虚拟机器人——迷宫探索课件(15张幻灯片)
文档属性
| 名称 | 虚拟机器人——迷宫探索课件(15张幻灯片) |
|
|
| 格式 | zip | ||
| 文件大小 | 1.0MB | ||
| 资源类型 | 教案 | ||
| 版本资源 | 通用版 | ||
| 科目 | 通用技术 | ||
| 更新时间 | 2019-06-28 00:00:00 | ||
图片预览

文档简介
课件15张PPT。虚实机器人
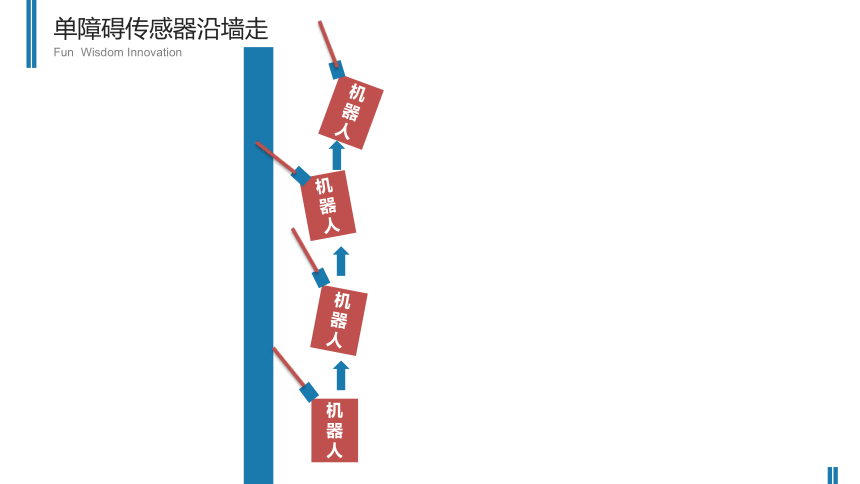
——迷宫探索 We Make You Happy Better Future For You有关迷宫的任务Fun Wisdom InnovationFun Wisdom Innovation迷宫法则迷宫法则:如果机器人太靠近迷宫的墙壁,则要让它远离墙壁;如果机器人远离墙壁,则要让他靠近墙壁。机器人就在远离墙壁和靠近墙壁的过程中向前运动。
左迷宫法则:机器人检测它左边的墙壁,如果离左边墙壁太近,则机器人右转;如果机器人离左边墙壁太远,则机器人左转。如果机器人前方也检测到墙壁,则机器人也要右转。
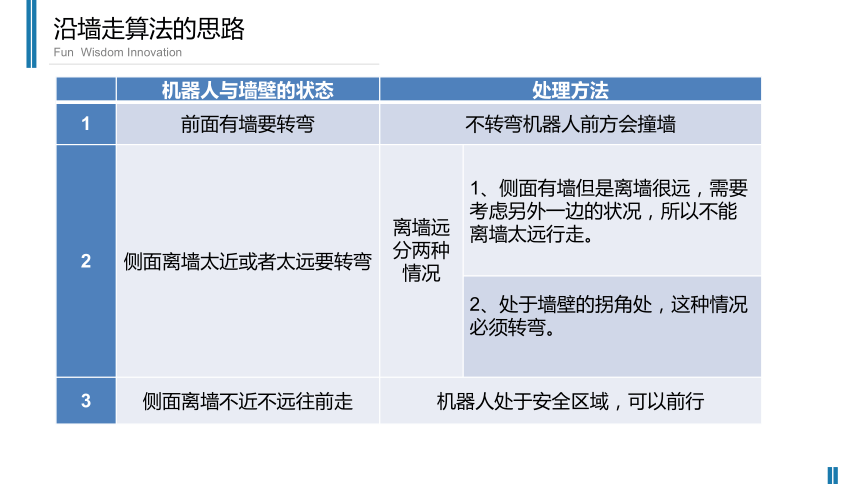
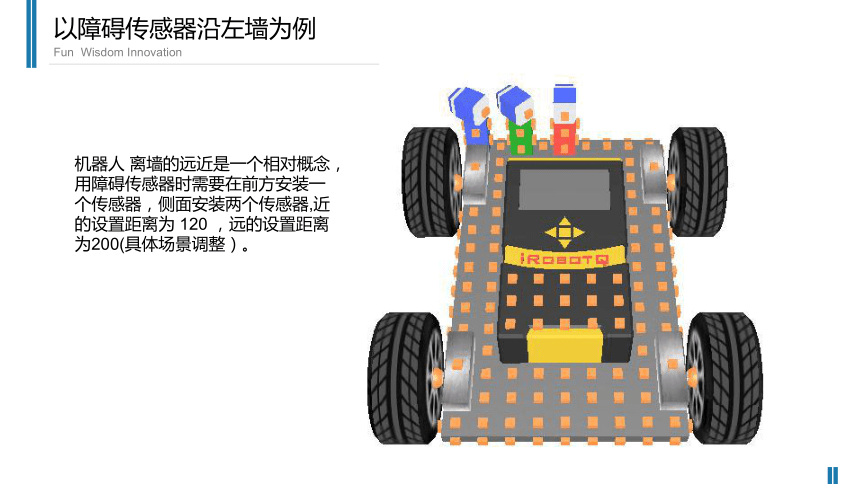
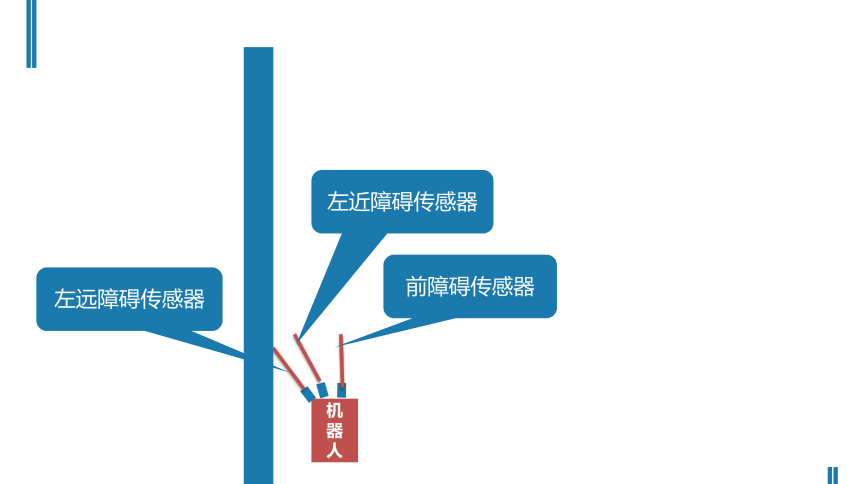
右迷宫法则:机器人检测它右边的墙壁,如果离右边墙壁太近,则机器人左转;如果机器人离右边墙壁太远,则机器人右转。如果机器人前方也检测到墙壁,则机器人也要左转。Fun Wisdom Innovation单障碍传感器沿墙走机器人机器人机器人机器人Fun Wisdom Innovation沿墙走算法的思路以障碍传感器沿左墙为例Fun Wisdom Innovation机器人 离墙的远近是一个相对概念,用障碍传感器时需要在前方安装一个传感器,侧面安装两个传感器,近的设置距离为 120 ,远的设置距离为200(具体场景调整)。 