第14课 机器人分辨颜色 课件(24张PPT)
文档属性
| 名称 | 第14课 机器人分辨颜色 课件(24张PPT) |

|
|
| 格式 | zip | ||
| 文件大小 | 15.1MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-04-28 00:00:00 | ||
图片预览
文档简介
课件24张PPT。14、机器人分辨颜色学习目标1、了解地面监测传感器,学会利用“地面检测”模块编写程序。2、初步学会在仿真软件中编辑场景。3、了解程序的选择结构及其在程序中的作用。机器人是怎样行走的?我们可以利用执行模块库中的“直行”“转向”“启动电机”“停止电机”等模块编写程序,控制机器人的行走,使机器人初步学会行走,并在方针环境中写出7、8、9等数字。
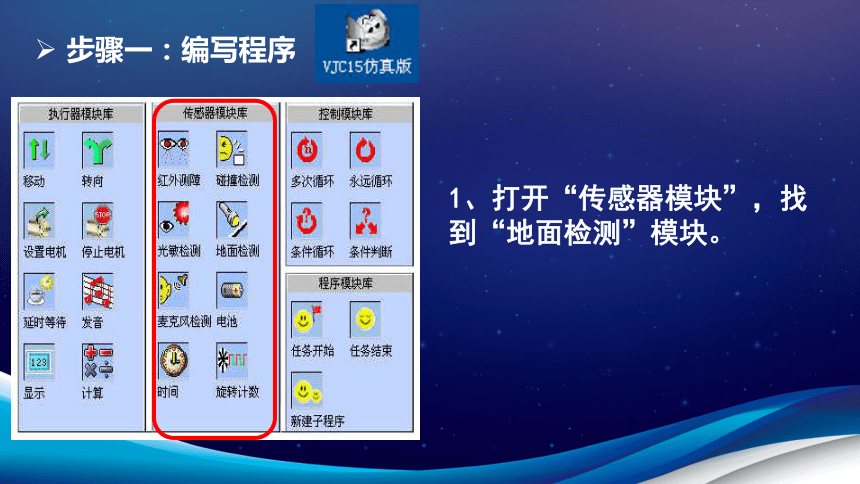
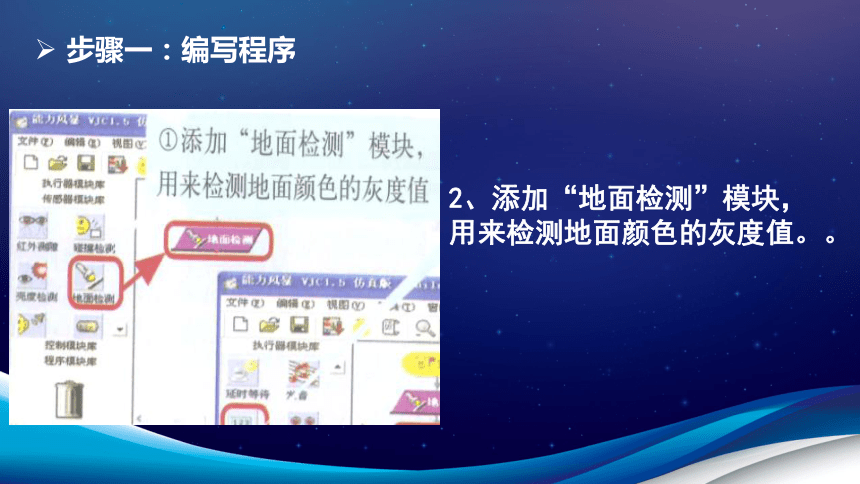
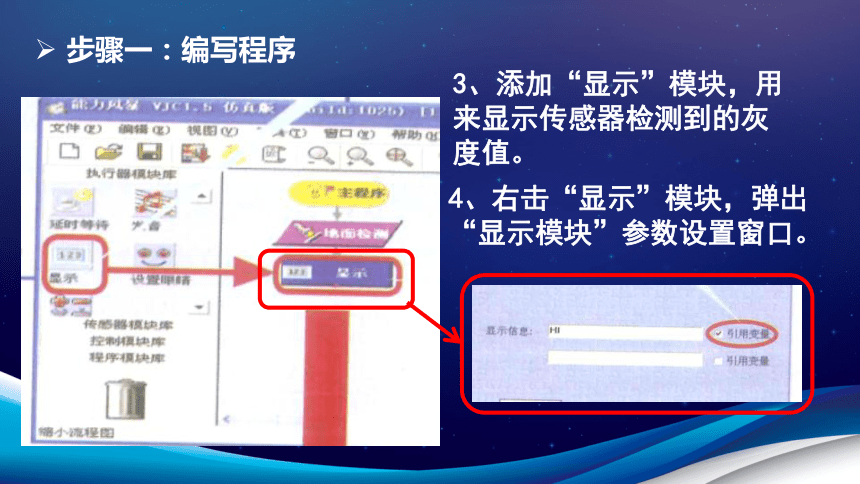
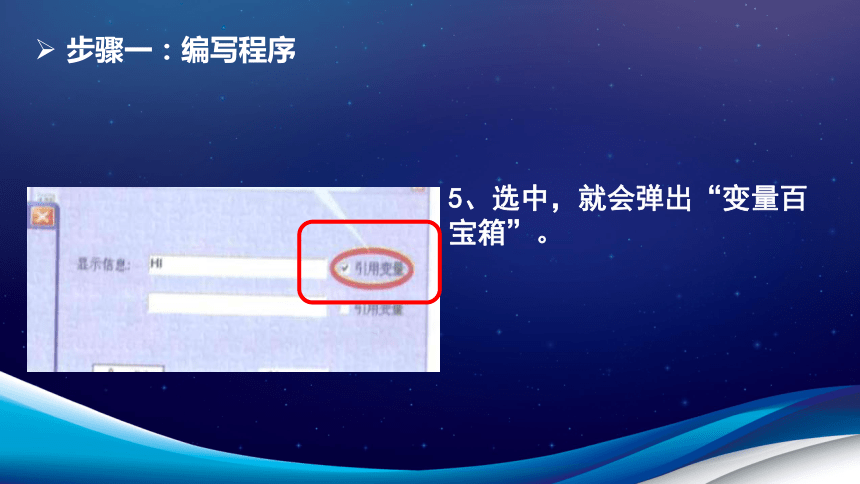
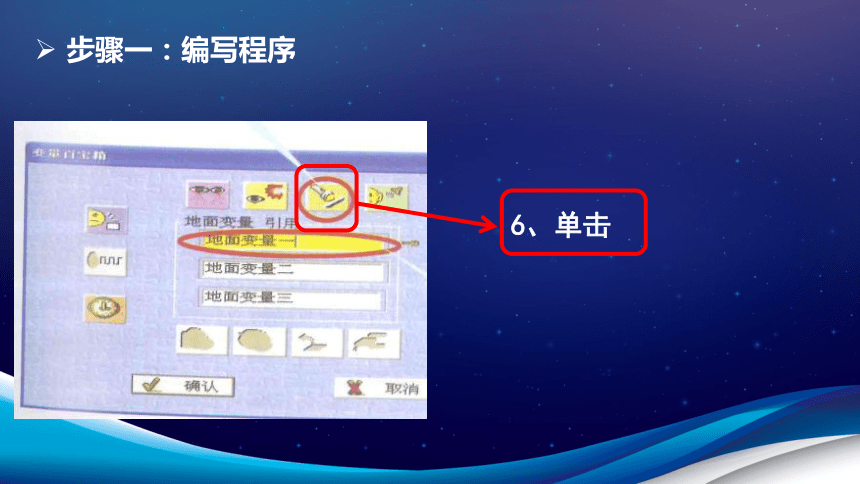
机器人通过传感器获取外界信息,不同的传感器可以获取不同的信息,如我们可以让机器人通过地面检测传感器识别地面颜色。机器人是怎样获取外界信息的?第一部分PART.01机器人识别颜色1、打开“传感器模块”,找到“地面检测”模块。步骤一:编写程序2、添加“地面检测”模块,用来检测地面颜色的灰度值。。步骤一:编写程序4、右击“显示”模块,弹出“显示模块”参数设置窗口。步骤一:编写程序3、添加“显示”模块,用来显示传感器检测到的灰度值。5、选中,就会弹出“变量百宝箱”。步骤一:编写程序6、单击步骤一:编写程序7、单击,选择“地面变量一”“显示”模块参数设置步骤一:编写程序地面检测传感器由一个发光管和一个光敏电阻组成。发光管照射地面,光敏电阻检测地面发射光的强度。不同的颜色反射光的强度是不同的,颜色越深,反射光越弱,检测到的数值就越大。例如,黑色为255,白色为0.地面检测传感器检测到的是不同颜色的灰度。就像黑白照片中的景物一样,不管是红花、绿树,还是漂亮的衣服,从照片上看全是深浅不同的灰色。知 识 林步骤二:环境编辑在仿真环境中,
