AB错误;
C、以弟弟的肩B为支点,由F1L1=F2L2可知,哥哥对杠杆的支持力:
F1′===500N;
由于压力和支持力是一对相互作用力,因此哥哥承担的压力为500N,故C错误;
D、以哥哥的肩A为支点,由F1L1=F2L2可知,弟弟对杠杆的支持力:
F1===400N;
由于压力和支持力是一对相互作用力,因此弟弟承担的压力为400N,故D正确;
故选:D。
【点评】本题考查了学生对杠杆平衡条件的理解和灵活运用及力的相互性,根据图示得出不同情况下已知力和力臂的大小是本题的解题关键。
10.【分析】(1)根据题意找到杠杆的五要素,即支点、动力、动力臂、阻力、阻力臂;
(2)杠杆的分类方法及特点:动力臂大于阻力臂的杠杆为省力杠杆(省力费距离);动力臂小于阻力臂的杠杆为费力杠杆(费里省距离);动力臂等于阻力臂的杠杆为等臂杠杆(不省力也不费距离)。
【解答】解:手是一个杠杆时,如图所示:
支点O在腕关节处,球压在掌心上的力是阻力F2,方向竖直向下,过支点作阻力F2 的垂线得到的线段即为阻力臂L2,前臂中的屈肌收缩产生的动力F1,方向水平向右,过支点作动力F1的垂线得到的线段即为动力臂L1,由图可知:阻力臂很明显大于动力臂。
所以是费力杠杆,费力杠杆的特点是:省距离。
故选:B。
【点评】解决本题的关键:一是根据题意找到杠杆的五要素,特别是找到动力臂和阻力臂,二是掌握杠杆的分类及其特点。
11.【分析】活塞式抽水机手柄可以看作是绕O点转动的杠杆,选项中的四个量应该分别代表了杠杆的动力、动力臂、阻力、阻力臂,关键是正确确定力臂大小,由杠杆的平衡条件即可解答。
【解答】解:读图可知,F1为动力,其力臂是支点到动力作用线的垂直距离,应为OE;F2为阻力,其力臂是从支点到阻力作用线的垂直距离,应为OB,所以根据杠杆的平衡条件,最终的平衡关系是F1?OE=F2?OB,只有选项D符合题意。
故选:D。
【点评】本题考查杠杆的平衡条件,关键是力臂的确定。
12.【分析】判定杠杆是否平衡关键是它是否满足杠杆的平衡条件:动力×动力臂=阻力×阻力臂。
【解答】解:设杠杆的分度值为 L,一个砝码的重为G.原来2G×4L=4G×2L;
A、左、右砝码各向支点移动一格,左边=2G×3L=6GL,右边=4G×L=4GL,左边>右边,杠杆向左端下沉,不符合题意。
B、左右各减少一个砝码,左边=G×4L=4GL,右边=3G×2L=6GL,左边<右边,杠杆向右下沉,不符合题意。
C、左、右砝码各减少一个,左边=G×4L=4GL,右边=2G×2L=4GL,左边=右边,杠杆平衡;符合题意。
D、左右各增加两个砝码,左边=4G×4L=16GL,右边=6G×2L=12GL,左边>右边,杠杆向左端下沉,不符合题意。
故选:C。
【点评】杠杆是否平衡取决于力和力臂的乘积是否相等,只比较力或力臂大小不能得出正确结果。
13.【分析】从题知,OA处于水平位置,GA对杠杆的拉力为竖直向下,所以G1对杠杆拉力的力臂即为杠杆AO的长度,G2对杠杆拉力的方向也是竖直向下,但OB不是处于水平,所以GB对杠杆拉力的力臂OB′小于OB的长度,根据杠杆的平衡条件分析,即可得出两个物体重力的大小。
【解答】解:根据杠杆的平衡条件:F1L1=F2L2可知,力与相应的力臂成反比关系,
它们的杠杆示意图如右,因为AO=BO,
所以LOA>LOB′,所以物体的重力G1<G2。
故选:D。
【点评】本题考查了学生对杠杆的平衡条件掌握和运用,能找到各自力的力臂、确定其大小关系是本题的关键。
14.【分析】由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小。所以要判断哪个动力最小,就看哪个动力对应的动力臂最长。支点与动力作用点之间的连线就是最长的动力臂,与这条动力臂垂直的力即为最小动力。
【解答】解:由图可知,O为支点,A点挂一重物,阻力方向向下,为使杠杆在水平位置平衡,在B点施加一个力,则动力F与杠杆垂直且方向向上,
要使该力最小,由杠杆平衡条件F1L1=F2L2可知,在阻力和阻力臂都一定的情况下,动力臂越长则动力越小;
由图可知,BM对应的动力臂最长,所以该力应沿BM方向;
故选:A。
