2019浙教版中考科学复习-物理-12、简单机械
文档属性
| 名称 | 2019浙教版中考科学复习-物理-12、简单机械 |
|
|
| 格式 | zip | ||
| 文件大小 | 181.2KB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 科学 | ||
| 更新时间 | 2019-04-23 00:00:00 | ||
图片预览
文档简介
2019浙教版中考复习物理——12、简单机械
一、知识点
1.物理学中,一般把一根在力的作用下可绕固定点转动的硬棒叫做杠杆。
2.杠杆绕着转动的点叫做支点;使杠杆转动的力叫做动力;阻碍杠杆转动的力叫做阻力;从支点到动力作用线的距离叫做动力臂;从支点到阻力作用线的距离叫阻力臂。
3.杠杆的平衡条件:动力×动力臂=阻力×阻力臂
4.动力臂大于阻力臂的是省力杠杆;动力臂小于阻力臂的是费力杠杆。
5.定滑轮在使用时,不随物体移动而移动,定滑轮本质上是等臂杠杆,不能省力但能改变力的方向;动滑轮在使用时,随着物体的移动而移动,动滑轮本质上是省力杠杆,可以省力但不改变力的方向。
6.由动滑轮和定滑轮组合而成的机械叫做滑轮组,其特点是能省力,有的既能省力又能改变力的方向。滑轮组绳子端的拉力为(不计摩擦)。
二、例题精讲
【例1】★
学校里的工人师傅使用如图所示的剪刀修剪树枝时,常把树枝尽量往剪刀轴O靠近,这样做的目的是( )
A. 增大阻力臂,减小动力移动的距离 B. 增大动力臂,省力
