第12课 机器人巡逻 课件(共22张PPT)
文档属性
| 名称 | 第12课 机器人巡逻 课件(共22张PPT) |
|
|
| 格式 | zip | ||
| 文件大小 | 2.6MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 浙教版 | ||
| 科目 | 信息技术(信息科技) | ||
| 更新时间 | 2019-06-11 00:00:00 | ||
图片预览






文档简介
课件22张PPT。内容机器人“正方形”巡逻仿真环境中的场景编辑“多次循环”模块 导入智慧京交会|替代安保 高新兴警用安保巡逻机器人亮相联通5G展厅5月30日,2019年 “京交会” 分论坛活动之一--- “北京联通5G生态合作大会”在国家会议中心召开。
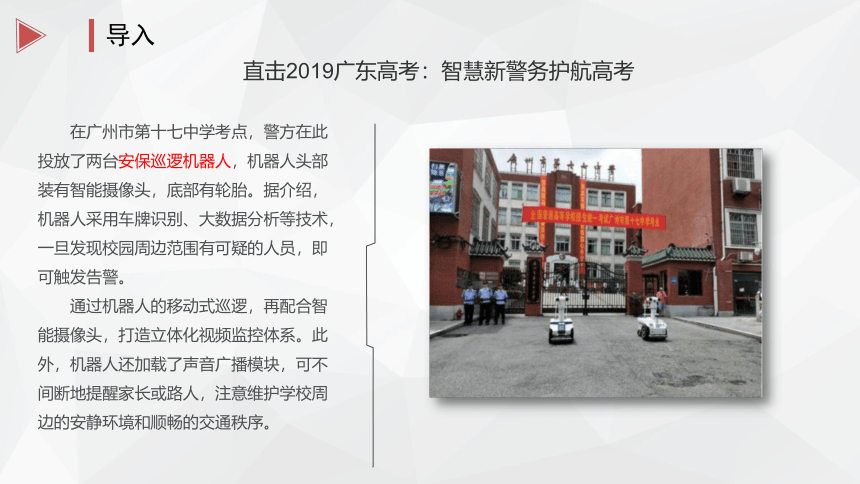
记者在联通5G展区看到一款可帮助人类完成基础性、重复性、危险性的安保工作的机器人---高新兴巡逻机器人。据介绍,这是一款综合运用物联网、人工智能、云计算、大数据等技术,集成环境感知、动态决策、行为控制和报警装置,具备自主感知、自主行走、自主保护、互动交流等能力,推动安保服务升级,降低安保运营成本的多功能综合智能装备。导入直击2019广东高考:智慧新警务护航高考在广州市第十七中学考点,警方在此投放了两台安保巡逻机器人,机器人头部装有智能摄像头,底部有轮胎。据介绍,机器人采用车牌识别、大数据分析等技术,一旦发现校园周边范围有可疑的人员,即可触发告警。
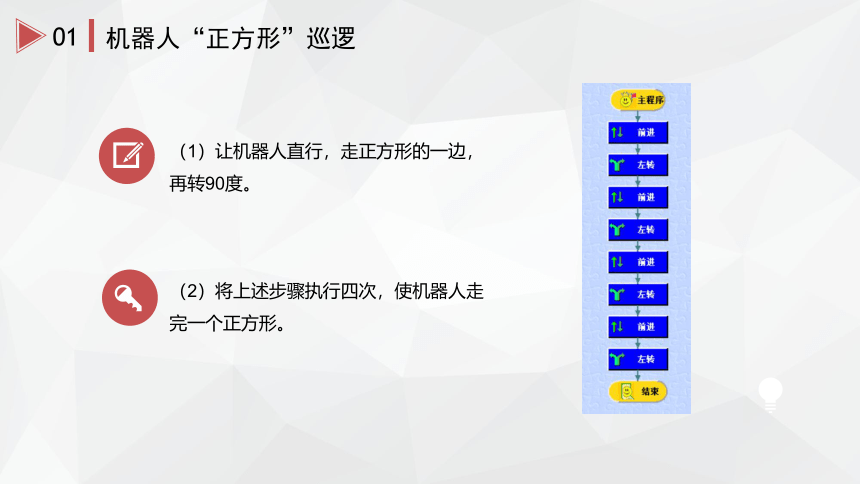
通过机器人的移动式巡逻,再配合智能摄像头,打造立体化视频监控体系。此外,机器人还加载了声音广播模块,可不间断地提醒家长或路人,注意维护学校周边的安静环境和顺畅的交通秩序。在各种活动中,出于安全的考虑,常需要对活动场地周围进行巡逻。本课我们通过设计程序控制机器人,让它模拟人的巡逻工作。导入第 一 章机器人“正方形”巡逻PART ONE01机器人“正方形”巡逻① 前进
② 左转90度
③ 前进
④ 左转90度
⑤ 前进
⑥ 左转90度
⑦ 前进
⑧ 左转90度01机器人“正方形”巡逻(1)让机器人直行,走正方形的一边,再转90度。(2)将上述步骤执行四次,使机器人走完一个正方形。01练一练控制机器人沿下图所示的路线行走①②③① 前进
② 右转120度
③ 前进
④右转120度
⑤ 前进
⑥右转120度④⑤ ⑥第 二 章仿真环境中的场景编辑PART TWO02仿真环境中的场景编辑在仿真环境中可以编辑机器人活动的场景,如障碍物、图带、声源和光源等,如图所示,场景编辑完毕后,可以把它保存为一个文件,便于今后的加载使用。
场景编辑步骤:
(1)在“环境编辑”中选择“实体”一“添加图带”一“矩形”。
(2)在“机器人运行区”中拖动鼠标,绘制出一个矩形。
(3)设置矩形长和宽的参数。
(4)单击“保存”按钮,将绘制的场景保存为一个文件。
02仿真环境中的场景编辑清除场景中
的所有图形保存场景输入数据后按回
车键可以改变矩