【点评】首先判断最小力的力臂,一般找支点和作用点之间的最长距离为最大力臂,在该点施加的力才最小。确定好最小的力,还要根据杠杆情况判断施力方向。
15.【分析】(1)根据功的原理可知:使用任何机械都不省功;
(2)画出动力臂,根据三角形的角边关系得出动力臂的大小;
(3)又知道阻力和阻力臂的大小;利用杠杆的平衡条件求动力的大小。
(4)根据杠杆平衡条件:动力×动力臂=阻力×阻力臂,在阻力×阻力臂一定的情况下,动力臂越大,动力将越小。判断出最小拉力的大小,
【解答】解:A、根据功的原理可知:使用任何机械都不省功;所以,利用该机械提起重物时不能省功,故A正确;
B、如图,在△ACO中,知道∠CAO=30°,则拉力F的力臂L=OC=OA=×80cm=40cm,故B正确;
C、重力的力臂为OB=OA﹣AB=80cm﹣50cm=30cm,G=30N,
根据杠杆平衡条件得:
F?OC=G?OB,
∴F===22.5N,故C正确;
D、在阻力×阻力臂一定的情况下,动力臂越大,动力将越小。由图示可知,当OA为动力臂时,作用在A点的动力最小,即力垂直于杠杆向上,故现在的拉力F不是最小作用力,故D错误。
故选:D。
【点评】本题考查了学生对杠杆平衡条件的掌握和利用,画出动力臂根据三角形的角边关系求出动力臂的大小是本题的突破口。
二.多选题(共3小题)
16.【分析】(1)调节杠杆两端的平衡螺母使杠杆在水平位置平衡。杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;同时也为了消除杠杆自重对杠杆平衡的影响;
(2)(3)用杠杆的平衡条件来判断,力和力臂乘积大的一端下沉;
(4)根据杠杆平衡条件,阻力和阻力臂不变时,弹簧测力计倾斜,动力臂变小,动力变大
【解答】解:A、挂钩码前,调节杠杆水平平衡时,发现杠杆静止时左端高于右端。要使杠杆在水平位置平衡,需把杠杆右端的平衡螺母向左移,故A错误;
B、设一个钩码的重力为G,杠杆一个小格代表L,
如果在图甲中杠杆两侧各去掉一个相同的钩码时,
杠杆的左端:3G×3L=9GL,
杠杆的右端:2G×4L=8GL,
所以杠杆的左端力和力臂的乘积大于右端的乘积,所以杠杆左端下沉。故B正确;
C、将图甲中挂在A、B两处的钩码向靠近支点O移近1格,
杠杆的左端:4G×2L=8GL,
杠杆的右端:3G×3L=9GL,
所以杠杆的左端力和力臂的乘积小于右端的乘积,所以杠杆右端下沉。故C正确;
D、弹簧测力计竖直向上拉杠杆时,拉力力臂为OC,弹簧测力计倾斜拉杠杆,拉力的力臂小于OC,拉力力臂变小,拉力变大,弹簧测力计示数变大;弹簧测力计不在竖直向上方向拉也能保持杠杆在水平位置平衡,故D错误。
故选:BC。
【点评】杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,因此在此实验中我们应首先调节杠杆在水平位置平衡,减小了杠杆的自重对实验的影响,便于测量力臂
17.【分析】(1)杠杆左端下沉,说明杠杆的重心在支点左侧,调节平衡螺母应使杠杆重心右移;
(2)挂上钩码后,为使杠杆在水平位置重新平衡,不能再次调节平衡螺母;
(3)从支点到动力作用线的垂直距离叫动力臂;从支点到阻力作用线的垂直距离叫阻力臂;
(4)根据杠杆的平衡条件分析解答。
【解答】解:A、杠杆的左端下沉,说明这一侧力与力臂的乘积大,应将平衡螺母向右调节,故A正确;
B、挂上钩码后,为使杠杆在水平位置重新平衡,不能再次调节平衡螺母,故B错误;
C、在A点挂上钩码后,力与力臂的乘积产生的效果是逆时针转动,在B点施加的力与力臂的乘积产生的效果是顺时针转动,杠杆才能保持平衡,故B点力的方向应竖直向下,故C错误;
D、将A点的钩码向左移动,阻力臂变大,在阻力、动力臂不变的情况下,为使杠杆水平位置保持平衡,在B点施加的力将变大,故D正确。
故选:AD。
【点评】本题研究“杠杆平衡条件”,考查器材的调试、杠杆平衡条件的运用、力臂的理解。
18.【分析】(1)结合图片和生活经验,先判断杠杆在使用过程中,动力臂和阻力臂的大小关系,再判断它是属于哪种类型的杠杆。
(2)家庭用无线遥控器大多是通过红外线来控制的。
(3)增大摩擦力的方法:①增大压力,②增大接触面的粗糙程度;