C. 减小阻力臂,减小动力移动的距离 D. 减小阻力臂,省力
【例2】★★
图中F1、F2和F3是分别作用在杠杆上使之在图示位置保持平衡的力,其中的最小拉力是( )
A. F1 B. F2 C. F3 D. 三个力都一样
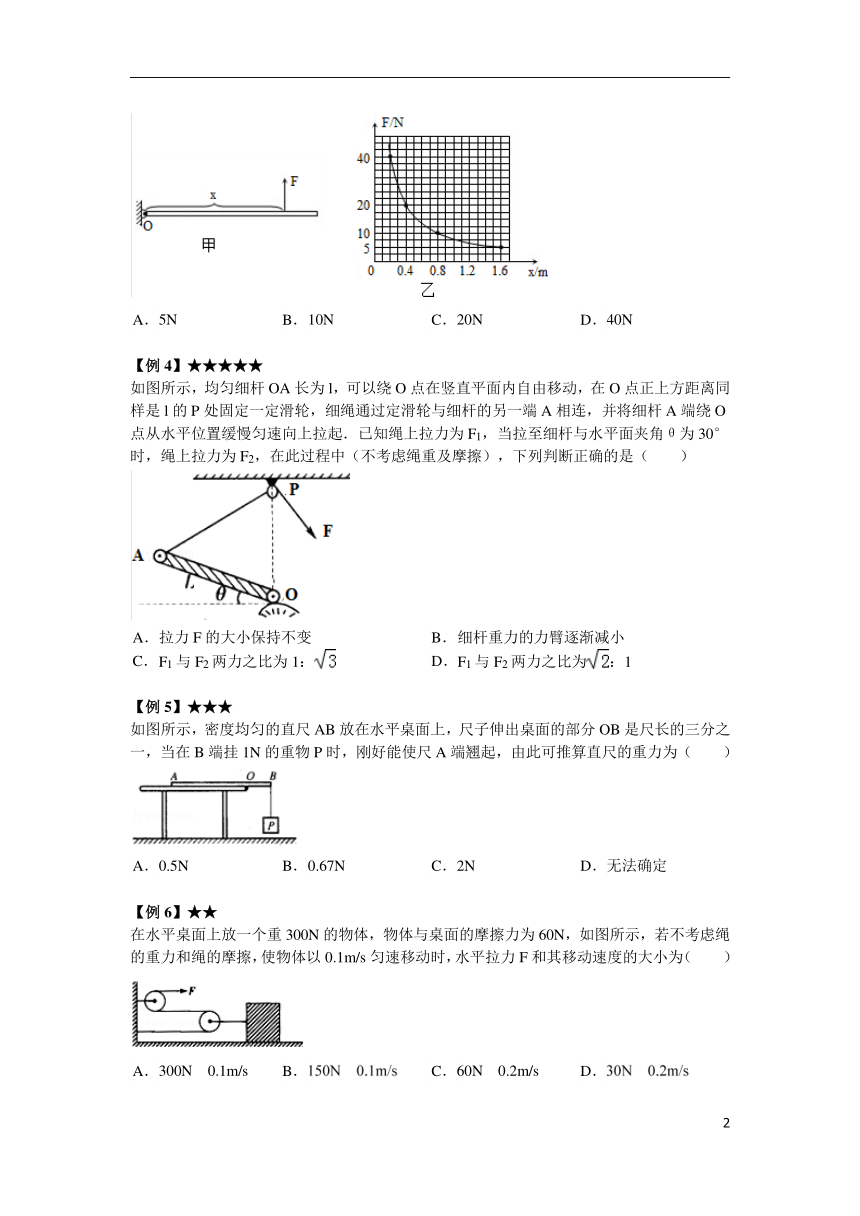
【例3】★★★
如图甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一拉力﹣﹣位移传感器竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙所示.据图可知金属杆重( )
A. 5N B. 10N C. 20N D. 40N
【例4】★★★★★
如图所示,均匀细杆OA长为l,可以绕O点在竖直平面内自由移动,在O点正上方距离同样是l的P处固定一定滑轮,细绳通过定滑轮与细杆的另一端A相连,并将细杆A端绕O点从水平位置缓慢匀速向上拉起.已知绳上拉力为F1,当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,在此过程中(不考虑绳重及摩擦),下列判断正确的是( )
A. 拉力F的大小保持不变 B. 细杆重力的力臂逐渐减小
C. F1与F2两力之比为1: D. F1与F2两力之比为:1
【例5】★★★