我们可以自由设置步骤二:环境编辑1、进入仿真环境,单击“实体”,
2、选择“添加图带”,再选择图带形状,这时光标移到“显示区”变成“+”,然后按住鼠标左键拖动就可以画出相应的图带。默认图带是白色的,颜色可以设置。
3、把编辑好的场景以“色带场景'为 文件名保存。步骤三:运行程序把机器人放到不同颜色的图带上,在显示区会显示不同的灰度值。记录机器人在不同色带上地面检测传感器显示的值。记 录设计一个程序,控制机器人识别颜色。练一练第二部分PART.02机器人过河我们现在来设计一个程序帮助机器人顺利通过小桥。
如果机器人在桥上,就让它前进,不在桥上就让它转向。步骤一:编写程序1、添加“地面检测”模块,并设置模块参数。“地面变量一”等于85,就是指机器人在黄色色带上,这是程序中判断的条件。步骤一:编写程序如果“地面检测”模块还需要进行判断,模块形状由 变成
然后在“是”的一端添加“前进”,在“否”的一端添加“转向”步骤二:调试程序把机器人放到场地中观察它做的动作,调整机器人“前进”与“转向”的相关参数,看能否使机器人实现预设效果。在程序的执行过程中,有时需要通过判断来决定程序如何向下执行,这样的程序结构叫“选择结构”。它的执行过程是这样的:当条件成立时,执行“是”一侧连接的模块;当条件不成立时,执行“否”一侧连接的模块。知 识 林编写一个程序,能判断黑白区域。
要求:当机器人在白色区域时,能发出声音。练一练谢 谢
机器人通过传感器获取外界信息,不同的传感器可以获取不同的信息,如我们可以让机器人通过地面检测传感器识别地面颜色。机器人是怎样获取外界信息的?第一部分PART.01机器人识别颜色1、打开“传感器模块”,找到“地面检测”模块。步骤一:编写程序2、添加“地面检测”模块,用来检测地面颜色的灰度值。。步骤一:编写程序4、右击“显示”模块,弹出“显示模块”参数设置窗口。