(4)“自拍神器”是利用凸透镜成倒立、缩小的实像工作的。
【解答】解:
A、在使用伸缩杆照相时,动力臂小于阻力臂,属于费力杠杆,故A错;
B、无线遥控器是通过红外线来控制的,故B正确;
C、杆柄表面用较粗糙材料制成,是通过增大接触面的粗糙程度来增大摩擦力,故C正确;
D、当人站着自拍时,手机相当于一个凸透镜,成倒立、缩小的实像,故D错。
故选:AD。
【点评】此题主要考查了有关凸透镜成像的规律及应用、判断杠杆的类型、增大摩擦的方法等多个知识点,是一道综合性较强的题目。
三.填空题(共10小题)
19.【分析】(1)三角支架ABC可看作杠杆,如果A处螺钉松脱,则支架会绕C点倾翻;
(2)分析杠杆五要素,根据杠杆的平衡条件求出A处螺钉的水平拉力;
根据杠杆的平衡条件,分析不变的量和可变的量,得出要减小水平拉力F的措施。
【解答】解:
(1)用固定在墙上的三角支架ABC放置空调室外机。如果A处螺钉松脱,则支架会绕C点倾翻;
(2)C点是支点,空调受到重力而作用在支架上的力是阻力,由杠杆平衡条件可知:F×AC=G×AB;
A处螺钉的水平拉力为:
F=×G﹣﹣﹣﹣﹣﹣﹣①。
代入已知量得:
F=×300N=200N;
为了安全,即减小水平拉力F;由①知,在AC、G不变的前提下,要减小AB,故A处螺钉的水平拉力室外机的位置应尽量靠近墙壁。
故答案为:C;200;靠近。
【点评】此题考查了杠杆平衡条件的应用,关键是将实际问题转化为杠杆问题,体现了物理知识与生活的紧密联系。
20.【分析】(1)甲乙两图中,阻力和阻力臂一定,动力不变,施加的动力的方向不变,动力臂不变,只是改变了作用点,不能省力,
(2)使用轮轴时,轮半径是轴半径的几倍,作用轮上的力就是轴上力的几分之一。
【解答】解:(1)图乙和图甲比较,前后两种做法力臂没有改变,因为阻力和阻力臂不变,根据杠杆的平衡条件得出不能省力,因此拧下螺母所需要的最小力是一样大的;
(2)图丙中用了一个较长的套筒套在扳手柄上,相当于加长了轮半径,因此会更省力,应选择图丙的方法来拧螺母,因为此种方法动力臂更长,所以更省力。
故答案为:(1)一样大;(2)丙;动力臂更长。
【点评】此题主要考查了轮轴的省力情况与轮半径之间的关系,与生活实际相联系,更具有实际意义。
21.【分析】(1)根据杠杆的平衡条件分析解答小腿肌肉对脚的拉力;
(2)小明踮脚过程中克服重力做功等于踮脚一次所做的功;
【解答】解:
(1)小明的重力G=mg=60kg×10N/kg=600N,
由图知,由于重力作用线过杠杆中点,且拉力的方向竖直向上,则拉力F的力臂L1=2L2;
根据杠杆的平衡条件可得:FL1=GL2,
则小腿肌肉对脚的拉力:F===300N;
(2)每向前走一步的过程中,小明克服自身重力做的功:W=Gh=600N×0.04m=24J。
故答案为:300;24。
【点评】本题考查了杠杆的平衡条件、功的计算,其中小明踮脚过程中克服重力做功W=Gh。
22.【分析】(1)杠杆在水平位置平衡,知道动力臂和阻力臂的关系,以及在A点施加大小,利用杠杆的平衡条件F1L1=F2L2计算出杠杆B点人应施加拉力。人要不被拉起,则人重至少等于人应施加拉力;
(2)当轻杆在图中虚线位置平衡时,两力臂的比值不变,物体的重力不变,根据杠杆的平衡条件可知人的拉力大小。
【解答】解:
(1)由题知,AO:OB=5:4,G=300N,
要使轻杆水平平衡,根据杠杆平衡条件可得:G×OA=F×OB,
则拉力大小F===375N,
人要不被拉起,则人重至少等于人应施加拉力,即人重至少为375N;
(2)当轻杆在图中虚线位置平衡时,与水平平衡相比,倾斜后力臂都变小,但由相似三角形的知识可知,两力臂的比值不变,仍为5:4,且物体的重力不变,根据杠杆的平衡条件可知人的拉力不变,仍为375N。
故答案为:375;375;不变。
【点评】杠杆在水平位置平衡后,支点到力的作用线的距离就是力臂,这点是考查的重点,也是学生容易忽视的地方。
23.【分析】(1)根据m=ρV,在体积相等时,质量与密度成正比;
(2)根据杠杆的平衡条件结合黑、白两球的质量之比求左右两边的力臂之比;
(3)若在左边增加1个白球的同时,再在右边增加1个黑球,根据左右两边力与力臂积大小确定哪端下降。
【解答】解:
(1)根据m=ρV可知,在体积相等时,质量与密度成正比,
黑、白两种球的密度之比为ρ黑:ρ白=3:5,则黑、白两球的质量之比为3:5;
(2)因黑、白两球的质量之比为3:5,则可设黑球的质量为3m,白球的质量为5m,
设杠杆左边的力臂为L1,右边的力臂为L2,
根据图示和杠杆平衡条件可得:(3m×2+5m)g×L1=(3m+5m×2)g×L2,
化简可得左右两边的力臂之比为L1:L2=13:11;
则:
AO:OB=L1:L2=13:11;
(3)若在左边增加1个白球的同时,再在右边增加1个黑球,则两边力与力臂之积分别为:
左边:(3m×2+5m×2)g×L1=16mgL1,
右边:(3m×2+5m×2)g×L2=16mgL2,
因L1:L2=13:11;
所以,比较可知,左边力与力臂之积大于右边力与力臂之积,
故杠杆左端将下沉。
故答案为:3:5; 13:11;左。
【点评】本题考查密度公式和杠杆平衡条件的运用。当左边力与力臂之积等于右边力与力臂之积时,杠杆平衡;当左边力与力臂之积大于右边力与力臂之积,左端下沉。
24.【分析】从支点向力的作用线作垂线,垂线段的长度即力臂。根据杠杆平衡条件动力×动力力臂=阻力×阻力力臂求出F,分析力臂变化可知力的变化。
【解答】解:
(1)因为OA=AB,则OB=2OA;
由杠杆平衡条件得:F×OB=G×OA,
所以,F===15N,
(2)保持杠杆在水平位置平衡,将拉力F沿顺时针方向转动,在转至①位置时,拉力的力臂变小,因为阻力与阻力臂不变,由杠杆的平衡条件可知,拉力变大;
(3)保持杠杆在水平位置平衡,将拉力F沿顺时针方向转动,在转至②位置时,由于∠β=30°,由直角三角形的知识可知,动力F的力臂OD=OB,
由杠杆平衡条件得:F′×OD=G×OA,
即:F′×OB=G×OB,
所以此时的拉力F′=G=30N。
故答案为:15;变大;30。
【点评】考查杠杆平衡条件的应用,利用平衡条件公式,分析力臂变化可知力的变化,注意灵活运用。
25.【分析】(1)杠杆倾斜时,杠杆的重心偏向杠杆下沉的一端,左、右两端的螺母(或一端的螺母)要向杠杆上翘的一端调节。
(2)根据题意确定动力臂的大小,根据杠杆平衡条件分析求解;
(3)分析测力计由竖直方向逐渐向左转动时力臂的变化,根据杠杆的平衡条件分析。
【解答】解:(1)实验前杠杆左端偏高左侧高,右端低,根据杠杆的平衡条件可知,应向左调节平衡螺母,
(2)设杠杆的一个小格为L,因在右侧第3格上用弹簧测力计竖直向下拉,根据力臂的定义,动力臂为3L,根据根据杠杆平衡条件F1L1=F2L2,即F×3L=3×2N×2L,则弹簧测力计示数F=4N;
(3)弹簧测力计在竖直方向向下拉时,动力臂OB,如下所示:
由竖直方向逐渐向左转动,阻力、阻力臂不变,动力臂为直角三角形OBA的直角边OA,
根据数学知识,直角边OA小于斜边OB,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大。
故答案为:左;4;增大。
【点评】本题探究杠杆平衡条件的,掌握器材的调试、杠杆的平衡条件的运用。是解题的关键。
26.【分析】(1)当动力臂小于阻力臂时,动力大于阻力,杠杆是费力力杠杆;
(2)根据杠杆平衡的条件F1L1=F2L2可直接求出动力F1的大小;
(3)若仅增加物重,根据杠杆平衡的条件F1L1=F2L2可直接求出;
(4)若拉力方向变为图中虚线所示方向,阻力的力臂不变,拉力的力臂变小,根据杠杆的平衡条件可知拉力的变化。
【解答】解:由图可知,O点为支点,在B点的拉力为动力,阻力大小等于所挂物体的重力,则OB为动力臂,OA为阻力臂;
(1)由图可知,OB小于OA,即动力臂小于阻力臂,所以是费力杠杆;钓鱼竿就是此杠杆类型;
(2)已知OB和BA长度之比为3:5,则OB:OA=3:8,
由杠杆的平衡条件可知:F?OB=G?OA,
所以,F=?G=×15N=40N;
(3)若仅增加物重,则F2=G+△G,设拉力的变化量为△F,则此时的拉力F1=F+△F;
由杠杆的平衡条件可知:F1?OB=F2?OA,
即:(F+△F)?OB=(G+△G)?OA,
所以,F?OB+△F?OB=G?OA+△G?OA,
由于F?OB=G?OA,