如图所示,密度均匀的直尺AB放在水平桌面上,尺子伸出桌面的部分OB是尺长的三分之一,当在B端挂1N的重物P时,刚好能使尺A端翘起,由此可推算直尺的重力为( )
A. 0.5N B. 0.67N C. 2N D. 无法确定
【例6】★★
在水平桌面上放一个重300N的物体,物体与桌面的摩擦力为60N,如图所示,若不考虑绳的重力和绳的摩擦,使物体以0.1m/s匀速移动时,水平拉力F和其移动速度的大小为( )
A. 300N 0.1m/s B. 150N 0.1m/s? C. 60N 0.2m/s D. 30N 0.2m/s?
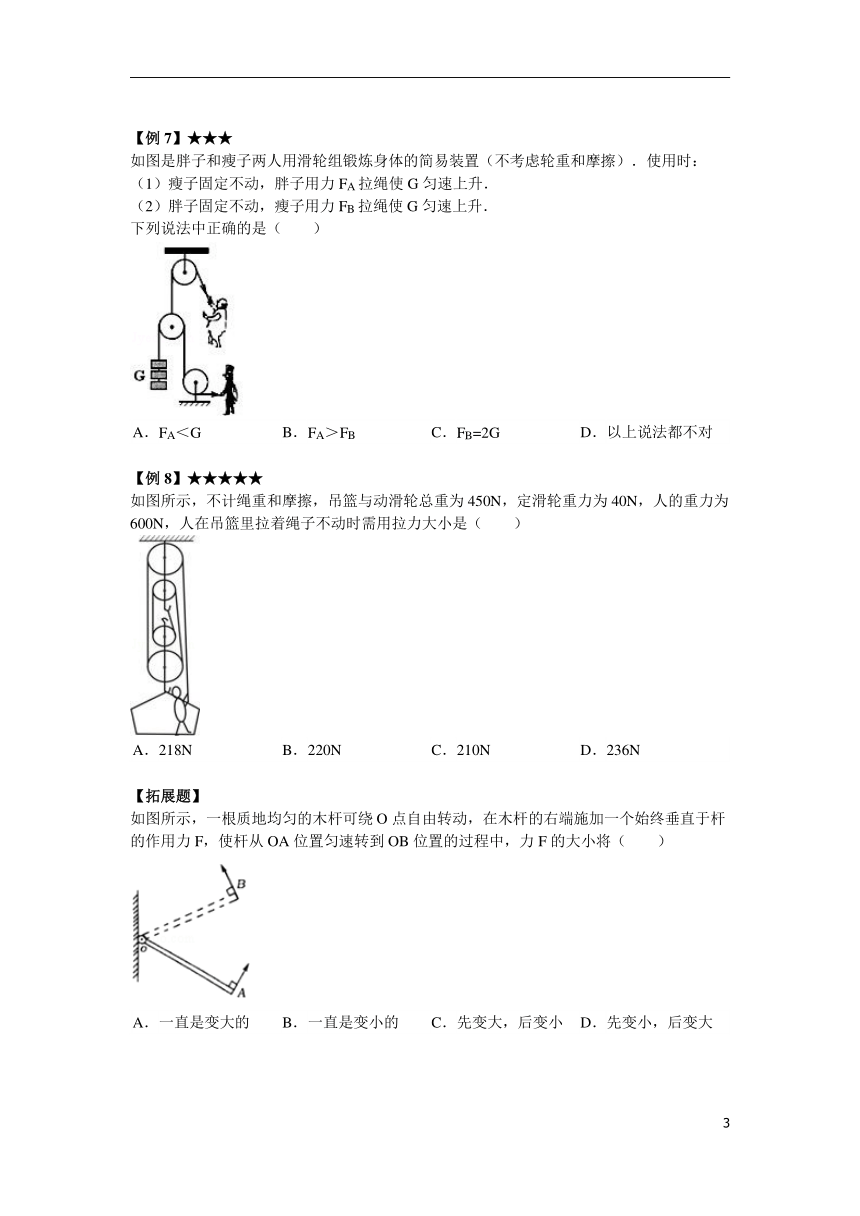
【例7】★★★
如图是胖子和瘦子两人用滑轮组锻炼身体的简易装置(不考虑轮重和摩擦).使用时:
(1)瘦子固定不动,胖子用力FA拉绳使G匀速上升.
(2)胖子固定不动,瘦子用力FB拉绳使G匀速上升.
下列说法中正确的是( )
A. FA<G B. FA>FB C. FB=2G D. 以上说法都不对
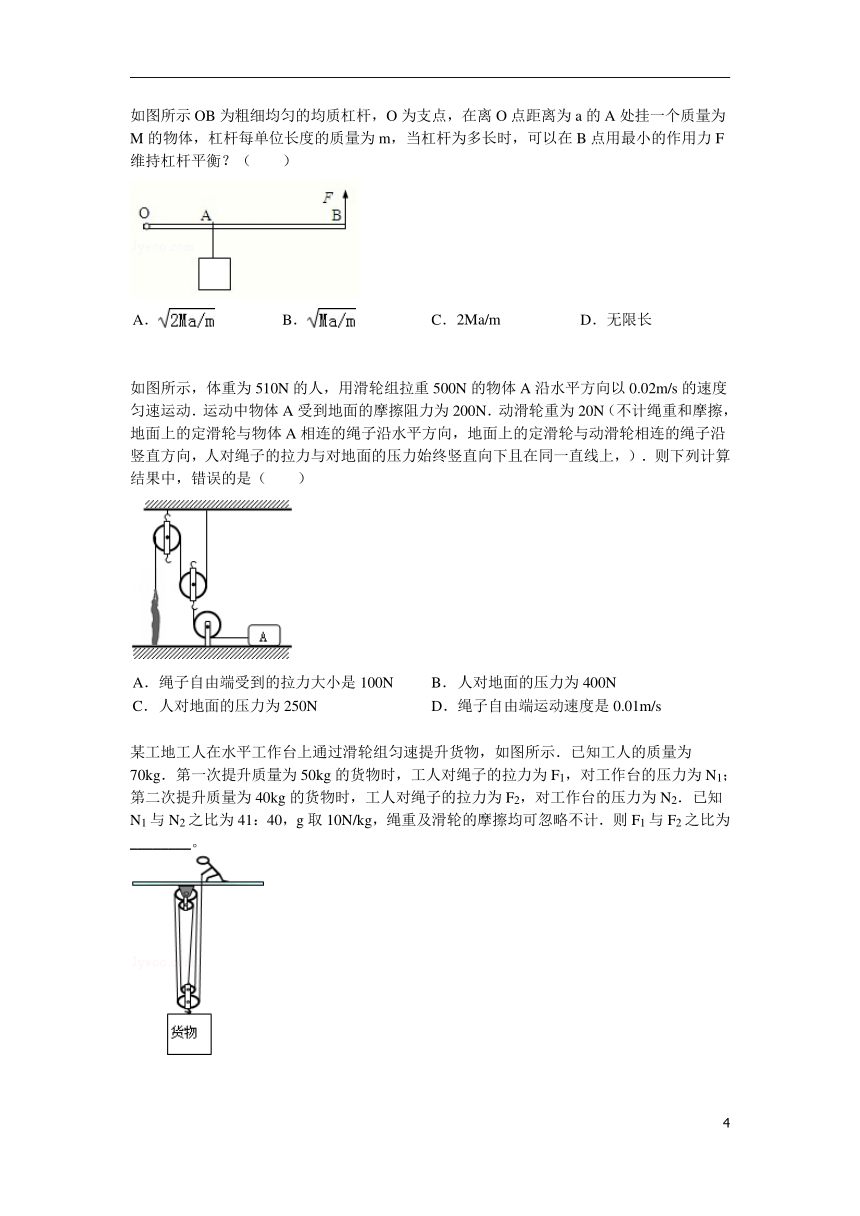
【例8】★★★★★
如图所示,不计绳重和摩擦,吊篮与动滑轮总重为450N,定滑轮重力为40N,人的重力为600N,人在吊篮里拉着绳子不动时需用拉力大小是( )
A. 218N B. 220N C. 210N D. 236N
【拓展题】
如图所示,一根质地均匀的木杆可绕O点自由转动,在木杆的右端施加一个始终垂直于杆的作用力F,使杆从OA位置匀速转到OB位置的过程中,力F的大小将( )