形的长和宽单击按钮,可以
编辑图形颜色模拟场景设置02露一手在仿真环境中,单击“实体”菜单中“删除”按钮,然后用鼠标单击场景中要删除的对象,就可以删除此对象。第 三 章“多次循环”模块PART THREE03“多次循环”模块机器人沿正方形巡逻时,“直行”与“转向90度”两个动作重复了四次,我们利用“控制模块库”中的“多次循环”模块编程来简化程序,如图所示。
在图标上单击鼠标右键可以设置循环次数循环体“多次循环”模块的编程及参数设置第1步:启动VJC,打开流程图编辑窗口。
第2步:选定“控制模块库”面板中的“多次循环”按钮 ,再单击 模块上的红点,在流程图中添加“多次循环”模块。
第3步:选定“执行器模块库”面板中的 按钮,单击“多次循环”模块下的第一个红点,在循环体中添加 模块。
03“多次循环”模块第4步:选定 按钮,单击 模块上的红点,把 模块插入循环体。
第5步:在程序末尾添加 模块。操作后,流程图程序如右图所示。
第6步:以“走方边形”为文件名保存文件。03“多次循环”模块如果想使机器人围绕正方形再多转几圈,只要修改循环次数就可以达到目的;如果要使机器人一直不停地转下去,还可以用“永远循环”模块来设计程序。练一练设计一个程序,使机器人能沿“正六边形”巡逻。! 提示:用多次循环结构控制机器人沿正多边形的边行走时,循环次数=正多边形的边数
转动角度=360°÷ 循环次数 实际操作时,还可以控制机器人按照由矩形、三角形、圆形等组成的规则图形的边行走。
动手做:控制机器人沿下图所示的路线行走。
拓展第1步:编右图所示的流程图程序。
第2步:设置“走正方形”和“走正三角形”两部分的模块,分别控制机器人沿正方形的边和正三角形的边行走。
设置时,流程图中的
模块的属性要一致,使正方形与正三角形的边长相等。 拓展第3步:根据需要,适当设置“走正方形”和“走正三角形”之间的 模块的属性,控制机器人再右转90°,以便按指定路线行走。
第4步:运行程序,观察机器人的运动,然后根据观察的结果,调整程序,直到能控制机器人沿指定的路线行走。
拓展
记者在联通5G展区看到一款可帮助人类完成基础性、重复性、危险性的安保工作的机器人---高新兴巡逻机器人。据介绍,这是一款综合运用物联网、人工智能、云计算、大数据等技术,集成环境感知、动态决策、行为控制和报警装置,具备自主感知、自主行走、自主保护、互动交流等能力,推动安保服务升级,降低安保运营成本的多功能综合智能装备。导入直击2019广东高考:智慧新警务护航高考在广州市第十七中学考点,警方在此投放了两台安保巡逻机器人,机器人头部装有智能摄像头,底部有轮胎。据介绍,机器人采用车牌识别、大数据分析等技术,一旦发现校园周边范围有可疑的人员,即可触发告警。
通过机器人的移动式巡逻,再配合智能摄像头,打造立体化视频监控体系。此外,机器人还加载了声音广播模块,可不间断地提醒家长或路人,注意维护学校周边的安静环境和顺畅的交通秩序。在各种活动中,出于安全的考虑,常需要对活动场地周围进行巡逻。本课我们通过设计程序控制机器人,让它模拟人的巡逻工作。导入第 一 章机器人“正方形”巡逻PART ONE01机器人“正方形”巡逻① 前进