所以,△F?OB=△G?OA,则==;
(4)若拉力方向变为图中虚线所示方向,阻力及阻力臂不变,拉力的力臂变小,由杠杆的平衡条件F1L1=F2L2可知拉力将变大。
故答案为:(1)钓鱼竿;(2)40N;(3)8:3;(4)大;拉力的力臂减小。
【点评】此题结合实例考查了对杠杆的平衡条件的理解与应用,会通过计算比较动力和阻力的大小,从而判断是什么类型的杠杆。
27.【分析】(1)力臂是指从支点到力的作用线的垂直距离,根据图示确定动力臂和阻力臂的长度;
(2)已知重力、动力臂和阻力臂,根据杠杆平衡的条件进行计算。
【解答】解:
(1)由图可知,支点到支持力作用线的垂线段为动力臂,即动力臂L1=0.9m+0.6m=1.5m,
(2)支点到重力作用线的垂线段为阻力臂,即阻力臂L2=0.9m;
根据杠杆平衡的条件可得:FL1=GL2,
即:F×1.5m=450N×0.9m,
解得F=270N。
故答案为:1.5;270。
【点评】本题考查了学生对杠杆的平衡条件的掌握和运用,关键是从图中找出动力臂和阻力臂。
28.【分析】找出支点,弄清楚动力臂和阻力臂,根据杠杆的平衡条件F1L1=F2L2可以求出作用在车把上竖直向上的力的大小。
【解答】解:由图可知,支点在轮的轴处,动力臂为0.3m+0.7m=1m,阻力臂为0.3m,由FL1=GL2可得,F×1m=1000N×0.3m,解得F=300N。
故答案为:300。
【点评】此题主要考查的是杠杆平衡条件的应用,属于中考的常见题型,难度不大。
四.作图题(共4小题)
29.【分析】(1)力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
(2)确定重物G对杠杆的拉力的作用点和方向,根据力的示意图的画法画出即可。
【解答】解:(1)由图可知,杠杆的支点为O,反向延长拉力F1画出力的作用线,然后过支点O做拉力F1的垂线段,即为其力臂L1;
(2)重物G对杠杆的拉力F2的作用点在杠杆上,方向竖直向下;过支点O作F2的作用线的垂线段,即为力臂L2;如图所示:
【点评】此类题的关键是掌握杠杆五要素,然后根据杠杆的五要素作出相应的作用力或力臂,并且作图要求规范。
30.【分析】根据杠杆平衡的条件,F1×L1=F2×L2,在杠杆中的阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长。而在通常情况下,连接杠杆中支点和动力作用点这两点所得到的线段最长,物体的重力即为阻碍杠杆转动的力,即阻力F2,方向竖直向下。
【解答】解:①连接OC就是最长的动力臂,根据杠杆平衡的条件,要使杠杆平衡动力方向向上,据此可画出最小的动力;
②B为阻力作用点,阻力F2的方向竖直向下;如下图所示:
【点评】做出杠杆中的最小动力,可以按照以下几个步骤进行:
1、确定杠杆中的支点和动力作用点的位置;
2、连接支点与动力作用点,得到最长的线段;
3、经过动力作用点做出与该线段垂直的直线;
4、根据杠杆平衡原理,确定出使杠杆平衡的动力方向。
31.【分析】力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。
②确定力的作用点和力的方向,画出力的作用线。
③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
【解答】解:延长重力G画出力的作用线,然后从支点O向力的作用线作垂线,支点到垂足的距离就是重力的力臂L.如图所示:
【点评】画杠杆的力臂一是要找准支点,二是要准确画出力的作用线,然后才是从支点作力的作用线的垂线,最后还应该用字母将其标出来。
32.【分析】已知支点、动力和阻力的方向,根据力臂的画法,过支点作动力作用线和阻力作用线的垂线段,即动力臂和阻力臂。
【解答】解:分别反向延长动力F1和阻力F2的作用线,然后分别过支点O作力F1和F2作用线的垂线段,即为动力臂和阻力臂L1、L2;如图所示:
【点评】力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
五.实验探究题(共3小题)