A. 一直是变大的 B. 一直是变小的 C. 先变大,后变小 D. 先变小,后变大
如图所示OB为粗细均匀的均质杠杆,O为支点,在离O点距离为a的A处挂一个质量为M的物体,杠杆每单位长度的质量为m,当杠杆为多长时,可以在B点用最小的作用力F维持杠杆平衡?( )
A. B. C. 2Ma/m D. 无限长
如图所示,体重为510N的人,用滑轮组拉重500N的物体A沿水平方向以0.02m/s的速度匀速运动.运动中物体A受到地面的摩擦阻力为200N.动滑轮重为20N(不计绳重和摩擦,地面上的定滑轮与物体A相连的绳子沿水平方向,地面上的定滑轮与动滑轮相连的绳子沿竖直方向,人对绳子的拉力与对地面的压力始终竖直向下且在同一直线上,).则下列计算结果中,错误的是( )
A. 绳子自由端受到的拉力大小是100N B. 人对地面的压力为400N
C. 人对地面的压力为250N D. 绳子自由端运动速度是0.01m/s
某工地工人在水平工作台上通过滑轮组匀速提升货物,如图所示.已知工人的质量为70kg.第一次提升质量为50kg的货物时,工人对绳子的拉力为F1,对工作台的压力为N1;第二次提升质量为40kg的货物时,工人对绳子的拉力为F2,对工作台的压力为N2.已知N1与N2之比为41:40,g取10N/kg,绳重及滑轮的摩擦均可忽略不计.则F1与F2之比为________。
参考答案
1、
考点: 杠杆的应用.