步骤一:编写程序3、添加“显示”模块,用来显示传感器检测到的灰度值。5、选中,就会弹出“变量百宝箱”。步骤一:编写程序6、单击步骤一:编写程序7、单击,选择“地面变量一”“显示”模块参数设置步骤一:编写程序地面检测传感器由一个发光管和一个光敏电阻组成。发光管照射地面,光敏电阻检测地面发射光的强度。不同的颜色反射光的强度是不同的,颜色越深,反射光越弱,检测到的数值就越大。例如,黑色为255,白色为0.地面检测传感器检测到的是不同颜色的灰度。就像黑白照片中的景物一样,不管是红花、绿树,还是漂亮的衣服,从照片上看全是深浅不同的灰色。知 识 林步骤二:环境编辑在仿真环境中,
我们可以自由设置步骤二:环境编辑1、进入仿真环境,单击“实体”,
2、选择“添加图带”,再选择图带形状,这时光标移到“显示区”变成“+”,然后按住鼠标左键拖动就可以画出相应的图带。默认图带是白色的,颜色可以设置。
3、把编辑好的场景以“色带场景'为 文件名保存。步骤三:运行程序把机器人放到不同颜色的图带上,在显示区会显示不同的灰度值。记录机器人在不同色带上地面检测传感器显示的值。记 录设计一个程序,控制机器人识别颜色。练一练第二部分PART.02机器人过河我们现在来设计一个程序帮助机器人顺利通过小桥。
如果机器人在桥上,就让它前进,不在桥上就让它转向。步骤一:编写程序1、添加“地面检测”模块,并设置模块参数。“地面变量一”等于85,就是指机器人在黄色色带上,这是程序中判断的条件。步骤一:编写程序如果“地面检测”模块还需要进行判断,模块形状由 变成
然后在“是”的一端添加“前进”,在“否”的一端添加“转向”步骤二:调试程序把机器人放到场地中观察它做的动作,调整机器人“前进”与“转向”的相关参数,看能否使机器人实现预设效果。在程序的执行过程中,有时需要通过判断来决定程序如何向下执行,这样的程序结构叫“选择结构”。它的执行过程是这样的:当条件成立时,执行“是”一侧连接的模块;当条件不成立时,执行“否”一侧连接的模块。知 识 林编写一个程序,能判断黑白区域。
要求:当机器人在白色区域时,能发出声音。练一练谢 谢