33.【分析】(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,说明杠杆的重心在支点的右侧,据此确定平衡螺母调节的方向;
杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂大小;杠杆的重心过支点,消除杠杆重对杠杆平衡的影响;
(2)知道动力臂、阻力、阻力臂,根据杠杆平衡条件F1L1=F2L2求出动力,求出钩码的数量;
探究杠杆平衡条件时,使杠杆在水平位置平衡,此时力与杠杆垂直,力臂的长度可以直接从杠杆上读出来;
(3)杠杆的重心不通过支点,则其重力会对杠杆的平衡造成影响。
【解答】解:
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉,说明杠杆的重心在支点的右侧,此时,应把杠杆两端的平衡螺母向左调节,使杠杆在不挂钩码时,保持在水平位置平衡;
(2)设杠杆的一个小格为L,一个钩码的重力为G,
甲图,由杠杆平衡条件得,4G×3L=nG×2L,
所以n=6(个),所以应在杠杆右边B处挂6个钩码。
杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,若采用弹簧测力计拉的方法,则弹簧测力计拉力的方向最好为竖直向下,根据力臂的定义,力的作用点与支点的距离等于动力臂的大小,其目的是便于测量力臂;
(3)用如图乙所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响。
故答案为:(1)左;水平位置平衡;(2)6;下;便于测量力臂;(3)杠杆的自重对杠杆平衡有影响。
【点评】此题是探究杠杆平衡条件,考查杠杆的调试、平衡条件的运用、实验的操作、力臂的概念等知识。
34.【分析】(1)杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂(重力的方向跟杠杆垂直),同时能够消除杠杆自身重力对杠杆平衡的影响,因此在此实验中我们应首先调节杠杆在水平位置平衡;
(2)调节杠杆平衡的原则是杠杆左倾向右调节螺母,螺母的调节方向是向上翘的那端调节。
(3)已知此题中的动力和动力臂不变,据杠杆的平衡条件分析即可解决;
(4)对各选项分析解答;
(5)无论两侧挂几组钩码,每一组都有自己的力与力臂,因此,求出每一个力与相应力臂的乘积,再相加,就是整个这一侧的结果,同样表示出另一侧,看两者是否平衡。
【解答】解:(1)为了便于从杠杆上直接读取力臂,在进行实验时应该使杠杆在水平位置平衡;
(2)杠杆不在水平位置,右端偏低,则重心应向左移动,故应向左调节左端或右端的平衡螺母。
(3)根据F1L1=F2L2可知,2N×10cm=0.5N×L2,
解得L2=40cm;
(4)A.铁架台自身的重力足够大目的使杠杆稳定,但对杠杆的平衡无影响,故A不符合题意;
B.杠杆的转动轴没有通过其中心,对实验结果有影响,故B符合题意;
C.悬挂钩码的绳套重力偏大,会对力的真实值有影响,故C符合题意;
D.杠杆与转轴之间的摩擦偏大会影响杠杆的灵敏,对测量结果造成误差,故D符合题意。
故选BCD。
(5)设一个钩码的重力为G,杠杆一个格的长度为L,根据杠杆平衡条件可知,杠杆右侧F3L3+F2L2=2G×2L+2G×4L=12GL;杠杆左侧F1L1=4G×3L=12GL,故左侧等于右侧,故F3L3+F2L2=F1L1。
故答案为:(1)水平;(2)左;(3)40;(4)BCD;(5)F3L3+F2L2。
【点评】本题主要考查对“探究杠杆平衡条件”的实验内容的了解,是一道中等题。
35.【分析】(1)调节杠杆平衡时,应将平衡螺母向上翘的一端移动;实验中调节杠杆在水平位置平衡,力与杠杆垂直,并便于测量力臂;
(2)根据杠杆平衡条件,判断在右侧第3格上挂几个钩码;根据该杠杆的平衡条件判断;
弹簧测力计竖直向下拉杠杆时,力臂在杠杆上,当弹簧测力计倾斜拉杠杆时,力臂变短,阻力、阻力臂不变,动力臂变短,动力变大。
(3)由找到力与对应的力臂的值,由杠杆的平衡条件求解
【解答】解:(1)杠杆右端下沉,应将平衡螺母向左端移动,使其在水平位置平衡目的是为了便于测量力臂;
(2)设一个钩码的重力为G,杠杆的一个小格为L,