专题: 简单机械.
分析: 剪树枝时,用剪刀口的中部,而不用剪刀尖,减小了阻力臂,就减小了动力,在阻力、动力臂一定的情况下,根据杠杆的平衡条件知道减小了动力、更省力.
解答: 解:用剪刀口的中部,而不用剪刀尖去剪树枝,减小了阻力臂L2,而动力臂L1和阻力F2不变, ∵F1L1=F2L2, ∴F1=将变小,即省力. 故选D.
2、
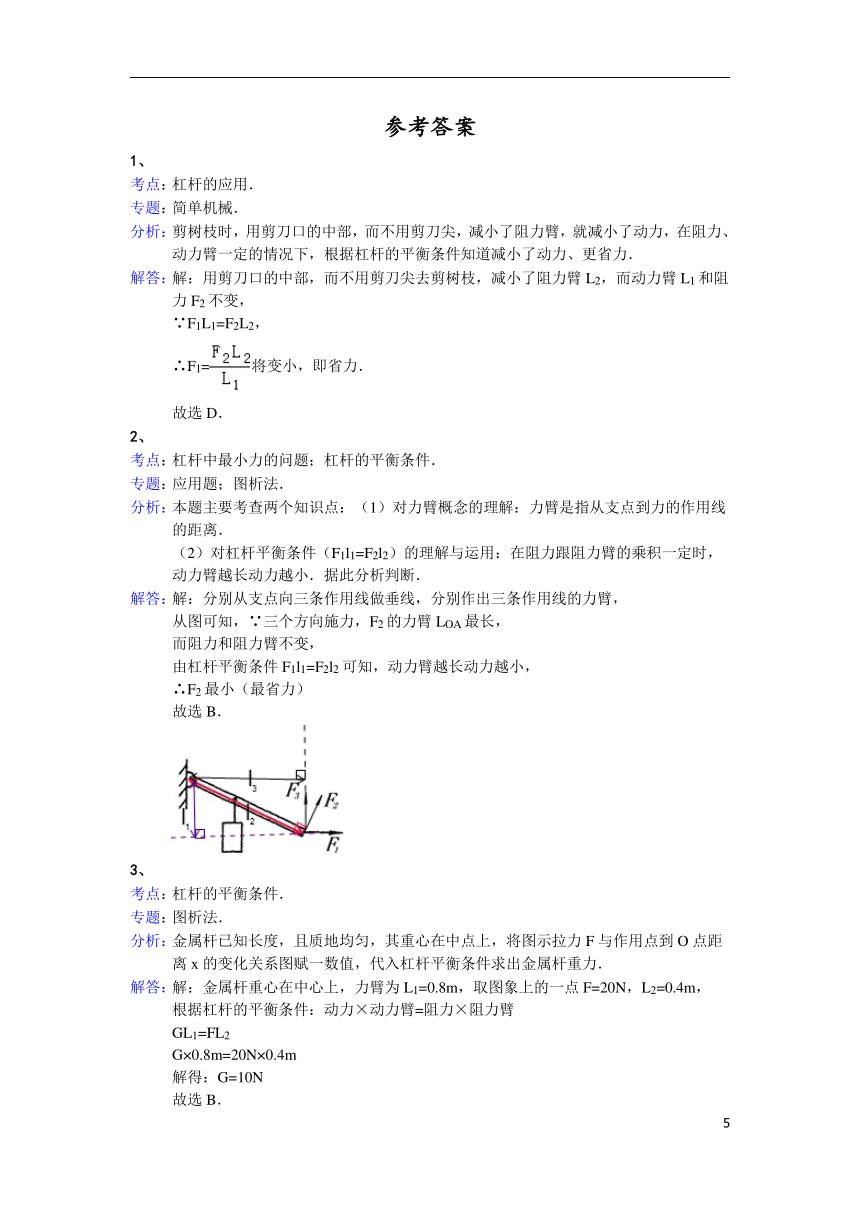
考点: 杠杆中最小力的问题;杠杆的平衡条件.
