第15课 综合任务:机器人赛跑 课件(17张PPT)
文档属性
| 名称 | 第15课 综合任务:机器人赛跑 课件(17张PPT) |

|
|
| 格式 | zip | ||
| 文件大小 | 10.4MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-04-30 00:00:00 | ||
图片预览




文档简介
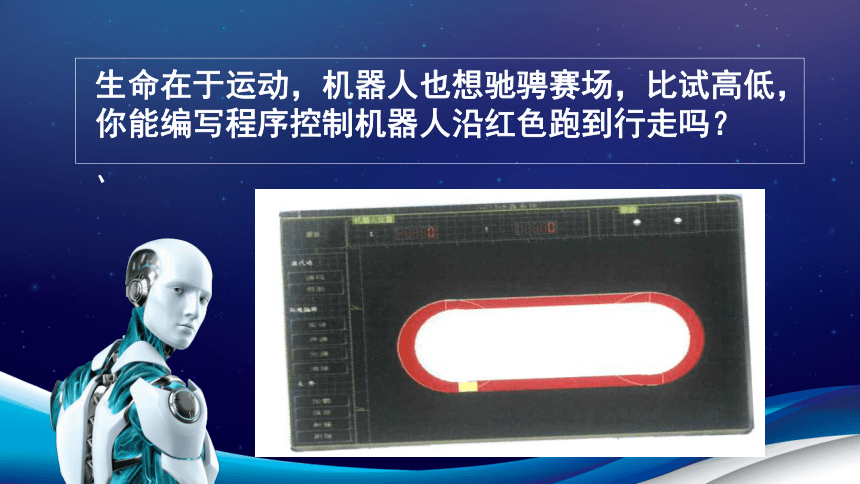
课件17张PPT。15、机器人赛跑学习目标1、进一步熟悉“地面检测”模块的使用。2、进一步理解循环与条件判断的执行过程。生命在于运动,机器人也想驰骋赛场,比试高低,你能编写程序控制机器人沿红色跑到行走吗?
、第一部分PART.01分析任务步骤一:打开软件并分析任务1、我们首先对任务进行分析,确定机器人完成任务的方法和步骤。
2、完成同一个任务的方法和步骤可能不一样,因而实现的程序也不同。步骤一:分析任务,
可以让机器人根据场地色带不同执行不同动作。假定机器人沿跑道逆时针方向行走,如果灰度传感器检测到红色色带,那么机器人前进一步。如果检测到的是白色色带,说明机器人在跑道的内侧,那么机器人向右转一点。如果检测到的是黑色色带,说明机器人在跑道的外侧,那么机器人向左转一点。这种“判断”需要不断重复执行。第二部分PART.02编写程序根据对任务的分析,判断色带需要重复执行,因此我们需要用到循环结构,这里选用“地面检测”模块和“永久循环”模块进行编程。。步骤一:编写程序分别添加“永久循环”和“地面检测”模块,并设置模块参数。步骤一:编写程序机器人在红色色带上时,每“前进”一步,检测一次,这一步不能太大,否则可能偏离红色色带。不在红色色带时,“转向”的角度也不能太大。小技巧第三部分PART.03调试运行步骤一:进入仿真环境程序能否够控制机器人完成任务,还需要我们根据调试效果,对程序或程序中某些模块的参数进行修改。
步骤二:调试程序进入仿真环境,加载场景。步骤二:调试程序设置机器人行走轨迹和摆放角度。编写一个程序,让机器人沿跑道赛跑。练一练谢 谢
、第一部分PART.01分析任务步骤一:打开软件并分析任务1、我们首先对任务进行分析,确定机器人完成任务的方法和步骤。
2、完成同一个任务的方法和步骤可能不一样,因而实现的程序也不同。步骤一:分析任务,
可以让机器人根据场地色带不同执行不同动作。假定机器人沿跑道逆时针方向行走,如果灰度传感器检测到红色色带,那么机器人前进一步。如果检测到的是白色色带,说明机器人在跑道的内侧,那么机器人向右转一点。如果检测到的是黑色色带,说明机器人在跑道的外侧,那么机器人向左转一点。这种“判断”需要不断重复执行。第二部分PART.02编写程序根据对任务的分析,判断色带需要重复执行,因此我们需要用到循环结构,这里选用“地面检测”模块和“永久循环”模块进行编程。。步骤一:编写程序分别添加“永久循环”和“地面检测”模块,并设置模块参数。步骤一:编写程序机器人在红色色带上时,每“前进”一步,检测一次,这一步不能太大,否则可能偏离红色色带。不在红色色带时,“转向”的角度也不能太大。小技巧第三部分PART.03调试运行步骤一:进入仿真环境程序能否够控制机器人完成任务,还需要我们根据调试效果,对程序或程序中某些模块的参数进行修改。
步骤二:调试程序进入仿真环境,加载场景。步骤二:调试程序设置机器人行走轨迹和摆放角度。编写一个程序,让机器人沿跑道赛跑。练一练谢 谢