根据杠杆平衡条件得:3G×2L=2G×3L,
所以,应在右侧第3格上挂2个钩码。
平衡后,在两边钩码的下方再各增加一个和上面同样的钩码,左边:
(3+1)G×2L=8GL,
右边:(2+1)G×3L=9GL,不满足F1L1=F2L2,
则杠杆不能保持平衡。
若在右侧改用弹簧测力计向下拉,弹簧测力计由竖直方向逐渐向左转动时,阻力、阻力臂不变,动力臂逐渐变小,根据杠杆平衡条件得,动力逐渐变大,弹簧测力计示数将逐渐增大;
(3)由图可知,当F1=3N时,L1=0.2m;
由于此题中的阻力和阻力臂不变,根据F1L1=F2L2可知,
利用图象中任意一组数据都能得出,F2L2=F1L1=0.2m×3N=0.6N?m;
所以,若当L1为0.5m时,
F1===1.2N。
故答案为:(1)左;测量力臂;(2)2;不能;增大;(3)1.2。
【点评】本题探究杠杆平衡条件,考查杠杆平衡条件的运用、对力臂的理解及从图中获取信息的能力。
六.解答题(共2小题)
36.【分析】①分析出肌肉对脊柱的拉力的作用点和方向后,按照力的示意图的画法画出拉力示意图;
已知支点位置,从支点向拉力的作用线引垂线段,就是拉力的力臂;
②根据杠杆平衡条件判断肌肉对脊柱的拉力和绳子对手的拉力的大小关系。
【解答】解:
①腰背部肌肉对脊柱的拉力作用沿图中ab线,作用点在脊柱上,物体向下的拉力使脊柱顺时针转动,则背部肌肉产生拉力应让脊柱逆时针转动,所以方向向左,由此画出这个力F1;
由题知,O为支点,从O点作拉力F1作用线的垂线段,即这个力的力臂。如图所示:
②画出绳子对手拉力的力臂L2,由图知L1<L2,根据杠杆平衡条件可知,肌肉对脊柱的拉力大于绳子对手的拉力。
故答案为:①见上图;②大于;杠杆平衡条件。
【点评】此题考查的是力的示意图的作法和杠杆力臂作法,杠杆平衡条件的应用,是基本技能和规律的考查,要掌握好。
37.【分析】(1)(2)确定重力和支持力的作用点和方向,然后按照力的示意图的画法画出重力和支持力的示意图;
(2)力臂是指从支点到力的作用线的距离;力臂的画法:①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
(4)根据杠杆平衡条件,结合图示分析G和F的大小关系。
【解答】解:(1)人所受的重力的作用点在重心O上,方向竖直向下,过点O,沿竖直向下的方向画一条有向线段,用G表示,即为重力示意图;如图所示:
(2)地面对手的支持力的作用点在手上,方向垂直于地面向上,过支持力的作用点,沿垂直于地面向上的方向画一条有向线段,用F表示,即为地面对手的支持力;如图所示:
(3)由图可知,支点为O′,过支点作支持力作用线的垂线段,即为支持力的力臂L1.如图所示:
(4)把人看做一个杠杆,人此时在重力和支持力的作用下保持平衡状态,根据杠杆平衡条件:动力×动力臂=阻力×阻力臂(FL1=GL2)可知,此时动力臂L1大于阻力臂L2,所以G大于F。
故答案为:(1)(2)(3)见解答图;(4)FL1=GL2;大于。
【点评】此题考查力的示意图、力臂的画法、同时考查杠杆平衡条件的应用,是一道综合性很强的题目,要求学生数量掌握相关作图方法和物理知识。
七.计算题(共3小题)
38.【分析】(1)木棒以人肩作为支点,并在水平位置处于平衡状态,利用杠杆的平衡条件F1L1=F2L2可求得手对木棒的作用力。
(2)分析人对地面的压力和受力面积大小,由压强公式p=求解。
【解答】解:(1)肩膀是支点,木棒保持水平,手在A端对木棒竖直向下的作用力为动力,根据力臂的定义,OA为动力臂,OB为阻力臂,由杠杆平衡条件可得:
F×OA=G×OB,即:F×(AB﹣OB)=G×OB,
F×(1.2m﹣0.8m)=120N×0.8m,
解得,手在A端对木棒施加的力:F=240N;
(3)人重为500N,用一根轻质木棒(重力可不计)挑着重为120N的物体站在水平地面上,则对地面的压力:
F′=500N+120N=620N,
双脚面积为40cm2,人在走路时与地面的接触面积S=×40cm2=20cm2,即受力面积,
对地面的压强:
p===3.1×105Pa;
答:(1)则手在A端对木棒竖直向下的作用力大小为240N;