专题: 应用题;图析法.
分析: 本题主要考查两个知识点:(1)对力臂概念的理解:力臂是指从支点到力的作用线的距离. (2)对杠杆平衡条件(F1l1=F2l2)的理解与运用:在阻力跟阻力臂的乘积一定时,动力臂越长动力越小.据此分析判断.
解答: 解:分别从支点向三条作用线做垂线,分别作出三条作用线的力臂, 从图可知,∵三个方向施力,F2的力臂LOA最长, 而阻力和阻力臂不变, 由杠杆平衡条件F1l1=F2l2可知,动力臂越长动力越小, ∴F2最小(最省力) 故选B.
3、
考点: 杠杆的平衡条件.
专题: 图析法.
分析: 金属杆已知长度,且质地均匀,其重心在中点上,将图示拉力F与作用点到O点距离x的变化关系图赋一数值,代入杠杆平衡条件求出金属杆重力.
解答: 解:金属杆重心在中心上,力臂为L1=0.8m,取图象上的一点F=20N,L2=0.4m, 根据杠杆的平衡条件:动力×动力臂=阻力×阻力臂 GL1=FL2 G×0.8m=20N×0.4m 解得:G=10N 故选B.
4、
考点: 杠杆的动态平衡分析.
专题: 错解分析题;简单机械.
分析: 找出杠杆即将离开水平位置和把吊桥拉起到与水平面的夹角为30°时的动力臂和阻力臂,然后结合利用杠杆的平衡条件分别求出F1、F2的大小.
解答: 解:(1)细杆处于水平位置时,如右上图,△PAO和△PCO都为等腰直角三角形,OC=PC,PO=OA=l,OB=l; ∵(PC)2+(OC)2=(PO)2, ∴OC=l, ∵杠杆平衡, ∴F1×OC=G×OB, F1===G, (2)当拉至细杆与水平面夹角θ为30°时,绳上拉力为F2,如右下图,△PAO为等边三角形, AB=PA=l,AC′=l, ∵(AC′)2+(OC′)2=(OA)2 ∴OC′=l, 在△ABB′中,∠BOB′=30°,BB′=OB=×l=l, ∵(OB′)2+(BB′)2=(OB)2, ∴OB′=l, ∵OB′<OB, ∴细杆重力的力臂逐渐减小,故B正确; ∵杠杆平衡, ∴F2×OC′=G×OB′, F2===G, ∴F1>F2,故A错误; 则F1:F2=G:G=:1,故C错误,D正确. 故选:BD.
5、
考点: 杠杆的平衡条件.
专题: 应用题;简单机械.
分析: 密度均匀的直尺,其重心在直尺的中点处,则重力力臂为支点到直尺中心的长度;又已知B端的物重和B端到支点的距离,根据杠杆平衡的条件:动力乘以动力臂等于阻力乘以阻力臂即可求出直尺的重力.
解答: 解:设直尺长为L, 从图示可以看出:杠杆的支点为O,动力大小等于物重1N,动力臂为L; 阻力为直尺的重力G′,阻力的力臂为L﹣L=L. 由杠杆平衡的条件得:G′L′=GL, 即:G′×L=1N×L 解得:G′=2N 所以直尺的重力大小为2N. 故选C.
6、
考点: 滑轮组绳子拉力的计算;滑轮组及其工作特点.
专题: 简单机械.
分析: (1)如图,物体在水平方向上做匀速直线运动,根据二力平衡的条件可知物体所受的拉力等于物体受到的摩擦力,然后根据定滑轮和动滑轮的工作特点,即可求出绳子末端拉力与摩擦力之间的关系. (2)有两段绳子与动滑轮接触,绳端移动的距离是物体移动距离的2倍,则速度也是物体移动速度的2倍.