② 左转90度
③ 前进
④ 左转90度
⑤ 前进
⑥ 左转90度
⑦ 前进
⑧ 左转90度01机器人“正方形”巡逻(1)让机器人直行,走正方形的一边,再转90度。(2)将上述步骤执行四次,使机器人走完一个正方形。01练一练控制机器人沿下图所示的路线行走①②③① 前进
② 右转120度
③ 前进
④右转120度
⑤ 前进
⑥右转120度④⑤ ⑥第 二 章仿真环境中的场景编辑PART TWO02仿真环境中的场景编辑在仿真环境中可以编辑机器人活动的场景,如障碍物、图带、声源和光源等,如图所示,场景编辑完毕后,可以把它保存为一个文件,便于今后的加载使用。
场景编辑步骤:
(1)在“环境编辑”中选择“实体”一“添加图带”一“矩形”。
(2)在“机器人运行区”中拖动鼠标,绘制出一个矩形。
(3)设置矩形长和宽的参数。
(4)单击“保存”按钮,将绘制的场景保存为一个文件。
02仿真环境中的场景编辑清除场景中
的所有图形保存场景输入数据后按回
车键可以改变矩
形的长和宽单击按钮,可以
编辑图形颜色模拟场景设置02露一手在仿真环境中,单击“实体”菜单中“删除”按钮,然后用鼠标单击场景中要删除的对象,就可以删除此对象。第 三 章“多次循环”模块PART THREE03“多次循环”模块机器人沿正方形巡逻时,“直行”与“转向90度”两个动作重复了四次,我们利用“控制模块库”中的“多次循环”模块编程来简化程序,如图所示。
在图标上单击鼠标右键可以设置循环次数循环体“多次循环”模块的编程及参数设置第1步:启动VJC,打开流程图编辑窗口。
第2步:选定“控制模块库”面板中的“多次循环”按钮 ,再单击 模块上的红点,在流程图中添加“多次循环”模块。
第3步:选定“执行器模块库”面板中的 按钮,单击“多次循环”模块下的第一个红点,在循环体中添加 模块。
03“多次循环”模块第4步:选定 按钮,单击 模块上的红点,把 模块插入循环体。
第5步:在程序末尾添加 模块。操作后,流程图程序如右图所示。
第6步:以“走方边形”为文件名保存文件。03“多次循环”模块如果想使机器人围绕正方形再多转几圈,只要修改循环次数就可以达到目的;如果要使机器人一直不停地转下去,还可以用“永远循环”模块来设计程序。练一练设计一个程序,使机器人能沿“正六边形”巡逻。! 提示:用多次循环结构控制机器人沿正多边形的边行走时,循环次数=正多边形的边数
转动角度=360°÷ 循环次数 实际操作时,还可以控制机器人按照由矩形、三角形、圆形等组成的规则图形的边行走。
动手做:控制机器人沿下图所示的路线行走。
拓展第1步:编右图所示的流程图程序。
第2步:设置“走正方形”和“走正三角形”两部分的模块,分别控制机器人沿正方形的边和正三角形的边行走。
设置时,流程图中的
模块的属性要一致,使正方形与正三角形的边长相等。 拓展第3步:根据需要,适当设置“走正方形”和“走正三角形”之间的 模块的属性,控制机器人再右转90°,以便按指定路线行走。
第4步:运行程序,观察机器人的运动,然后根据观察的结果,调整程序,直到能控制机器人沿指定的路线行走。
拓展