机器人前障碍传感器左近障碍传感器左远障碍传感器程序设计思路Fun Wisdom Innovation三个障碍传感器分析Fun Wisdom Innovation三个障碍传感器分析Fun Wisdom Innovation以距离传感器为例Fun Wisdom Innovation程序设计思路Fun Wisdom Innovation迷宫灭火思路Fun Wisdom InnovationTHANKS FOR YOUR WATCHING
——迷宫探索 We Make You Happy Better Future For You有关迷宫的任务Fun Wisdom InnovationFun Wisdom Innovation迷宫法则迷宫法则:如果机器人太靠近迷宫的墙壁,则要让它远离墙壁;如果机器人远离墙壁,则要让他靠近墙壁。机器人就在远离墙壁和靠近墙壁的过程中向前运动。
左迷宫法则:机器人检测它左边的墙壁,如果离左边墙壁太近,则机器人右转;如果机器人离左边墙壁太远,则机器人左转。如果机器人前方也检测到墙壁,则机器人也要右转。
右迷宫法则:机器人检测它右边的墙壁,如果离右边墙壁太近,则机器人左转;如果机器人离右边墙壁太远,则机器人右转。如果机器人前方也检测到墙壁,则机器人也要左转。Fun Wisdom Innovation单障碍传感器沿墙走机器人机器人机器人机器人Fun Wisdom Innovation沿墙走算法的思路以障碍传感器沿左墙为例Fun Wisdom Innovation机器人 离墙的远近是一个相对概念,用障碍传感器时需要在前方安装一个传感器,侧面安装两个传感器,近的设置距离为 120 ,远的设置距离为200(具体场景调整)。 机器人前障碍传感器左近障碍传感器左远障碍传感器程序设计思路Fun Wisdom Innovation三个障碍传感器分析Fun Wisdom Innovation三个障碍传感器分析Fun Wisdom Innovation以距离传感器为例Fun Wisdom Innovation程序设计思路Fun Wisdom Innovation迷宫灭火思路Fun Wisdom InnovationTHANKS FOR YOUR WATCHING
同课章节目录