解答: 解:(1)由于物体在水平面上做匀速直线运动,所以物体所受拉力等于物体受到的摩擦力;滑轮组是由两根绳子承担动滑轮,所以绳子末端拉力F=f=×60N=30N. (2)有两段绳子与动滑轮接触,绳子自由端移动的距离是物体移动距离的2倍,故绳子自由端移动速度是物体移动速度的2倍,即v=0.1m/s×2=0.2m/s; 故选D.
7、
考点: 滑轮组绳子拉力的计算;定滑轮及其工作特点;动滑轮及其工作特点.
专题: 推理法.
分析: 分析当胖子和瘦子拉绳时,三个滑轮是动滑轮还是定滑轮,根据动滑轮和定滑轮的特点分析判断.
解答: 解:(1)瘦子固定不动,胖子拉绳使G匀速上升,此时中间滑轮为动滑轮,上下两个滑轮为定滑轮,FA=2G,故A错; (2)胖子固定不动,瘦子拉绳使G匀速上升,三个滑轮都是定滑轮,FB=G,故C错; 综合考虑(1)(2)FA>FB,故B正确、D错. 故选B.
8、
考点: 滑轮组绳子拉力的计算.
专题: 整体思想.
分析: 本题可用整体法来进行分析,把动滑轮、人和吊篮作为一个整体,当吊篮不动时,整个系统处于平衡状态,那么由5段绳子所承受的拉力正好是人、动滑轮和吊篮的重力和.可据此求解.
解答: 解:将人、吊篮、动滑轮看作一个整体,由于他们处于静止状态,受力平衡. 则人的拉力F=(G人+G轮+G吊篮)=(600N+450N)=210N. 故选C.
拓展题
答案:C
考点:杠杆的平衡分析法及其应用.
解析:根据杠杆平衡条件F1L1=F2L2分析,将杠杆缓慢地由最初位置拉到水平位置时,动力臂不变,阻力不变,阻力力臂变大,所以动力变大.
当杠杆从水平位置拉到最终位置时,动力臂不变,阻力不变,阻力臂变小,所以动力变小.
故F先变大后变小.
故选C.
答案:A
考点:杠杆的平衡分析法及其应用.
解析:(1)由题意可知,杠杆的动力为F,动力臂为OB,阻力分别是重物G物和杠杆的重力G杠杆,阻力臂分别是OA和OB,重物的重力G物=Mg
杠杆的重力G杠杆=mg×OB,
由杠杆平衡条件F1L1=F2L2可得:
F?OB=G物?OA+G杠杆?OB,
(2)代入相关数据:
则F?OB=Mg?a+mg?OB?OB,
得:F?OB=Mga+mg?(OB)2,
移项得:mg?(OB)2﹣F?OB+Mga=0,
∵杠杆的长度OB是确定的,只有一个,所以该方程只能取一个解,
∴该方程根的判别式b2﹣4ac等于0,因为当b2﹣4ac=0时,方程有两个相等的实数根,即有一个解,
即:则F2﹣4×mg×Mga=0,
则F2=2mMg2a,
得F=?g,
(3)将F=?g代入方程mg?(OB)2﹣F?OB+Mga=0,
解得OB=.
故选A.
答案:ACD
考点:滑轮组绳子拉力的计算;速度的计算.
解析:A、由图知,n=2,不计绳重和摩擦,
拉力F=(G轮+f地)=(20N+200N)=110N,故A错,符合题意;
BC、人对地面的压力F压=G﹣F=510N﹣110N=400N,故B正确、C错;
D、绳子自由端运动速度v=2×0.02m/s=0.04m/s,故D错.
故选ACD.
答案:6:5
考点:滑轮组绳子拉力的计算.
解析:由图知,滑轮组由5段绳子承担物重,第一次工人对绳子的拉力F1=(G物+G动);
N1=G人+F1=m人g+(m物g+G动);
同理,第二次N2=m人g+(m物′g+G动);
又N1与N2之比为41:40,
=
代入数据:=
解得G动=100N
则F1=(G物+G动)=×(50kg×10N/kg+100N)=120N;
F2=(G物′+G动)=×(40kg×10N/kg+100N)=100N;
==
故答案为:6:5.
(
1
)
同课章节目录