(2)若人重为500N,双脚面积为40cm2,则该人在走路时对地面的压强为3.1×105Pa。
【点评】本题考查杠杆平衡条件、压强的计算,关键是找出杠杆的五要素和受力面积的确认。
39.【分析】(1)在水平地面上物体的压力和自身的重力相等,根据G=mg求出其大小,然后根据公式p=求出起吊前它对地面的压强;
(2)以O作为支点,将物重和配重分别看作动力和阻力,已知两力臂OA、OB的长,根据杠杆的平衡条件列式求解即可。
(3)石墩G从空气中匀速浸没水中的过程中,受到的浮力逐渐变大,根据杠杆的平衡条件可求OA的长度,即可求变化多少。
【解答】解:(1)石墩的重力:
G=mg=3×103kg×10N/kg=3×104 N,
石墩静止在水平地面时,它对地面的压强:
P===6×104Pa;
(2)石墩匀速从地面上吊起,所以FA=G═3×104 N,
根据杠杆平衡条件可得FA?AO=FB?BO,
所以FB===9×104 N,
配重的质量:mo===9×103kg,
(3)石墩G从空气中匀速浸没水中的过程中,受到的浮力逐渐变大,
最大浮力为F浮=ρV排g=1×103kg/m3×0.5m2×2m×10N/kg=104N,
则拉力FA最小为FA实=G﹣F浮=3×104 N﹣104N=2×104 N,
此时AO的长度应为:
AO′===18m,
AO变为AO′,变长了18m﹣12m=6m。
答:(1)起吊前,石墩静止在水平地面时,它对地面的压强是6×104Pa;
(2)若石墩匀速从地面上吊起,起重机横梁始终保持水平,若起重机横梁自重不计,OA、OB的长度不变,右边的配重m0为9×103kg;
(3)当石墩G从空中匀速浸没水中,若配重m0的位置、质量都不变,起重机始终保持水平,OA的长度变长,变化了6m。
【点评】本题考查压强、拉力、时间、浮力以及杠杆的计算,关键是公式及其变形的灵活应用,重点知道在水平地面上压力等于物体自身重力和杠杆平衡条件的应用。
40.【分析】(1)细线对杠杆的A端的拉力即作用在杠杆的动力F1,由已知条件,根据杠杆的平衡条件求解;
(2)细线剪断后杠杆仍能保持水平平衡,故铜球的悬挂点在O点左侧,由已知条件,根据杠杆的平衡条件求铜球的悬挂点距O的距离。
【解答】解:(1)细线对杠杆的A端的拉力即作用在杠杆的动力F1,根据杠杆的平衡条件
F1×OA=G×OB,
作用在杠杆的动力:
F1=×G=×3.6N=0.72N;
(2)铜球的悬挂点距O的距离为0.36米。
【点评】本题考查杠杆平衡条件的运用,难度不大。
同课章节目录
- 第一章 打开物理世界的大门
- 第一节 走进神奇
- 第二节 探索之路
- 第三节 站在巨人的肩膀上
- 第二章 运动的世界
- 第一节 动与静
- 第二节 长度与时间的测量
- 第三节 快与慢
- 第四节 科学探究:速度的变化
- 第三章 声的世界
- 第一节 科学探究:声音的产生与传播
- 第二节 声音的特性
- 第三节 超声与次声
- 第四章 多彩的光
- 第一节 光的反射
- 第二节 平面镜成像
- 第三节 光的折射
- 第四节 光的色散
- 第五节 科学探究:凸透镜成像
- 第六节 神奇的眼睛
- 第五章 质量与密度
- 第一节 质量
- 第二节 学习使用天平和量筒
- 第三节 科学探究:物质的密度
- 第四节 密度知识的应用
- 第六章 熟悉而陌生的力
- 第一节 力
- 第二节 怎样描述力
- 第三节 弹力与弹簧测力计
- 第四节 来自地球的力
- 第五节 科学探究:摩擦力
- 第七章 力与运动
- 第一节 科学探究:牛顿第一定律
- 第二节 力的合成
- 第三节 力的平衡
- 第八章 压强
- 第一节 压力的作用效果
- 第二节 科学探究:液体的压强
- 第三节 空气的“力量”
- 第四节 流体压强与流速的关系
- 第九章 浮力
- 第一节 认识浮力
- 第二节 阿基米德原理
- 第三节 物体的浮与沉
- 第十章 机械与人
- 第一节 科学探究:杠杆的平衡条件
- 第二节 滑轮及其应用
- 第三节 做功了吗
- 第四节 做功的快慢
- 第五节 机械效率
- 第六节 合理利用机械能
- 第十一章 小粒子与大宇宙
- 第一节 走进微观
- 第二节 看不见的运动
- 第三节 探索宇宙